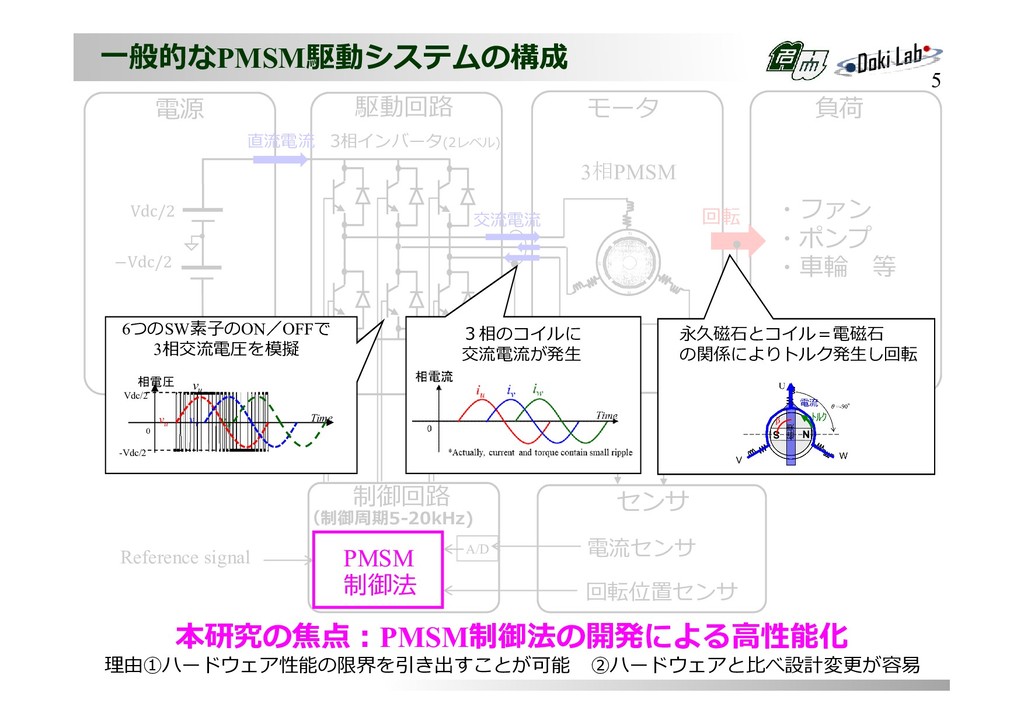
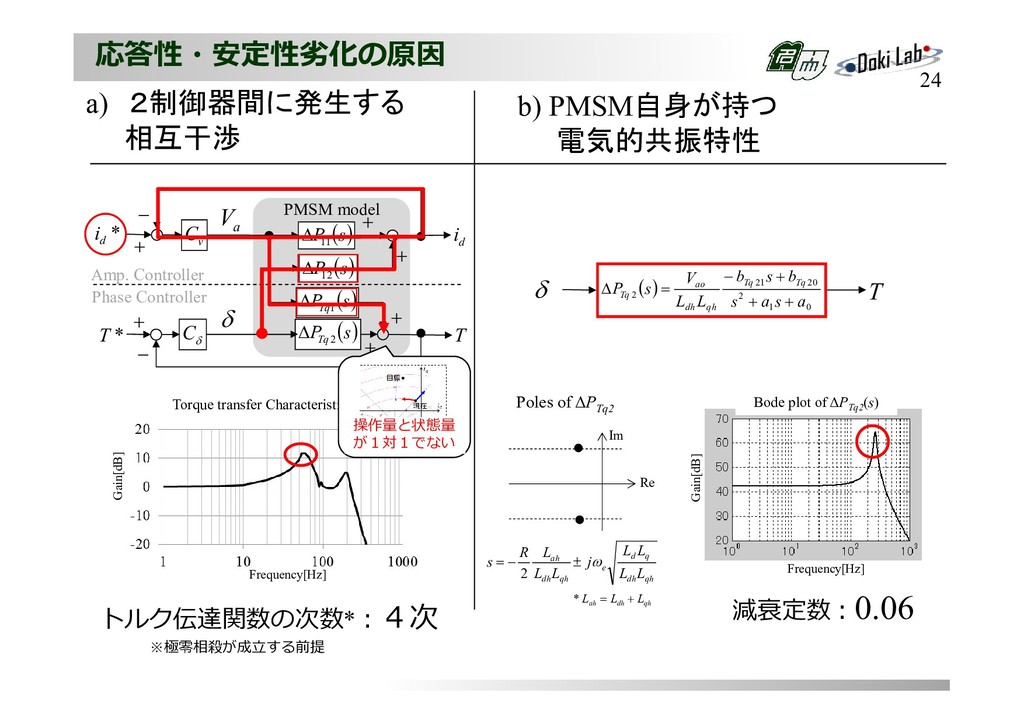
qh dh q d e qh dh ah L L L L j L L L R s 2 Poles of ΔPTq2 Gain[dB] Frequency[Hz] Bode plot of ΔPTq2 (s) T 0 1 2 20 21 2 a s a s b s b L L V s P Tq Tq qh dh ao Tq qh dh ah L L L * PMSM model d i T C s P 11 s P Tq2 s P 12 s P Tq1 * T * d i a V v C Amp. Controller Phase Controller Gain[dB] Frequency[Hz] Torque transfer Characteristic (T/T*) トルク伝達関数の次数*:4次 減衰定数:0.06 ※極零相殺が成立する前提 操作量と状態量 が1対1でない
