Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
201803生態学会山北集会
Search
naru-T
March 19, 2018
Research
260
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
201803生態学会山北集会
naru-T
March 19, 2018
More Decks by naru-T
See All by naru-T
Naru Tsutsumida
narut
0
1.8k
Other Decks in Research
See All in Research
Dual Quadric表現を用いた動的物体追跡とRGB-D・IMU制約の密結合によるオドメトリ推定
nanoshimarobot
0
470
【Zozo Research 技術共有会】三次元領域の現在と展望
mickey_0226
3
510
敵対生成プロンプト同時探索による内省型プロンプト最適化
kinoue_smarthr
0
340
東京大学工学部計数工学科、計数工学特別講義の説明資料
kikuzo
0
580
Claude Code × autoresearch 実践
mathbullet
0
220
LLM Compute Infrastructure Overview
karakurist
2
1.6k
LLM の Attention 機構まとめ — 数式・計算量・メモリ
puwaer
8
2.4k
コーディングエージェントとABNを再考
hf149
2
810
Model Discovery and Graph Simulation: A Lightweight Gateway to Chaos Engineering
anatolykr
0
240
AIを叩き台として、 「検証」から「共創」へと進化するリサーチ
mela_dayo
0
320
IA for theory
gpeyre
0
310
LA-Bench 2025:実験指示から 実行可能手順を生成するためのデータセット/LA-Bench 2025: A Dataset for Generating Executable Experimental Procedures from Experimental Instructions
stktu
0
110
Featured
See All Featured
What the history of the web can teach us about the future of AI
inesmontani
PRO
1
650
Scaling GitHub
holman
464
140k
Believing is Seeing
oripsolob
1
180
My Coaching Mixtape
mlcsv
0
180
Raft: Consensus for Rubyists
vanstee
141
7.6k
Un-Boring Meetings
codingconduct
0
360
A brief & incomplete history of UX Design for the World Wide Web: 1989–2019
jct
2
430
HDC tutorial
michielstock
2
760
SERP Conf. Vienna - Web Accessibility: Optimizing for Inclusivity and SEO
sarafernandez
2
1.5k
Exploring anti-patterns in Rails
aemeredith
3
450
Rails Girls Zürich Keynote
gr2m
96
14k
The AI Revolution Will Not Be Monopolized: How open-source beats economies of scale, even for LLMs
inesmontani
PRO
3
3.7k
Transcript
