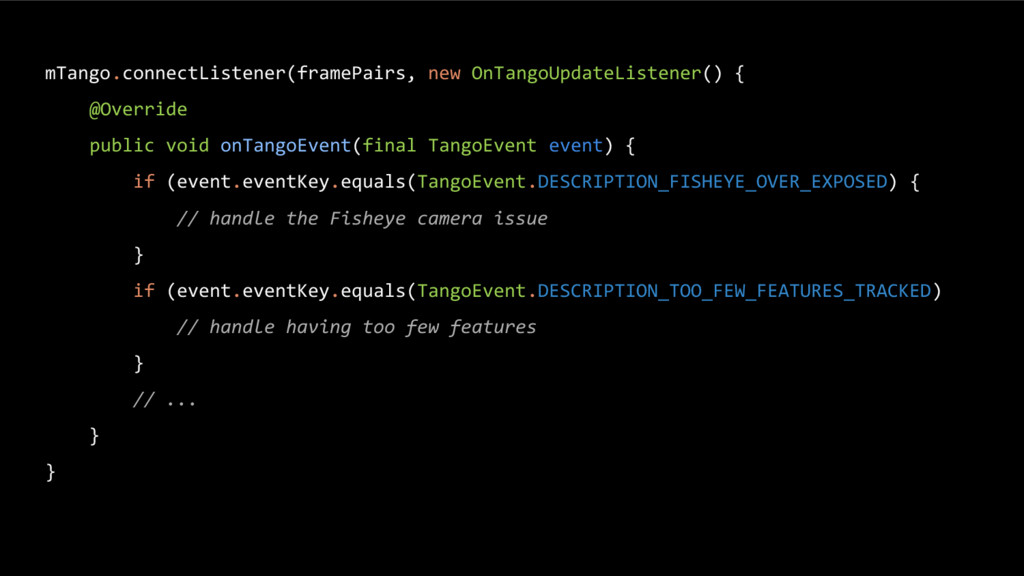
{ if (event.eventKey.equals(TangoEvent.DESCRIPTION_FISHEYE_OVER_EXPOSED) { // handle the Fisheye camera issue } if (event.eventKey.equals(TangoEvent.DESCRIPTION_TOO_FEW_FEATURES_TRACKED) // handle having too few features } // ... } }
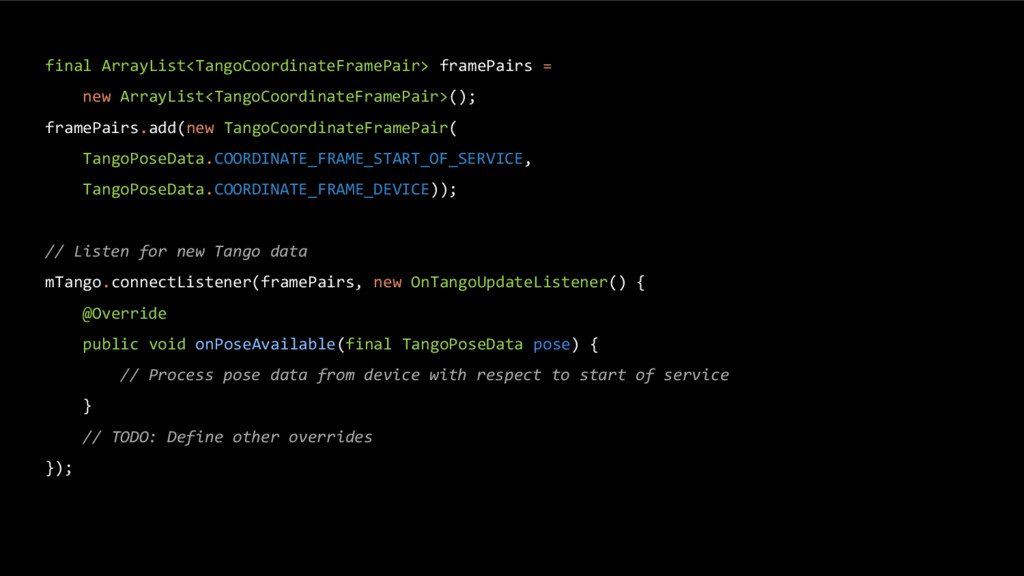
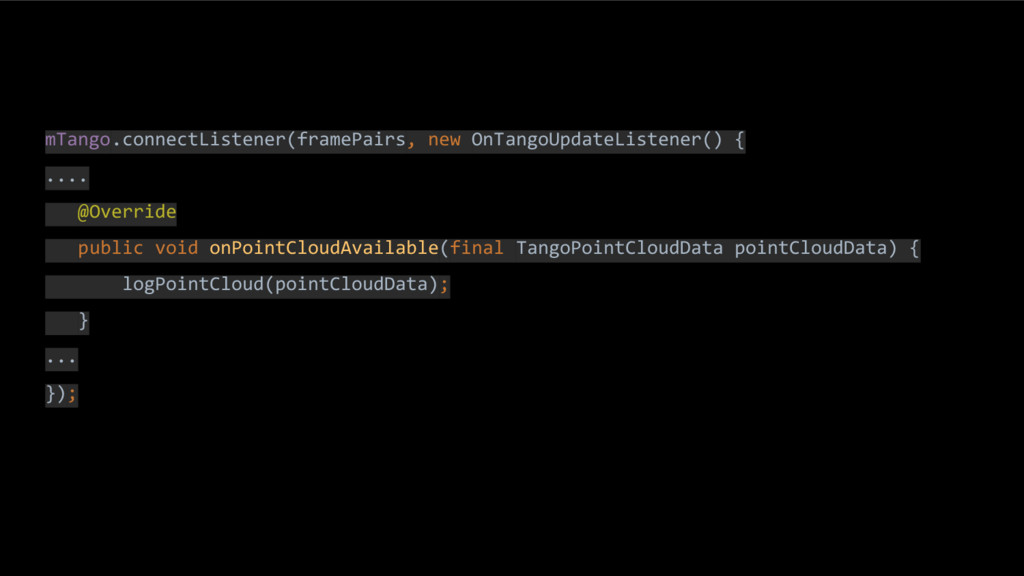
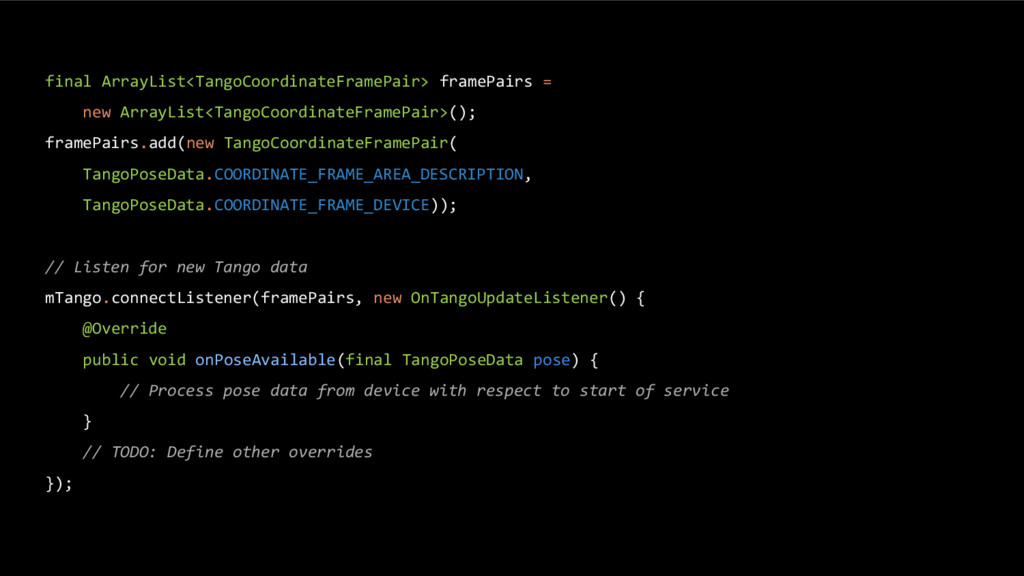
