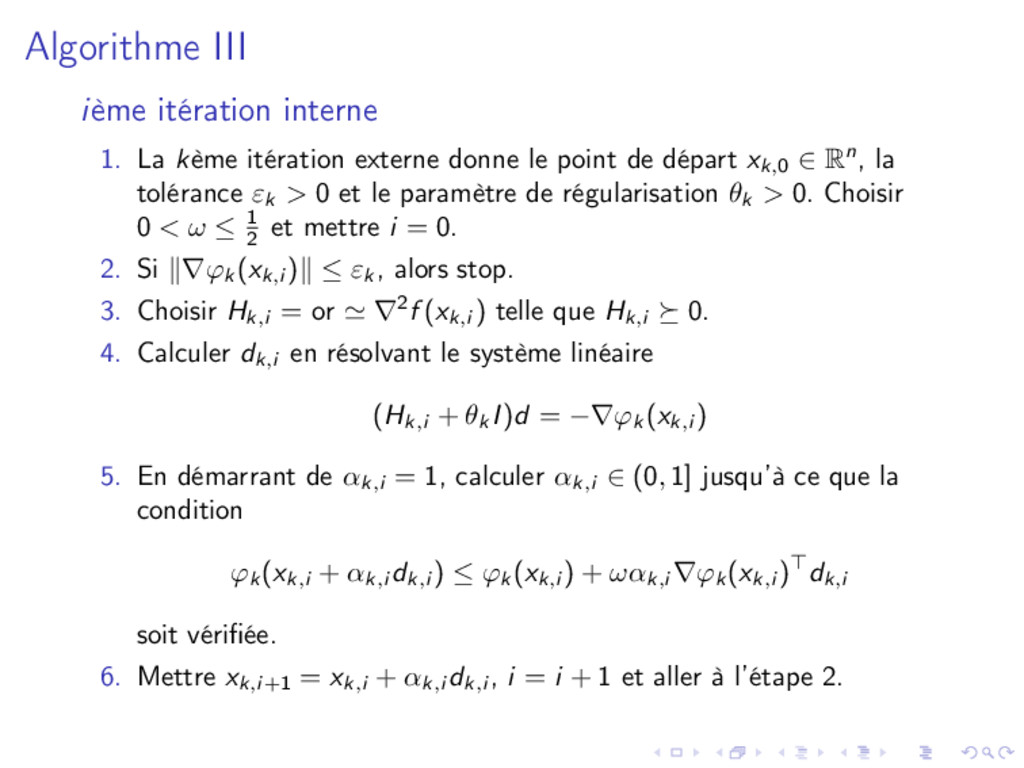
donne le point de départ xk,0 ∈ Rn, la tolérance εk > 0 et le paramètre de régularisation θk > 0. Choisir 0 < ω ≤ 1 2 et mettre i = 0. 2. Si ∇ϕk (xk,i ) ≤ εk , alors stop. 3. Choisir Hk,i = or ∇2f (xk,i ) telle que Hk,i 0. 4. Calculer dk,i en résolvant le système linéaire (Hk,i + θk I)d = −∇ϕk (xk,i ) 5. En démarrant de αk,i = 1, calculer αk,i ∈ (0, 1] jusqu’à ce que la condition ϕk (xk,i + αk,i dk,i ) ≤ ϕk (xk,i ) + ωαk,i ∇ϕk (xk,i ) dk,i soit vérifiée. 6. Mettre xk,i+1 = xk,i + αk,i dk,i , i = i + 1 et aller à l’étape 2.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}