Image Disocclusion for Virtual View Synthesis Pierre Buyssens, Maxime Daisy, David Tschumperlé, Olivier Lézoray GREYC, Image Team, University of Caen, France Nov. 2 2015
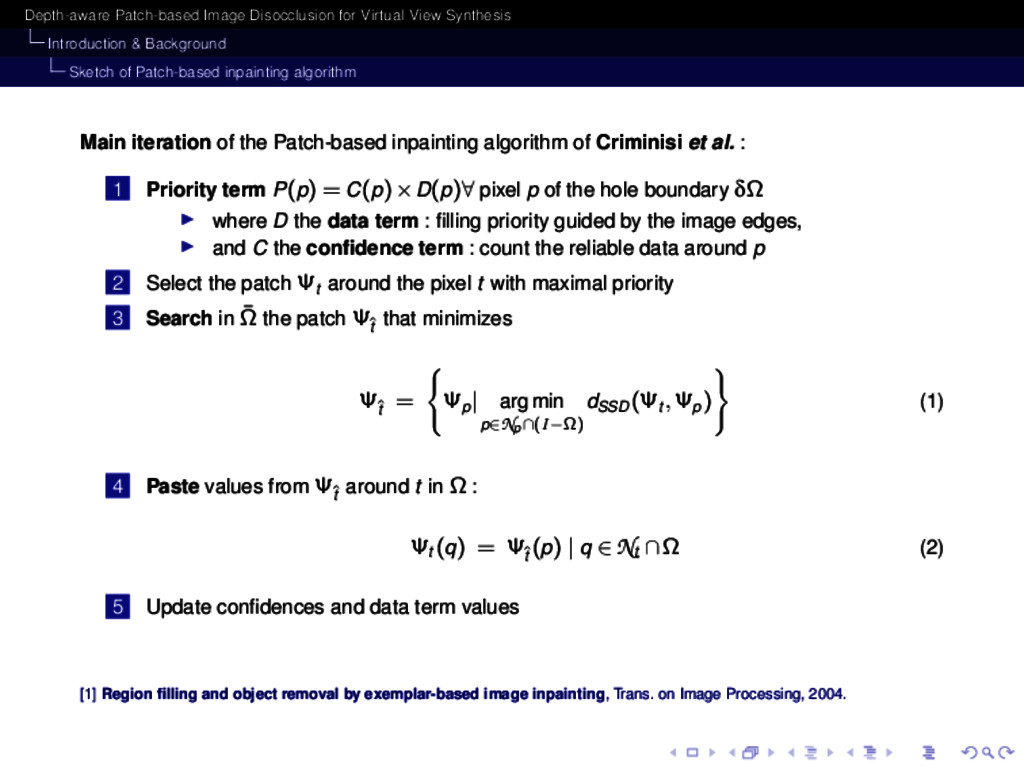
Background Sketch of Patch-based inpainting algorithm Main iteration of the Patch-based inpainting algorithm of Criminisi et al. : 1 Priority term P(p) = C(p)×D(p)∀ pixel p of the hole boundary δΩ where D the data term : filling priority guided by the image edges, and C the confidence term : count the reliable data around p 2 Select the patch Ψt around the pixel t with maximal priority 3 Search in ¯ Ω the patch Ψˆ t that minimizes Ψˆ t = Ψp | argmin p∈Np∩(I−Ω) dSSD (Ψt ,Ψp ) (1) 4 Paste values from Ψˆ t around t in Ω : Ψt (q) = Ψˆ t (p) | q ∈ Nt ∩Ω (2) 5 Update confidences and data term values [1] Region filling and object removal by exemplar-based image inpainting, Trans. on Image Processing, 2004.