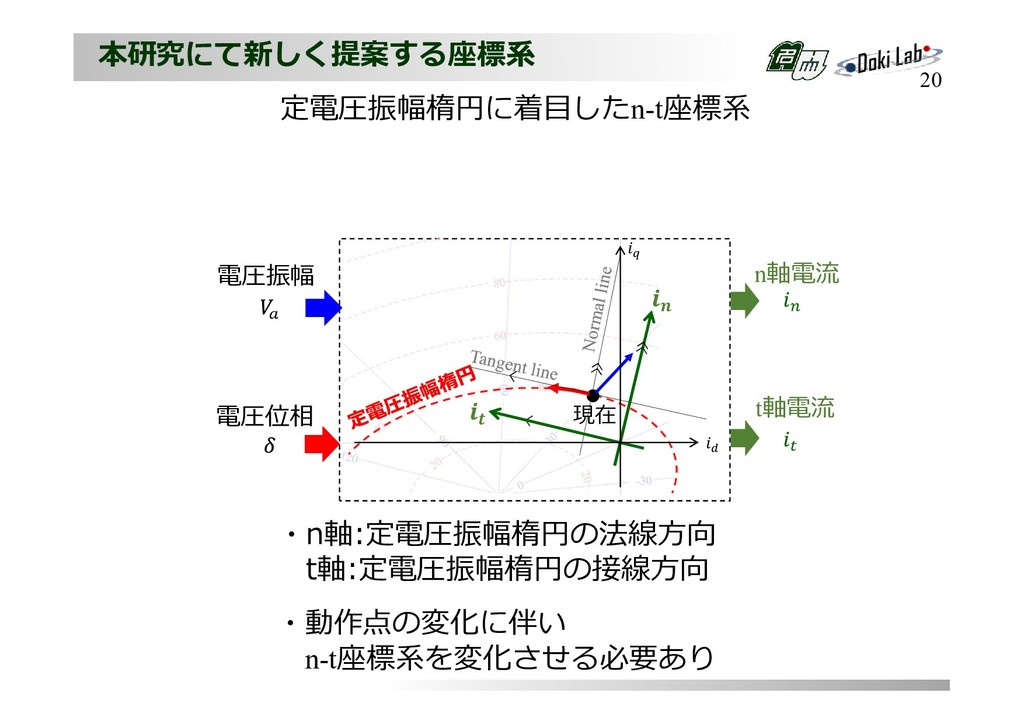
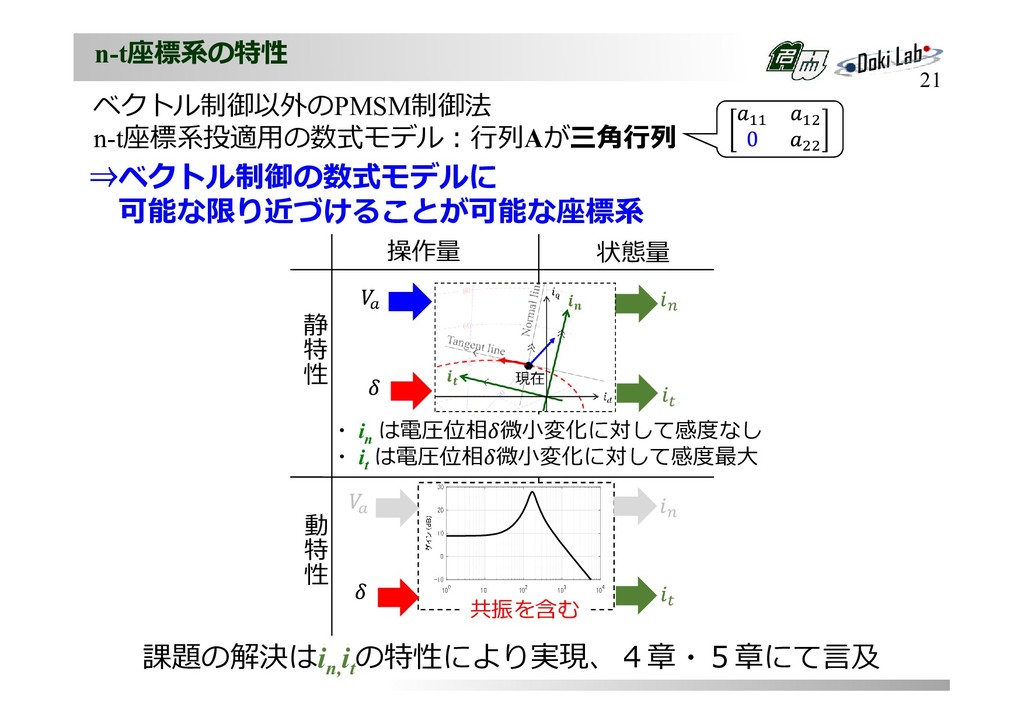
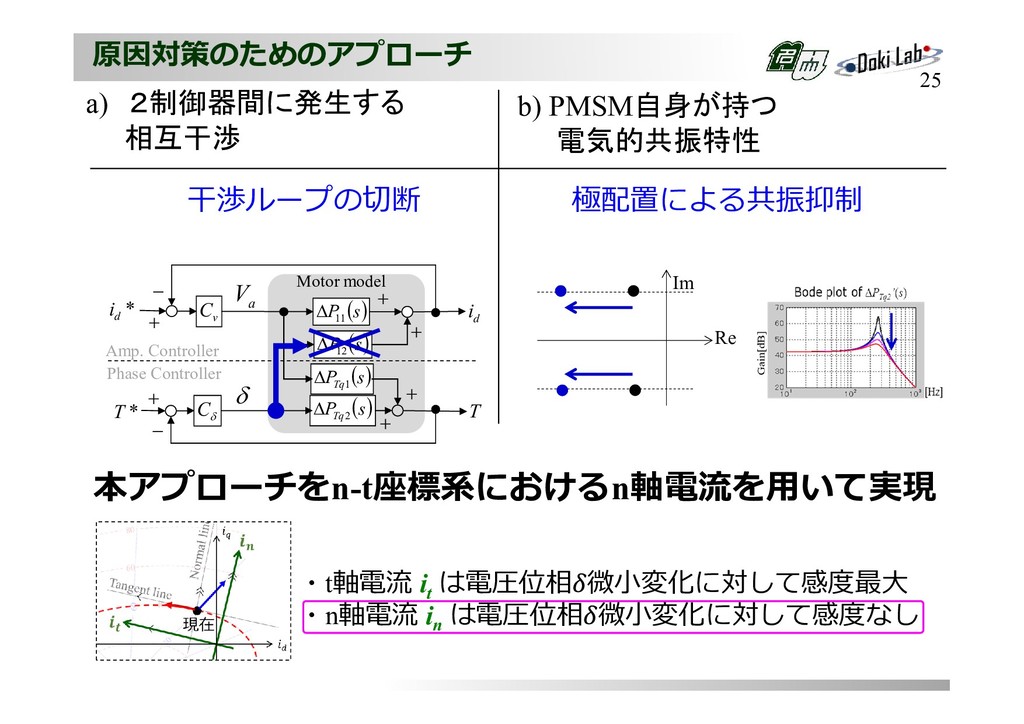
C s P 11 s P Tq2 s P 12 s P Tq1 * T * d i a V v C Amp. Controller Phase Controller 干渉ループの切断 b) PMSM自身が持つ 電気的共振特性 a) 2制御器間に発生する 相互干渉 極配置による共振抑制 ・t軸電流 it は電圧位相 微小変化に対して感度最大 ・n軸電流 in は電圧位相 微小変化に対して感度なし 本アプローチをn-t座標系におけるn軸電流を用いて実現
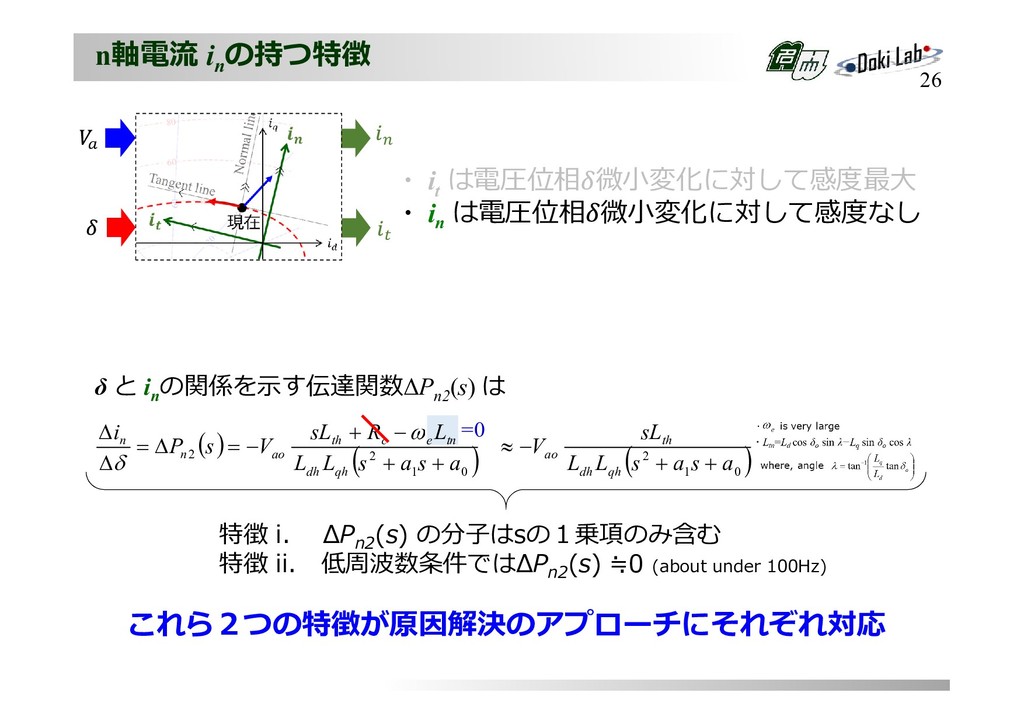