大規模リモートセンシングデータをもちいた土地 被覆分類 堤田 成政 京都大学 地球環境学堂
内容 大規模リモートセンシングデータをもちいた土地被覆分類 ◦ 1.データが大きいので・・・ ▪ DL→分析前処理までが大変 ▪ 分析が大変 ◦ 2.教師データの収集が大変(教師付き分類)
▪ なんだかんだいって教師データにすべてがかかっている ◦ 3.精度評価の辛み ▪ 精度評価は評価サンプルにすべてがかかっている ▪ 精度評価の辛み ▪ 空間精度評価の試み ▪ 誤差を含んだ分類図利用 ▪ ポリゴンデータの精度評価 ◦ まとめ:ふるくてあたらしい土地被覆分類研究
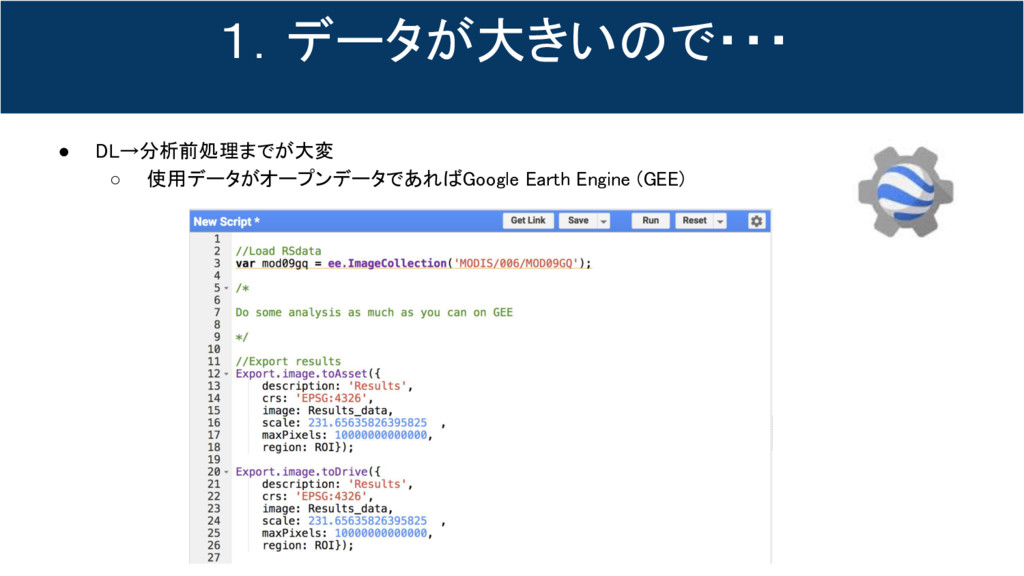
1.データが大きいので・・・ • DL→分析前処理までが大変 ◦ 使用データがオープンデータであればGoogle Earth Engine (GEE)
データが大きいので・・・ • 分析が大変 (Rを想定) ◦ nvblas (on nvidia GPU)を使う ◦ ラスターの使用RAMの上限を引き伸ばすrasterOptions(maxmemory
= 1e10) ◦ raster::clusterRを使う ◦ おそらくPythonでも一緒(numpy, rasterioまわりをいじる?) • これだけで数倍速! ◦ 個人的にはRもpythonも速度的には大した差がないのでは
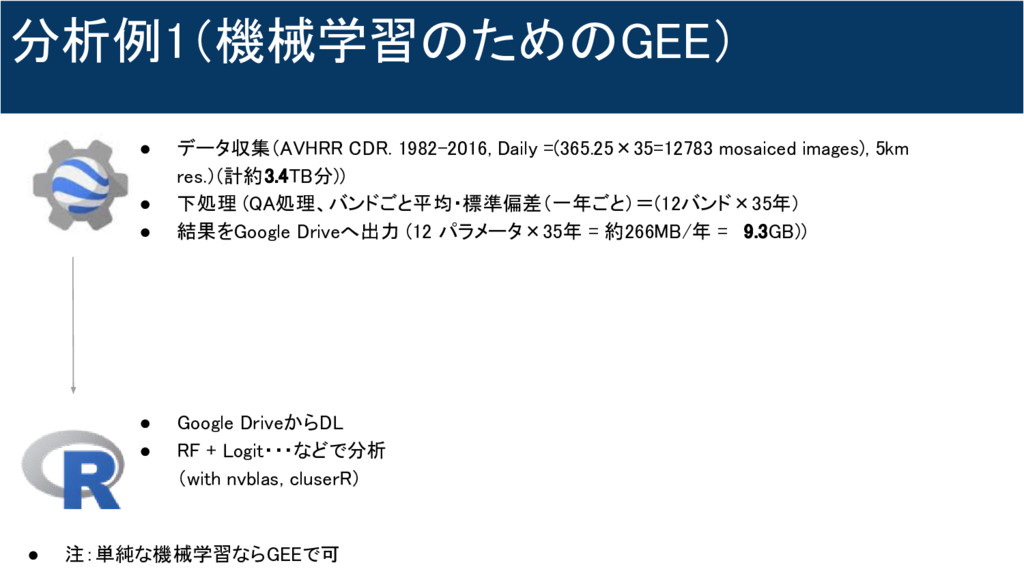
分析例1(機械学習のためのGEE) • データ収集(AVHRR CDR. 1982-2016, Daily =(365.25×35=12783 mosaiced images), 5km
res.)(計約3.4TB分)) • 下処理 (QA処理、バンドごと平均・標準偏差(一年ごと)=(12バンド×35年) • 結果をGoogle Driveへ出力 (12 パラメータ×35年 = 約266MB/年 = 9.3GB)) • Google DriveからDL • RF + Logit・・・などで分析 (with nvblas, cluserR) • 注:単純な機械学習ならGEEで可