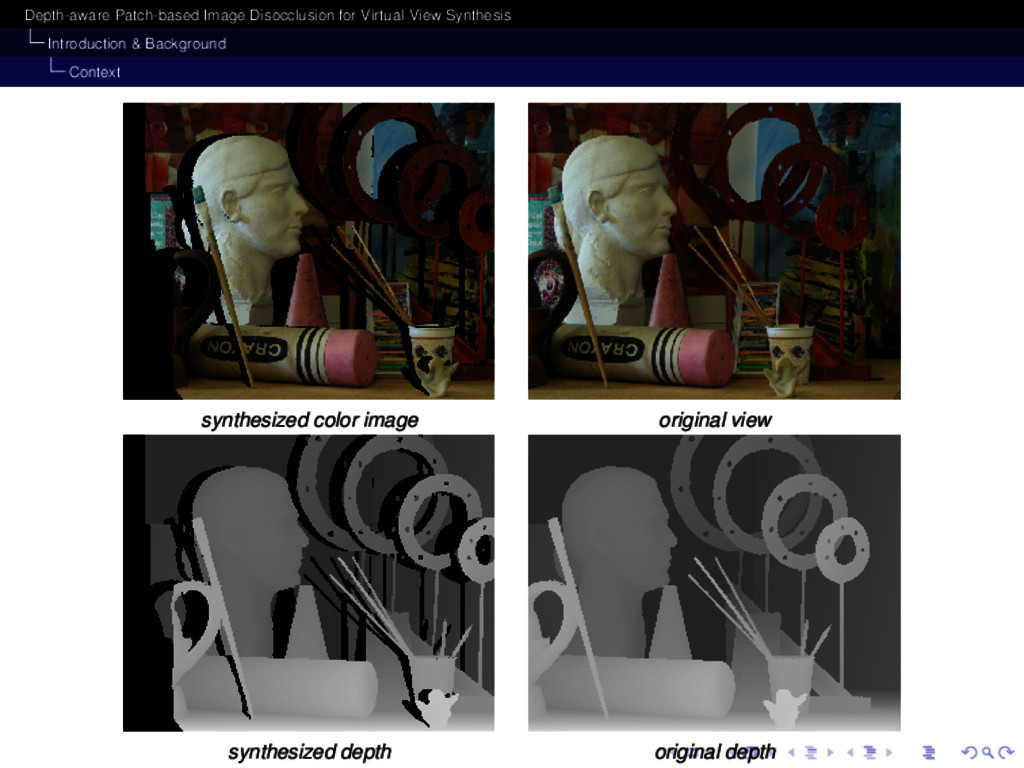
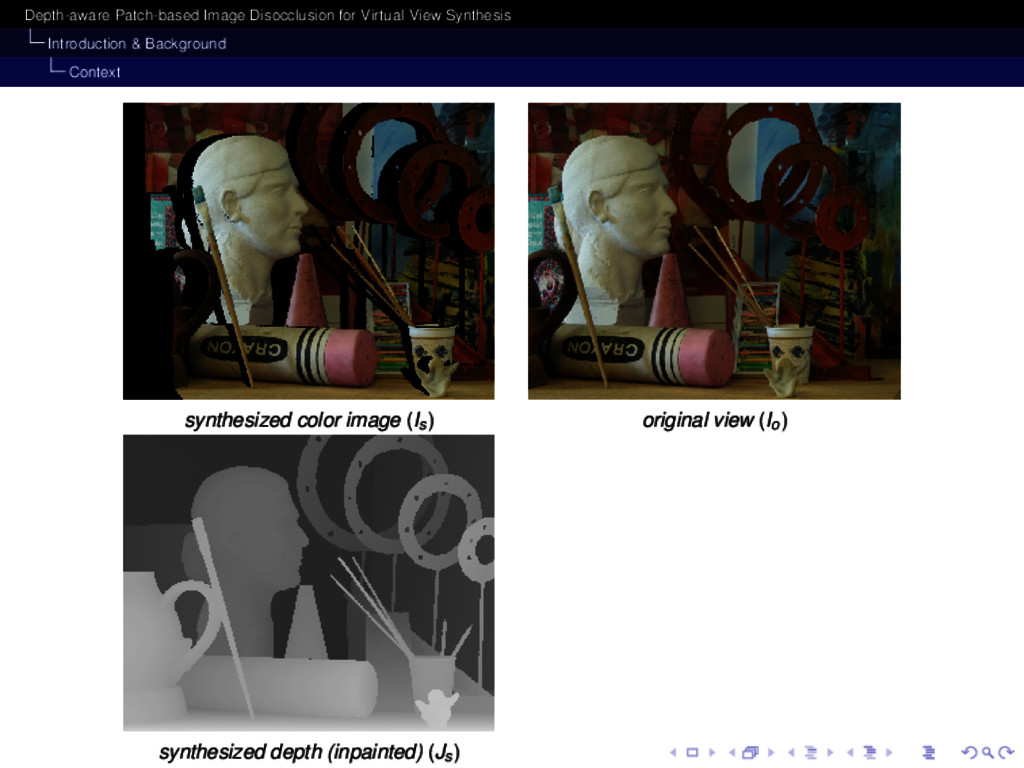
Inpainting This work • assumes that Js is already inpainted with a dedicated method (such as [*]), • adds depth information to each key step of the Criminisi et al. algorithm, • requires only one additional parameter λ. The additional parameter λ : • is a thresholding parameter, • discriminates foreground (FG) from background (BG) objects, • depends on the depth image values. λ parameter Two adjacent pixels p and q belong to the same object (FG or BG) if |depth(p)−depth(q)| < λ [*] Superpixel-based depth map inpainting for RGB-D view synthesis, ICIP, 2015.
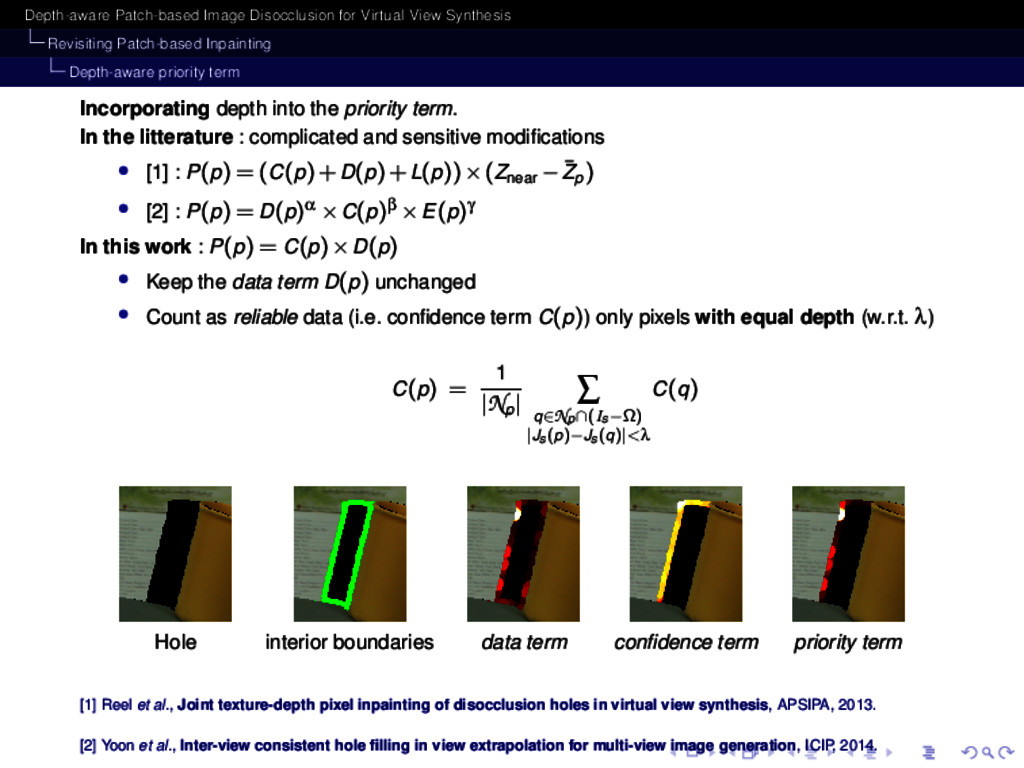
Inpainting Depth-aware priority term Incorporating depth into the priority term. In the litterature : complicated and sensitive modifications • [1] : P(p) = (C(p)+D(p)+L(p))×(Znear − ¯ Zp ) • [2] : P(p) = D(p)α ×C(p)β ×E(p)γ In this work : P(p) = C(p)×D(p) • Keep the data term D(p) unchanged • Count as reliable data (i.e. confidence term C(p)) only pixels with equal depth (w.r.t. λ) C(p) = 1 |Np | ∑ q∈Np∩(Is−Ω) |Js(p)−Js(q)|<λ C(q) Hole interior boundaries data term confidence term priority term [1] Reel et al., Joint texture-depth pixel inpainting of disocclusion holes in virtual view synthesis, APSIPA, 2013. [2] Yoon et al., Inter-view consistent hole filling in view extrapolation for multi-view image generation, ICIP, 2014.
