2018 PyCon 分享(https://tw.pycon.org/2018/en-us/events/talk/597109292364988618/)
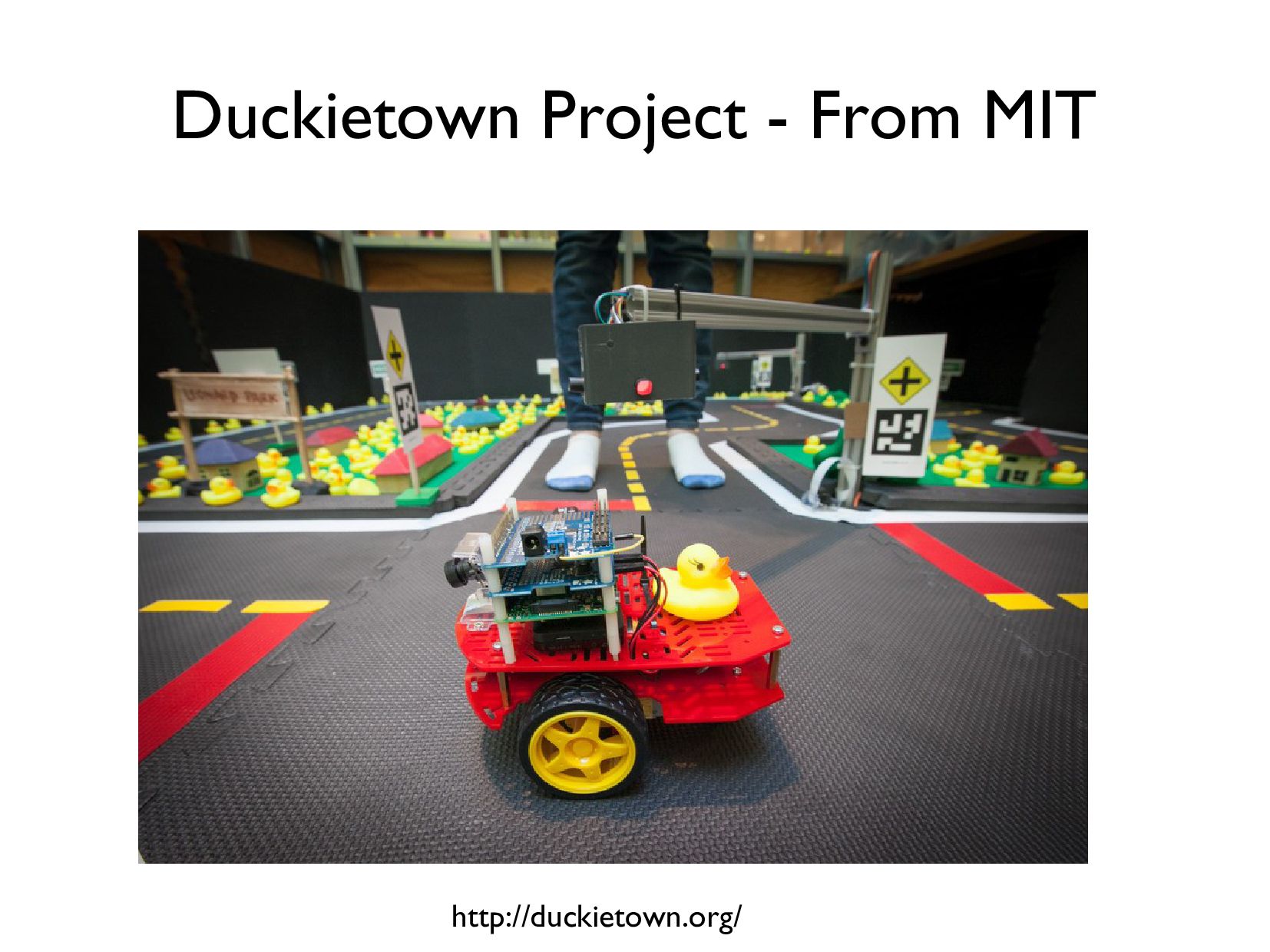
