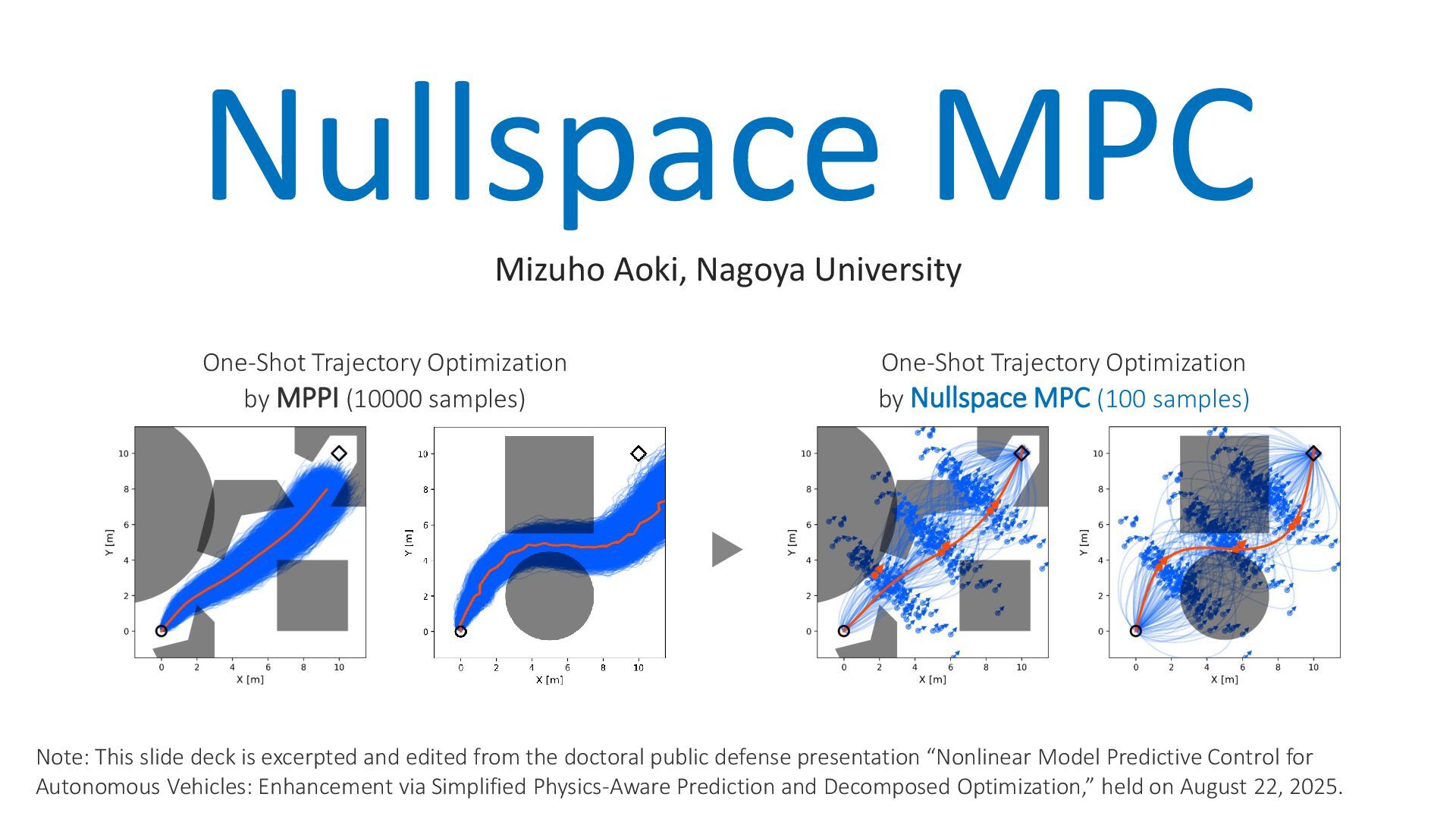
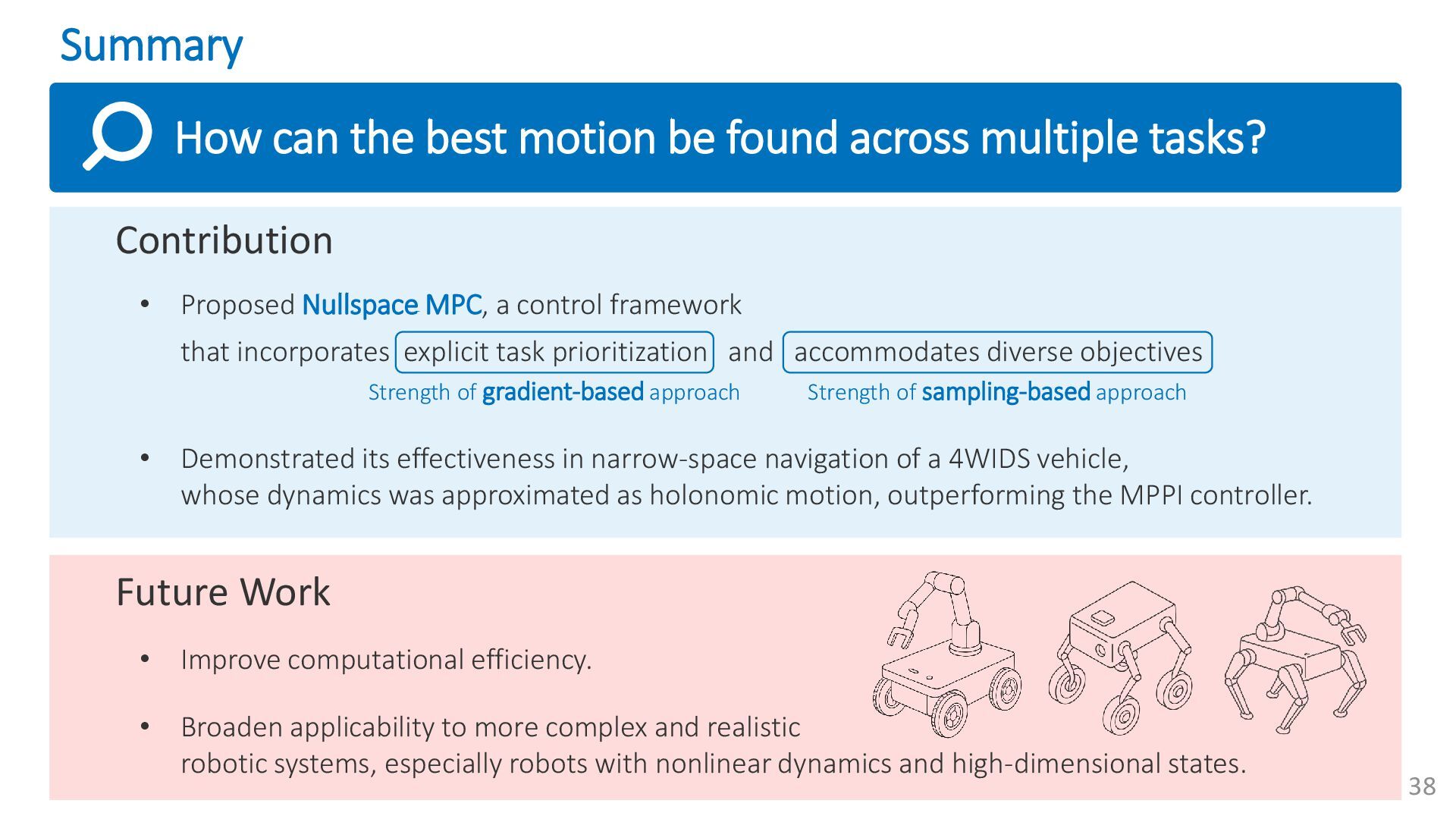
Explanation of Nullspace MPC, a novel control framework that incorporates explicit task prioritization and accommodates diverse objectives. Demonstrated its effectiveness in narrow-space navigation of a swerve drive robot.