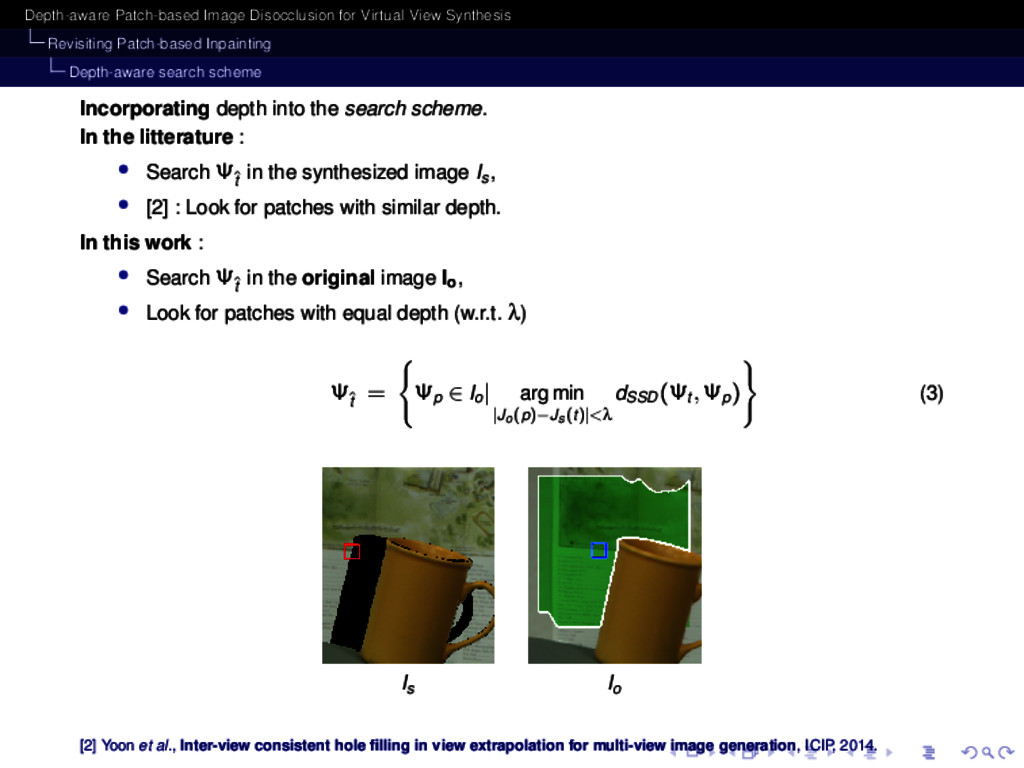
Inpainting Depth-aware search scheme Incorporating depth into the search scheme. In the litterature : • Search Ψˆ t in the synthesized image Is, • [2] : Look for patches with similar depth. In this work : • Search Ψˆ t in the original image Io, • Look for patches with equal depth (w.r.t. λ) Ψˆ t = Ψp ∈ Io | argmin |Jo(p)−Js(t)|<λ dSSD (Ψt ,Ψp ) (3) Is Io [2] Yoon et al., Inter-view consistent hole filling in view extrapolation for multi-view image generation, ICIP, 2014.
