de instâncias. Sim, já vimos os vetores no plano e espaço euclidianos. Generalizamos para ℝ e ℂ, com vetores linhas e coluna. Vimos também o espaço das matrizes ℳ(, ).
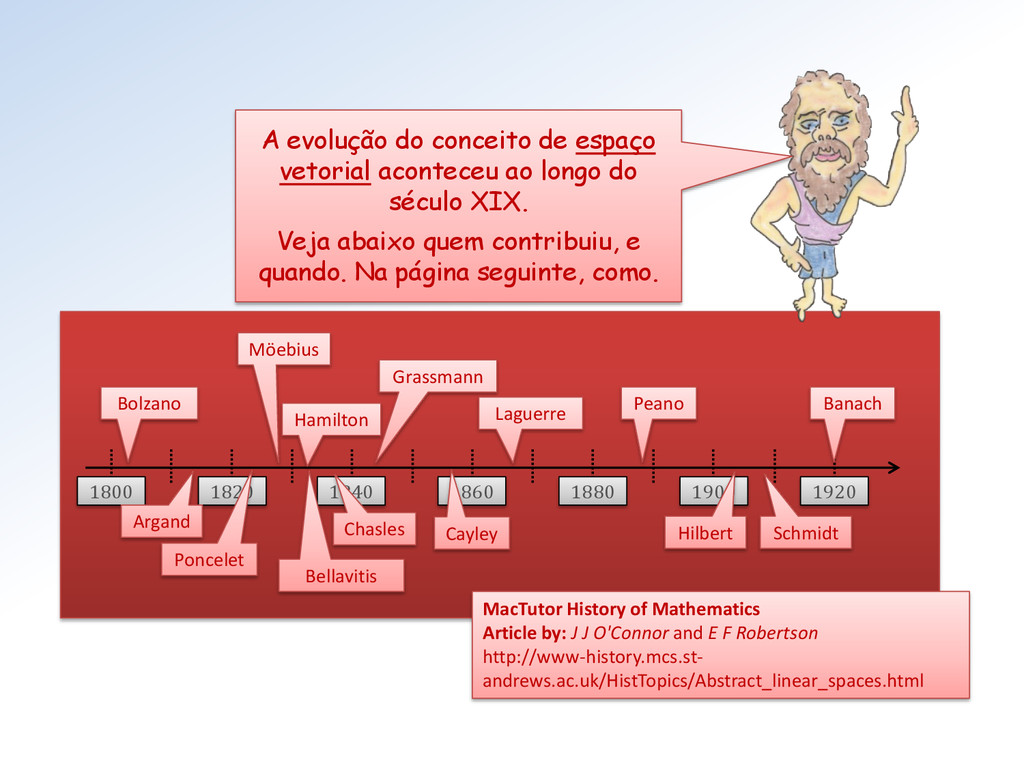
Möebius Grassmann Hilbert Peano Banach Schmidt Bellavitis Argand Cayley Laguerre Hamilton MacTutor History of Mathematics Article by: J J O'Connor and E F Robertson http://www-history.mcs.st- andrews.ac.uk/HistTopics/Abstract_linear_spaces.html A evolução do conceito de espaço vetorial aconteceu ao longo do século XIX. Veja abaixo quem contribuiu, e quando. Na página seguinte, como.
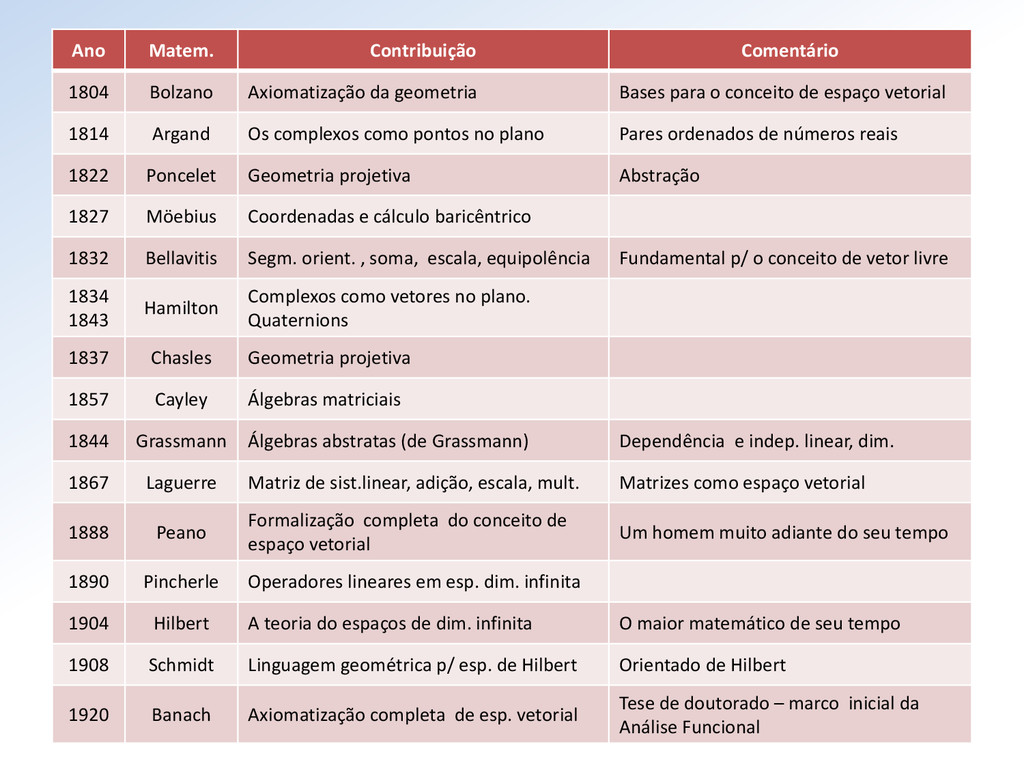
para o conceito de espaço vetorial 1814 Argand Os complexos como pontos no plano Pares ordenados de números reais 1822 Poncelet Geometria projetiva Abstração 1827 Möebius Coordenadas e cálculo baricêntrico 1832 Bellavitis Segm. orient. , soma, escala, equipolência Fundamental p/ o conceito de vetor livre 1834 1843 Hamilton Complexos como vetores no plano. Quaternions 1837 Chasles Geometria projetiva 1857 Cayley Álgebras matriciais 1844 Grassmann Álgebras abstratas (de Grassmann) Dependência