Project website: mizuhoaoki.github.io/projects/nullspace_mpc
Open-source code: github.com/MizuhoAOKI/nullspace_mpc
{kind=link}
![Background: Diversifying Mobility Designs 2 Reference [1] https://lexus.jp/models/?padid=from_not_ljptop_footer_carlineup [2] https://www.youtube.com/watch?v=QC6Q4Fge3uE](https://files.speakerdeck.com/presentations/ab33a9997ad343cc8f14c0be9ad0e721/slide_1.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
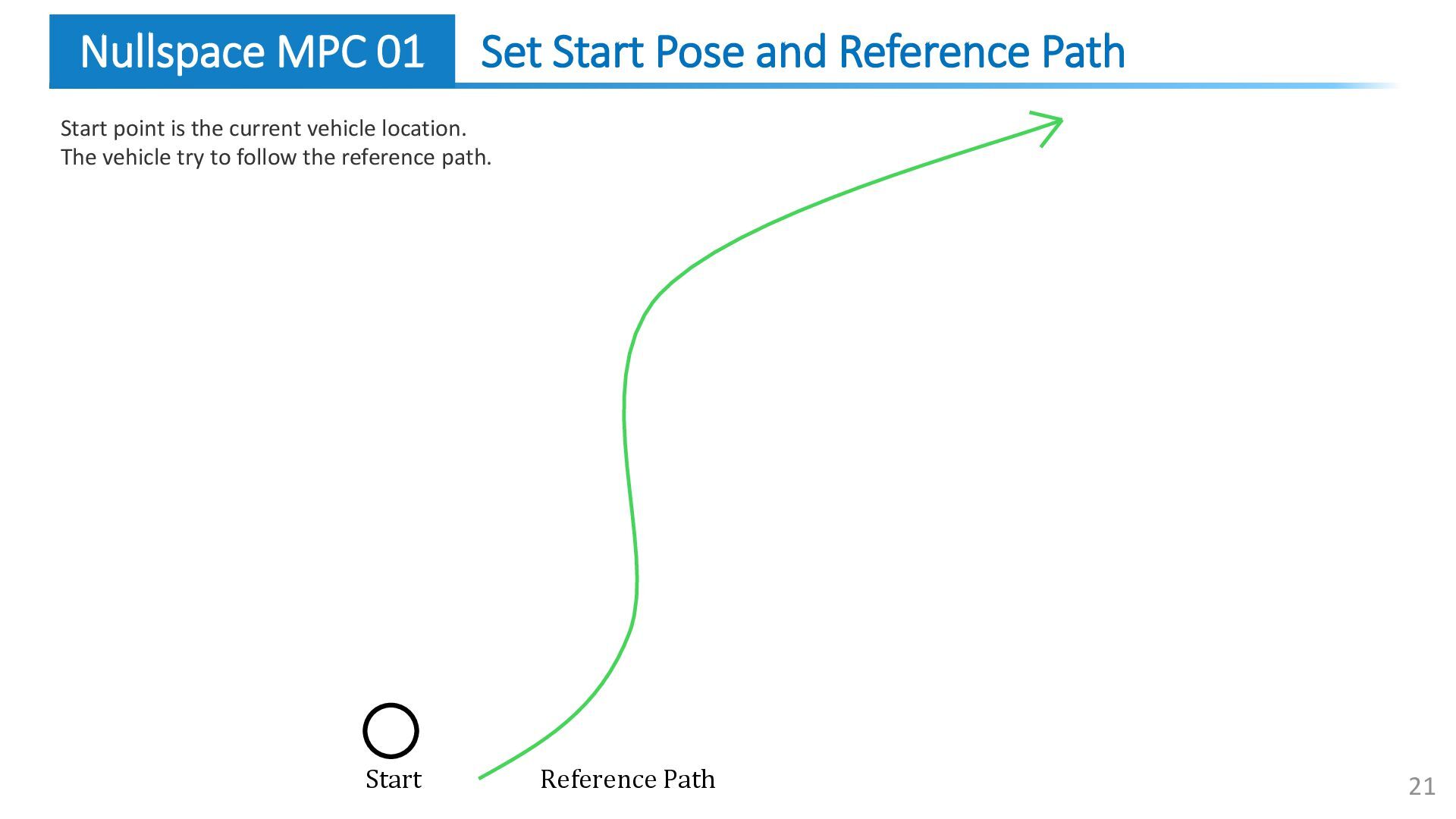
![22 Start Local Goal Reference Path L [m] Set Local](https://files.speakerdeck.com/presentations/ab33a9997ad343cc8f14c0be9ad0e721/slide_21.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}