// Listen for new Tango data mTango.connectListener(framePairs, new OnTangoUpdateListener() { @Override public void onPoseAvailable(final TangoPoseData pose) { // Process pose data from device with respect to start of service } // TODO: Define other overrides });
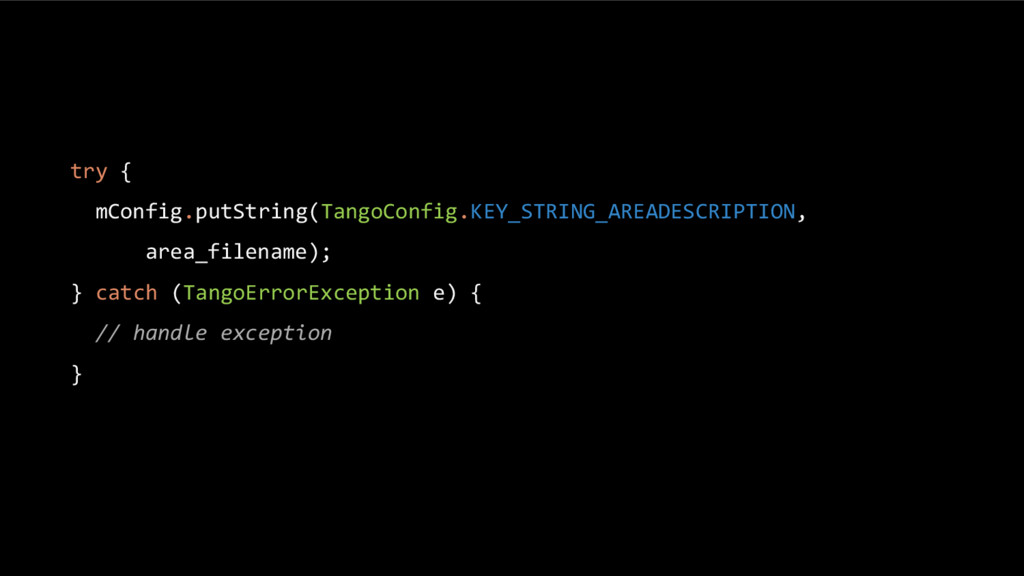
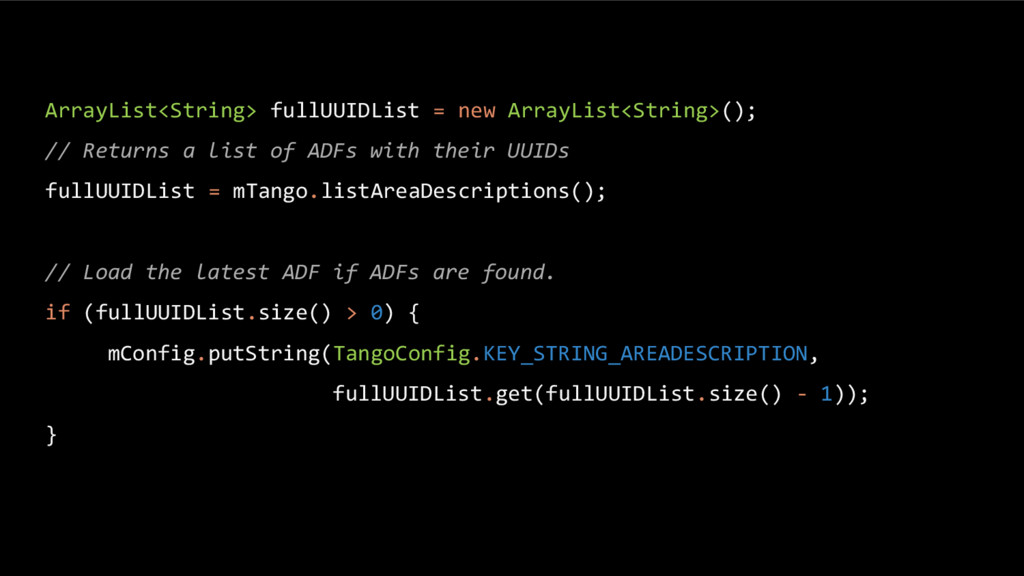
ADFs with their UUIDs fullUUIDList = mTango.listAreaDescriptions(); // Load the latest ADF if ADFs are found. if (fullUUIDList.size() > 