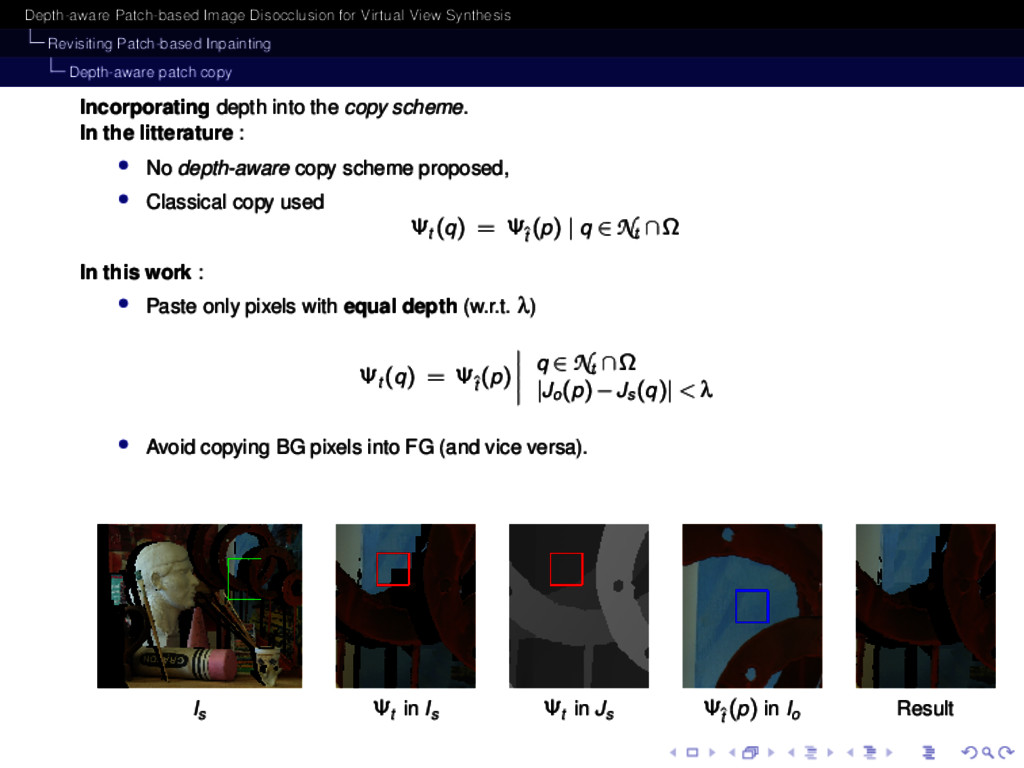
Inpainting Depth-aware patch copy Incorporating depth into the copy scheme. In the litterature : • No depth-aware copy scheme proposed, • Classical copy used Ψt (q) = Ψˆ t (p) | q ∈ Nt ∩Ω In this work : • Paste only pixels with equal depth (w.r.t. λ) Ψt (q) = Ψˆ t (p) q ∈ Nt ∩Ω |Jo (p)−Js (q)| < λ • Avoid copying BG pixels into FG (and vice versa). Is Ψt in Is Ψt in Js Ψˆ t (p) in Io Result
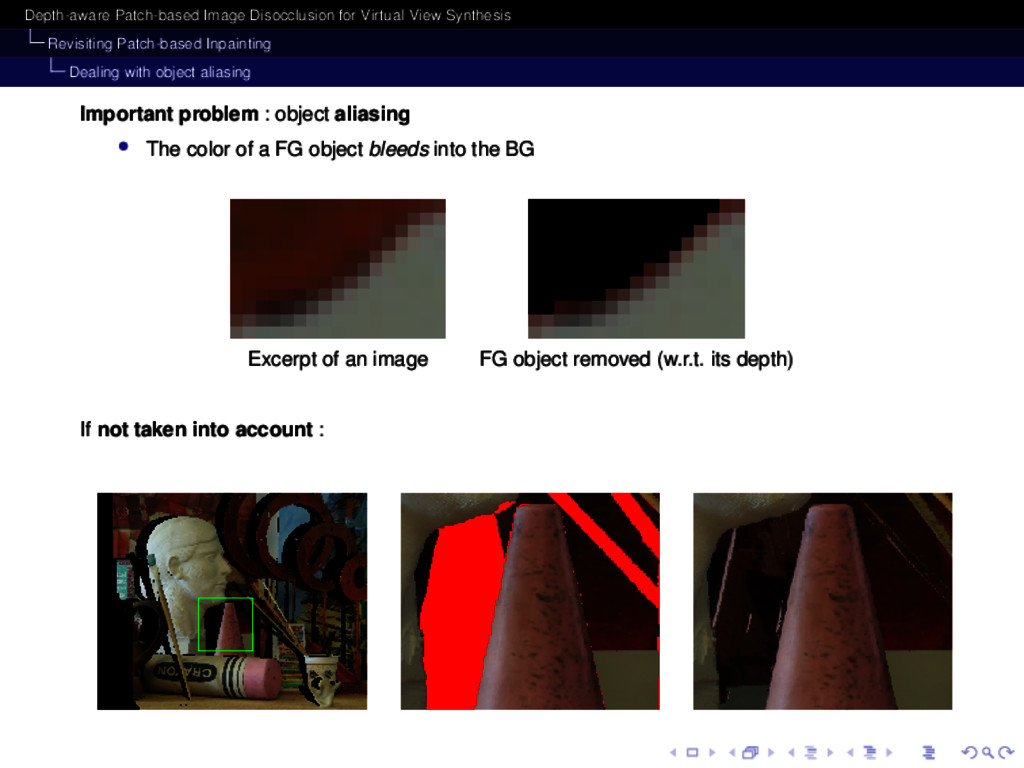