0 1 2 0 1 2 2 a s a s L L sL V a s a s L L L R sL V s P i qh dh th ao qh dh tn e c th ao n n n軸電流 in の持つ特徴 これら2つの特徴が原因解決のアプローチにそれぞれ対応 ・ it は電圧位相 微小変化に対して感度最大 ・ in は電圧位相 微小変化に対して感度なし 特徴 i. ΔPn2 (s) の分子はsの1乗項のみ含む 特徴 ii. 低周波数条件ではΔPn2 (s) ≒0 (about under 100Hz)
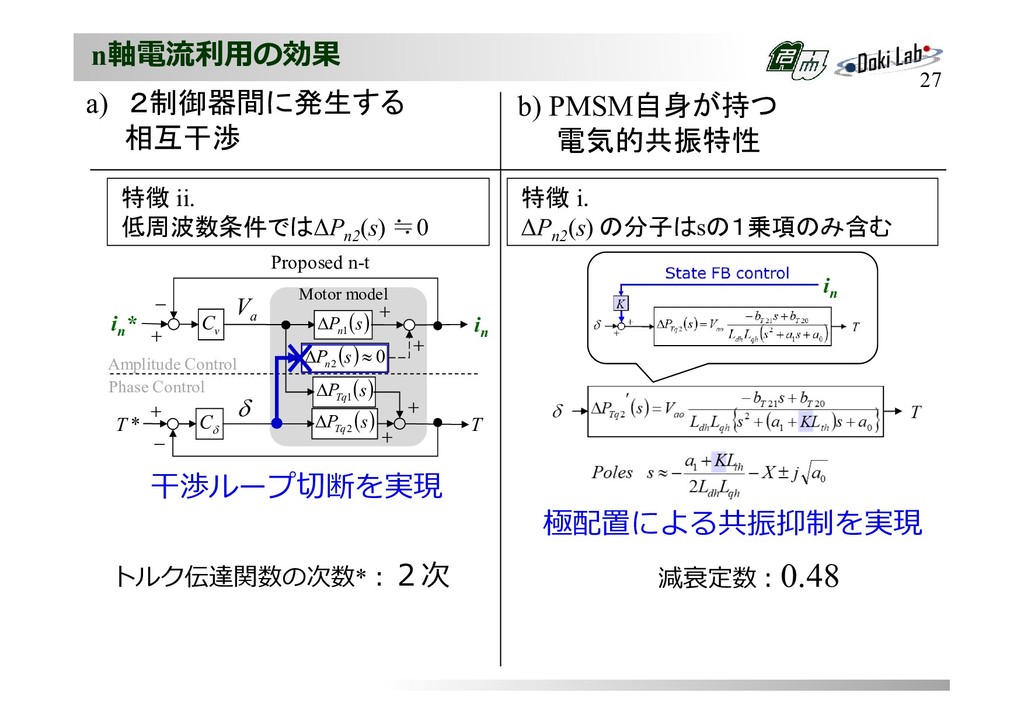
i T C s P n1 s P Tq2 0 2 s P n s P Tq1 * T * n i a V v C Amplitude Control Phase Control Proposed n-t 特徴 ii. 低周波数条件ではΔPn2 (s) ≒0 in in * in b) PMSM自身が持つ 電気的共振特性 a) 2制御器間に発生する 相互干渉 干渉ループ切断を実現 極配置による共振抑制を実現 トルク伝達関数の次数*:2次 減衰定数:0.48