e indep. linear, dim. 1867 Laguerre Matriz de sist.linear, adição, escala, mult. Matrizes como espaço vetorial 1888 Peano Formalização completa do conceito de espaço vetorial Um homem muito adiante do seu tempo 1890 Pincherle Operadores lineares em esp. dim. infinita 1904 Hilbert A teoria do espaços de dim. infinita O maior matemático de seu tempo 1908 Schmidt Linguagem geométrica p/ esp. de Hilbert Orientado de Hilbert 1920 Banach Axiomatização completa de esp. vetorial Tese de doutorado – marco inicial da Análise Funcional
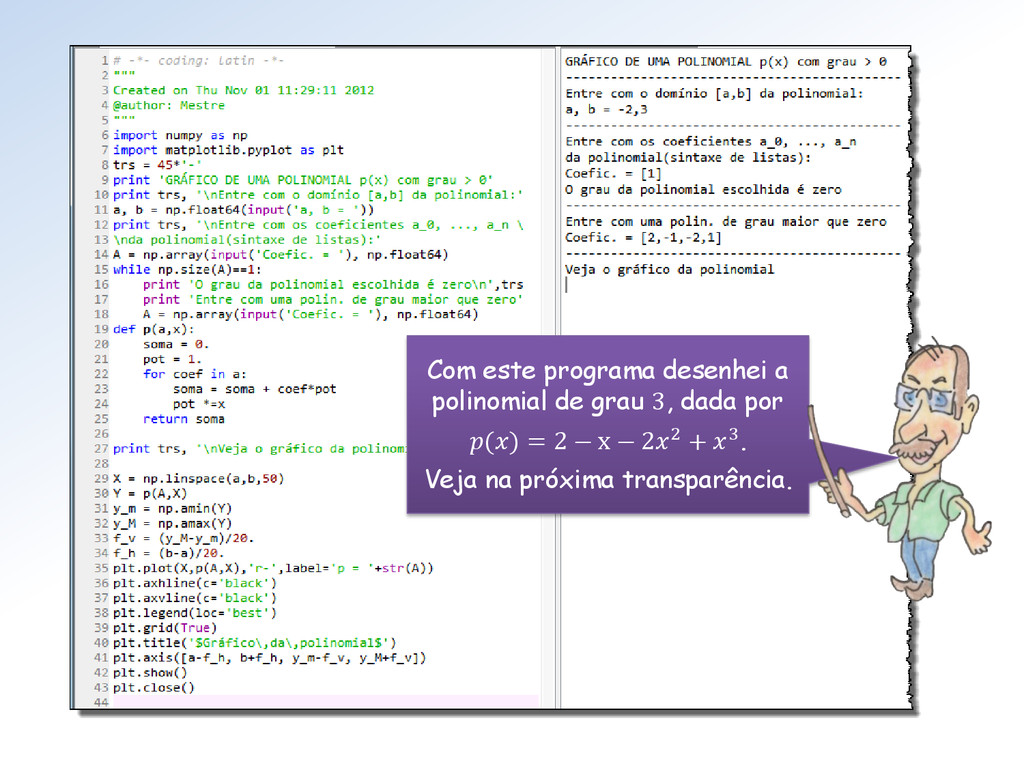
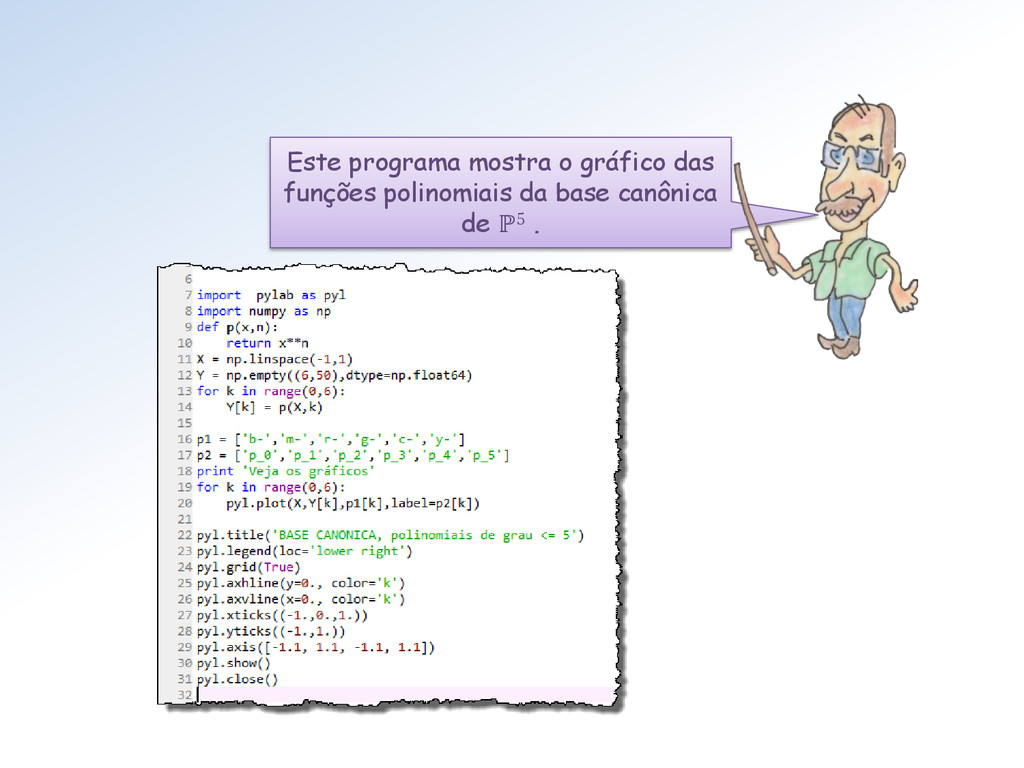
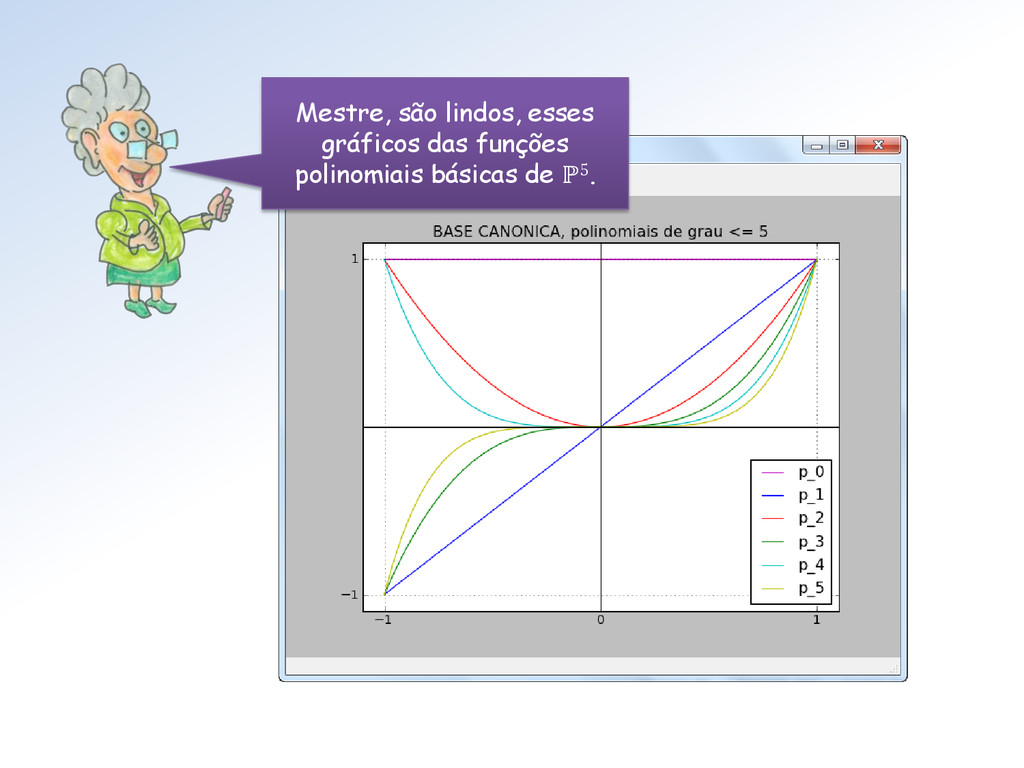
grau menor ou igual a 2 é constituída pelas polinomiais: 0 () = 0 = 1, 1 () = 1 = , 2 () = 2 . A ideia é a mesma. Para = 2.1 + −0.7 + 1.52 temos = 2.10 + −0.7 1 + 1.52
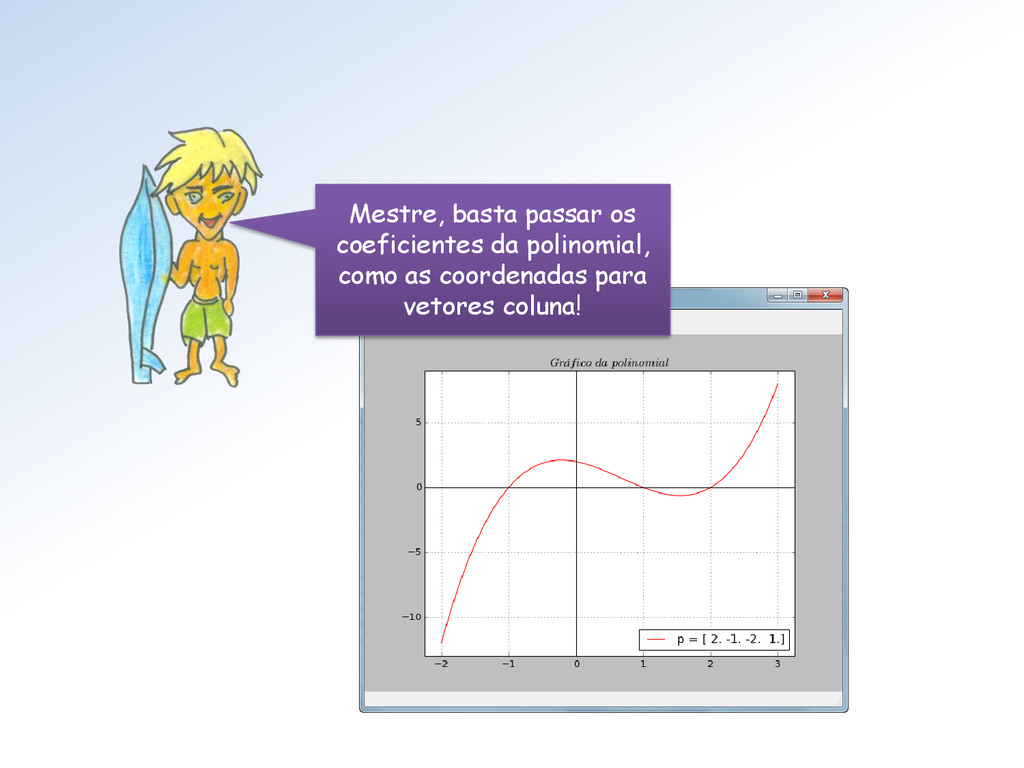
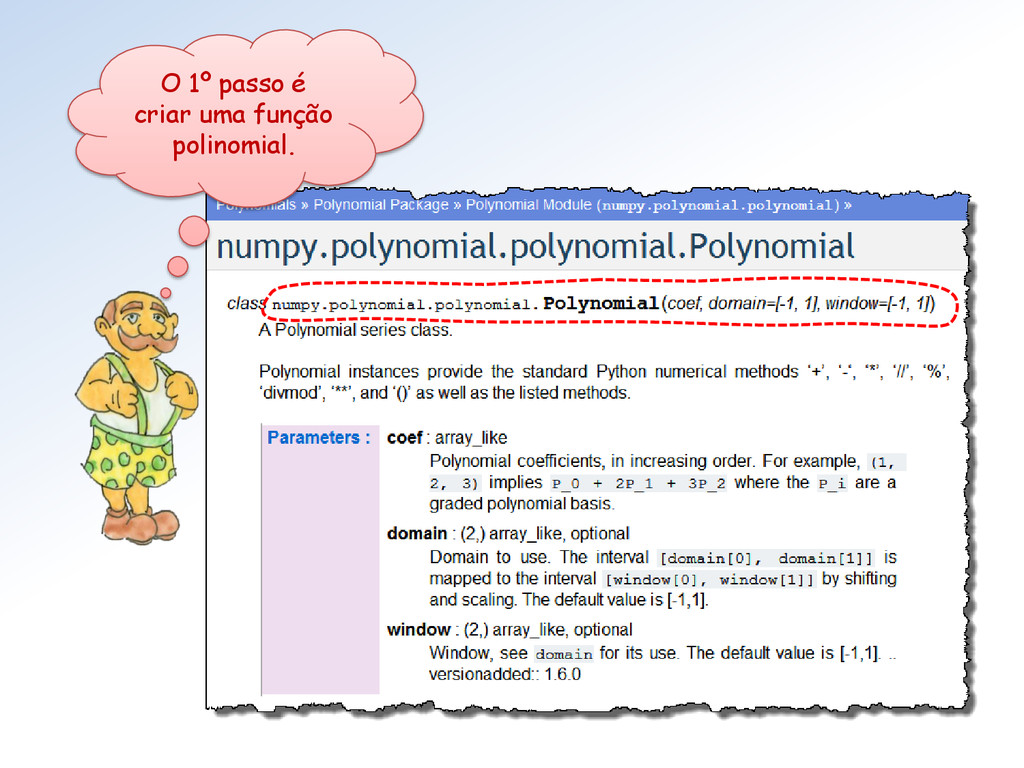
de ℙ2 basta especificar suas coordenadas 0 , 1 , 2 na base canônica: = 0 0 + 1 1 + 2 2 É exatamente essa a ideia utilizada para definir a classe polynomial da Numpy. Basta dar as coordenadas da polinomial p na base canônica.