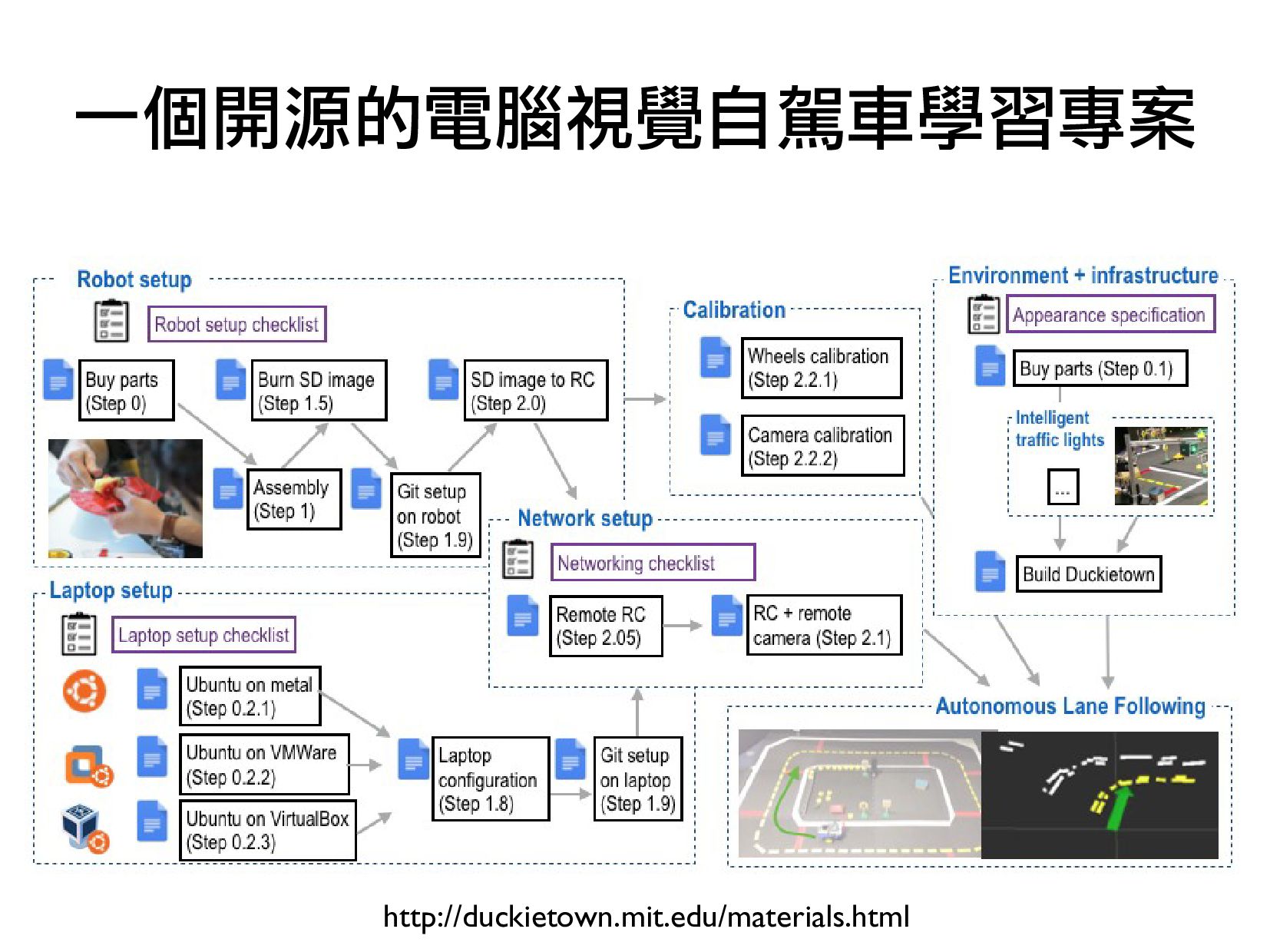
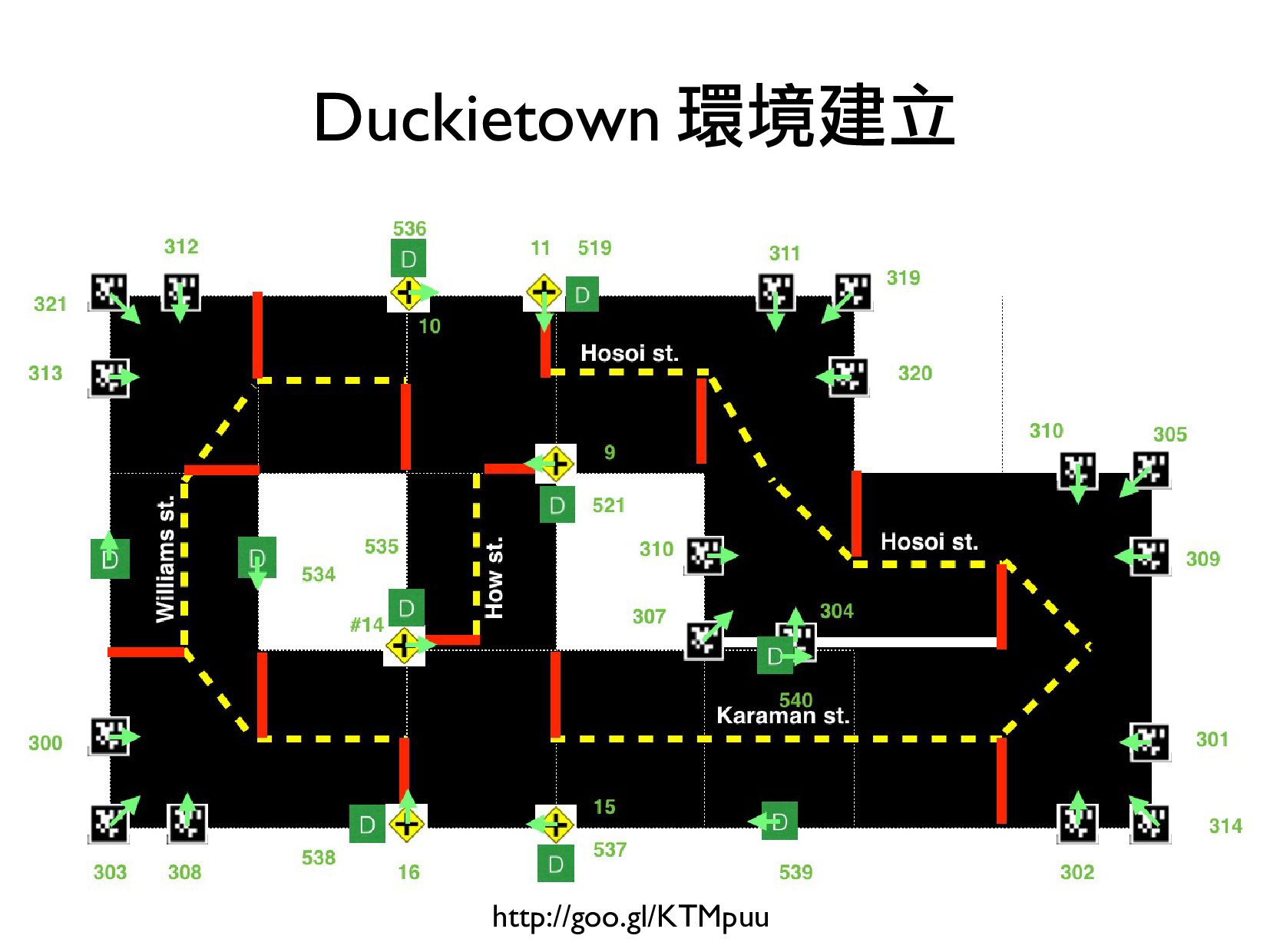