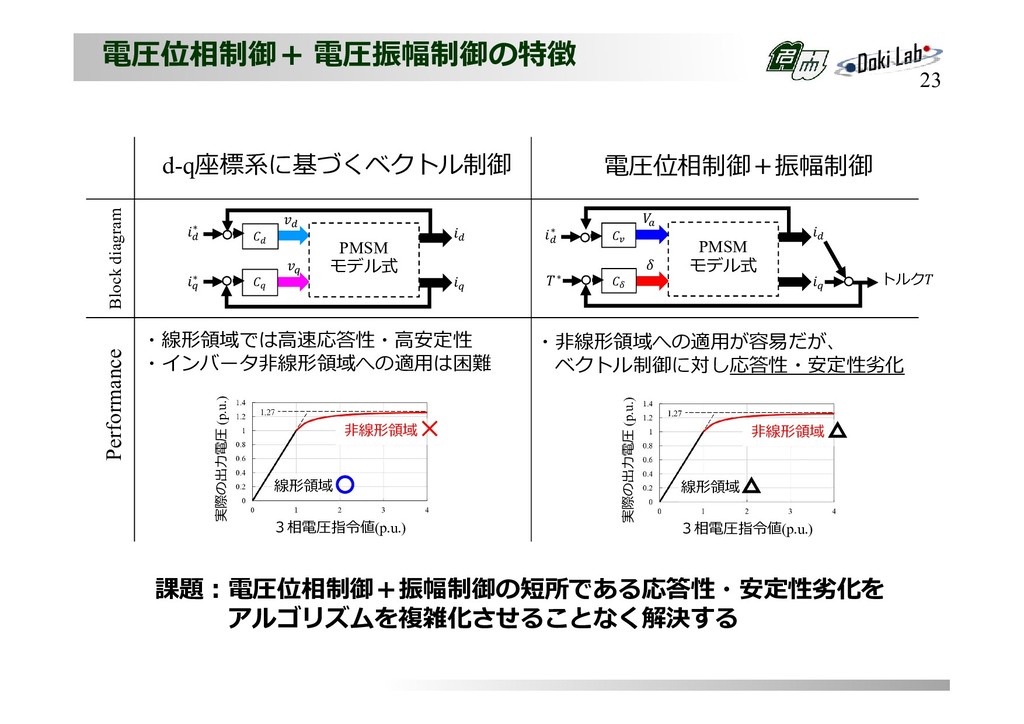
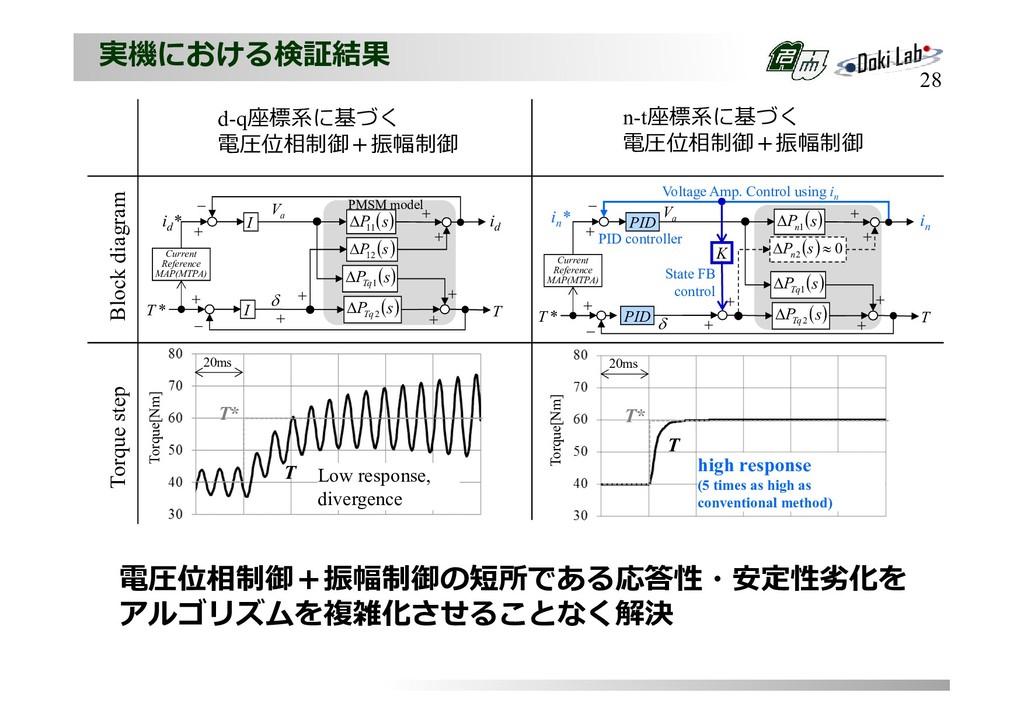
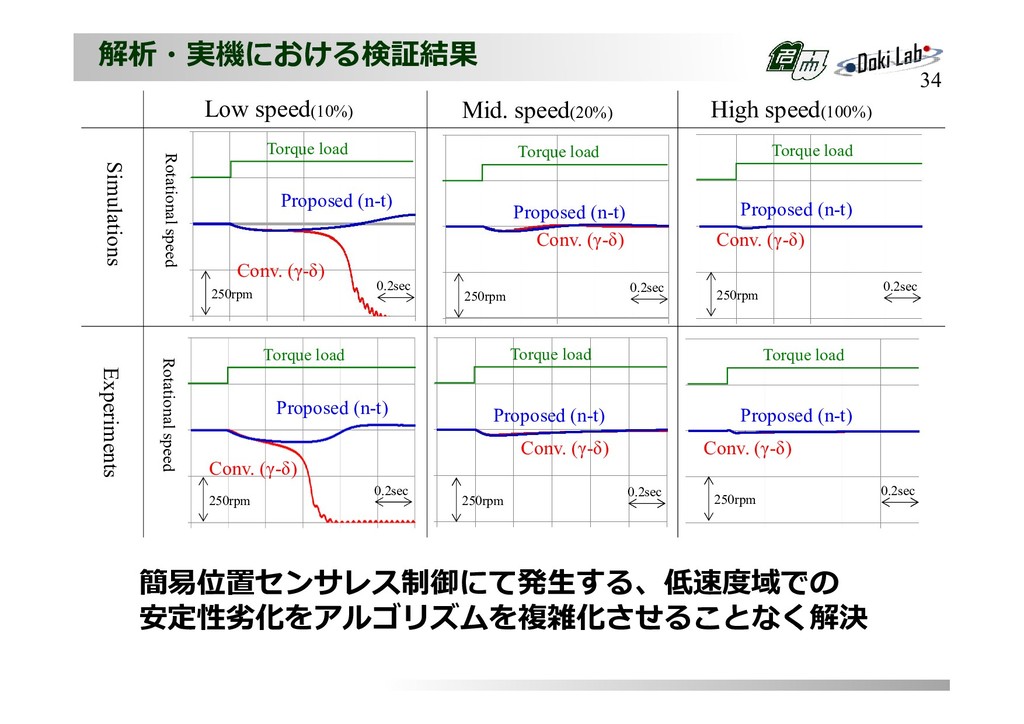
s P Tq2 a V PID s P Tq1 * T 0 2 s P n Current Reference MAP(MTPA) K d-q座標系に基づく 電圧位相制御+振幅制御 in in * s P 11 I T s P Tq2 a V I s P Tq1 * T s P 12 Current Reference MAP(MTPA) id id * PID controller State FB control Voltage Amp. Control using in Block diagram Torque step Low response, divergence Torque[Nm] 