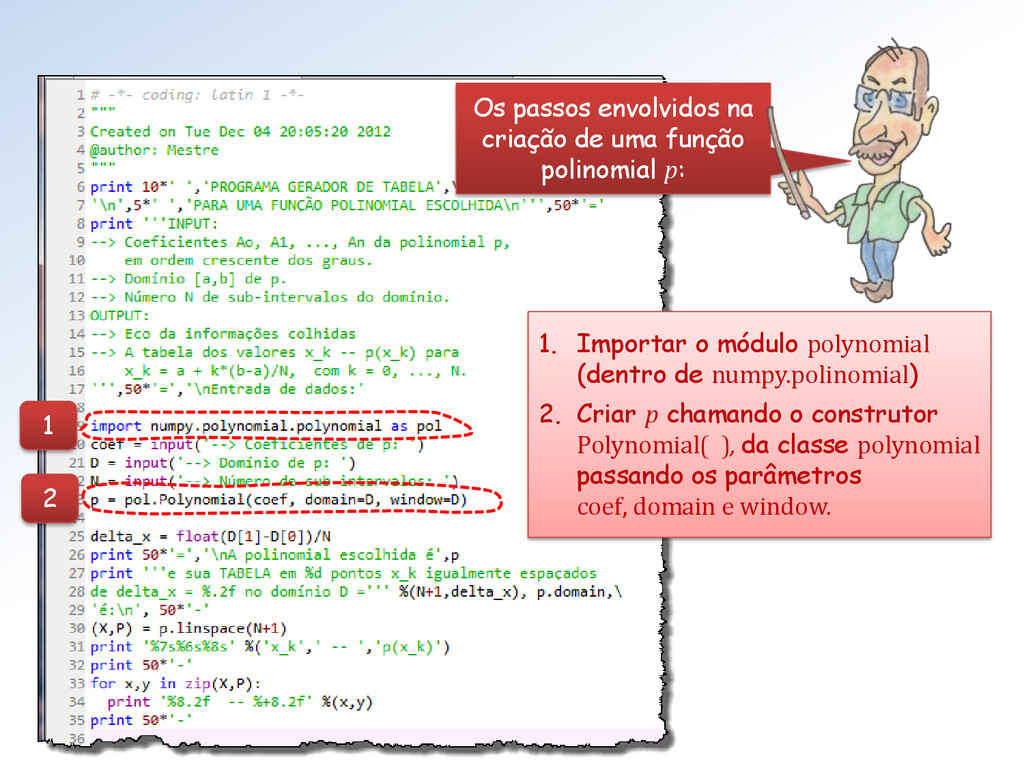
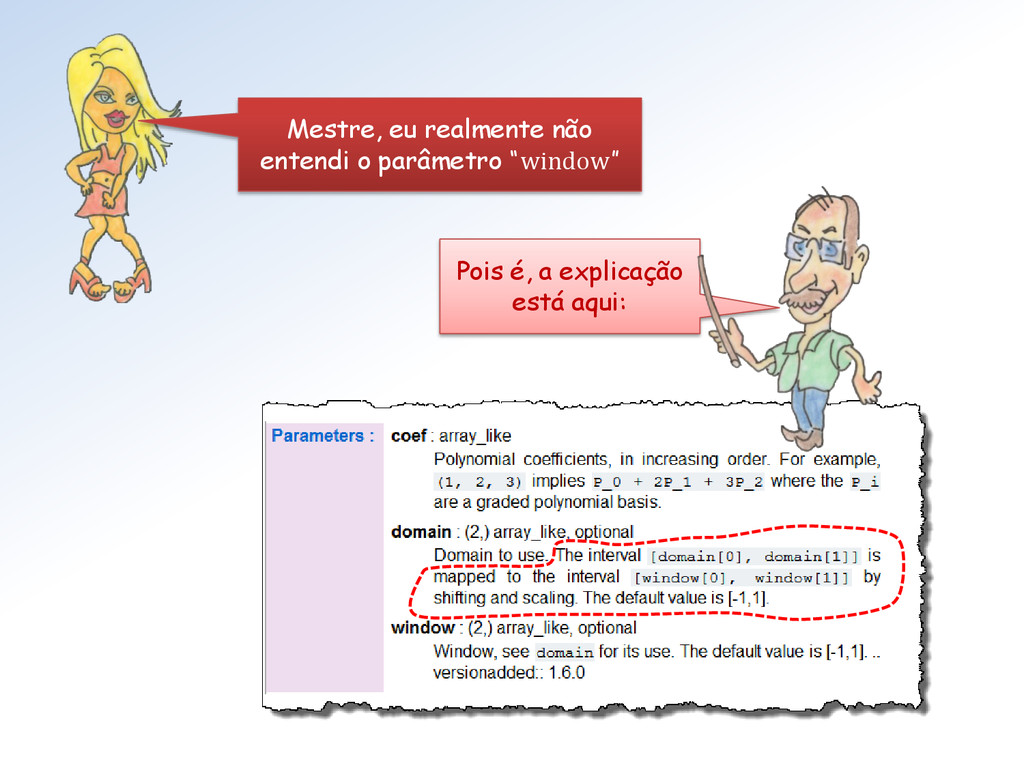
p chamando o construtor Polynomial( ), da classe polynomial passando os parâmetros coef, domain e window. Os passos envolvidos na criação de uma função polinomial p: 1 2
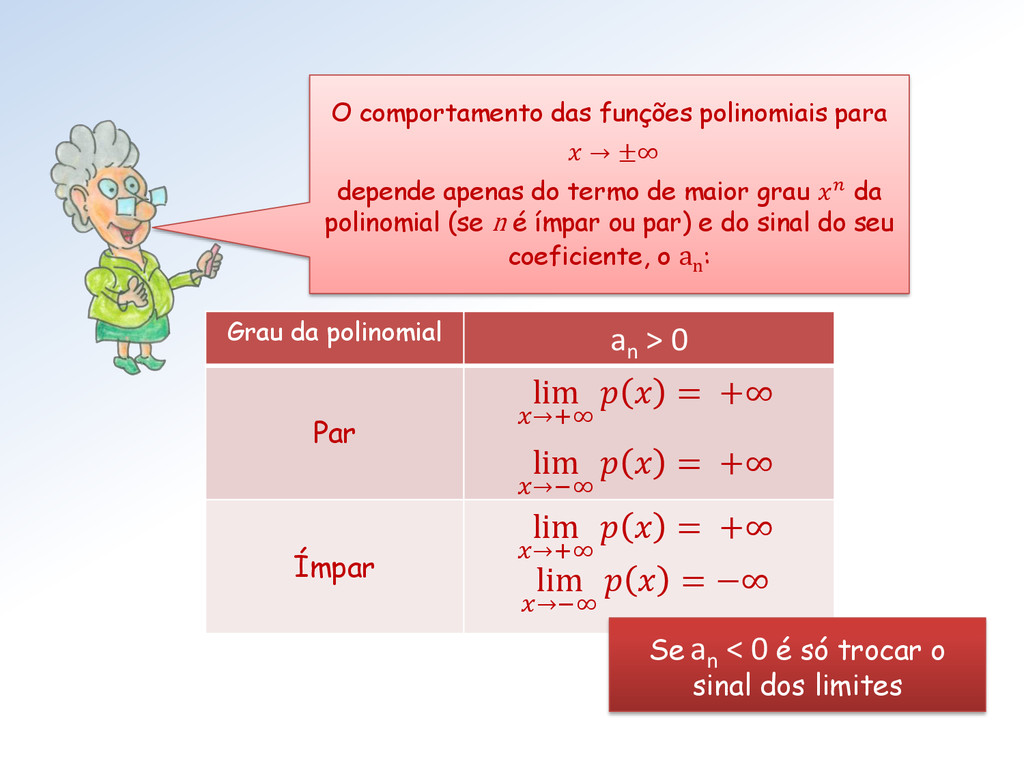
+∞ lim →−∞ = +∞ Ímpar lim →+∞ = +∞ lim →−∞ = −∞ O comportamento das funções polinomiais para → ±∞ depende apenas do termo de maior grau da polinomial (se n é ímpar ou par) e do sinal do seu coeficiente, o a n : Se an < 0 é só trocar o sinal dos limites
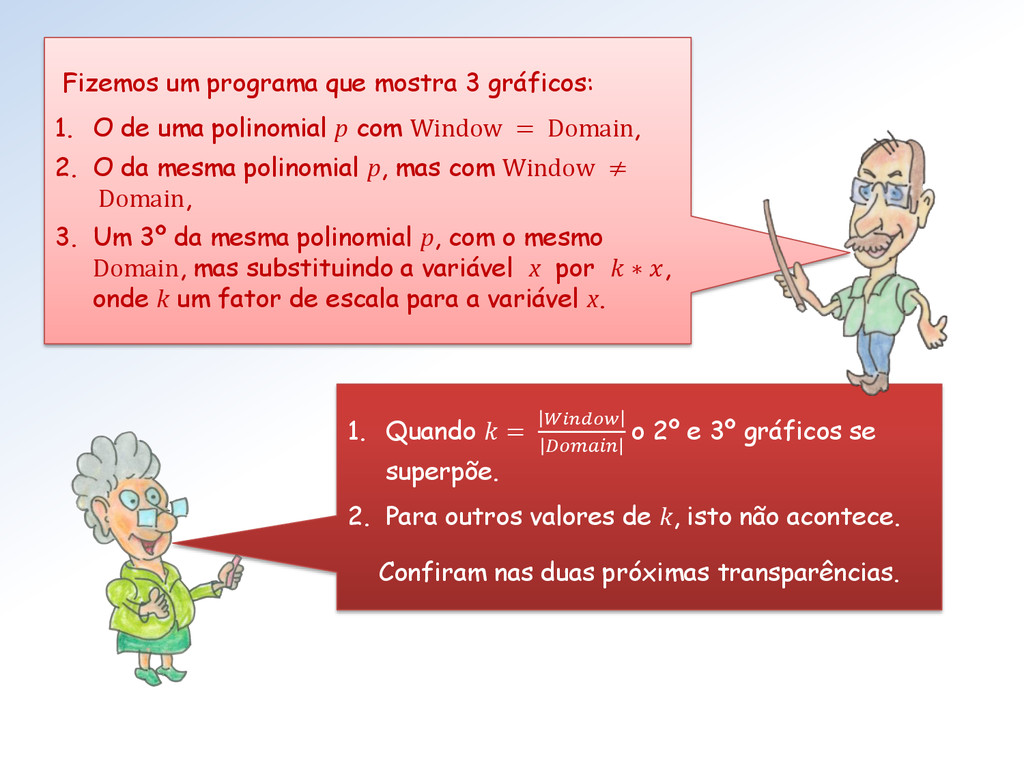
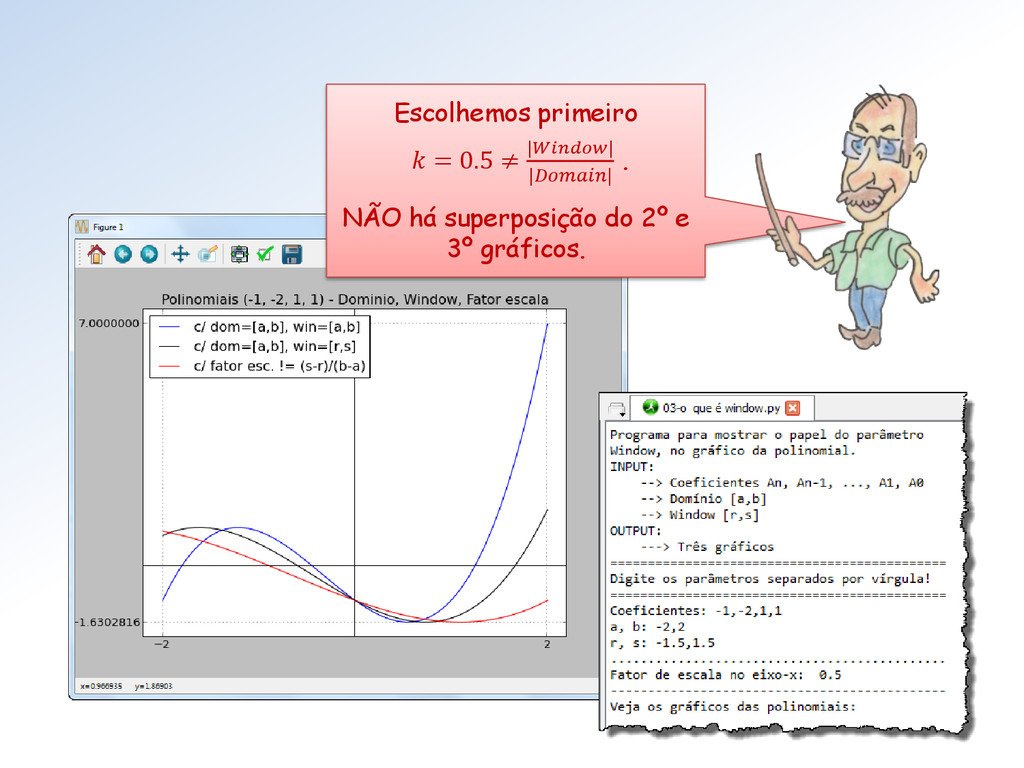
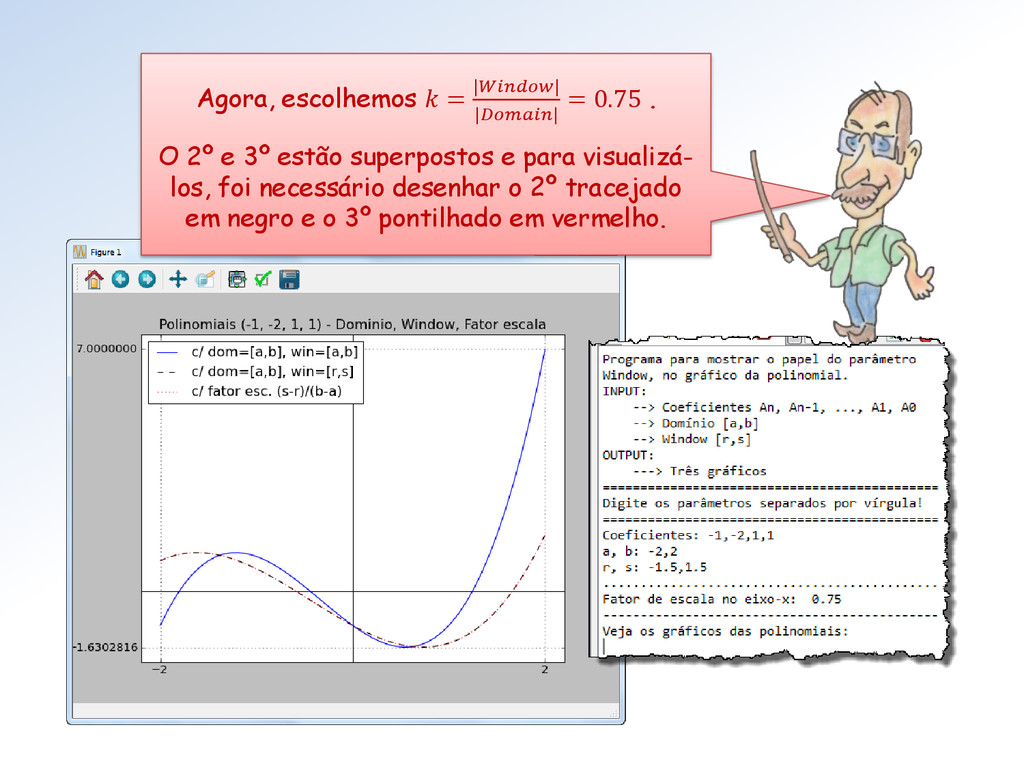
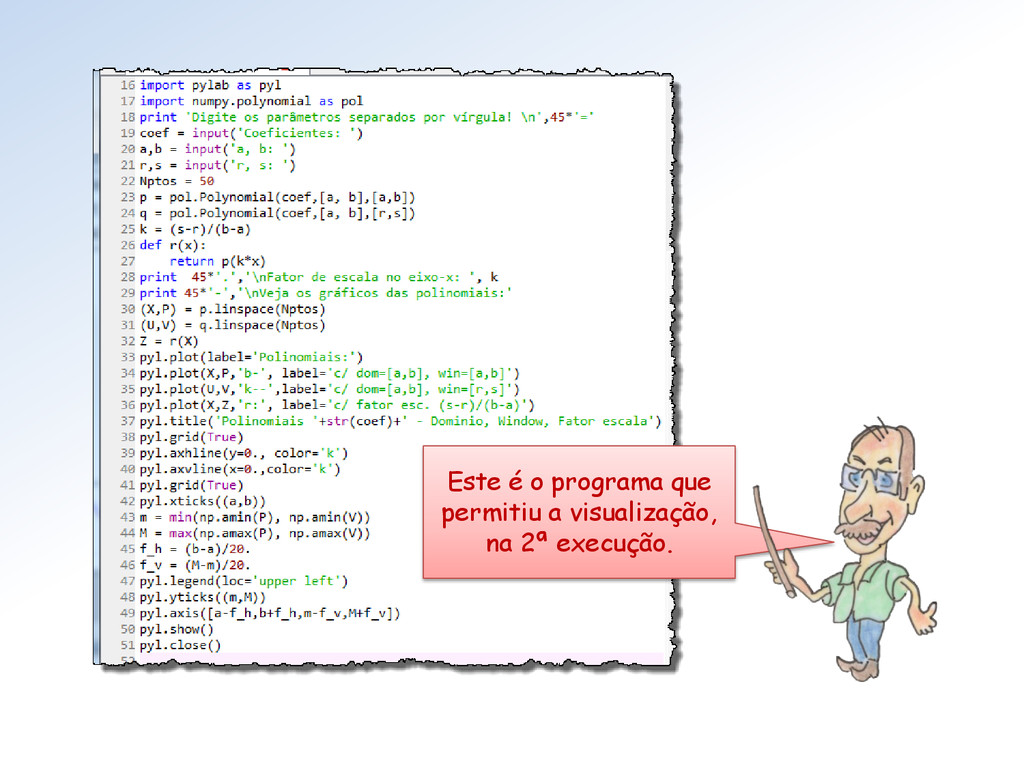
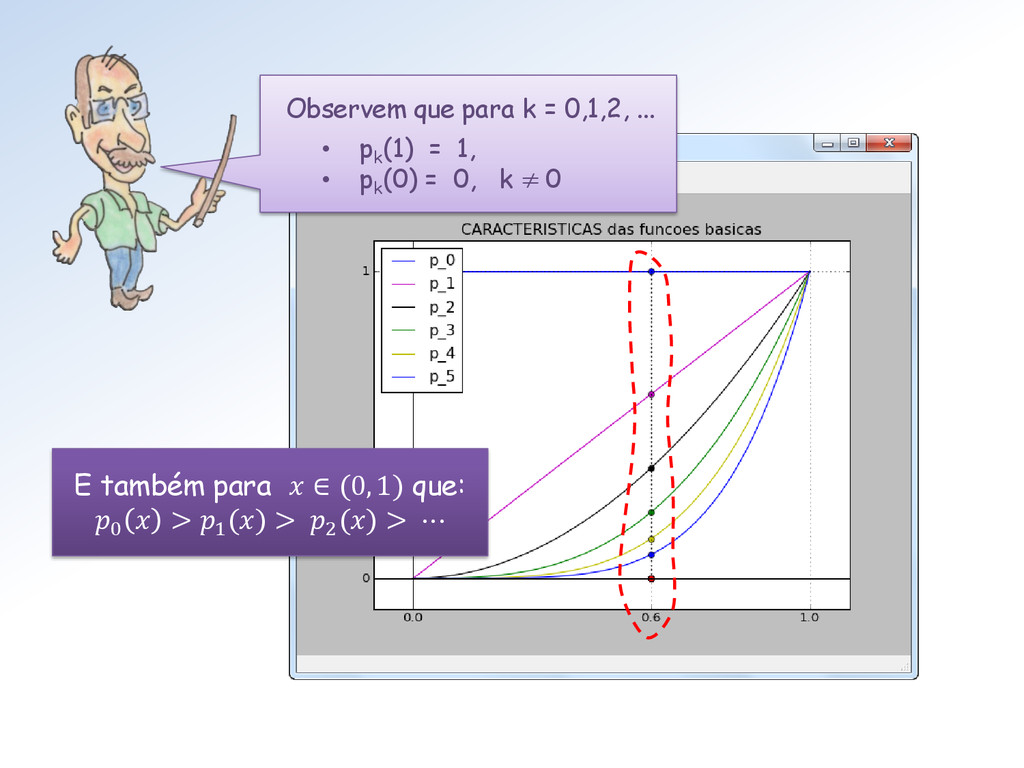
2. Para outros valores de k, isto não acontece. Confiram nas duas próximas transparências. Fizemos um programa que mostra 3 gráficos: 1. O de uma polinomial p com Window = Domain, 2. O da mesma polinomial p, mas com Window ≠ Domain, 3. Um 3º da mesma polinomial p, com o mesmo Domain, mas substituindo a variável x por ∗ , onde k um fator de escala para a variável x.
