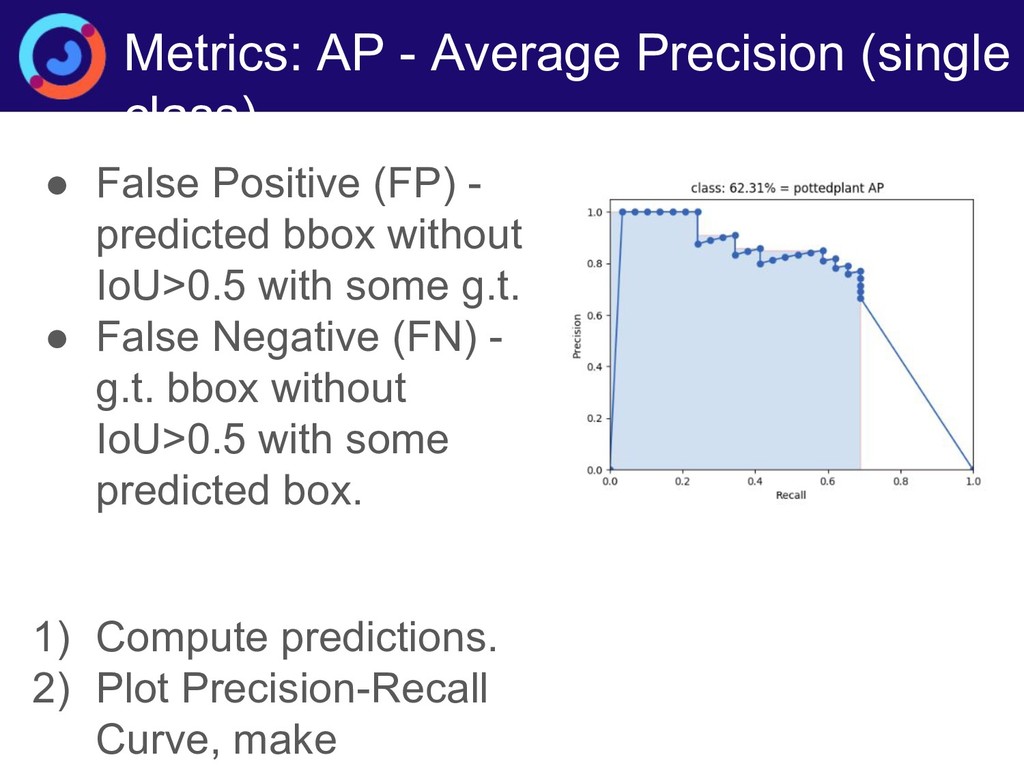
(FP) - predicted bbox without IoU>0.5 with some g.t. • False Negative (FN) - g.t. bbox without IoU>0.5 with some predicted box. 1) Compute predictions. 2) Plot Precision-Recall Curve, make
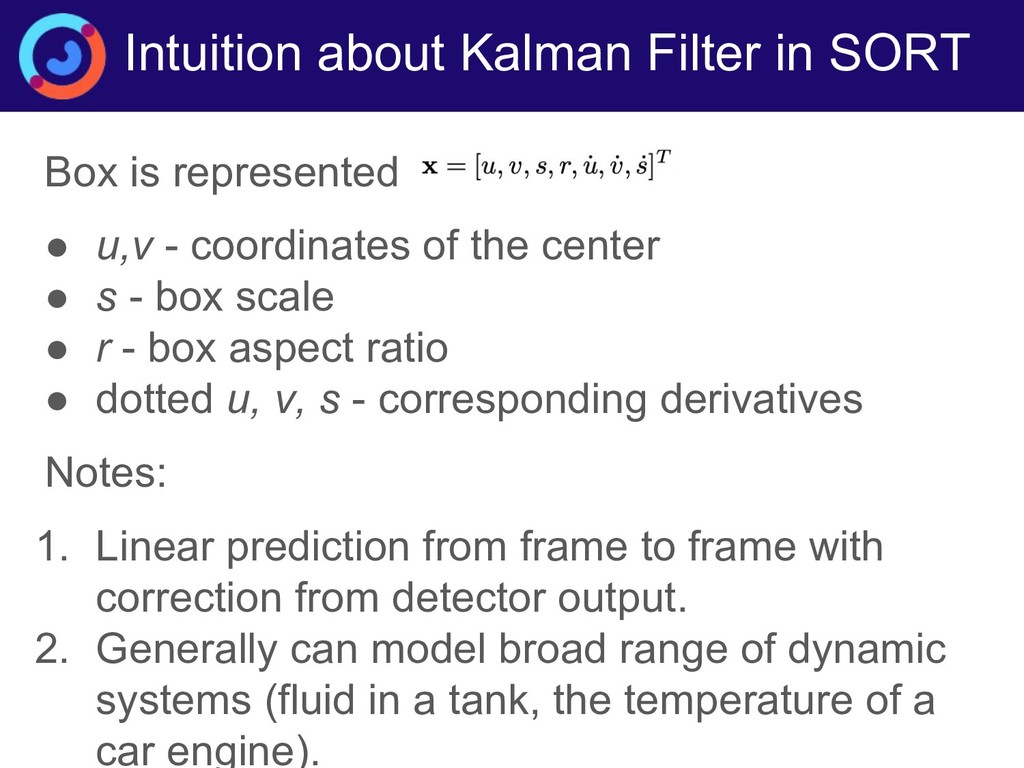
vector: • u,v - coordinates of the center • s - box scale • r - box aspect ratio • dotted u, v, s - corresponding derivatives Notes: 1. Linear prediction from frame to frame with correction from detector output. 