0) { mConfig.putString(TangoConfig.KEY_STRING_AREADESCRIPTION, fullUUIDList.get(fullUUIDList.size() - 1)); }
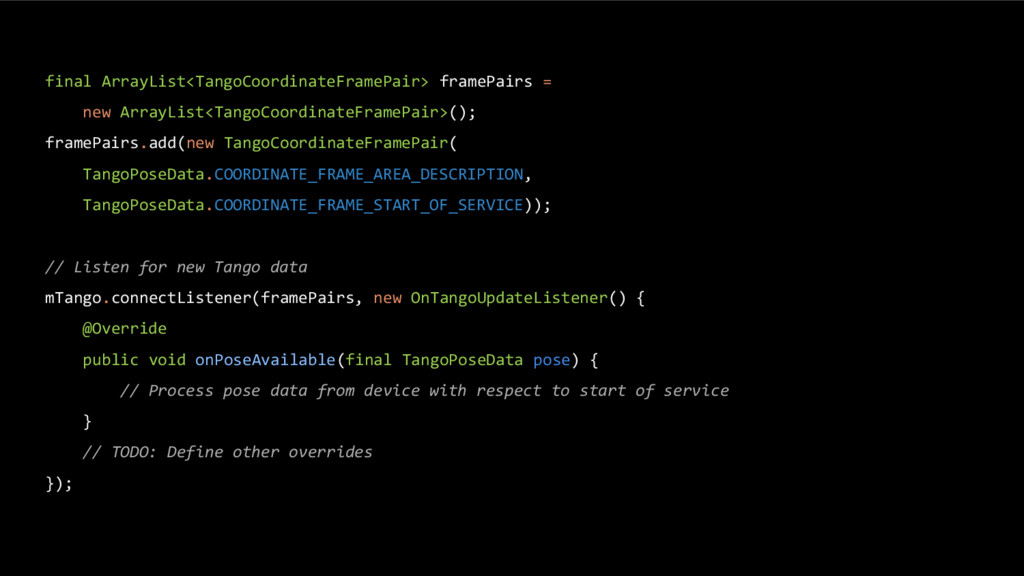
// Listen for new Tango data mTango.connectListener(framePairs, new OnTangoUpdateListener() { @Override public void onPoseAvailable(final TangoPoseData pose) { // Process pose data from device with respect to start of service } // TODO: Define other overrides });