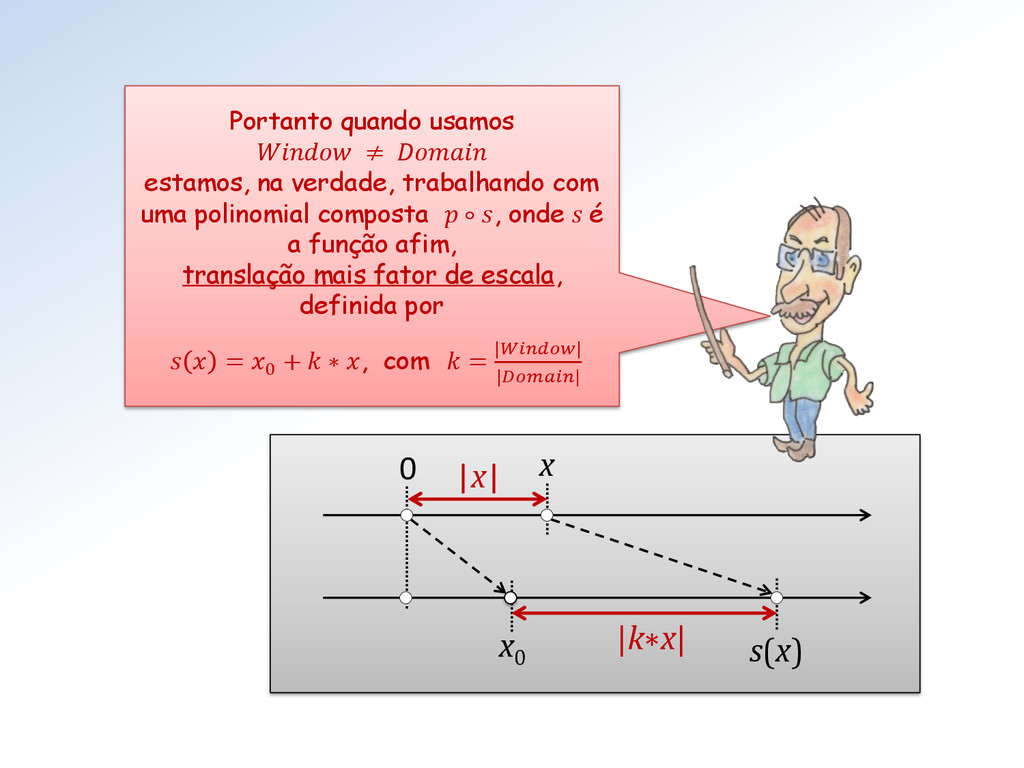
≠ estamos, na verdade, trabalhando com uma polinomial composta ∘ , onde s é a função afim, translação mais fator de escala, definida por = 0 + ∗ , com = || ||
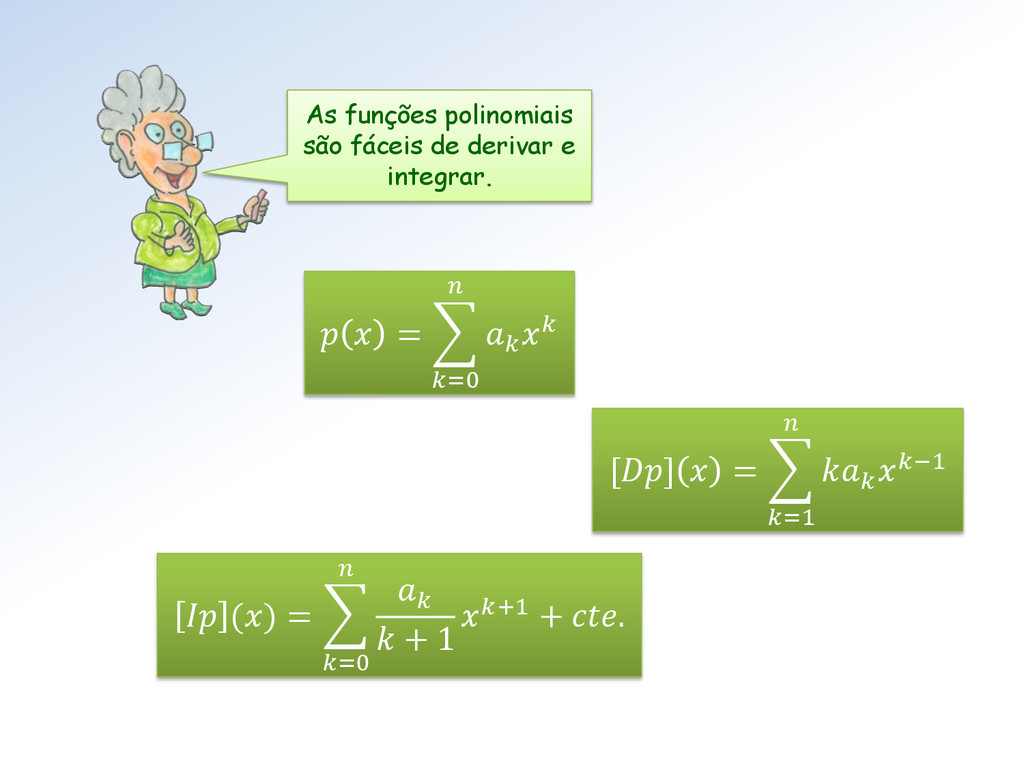
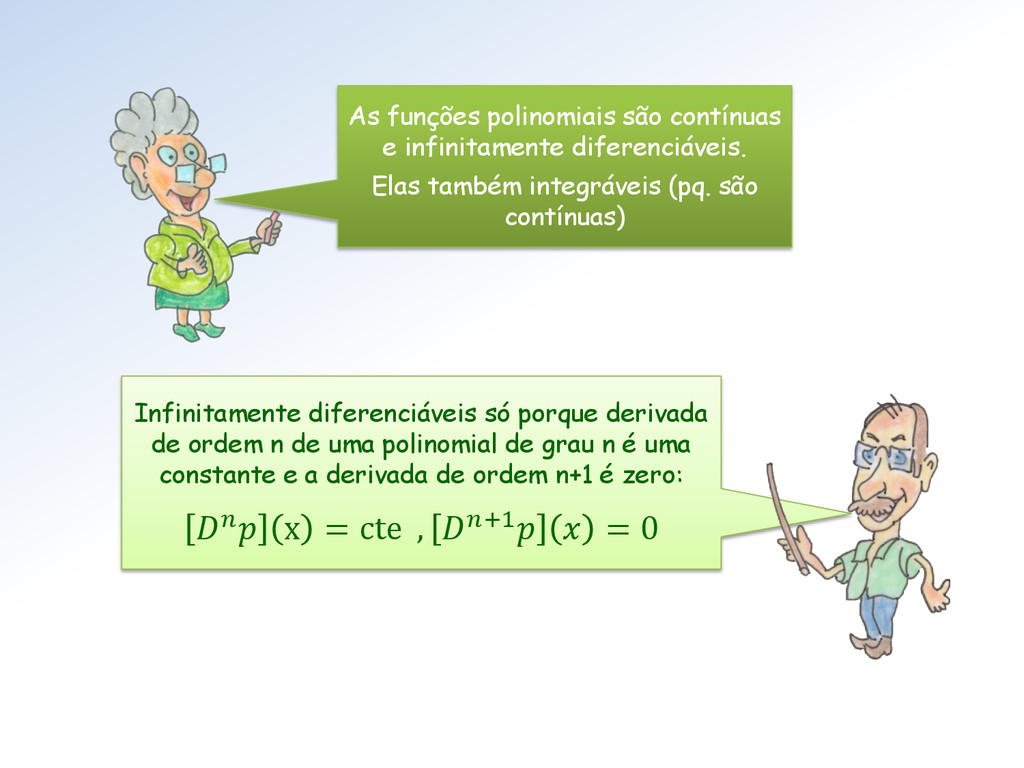
integráveis (pq. são contínuas) Infinitamente diferenciáveis só porque derivada de ordem n de uma polinomial de grau n é uma constante e a derivada de ordem n+1 é zero: x = cte , +1 = 0
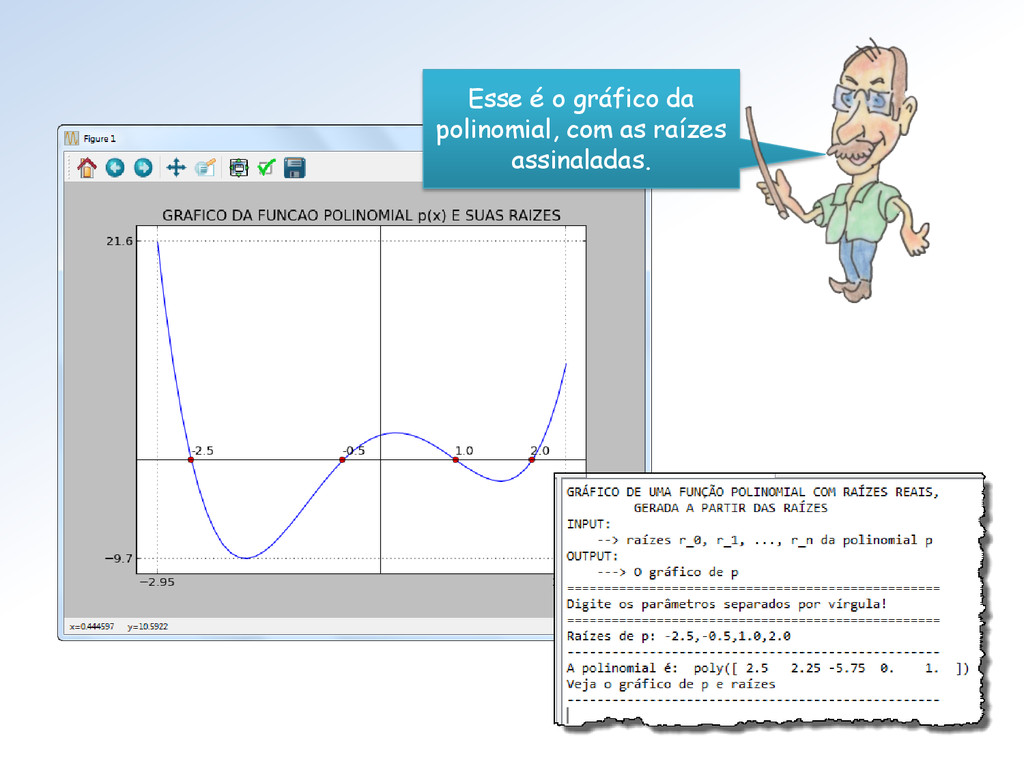
2 − 3 Obteremos, obviamente, uma polinomial de grau 4 em x, cujas raízes são 0 , 1 , 2 , 3 . Essa polinomial terá a forma padrão 4 4 + 3 32 21 x + 0 , 4 = 1, cujos coeficientes são obtidos, com um bocado de algebrismo, a partir das raízes.