2. Generally can model broad range of dynamic systems (fluid in a tank, the temperature of a car engine).
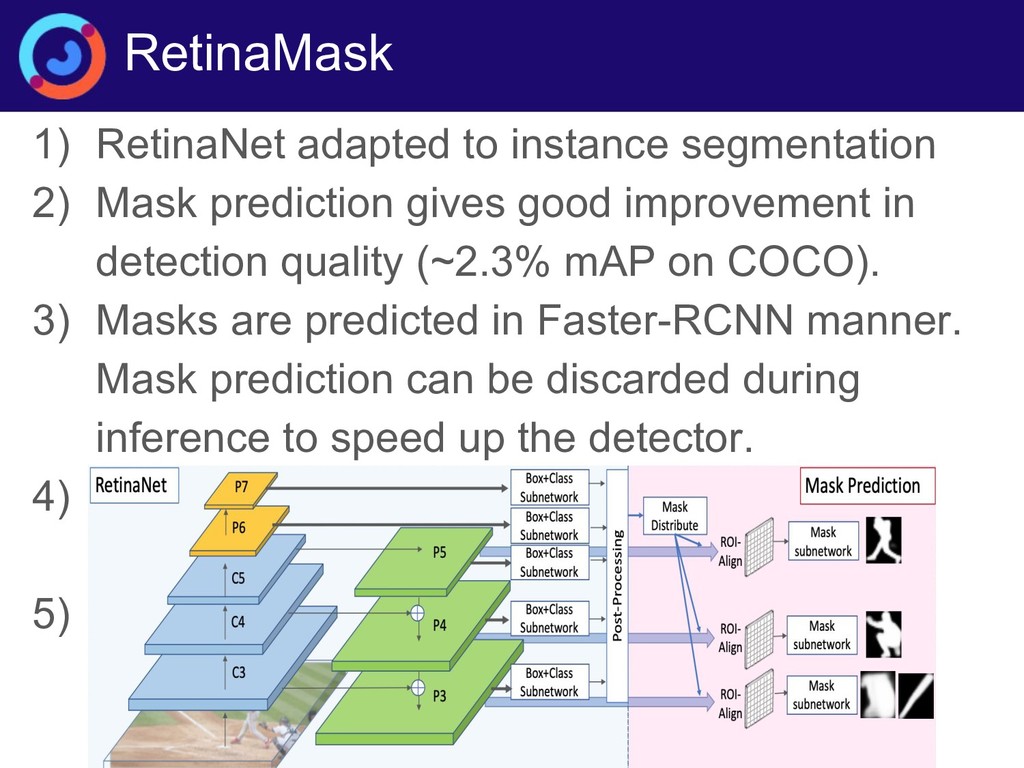
gives good improvement in detection quality (~2.3% mAP on COCO). 3) Masks are predicted in Faster-RCNN manner. Mask prediction can be discarded during inference to speed up the detector. 4) Tune masks on COCO “Person” category, detection on CrowdHuman. 5) Code and models available!