20ms T* T high response (5 times as high as conventional method) 20ms Torque[Nm] T* T n-t座標系に基づく 電圧位相制御+振幅制御 電圧位相制御+振幅制御の短所である応答性・安定性劣化を アルゴリズムを複雑化させることなく解決 PMSM model
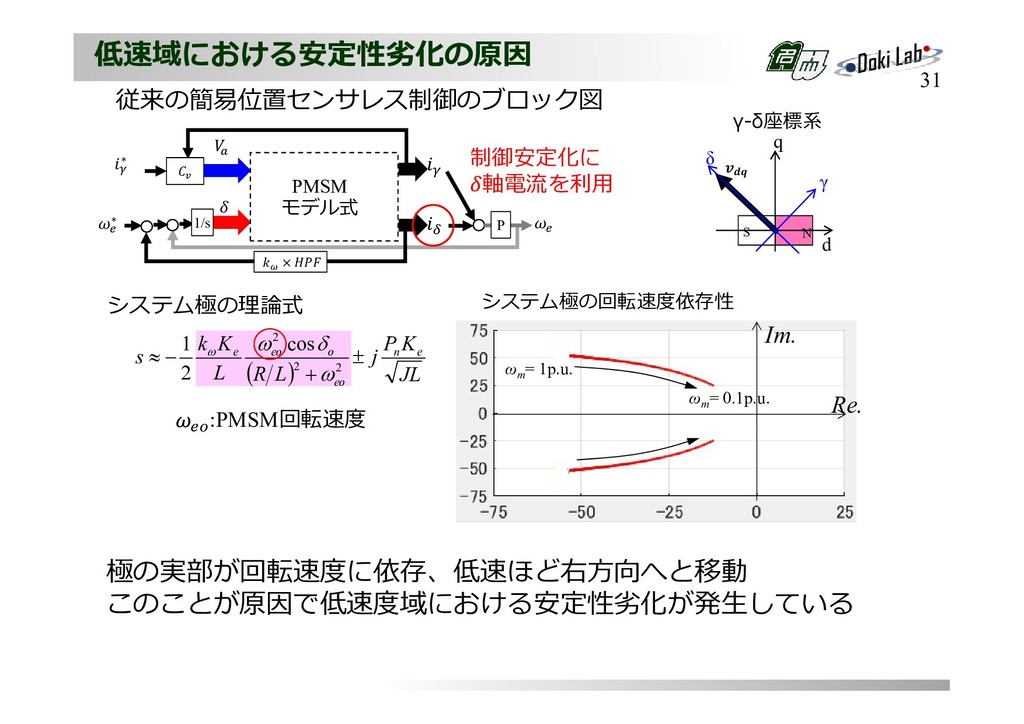
0.1p.u. JL K P j L R L K k s e n eo o eo e 2 2 2 cos 2 1 システム極の理論式 従来の簡易位置センサレス制御のブロック図 制御安定化に 軸電流を利用 極の実部が回転速度に依存、低速ほど右方向へと移動 このことが原因で低速度域における安定性劣化が発生している :PMSM回転速度 d q N S γ δ γ-δ座標系 PMSM モデル式 ∗ ∗ × 1/s P
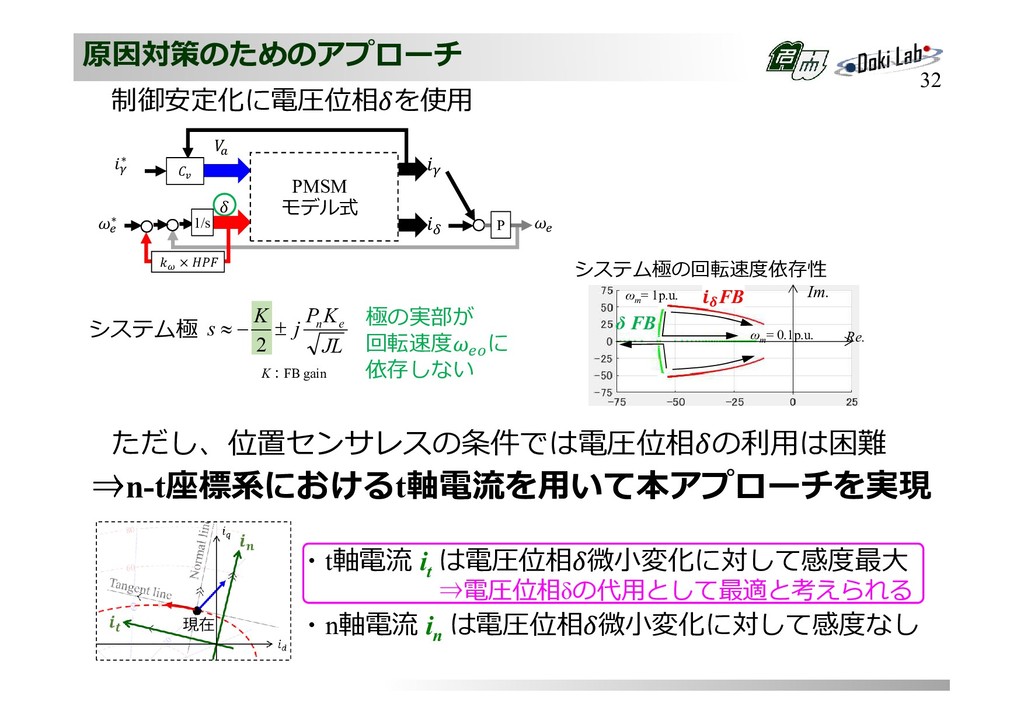