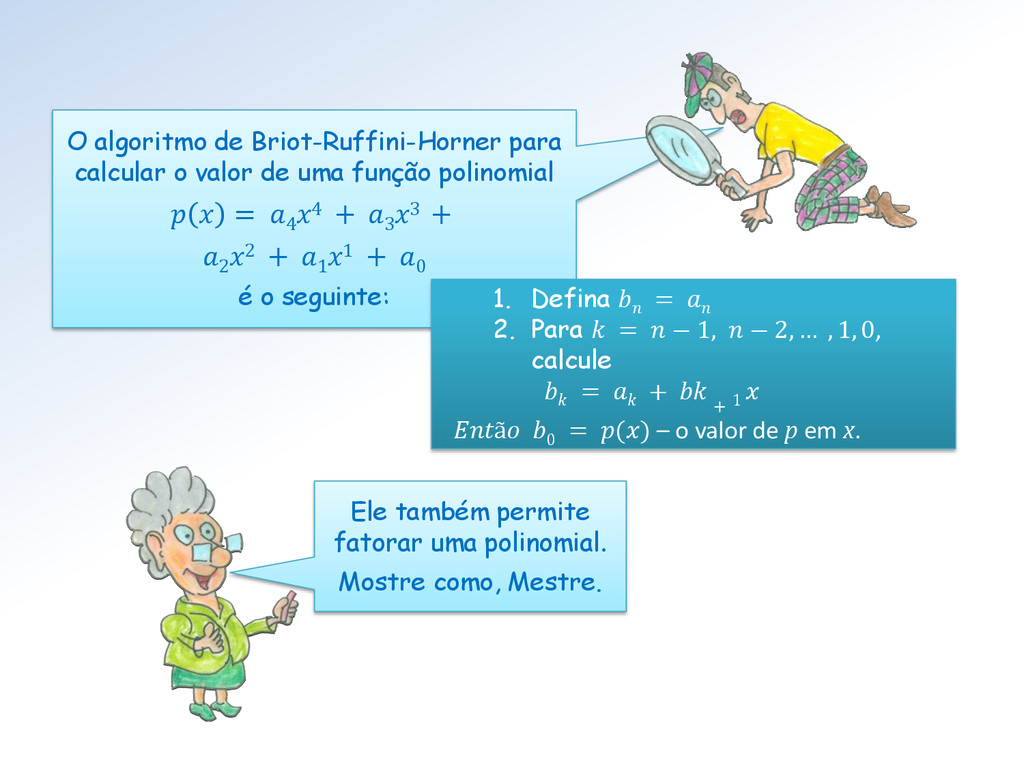
função polinomial = 4 4 + 3 3 + 2 2 + 1 1 + 0 é o seguinte: Ele também permite fatorar uma polinomial. Mostre como, Mestre. 1. Defina = 2. Para = − 1, − 2, … , 1, 0, calcule = + + 1 ã 0 = () – o valor de p em x.
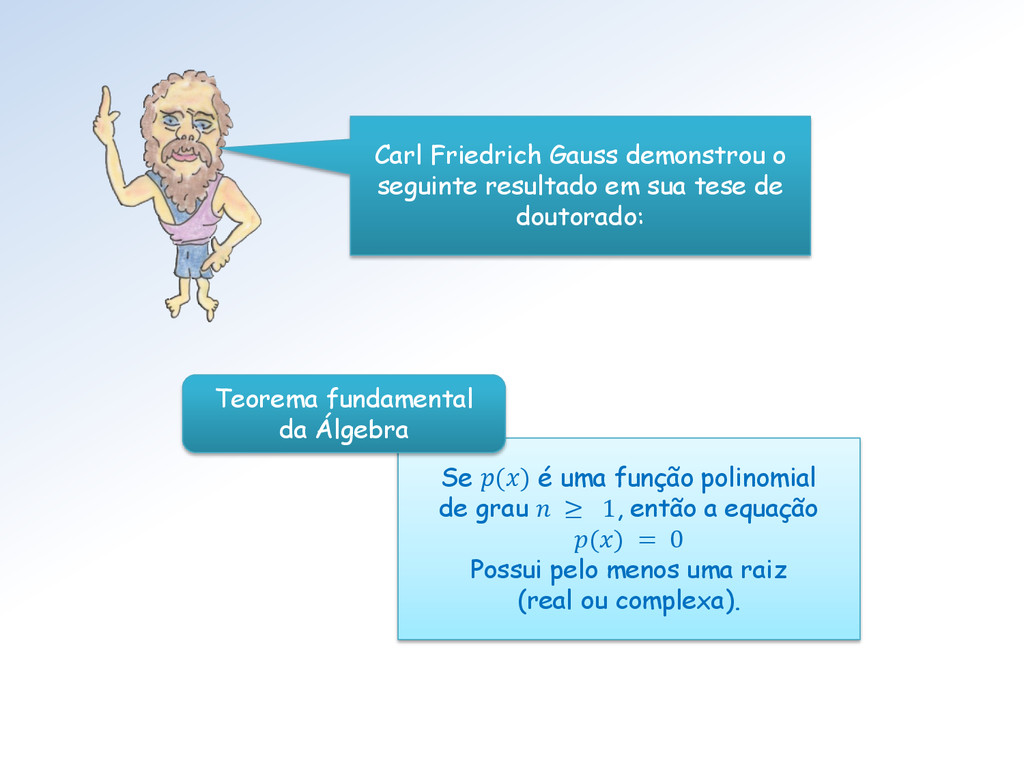
de doutorado: Se () é uma função polinomial de grau ≥ 1, então a equação () = 0 Possui pelo menos uma raiz (real ou complexa). Teorema fundamental da Álgebra
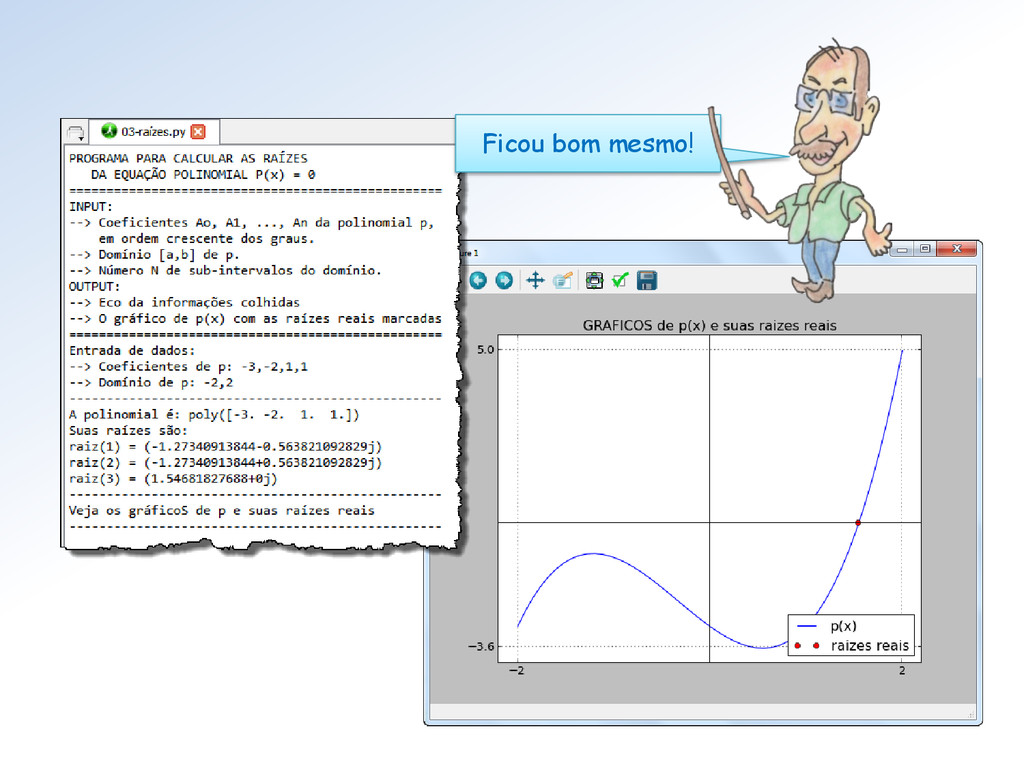
sua complexa conjugada), se o grau da polinomial é ímpar com certeza ela possui uma raiz real. Segue do Teorema fundamental da Álgebra que: uma função polinomial = () de grau n possui n raízes reais ou complexas.