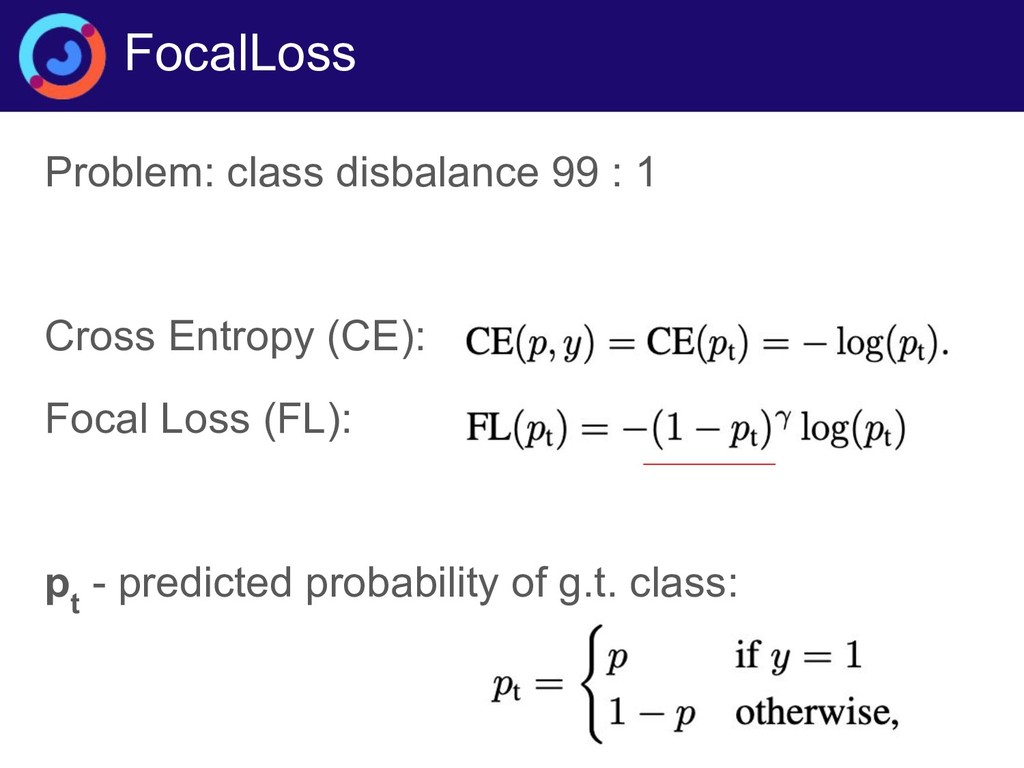
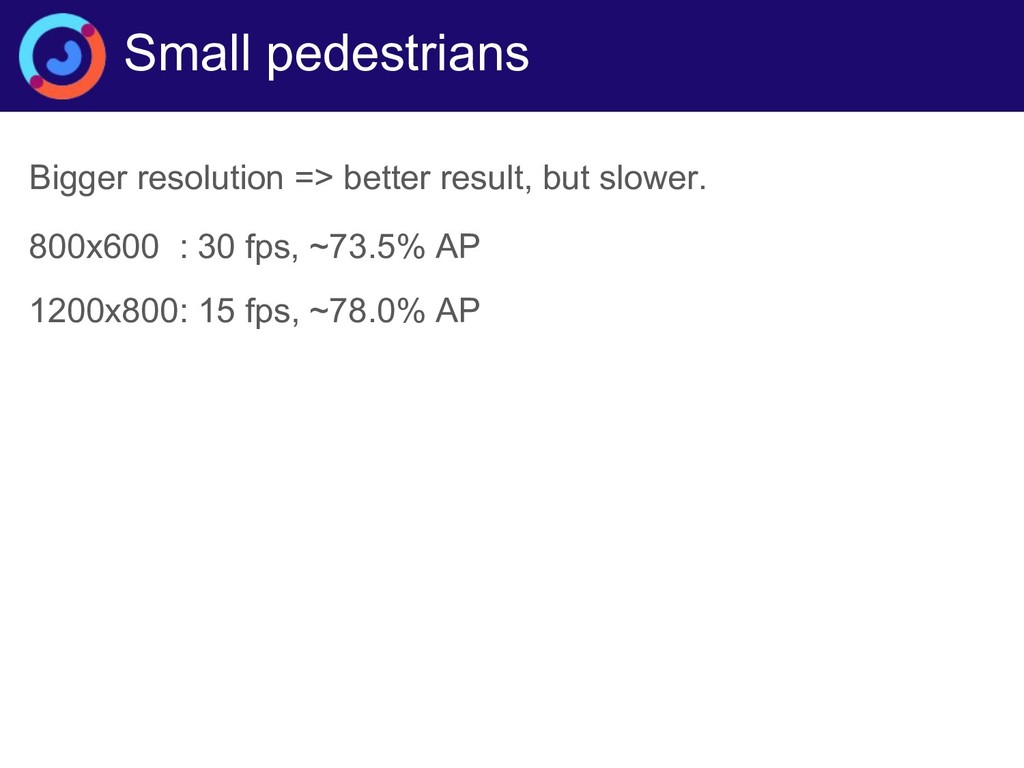
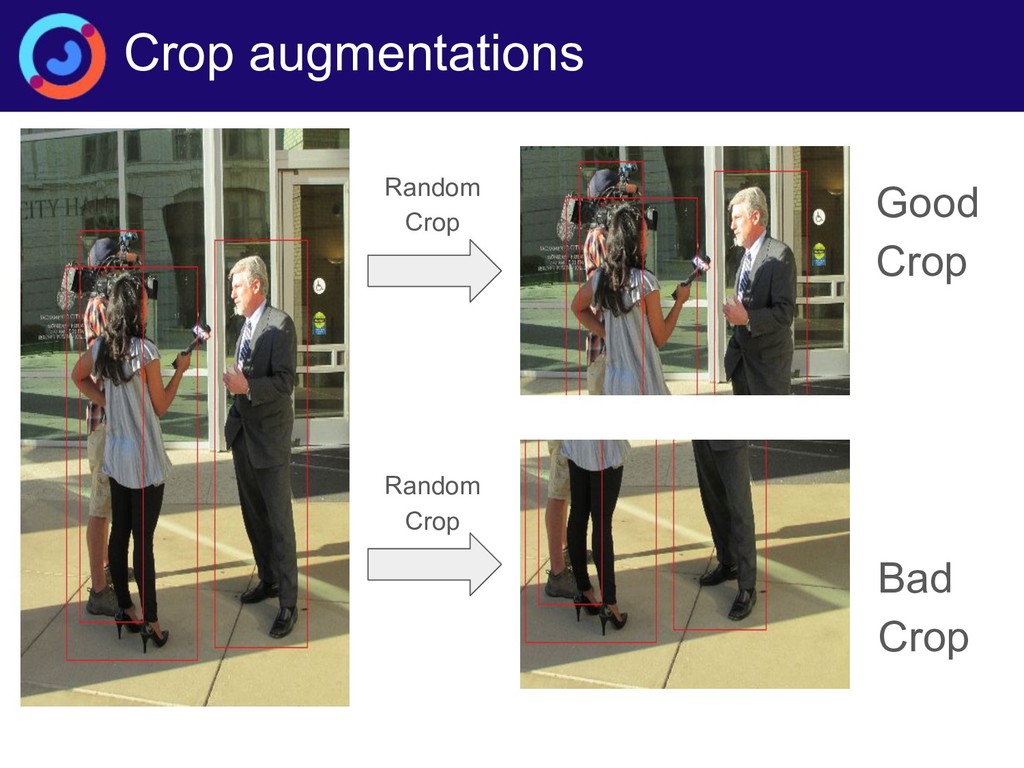
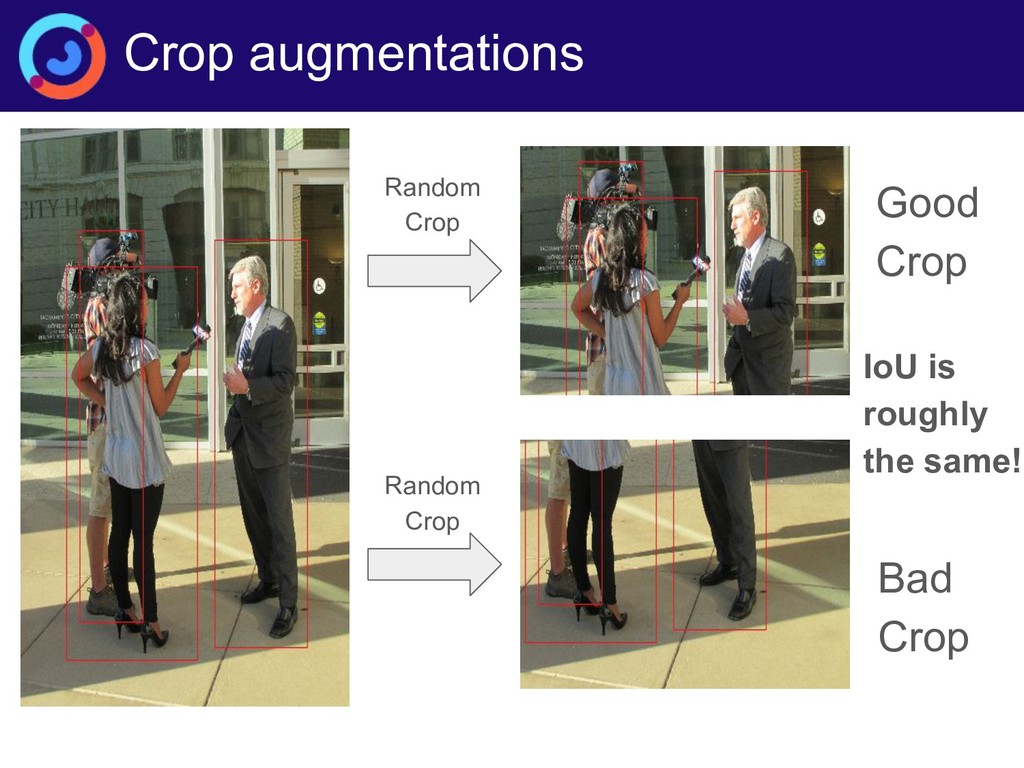