FB 原因対策のためのアプローチ JL K P j K s e n 2 Im. K:FB gain 制御安定化に電圧位相 を使用 極の実部が 回転速度 に 依存しない システム極 システム極の回転速度依存性 ただし、位置センサレスの条件では電圧位相 の利用は困難 ・t軸電流 it は電圧位相 微小変化に対して感度最大 ・n軸電流 in は電圧位相 微小変化に対して感度なし ⇒n-t座標系におけるt軸電流を用いて本アプローチを実現 ⇒電圧位相δの代用として最適と考えられる PMSM モデル式 ∗ ∗ × 1/s P
ωe = 0.1p.u. FB it FB ωe = 1p.u. システム極の回転速度依存性 (State FB gains are the same) Proposed: it FB JL K P j L R K s e n o eo cos 2 1 2 JL K P j K s e n 2 1 JL K P j L R K s e n o eo cos 2 1 Conv. : FB Ideal : δ FB システム極の理論式 制御安定化に t軸電流を利用 提案する簡易センサレス制御のブロック図 L R Here eo ≪ , L R Here eo ≪ , PMSM モデル式 ∗ ∗ × 1/s P
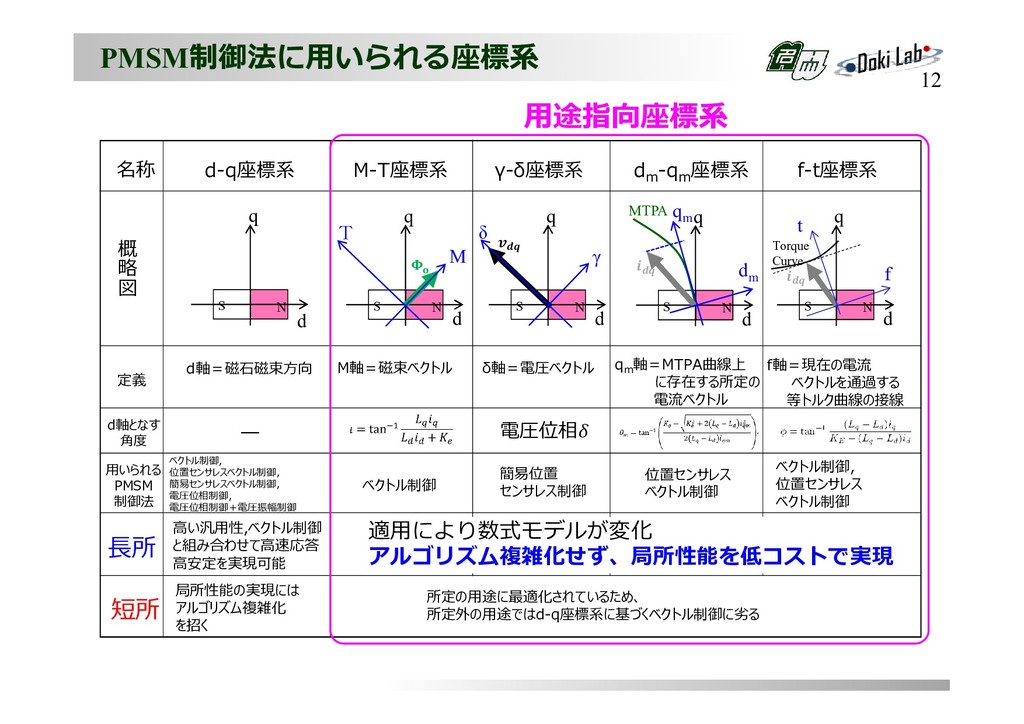
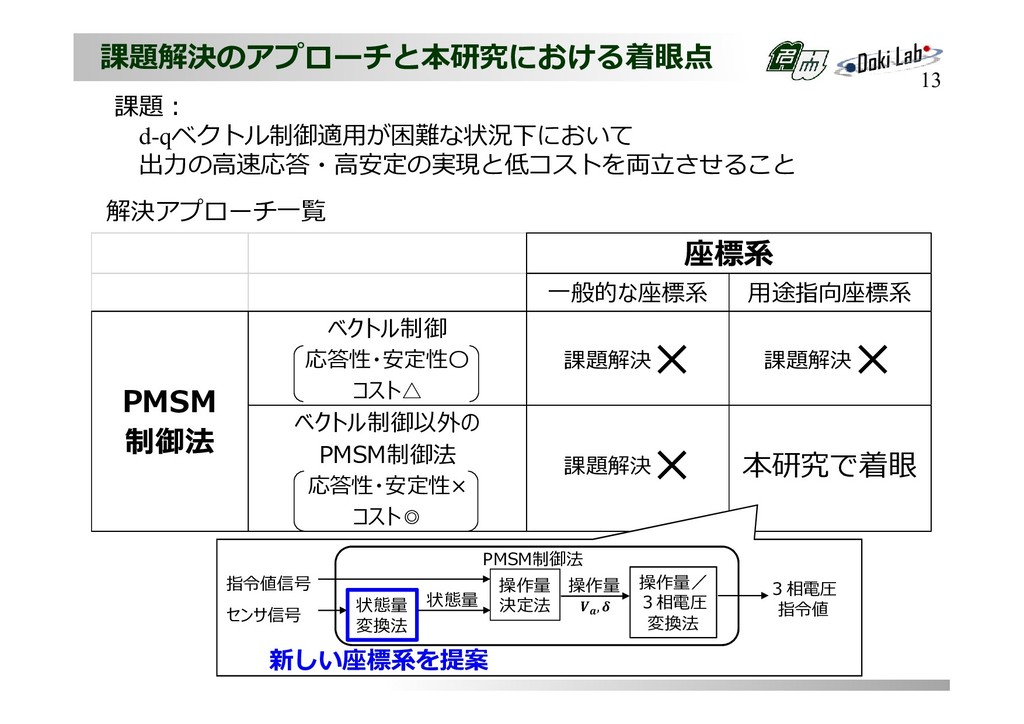
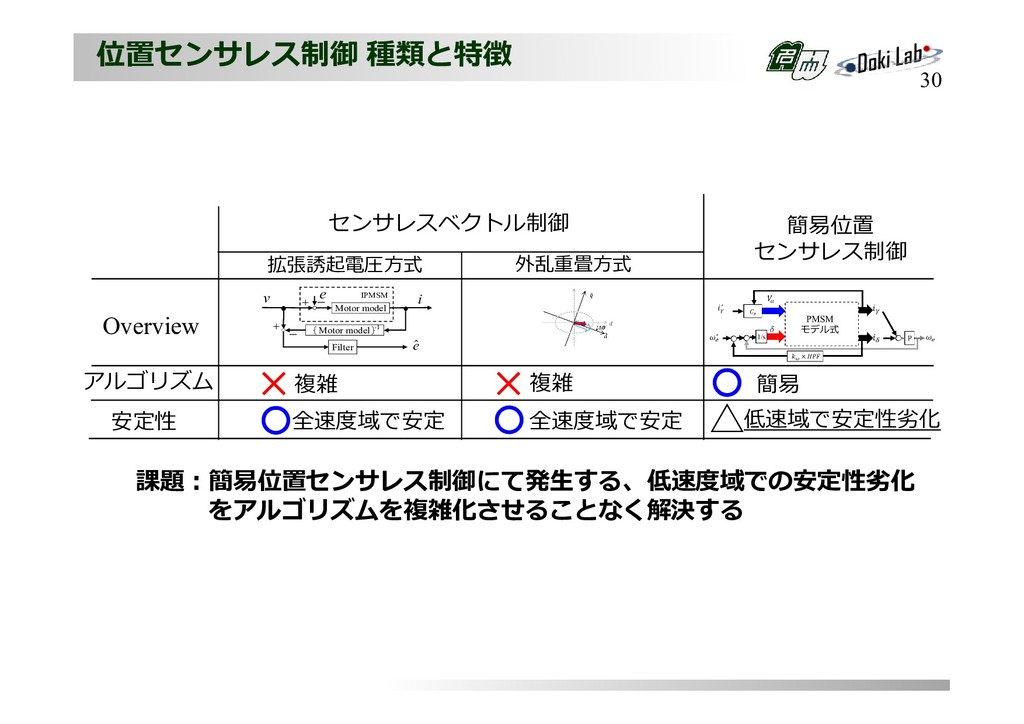
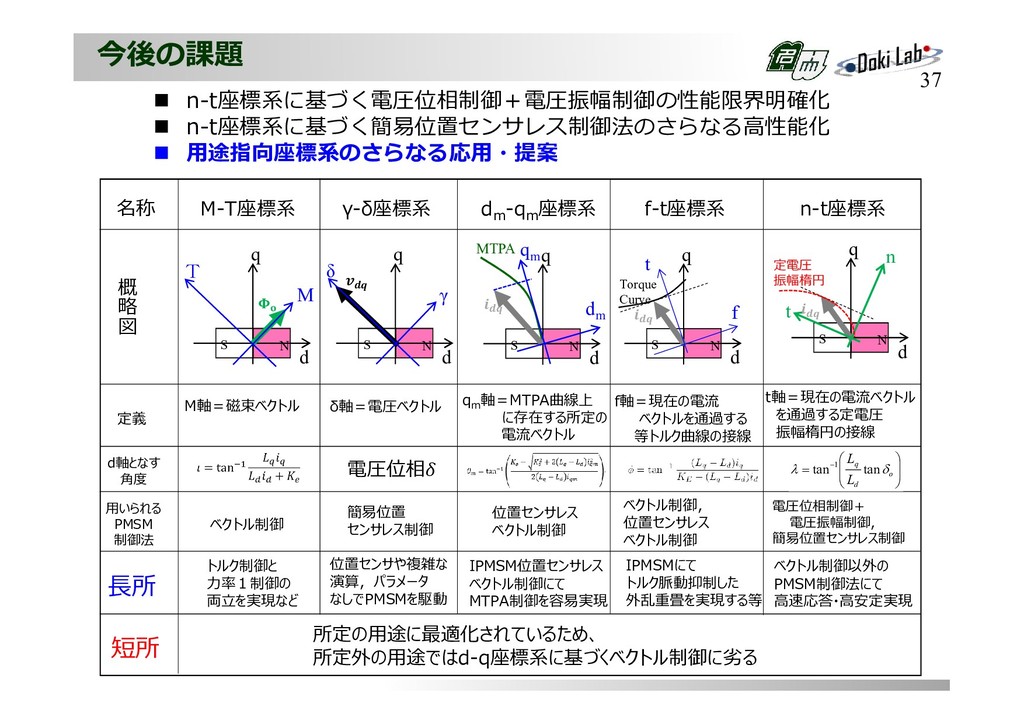
図 短所 名称 ⾧所 用いられる PMSM 制御法 d軸となす 角度 定義 d q N S M T 所定の用途に最適化されているため、 所定外の用途ではd-q座標系に基づくベクトル制御に劣る ベクトル制御 d q N S γ δ 簡易位置 センサレス制御 M-T座標系 γ-δ座標系 dm -qm 座標系 f-t座標系 d q N S qm dm d q N S f t 位置センサレス ベクトル制御 ベクトル制御, 位置センサレス ベクトル制御 MTPA Torque Curve M軸=磁束ベクトル δ軸=電圧ベクトル qm 軸=MTPA曲線上 に存在する所定の 電流ベクトル f軸=現在の電流 ベクトルを通過する 等トルク曲線の接線 電圧位相 トルク制御と 力率1制御の 両立を実現など IPMSM位置センサレス ベクトル制御にて MTPA制御を容易実現 IPMSMにて トルク脈動抑制した 外乱重畳を実現する等 位置センサや複雑な 演算,パラメータ なしでPMSMを駆動 d q N S n t 定電圧 振幅楕円 t軸=現在の電流ベクトル を通過する定電圧 振幅楕円の接線 o d q L L tan tan 1 電圧位相制御+ 電圧振幅制御, 簡易位置センサレス制御 n-t座標系 ベクトル制御以外の PMSM制御法にて 高速応答・高安定実現
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}