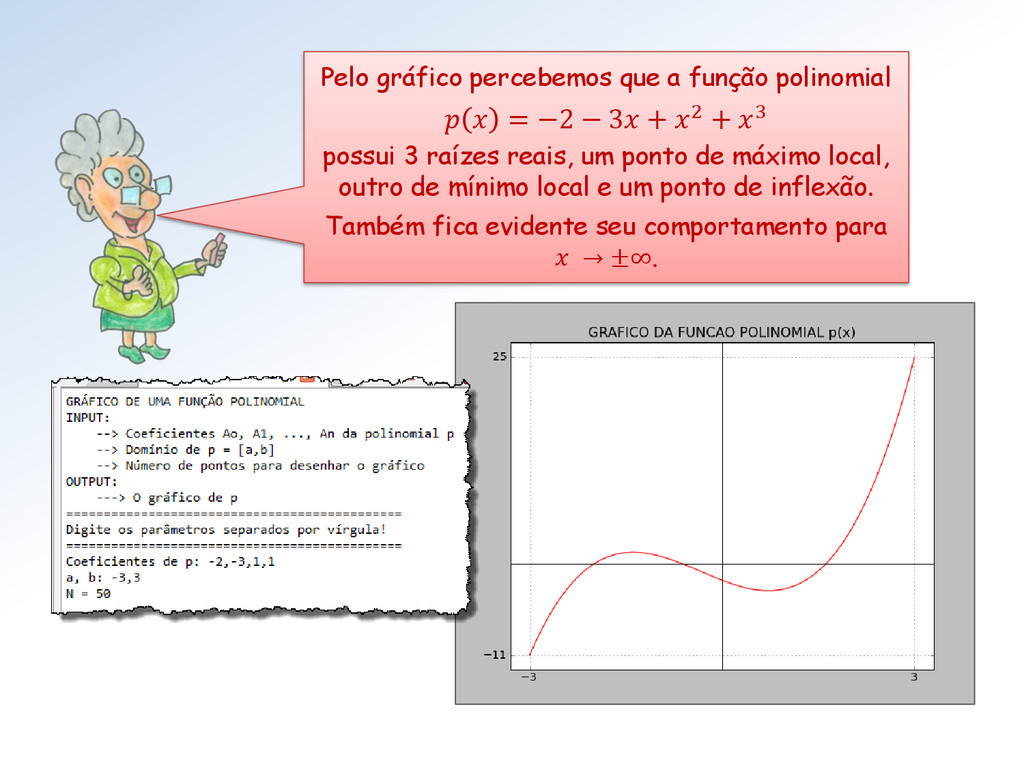
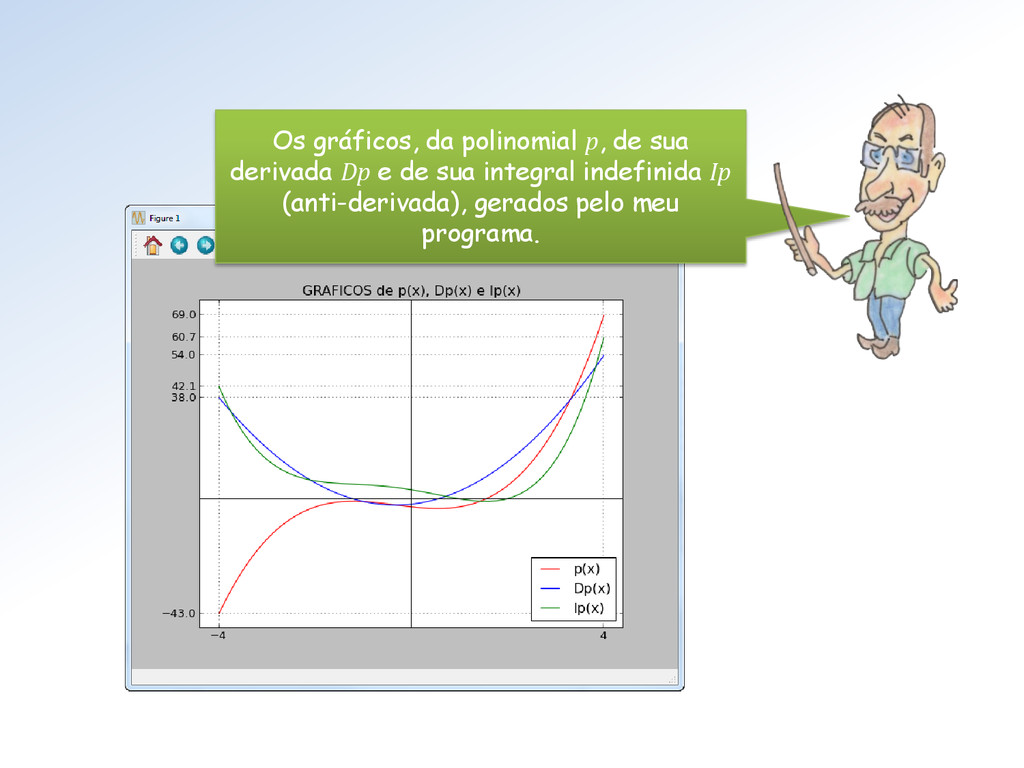
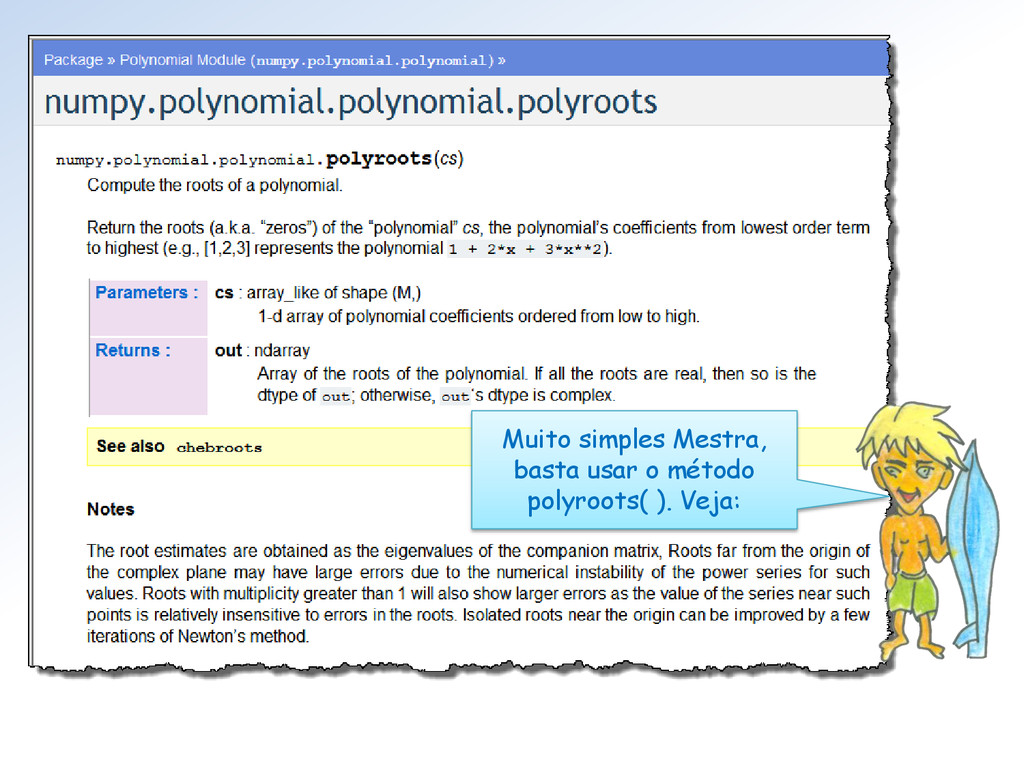
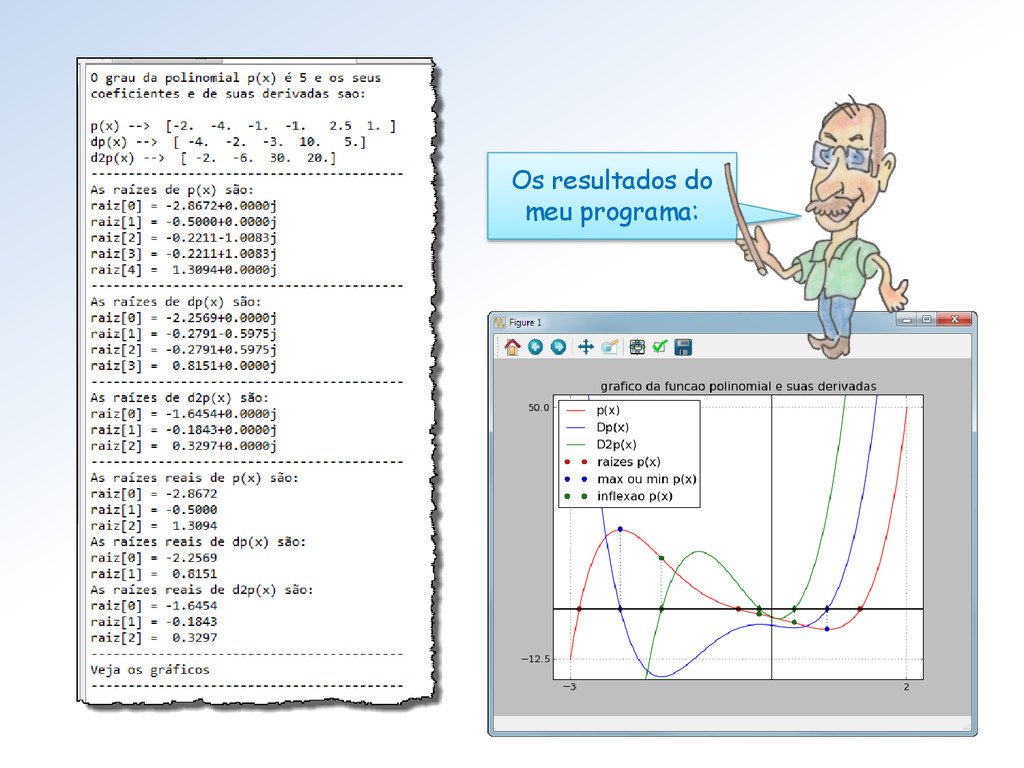
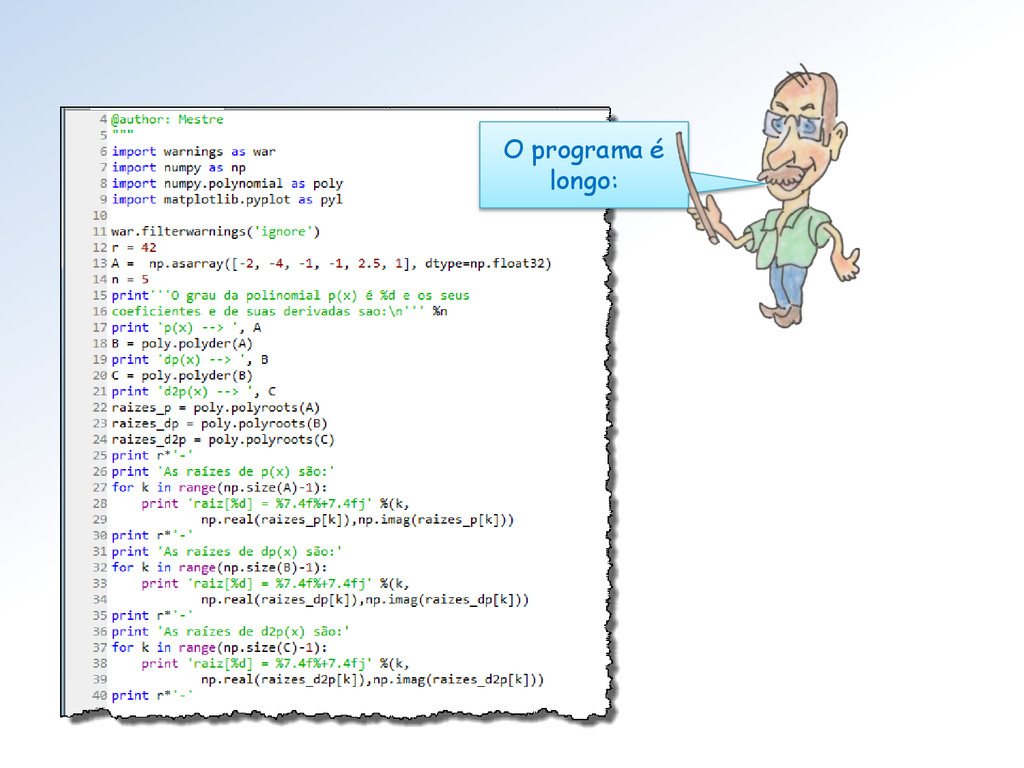
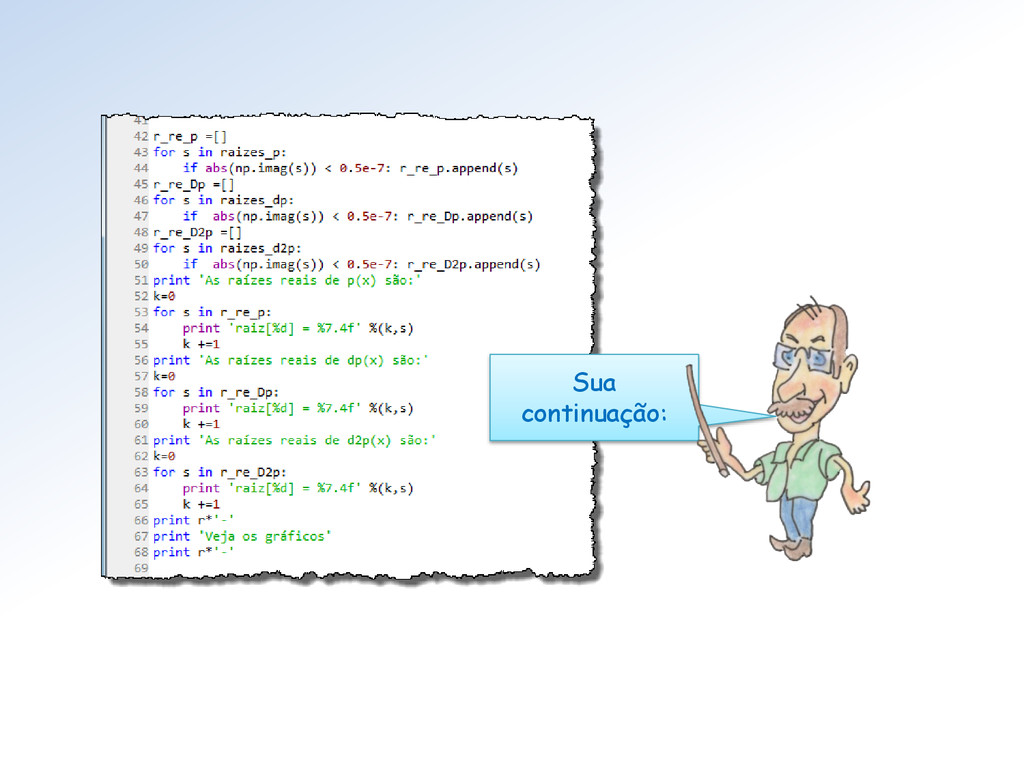
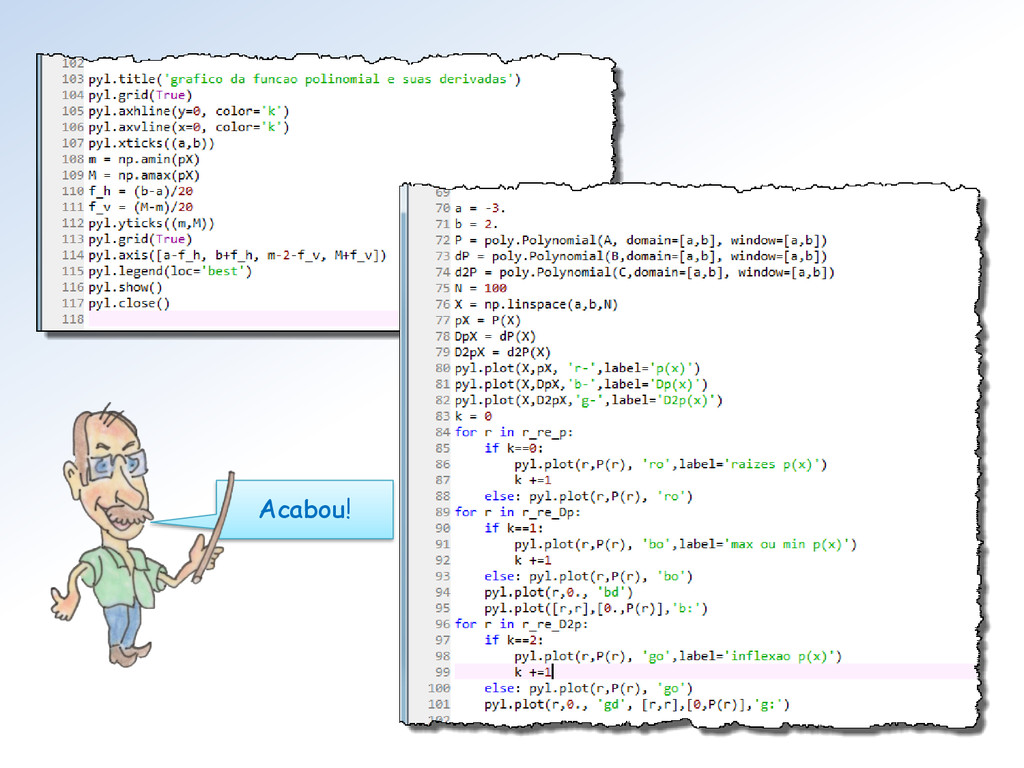
não apenas para equações polinomiais. O polyroots é específico para polinomiais. O Mestre fez um programa para mostrar o gráfico de uma polinomial () e assinalar seus pontos de máximo, mínimo e inflexão. Mostra também os gráficos das derivadas de ordem 1 e 2 da ().