// Listen for new Tango data mTango.connectListener(framePairs, new OnTangoUpdateListener() { @Override public void onPoseAvailable(final TangoPoseData pose) { // Process pose data from device with respect to start of service } // TODO: Define other overrides });
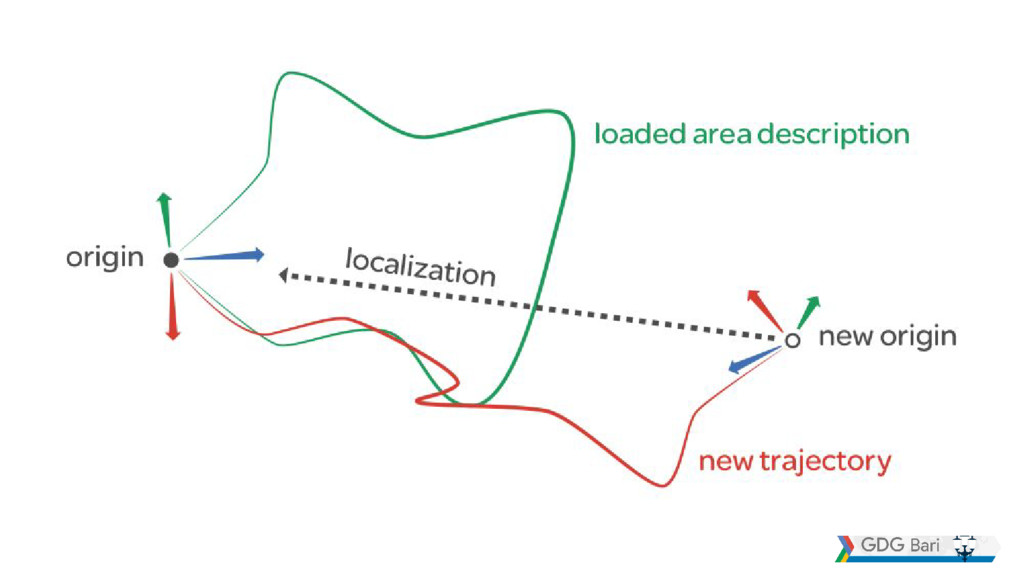
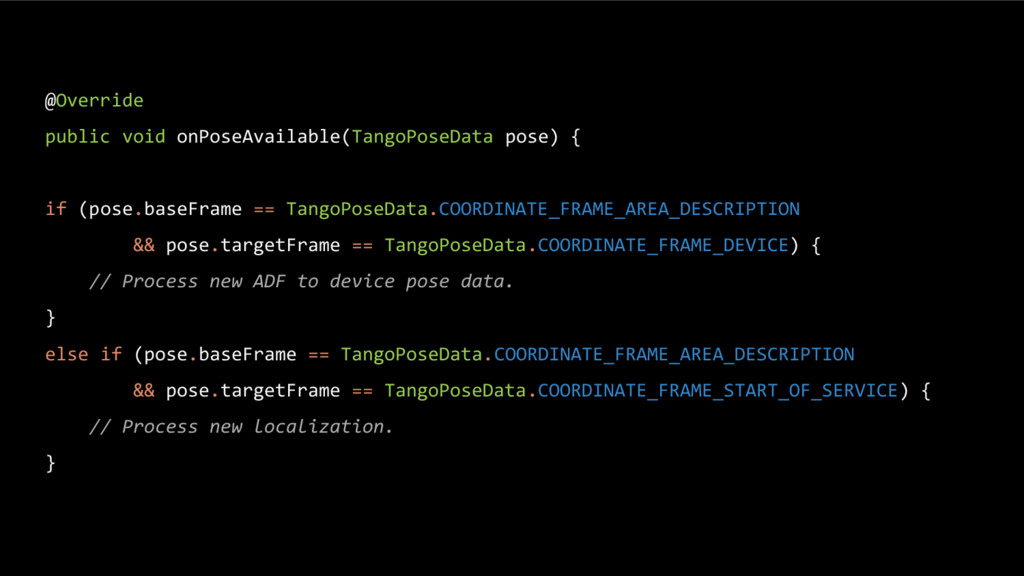
&& pose.targetFrame == TangoPoseData.COORDINATE_FRAME_DEVICE) { // Process new ADF to device pose data. } else if (pose.baseFrame == TangoPoseData.COORDINATE_FRAME_AREA_DESCRIPTION && pose.targetFrame == TangoPoseData.COORDINATE_FRAME_START_OF_SERVICE) { // Process new localization. }
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Twitter: @mik3lantoniO Facebook: mikelantonio Mail: [email protected] Google+: +MichelantonioTrizio Github: mikelantonio](https://files.speakerdeck.com/presentations/6922bd98ddc84fa8af61b1d66b909b4a/slide_48.jpg){kind=link}
{kind=link}