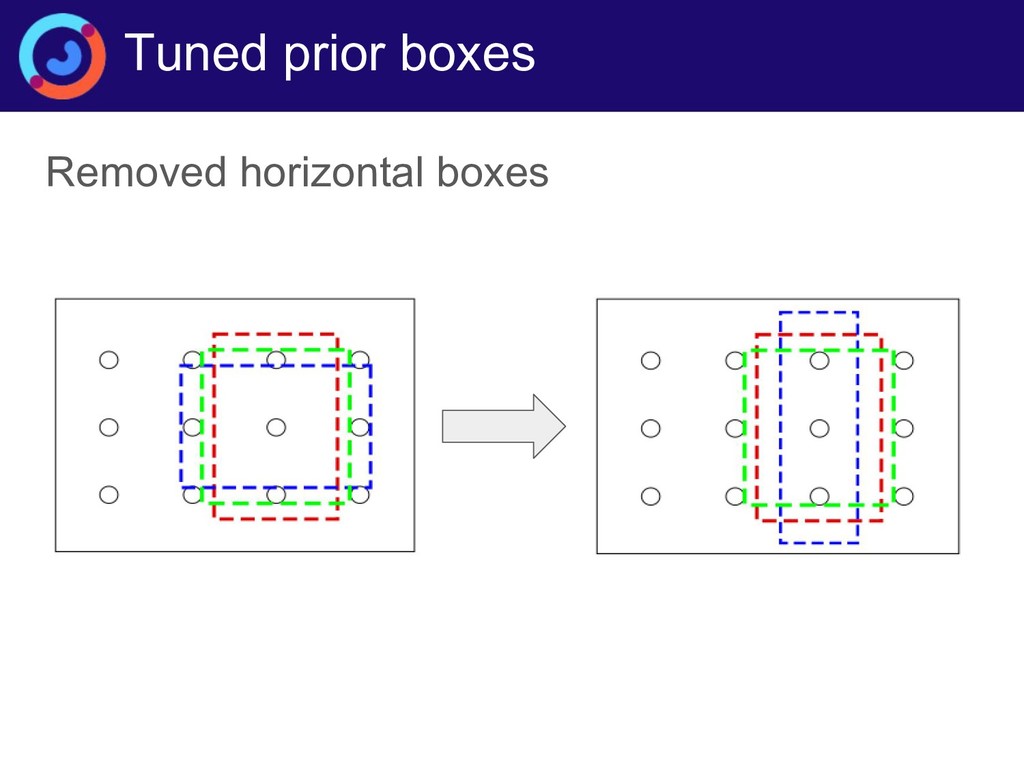
with RetinaNet arch. 3) FocalLoss 4) Bigger resolution (current models: 800x600 and 1200x800) 5) scale_by_aspect instead of simple resize. 6) Anchor box tuning. 7) Crop augmentations 8) Joint training with head detection. 9) Removing strides from convolutions in last
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}