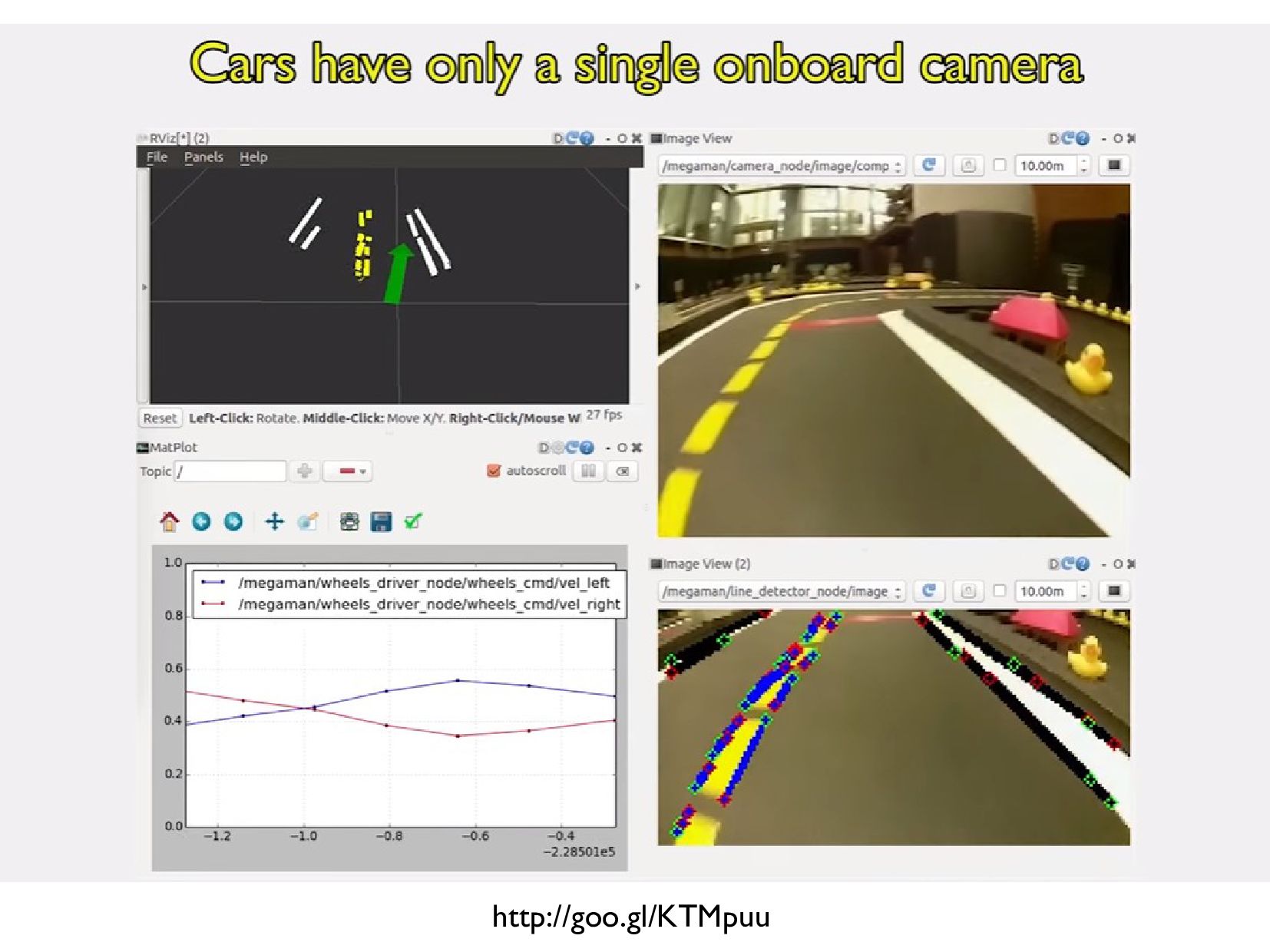
小鴨城(Duckietown),來自於 MIT 