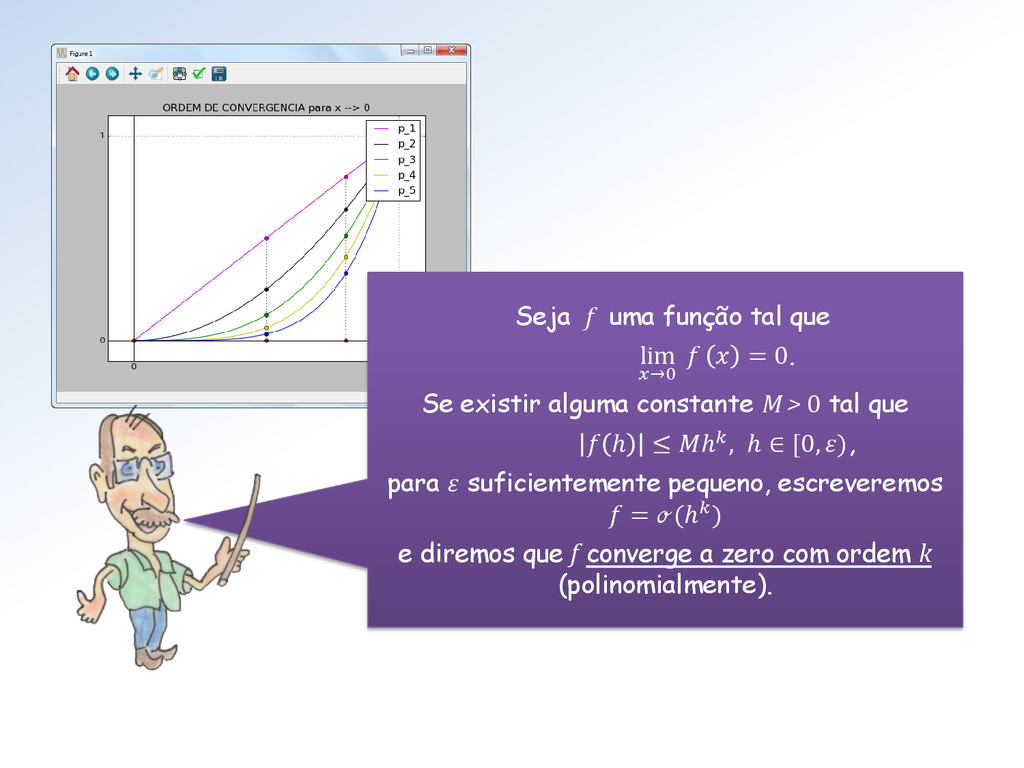
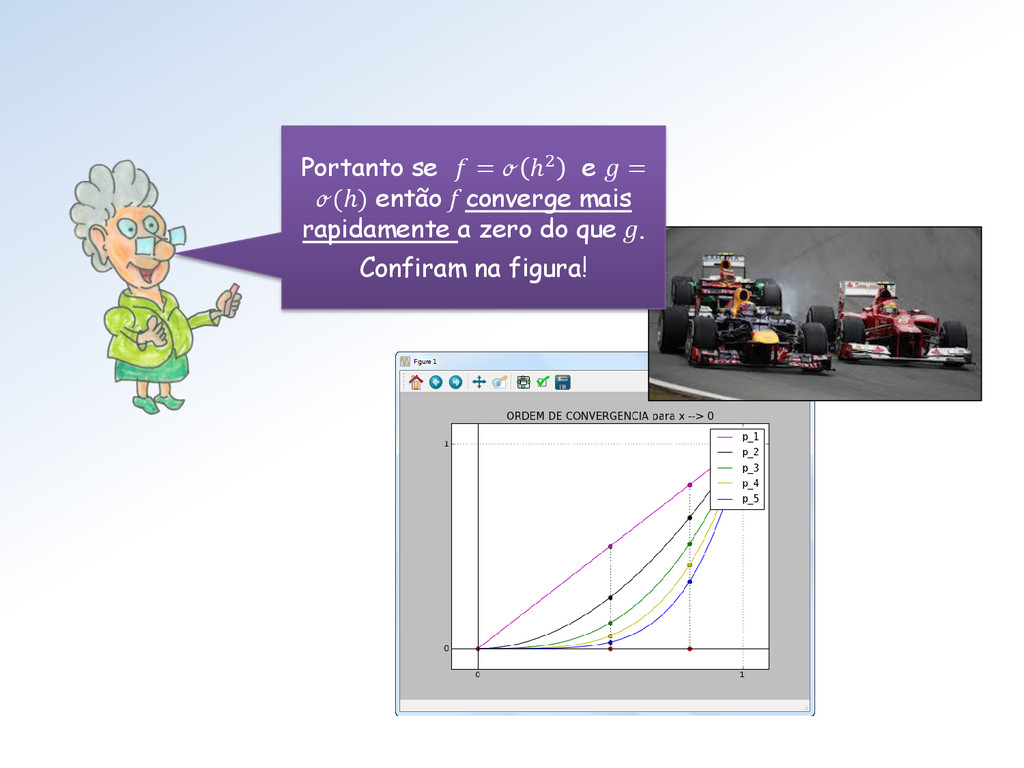
Se existir alguma constante M > 0 tal que ℎ ≤ ℎ, ℎ ∈ [0, ), para suficientemente pequeno, escreveremos = ℴ(ℎ) e diremos que f converge a zero com ordem k (polinomialmente).
das polinomiais. Elas surgem de forma natural na resolução, por separação de variáveis, de problemas de valor de contorno onde o domínio apresenta algum tipo de simetria. Infelizmente, em nosso curso, não teremos oportunidade de trabalhar com esses problemas.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Algumas funções do conjunto ℱ(, ℝ), quando = [−1,1].](https://files.speakerdeck.com/presentations/0a1ac8f0515c013261a606fa84ad753a/slide_11.jpg){kind=link}
![O programa que mostra alguns vetores de ℱ([−1, 1], ℝ).](https://files.speakerdeck.com/presentations/0a1ac8f0515c013261a606fa84ad753a/slide_12.jpg){kind=link}
{kind=link}
{kind=link}
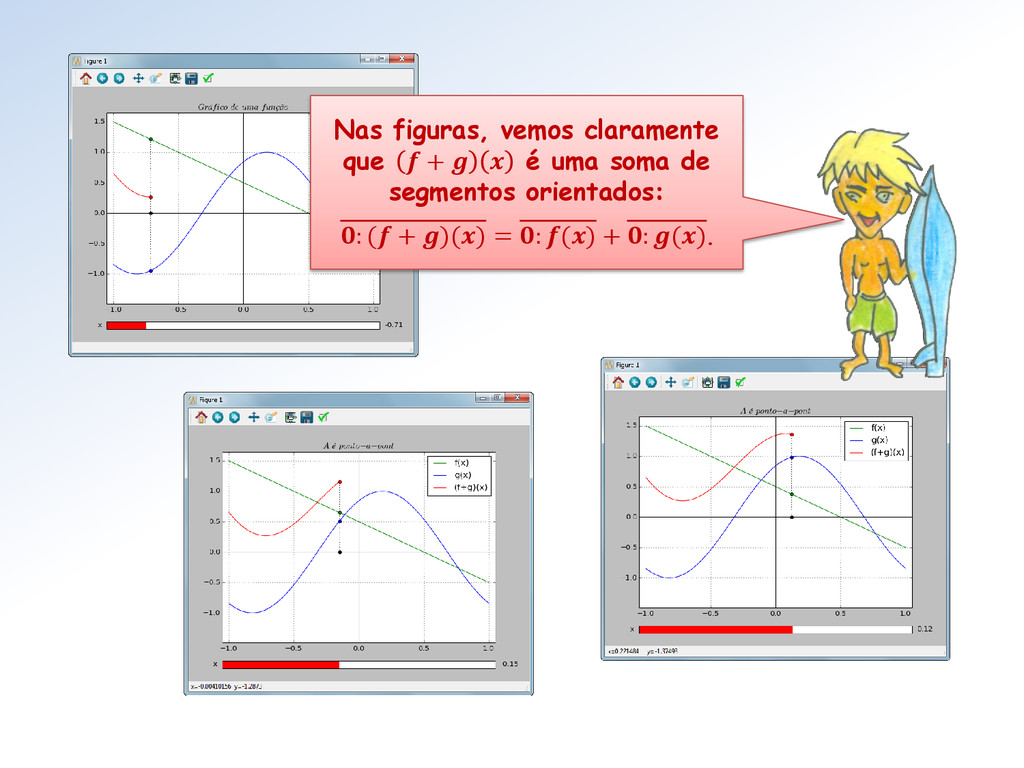
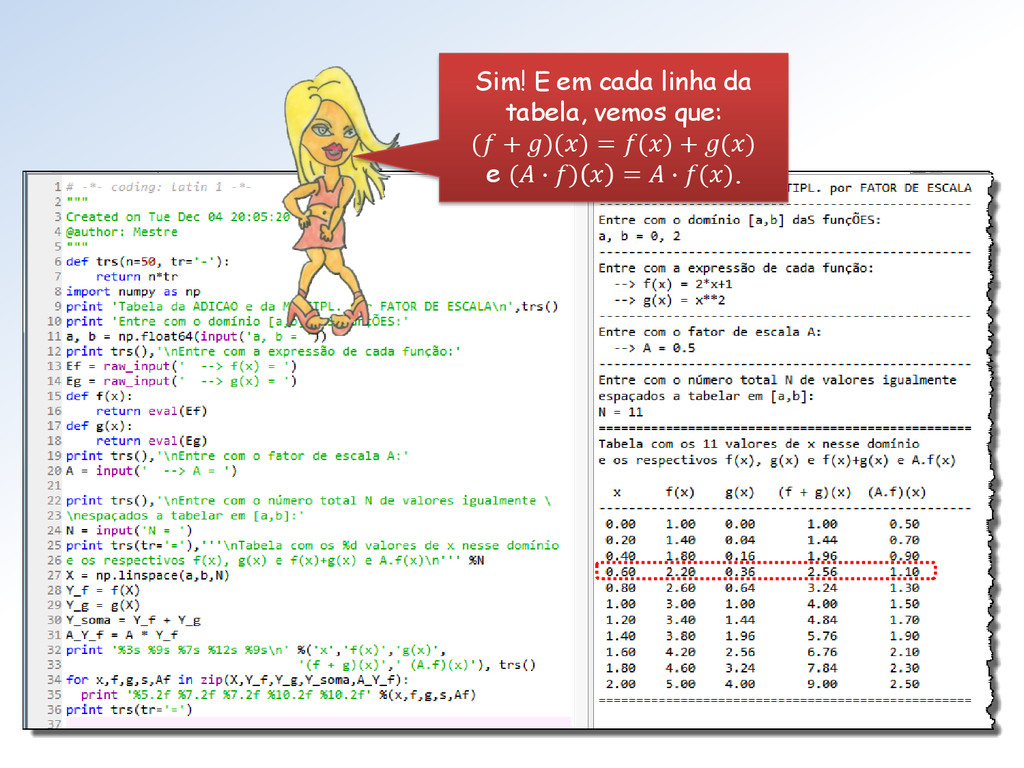