Inpainting Dealing with object aliasing Important problem : object aliasing • The color of a FG object bleeds into the BG Excerpt of an image FG object removed (w.r.t. its depth) If not taken into account :
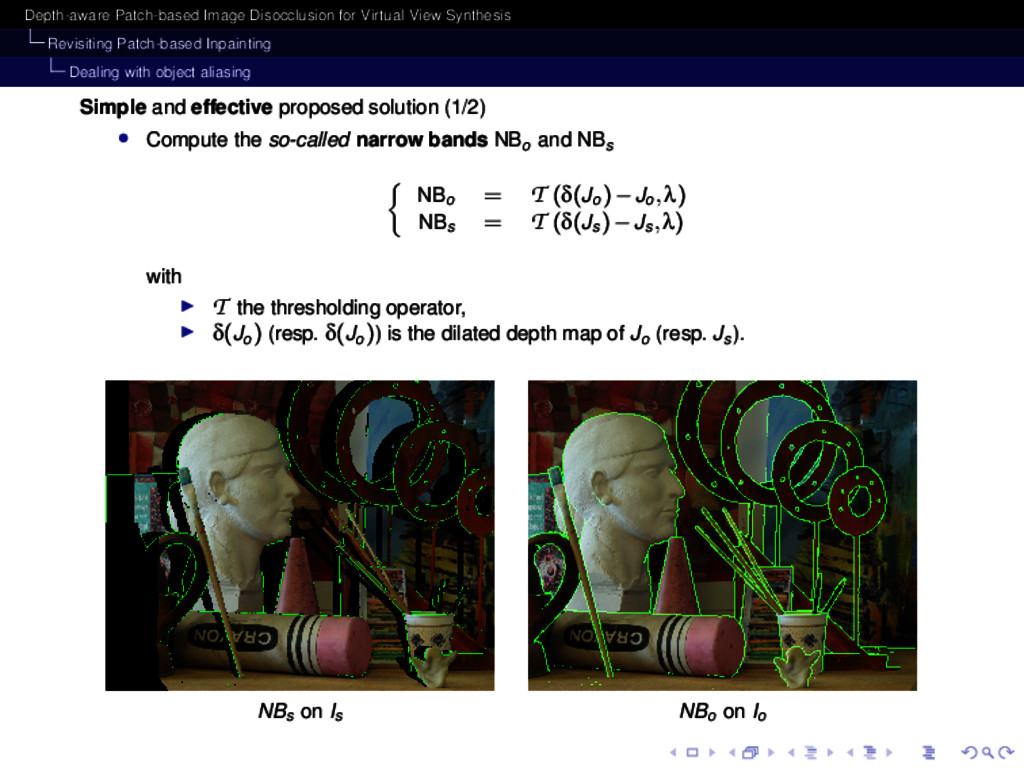
Inpainting Dealing with object aliasing Simple and effective proposed solution (1/2) • Compute the so-called narrow bands NBo and NBs NBo = T (δ(Jo )−Jo ,λ) NBs = T (δ(Js )−Js ,λ) with T the thresholding operator, δ(Jo ) (resp. δ(Jo )) is the dilated depth map of Jo (resp. Js). NBs on Is NBo on Io
