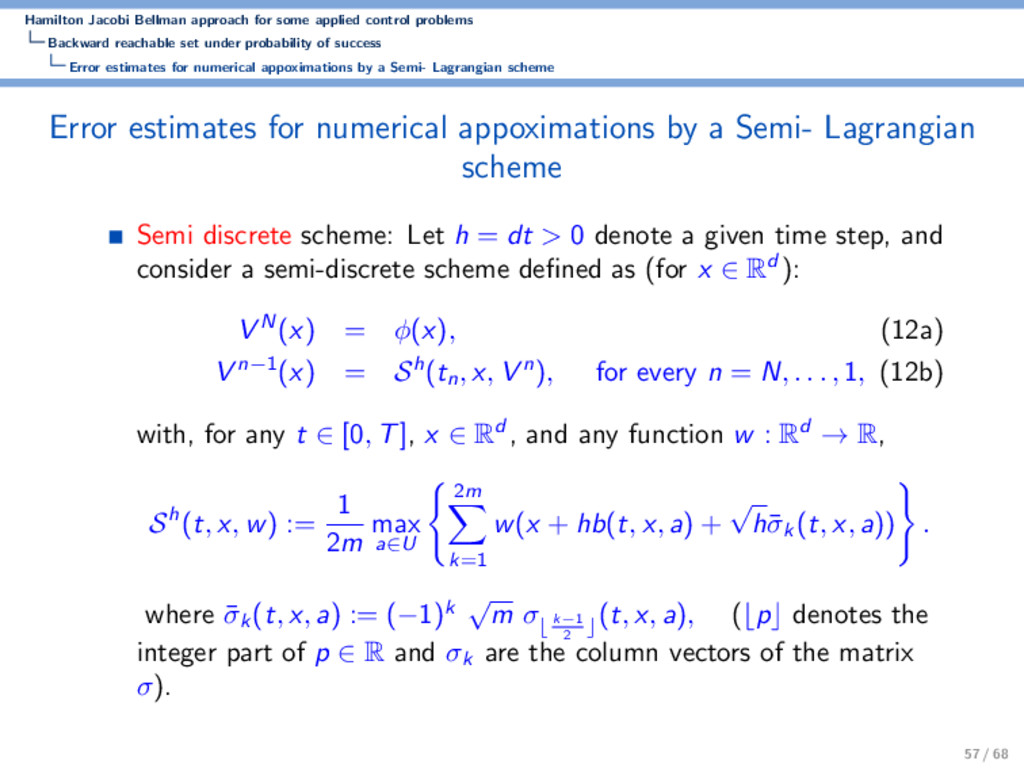
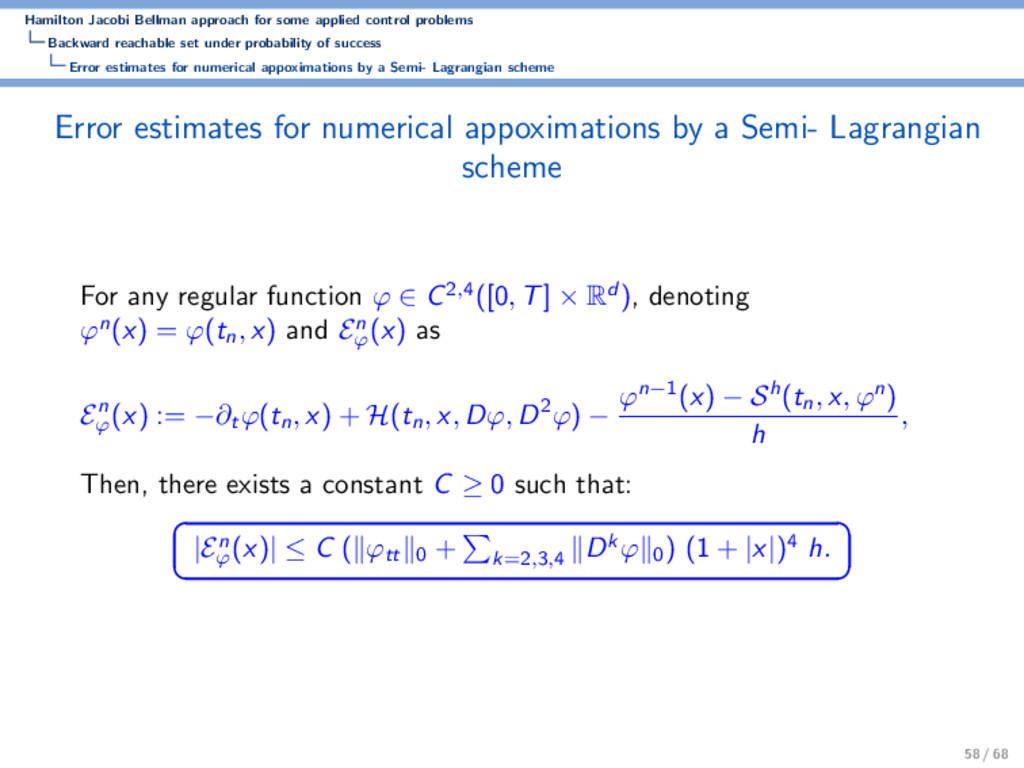
reachable set under probability of success Error estimates for numerical appoximations by a Semi- Lagrangian scheme Error estimates for numerical appoximations by a Semi- Lagrangian scheme Theorem Let φ is Lipschitz continuous function with Lipschitz constant Lφ. There exists C ≥ 0, ∀n ∈ [0, . . . , N], |V n(x) − v(tn, x)| ≤ CLφ (1 + |x|)7/4 h1/4. Elements of the proof: Let (Qn, Qn+1, . . . , Qk , . . . ) be a sequence of i.i.d. random variables such that P[Qi = k] = 1 2m for all i ≥ n and k ≥ n. For a given x ∈ Rd , a given k ≥ n ≥ 0, a sequence of controls a = (an, . . . , ak , . . . ) with ai ∈ U, - If k = n, Zn,a n,x := x. - If k ≥ n, Zk+1,a n,x := Zk,a n,x + hb(tk , Zk,a n,x , ak ) + √ h¯ σQk (tk , Zk,a n,x , ak ). 59 / 68
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}