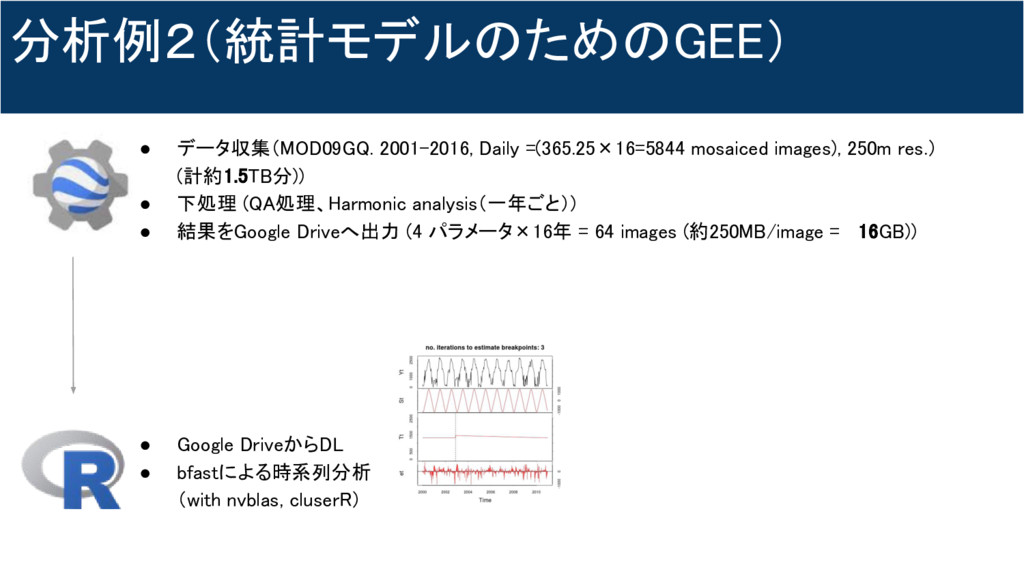
分析例2(統計モデルのためのGEE) • データ収集(MOD09GQ. 2001-2016, Daily =(365.25×16=5844 mosaiced images), 250m res.)
(計約1.5TB分)) • 下処理 (QA処理、Harmonic analysis(一年ごと)) • 結果をGoogle Driveへ出力 (4 パラメータ×16年 = 64 images (約250MB/image = 16GB)) • Google DriveからDL • bfastによる時系列分析 (with nvblas, cluserR)
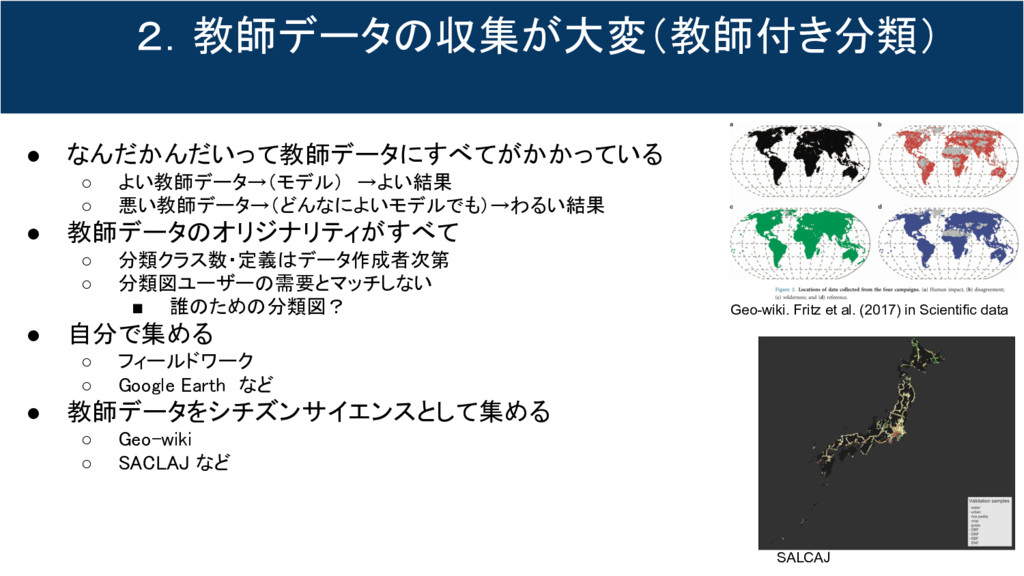
2.教師データの収集が大変(教師付き分類) • なんだかんだいって教師データにすべてがかかっている ◦ よい教師データ→(モデル) →よい結果 ◦ 悪い教師データ→(どんなによいモデルでも)→わるい結果 • 教師データのオリジナリティがすべて ◦
分類クラス数・定義はデータ作成者次第 ◦ 分類図ユーザーの需要とマッチしない ▪ 誰のための分類図? • 自分で集める ◦ フィールドワーク ◦ Google Earth など • 教師データをシチズンサイエンスとして集める ◦ Geo-wiki ◦ SACLAJ など Geo-wiki. Fritz et al. (2017) in Scientific data SALCAJ
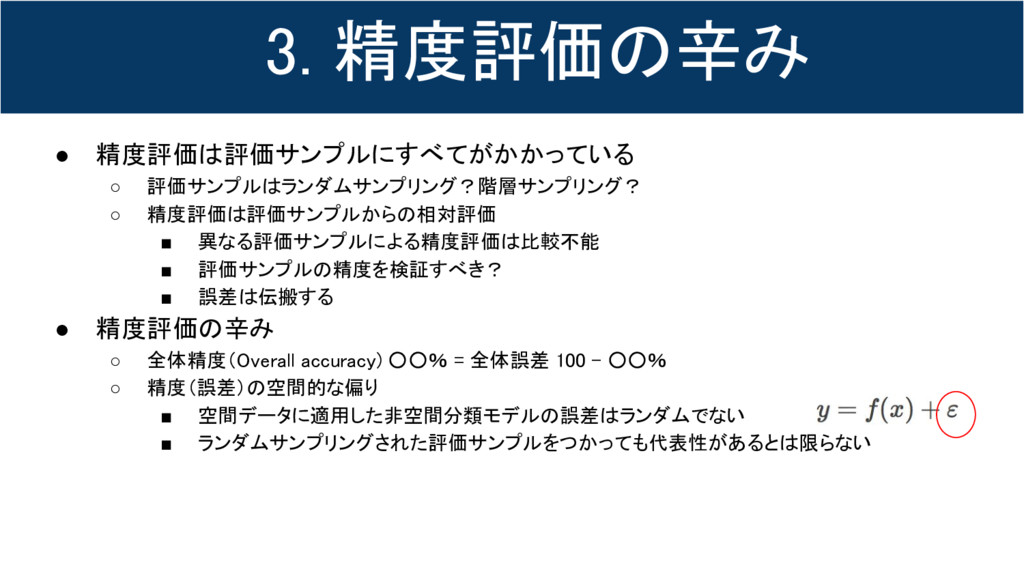
3. 精度評価の辛み • 精度評価は評価サンプルにすべてがかかっている ◦ 評価サンプルはランダムサンプリング?階層サンプリング? ◦ 精度評価は評価サンプルからの相対評価 ▪ 異なる評価サンプルによる精度評価は比較不能