![Mestre, escolha = [, ] e mostre a soma e](https://files.speakerdeck.com/presentations/0a1ac8f0515c013261a606fa84ad753a/slide_15.jpg){kind=link}
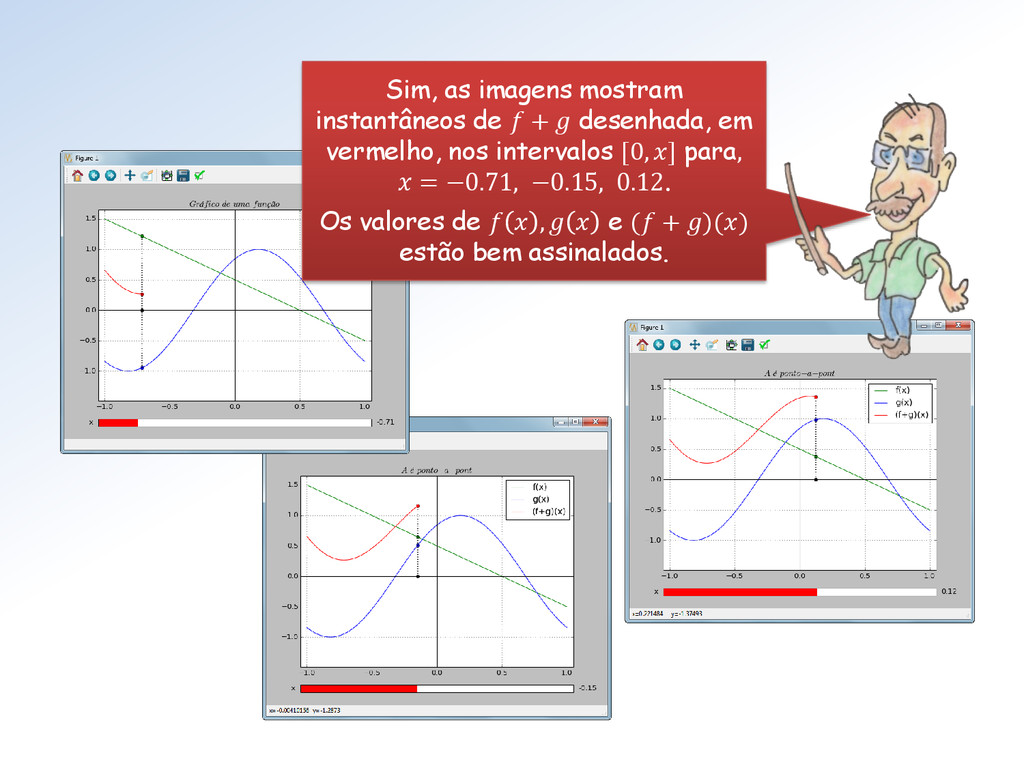
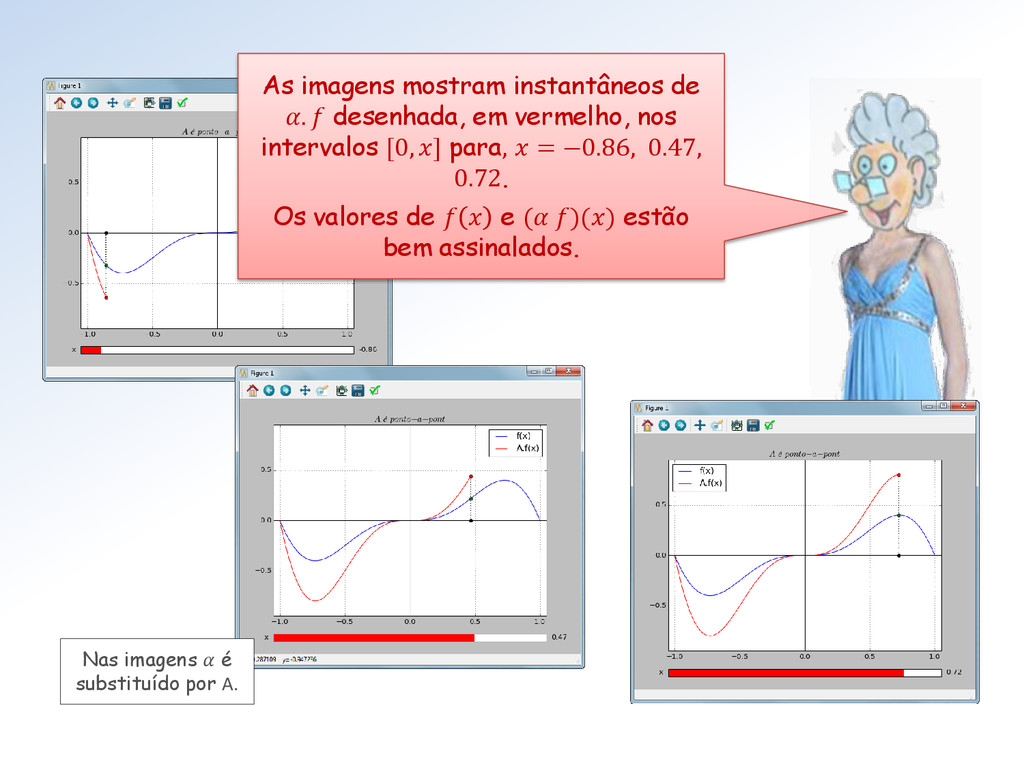
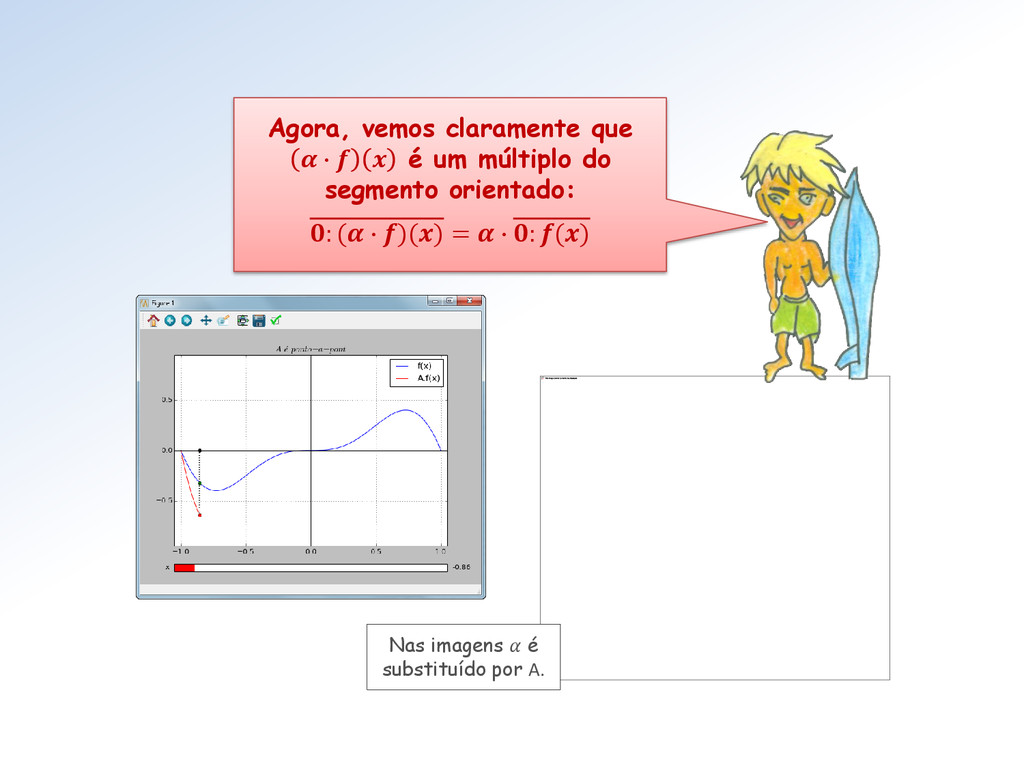
![Observem que para cada ponto x em [0 ,1], a](https://files.speakerdeck.com/presentations/0a1ac8f0515c013261a606fa84ad753a/slide_16.jpg){kind=link}
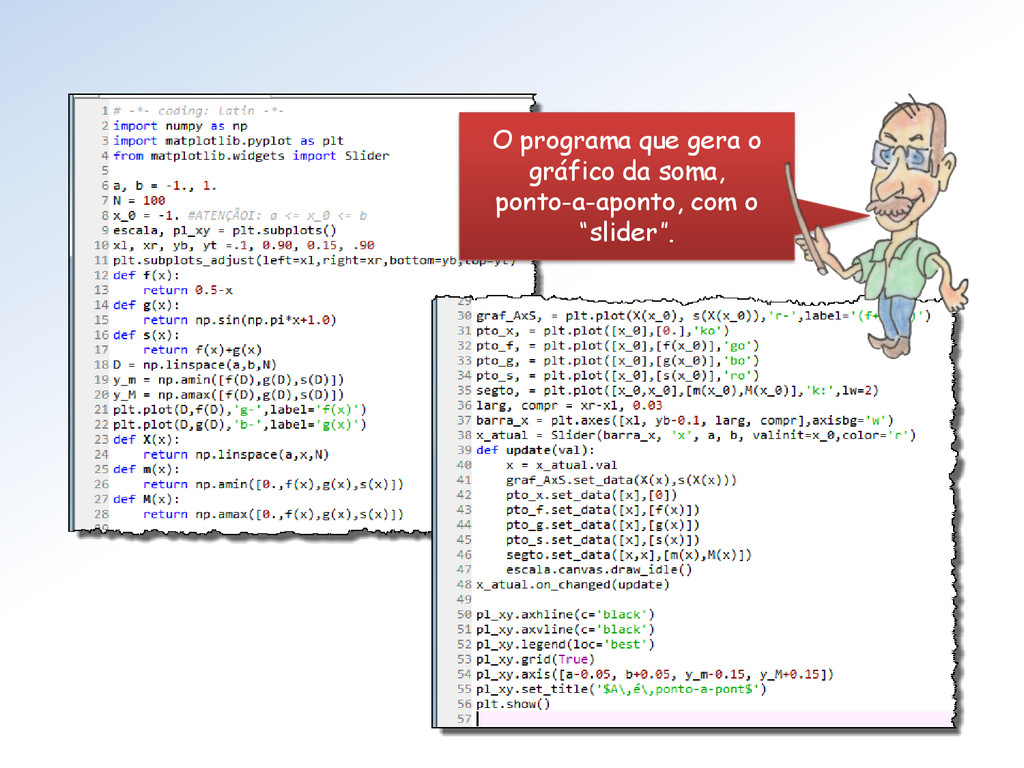
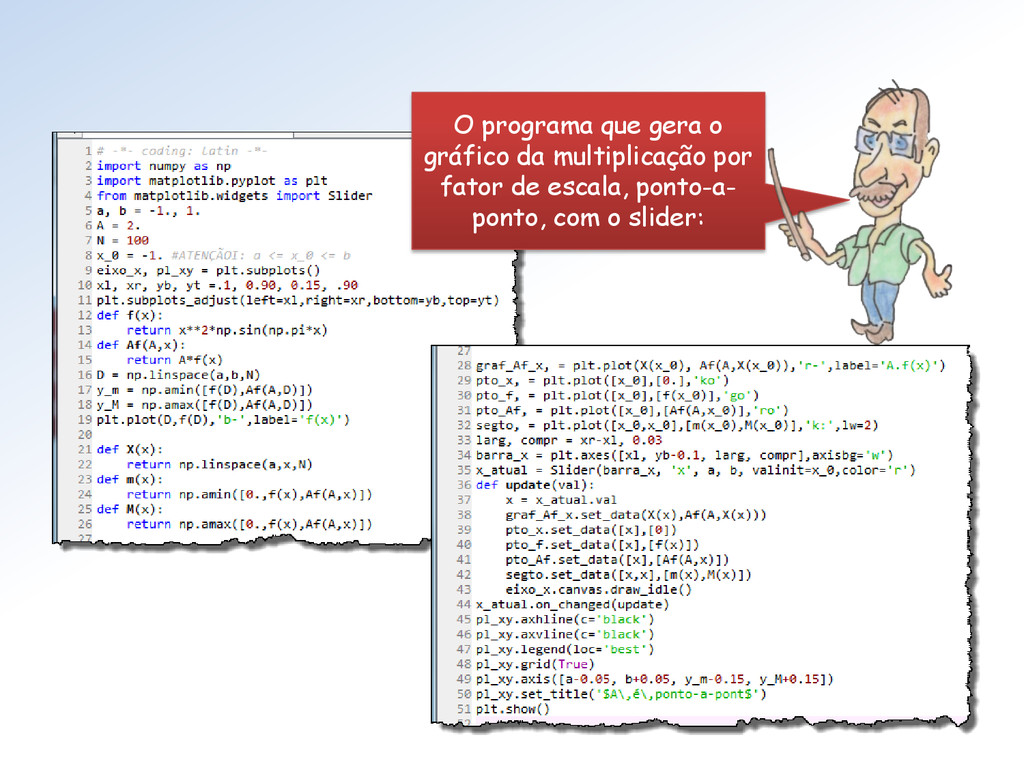
![Aqui estamos pedindo o intervalo [a, b] e gerando o](https://files.speakerdeck.com/presentations/0a1ac8f0515c013261a606fa84ad753a/slide_17.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Observem que para cada ponto x em [-1 ,1], a](https://files.speakerdeck.com/presentations/0a1ac8f0515c013261a606fa84ad753a/slide_23.jpg){kind=link}
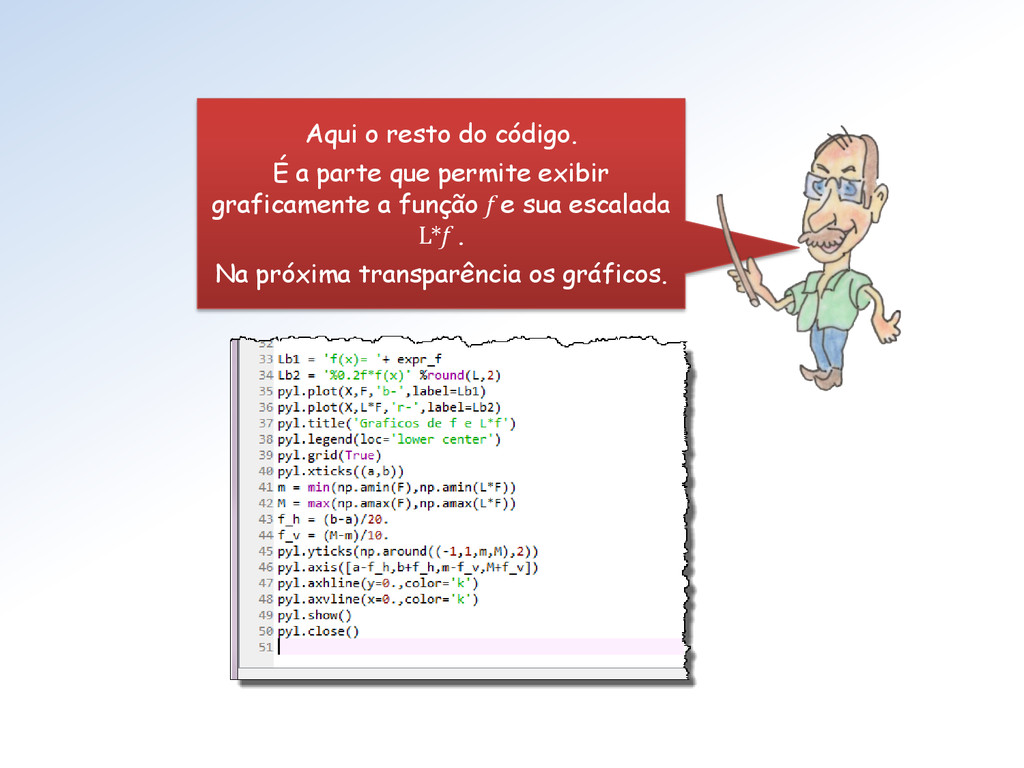
![Aqui estamos pedindo o intervalo [a, b], gerando o código](https://files.speakerdeck.com/presentations/0a1ac8f0515c013261a606fa84ad753a/slide_24.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}