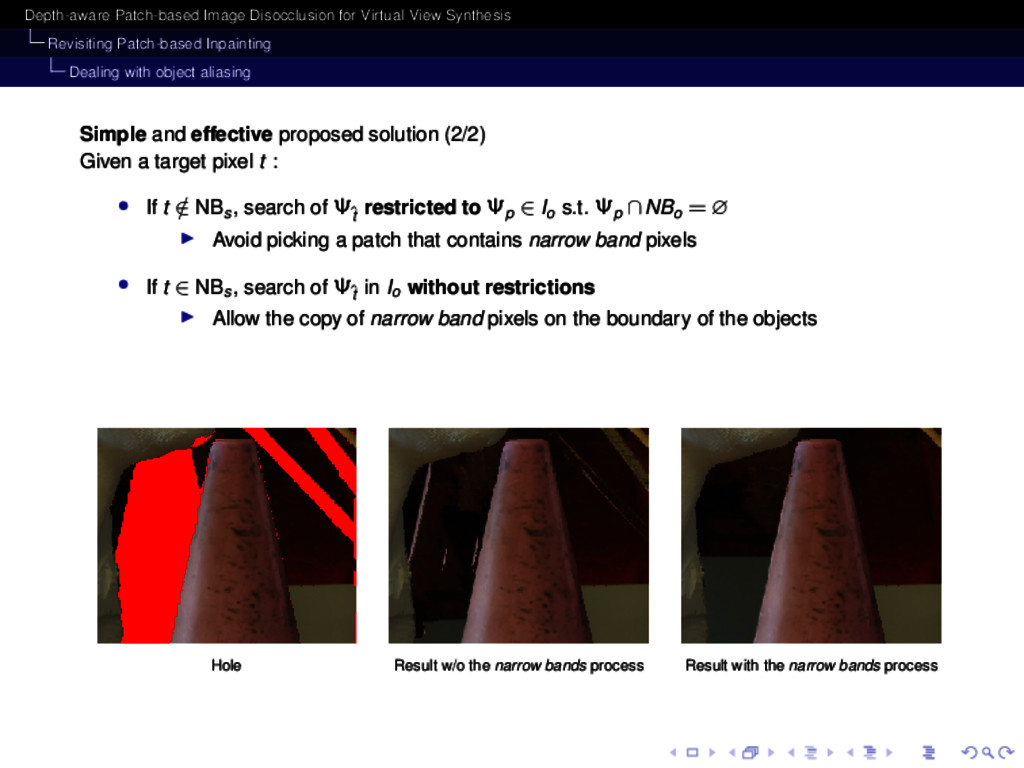
Inpainting Dealing with object aliasing Simple and effective proposed solution (2/2) Given a target pixel t : • If t / ∈ NBs, search of Ψˆ t restricted to Ψp ∈ Io s.t. Ψp ∩NBo = ∅ Avoid picking a patch that contains narrow band pixels • If t ∈ NBs, search of Ψˆ t in Io without restrictions Allow the copy of narrow band pixels on the boundary of the objects Hole Result w/o the narrow bands process Result with the narrow bands process
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}