▪ 評価サンプルの精度を検証すべき? ▪ 誤差は伝搬する • 精度評価の辛み ◦ 全体精度(Overall accuracy) ◦◦% = 全体誤差 100 - ◦◦% ◦ 精度(誤差)の空間的な偏り ▪ 空間データに適用した非空間分類モデルの誤差はランダムでない ▪ ランダムサンプリングされた評価サンプルをつかっても代表性があるとは限らない
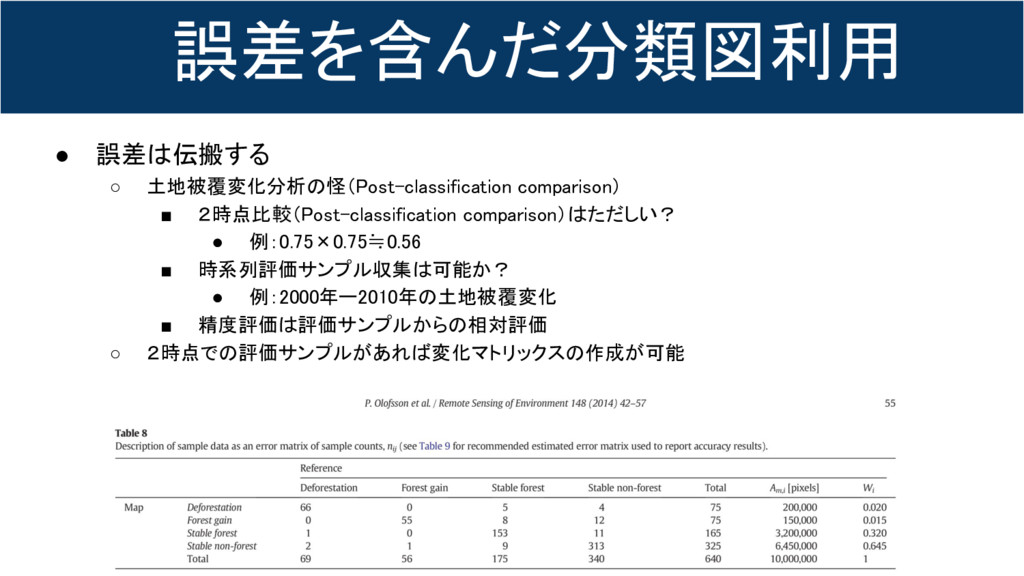
誤差を含んだ分類図利用 • 誤差は伝搬する ◦ 土地被覆変化分析の怪(Post-classification comparison) ▪ 2時点比較(Post-classification comparison)はただしい? •
例:0.75×0.75≒0.56 ▪ 時系列評価サンプル収集は可能か? • 例:2000年ー2010年の土地被覆変化 ▪ 精度評価は評価サンプルからの相対評価 ◦ 2時点での評価サンプルがあれば変化マトリックスの作成が可能
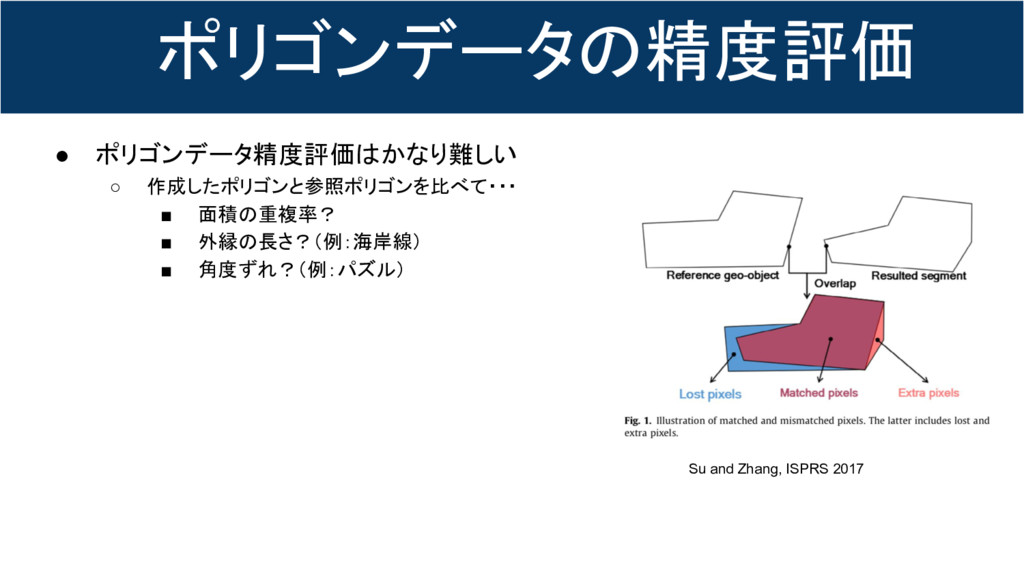
ポリゴンデータの精度評価 • ポリゴンデータ精度評価はかなり難しい ◦ 作成したポリゴンと参照ポリゴンを比べて・・・ ▪ 面積の重複率? ▪ 外縁の長さ?(例:海岸線) ▪
角度ずれ?(例:パズル) Su and Zhang, ISPRS 2017
まとめ:ふるくてあたらしい土地被覆分類研究 • 衛星・ドローン画像を分類する ◦ 使用データを決める(解像度) ▪ 使用データがおおすぎて決めれない ◦ 分類クラスを決める ▪
おれさま分類図はニーズにあわない • 人によって定義はバラバラ ▪ ユーザーがほしい分類図とは? ◦ 教師サンプルをつくる ▪ 多様なクラス組み合わせが可能な教師サンプル をどうつくる? ◦ モデルを組む ▪ 適切なモデル? ◦ 精度分析する ▪ 適切な参照データ? ▪ 適切な精度分析? ▪ 精度のばらつき • それ以外で分類する ◦ OSM ◦ Mapillary ◦ VR?
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}