的課程,目前在交通大學(NCTU)有課程分支。這是一個開源的電腦視覺自走車學習專案,車上唯一的感測器就是相機。
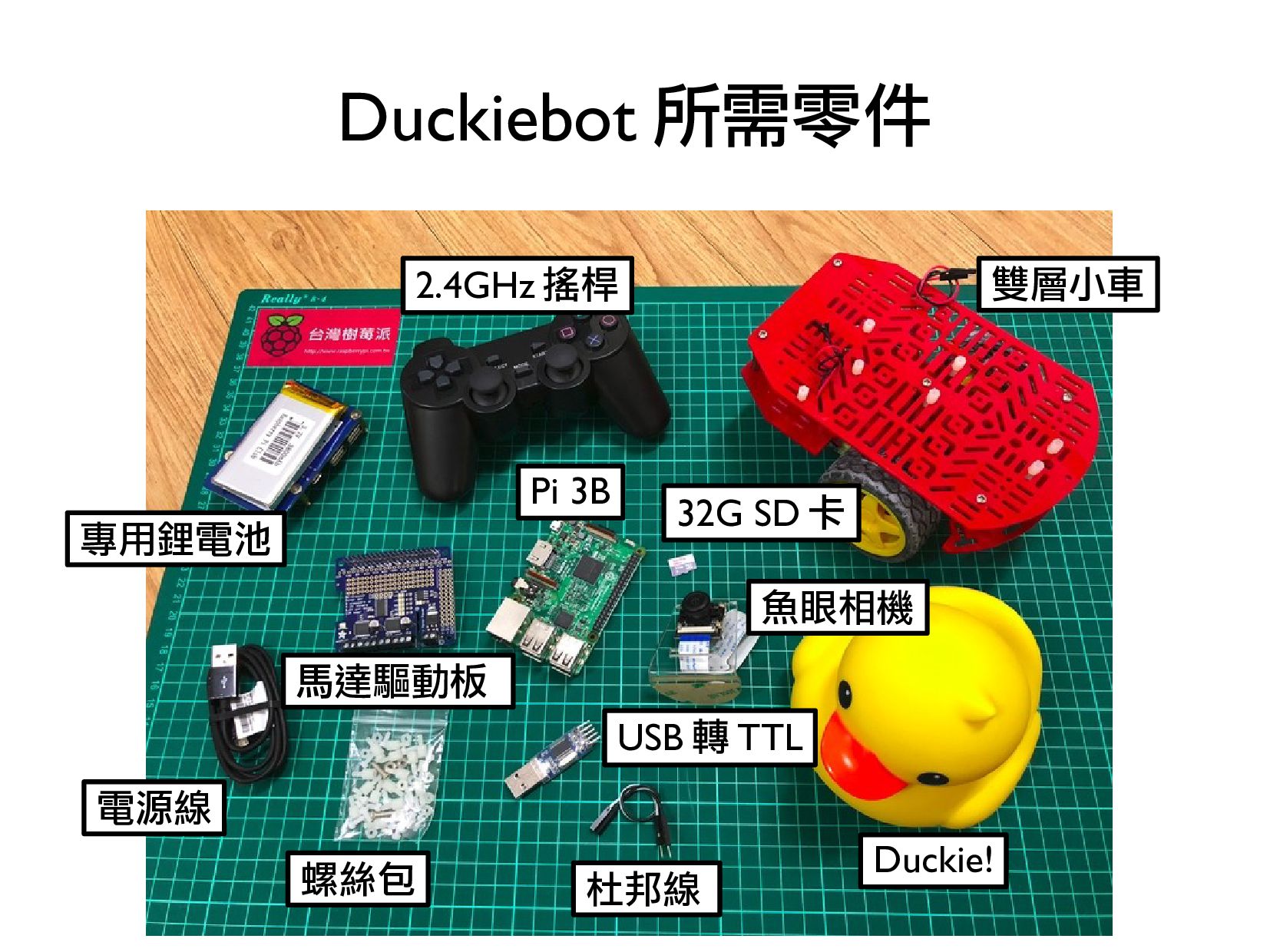
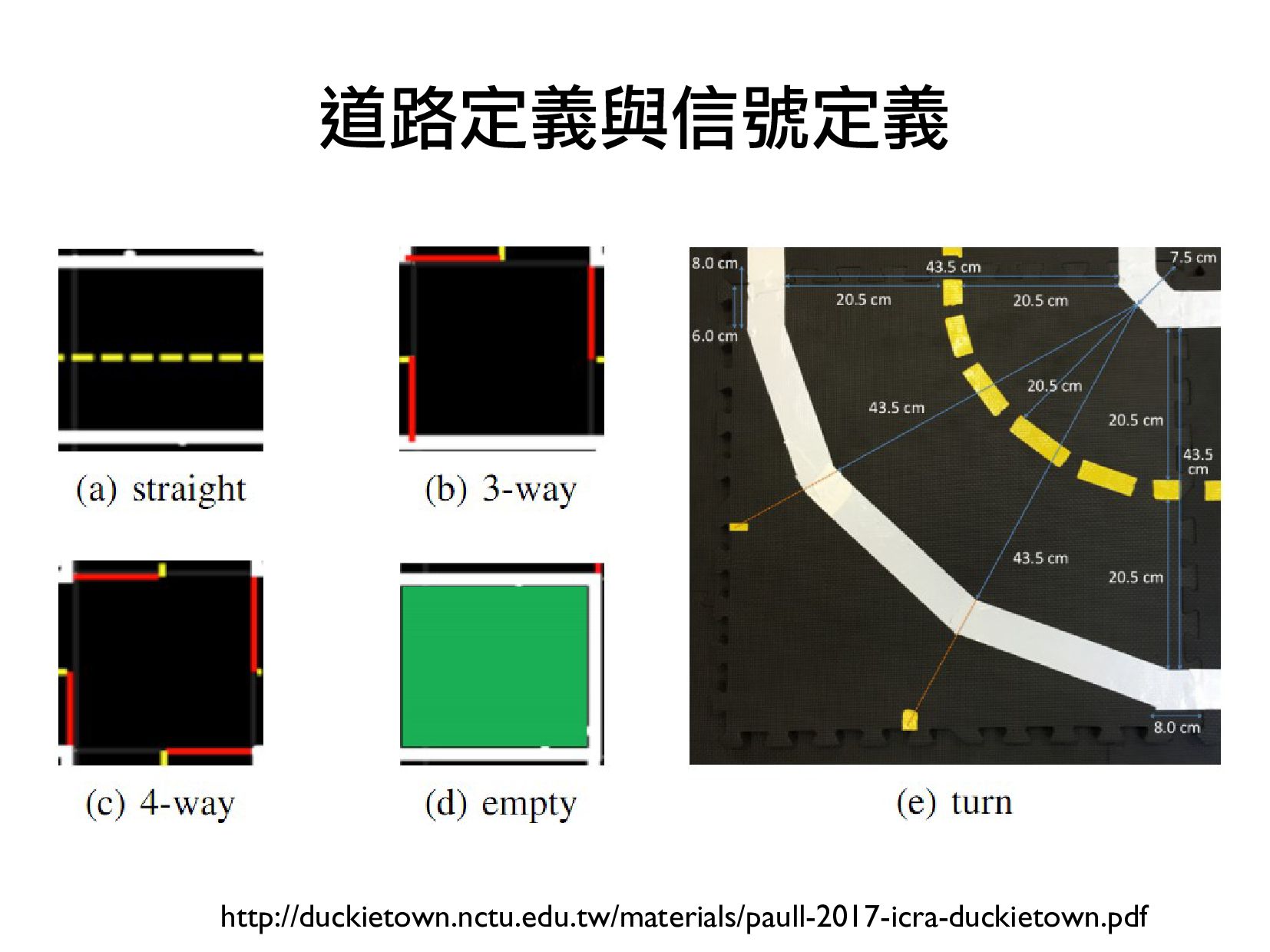
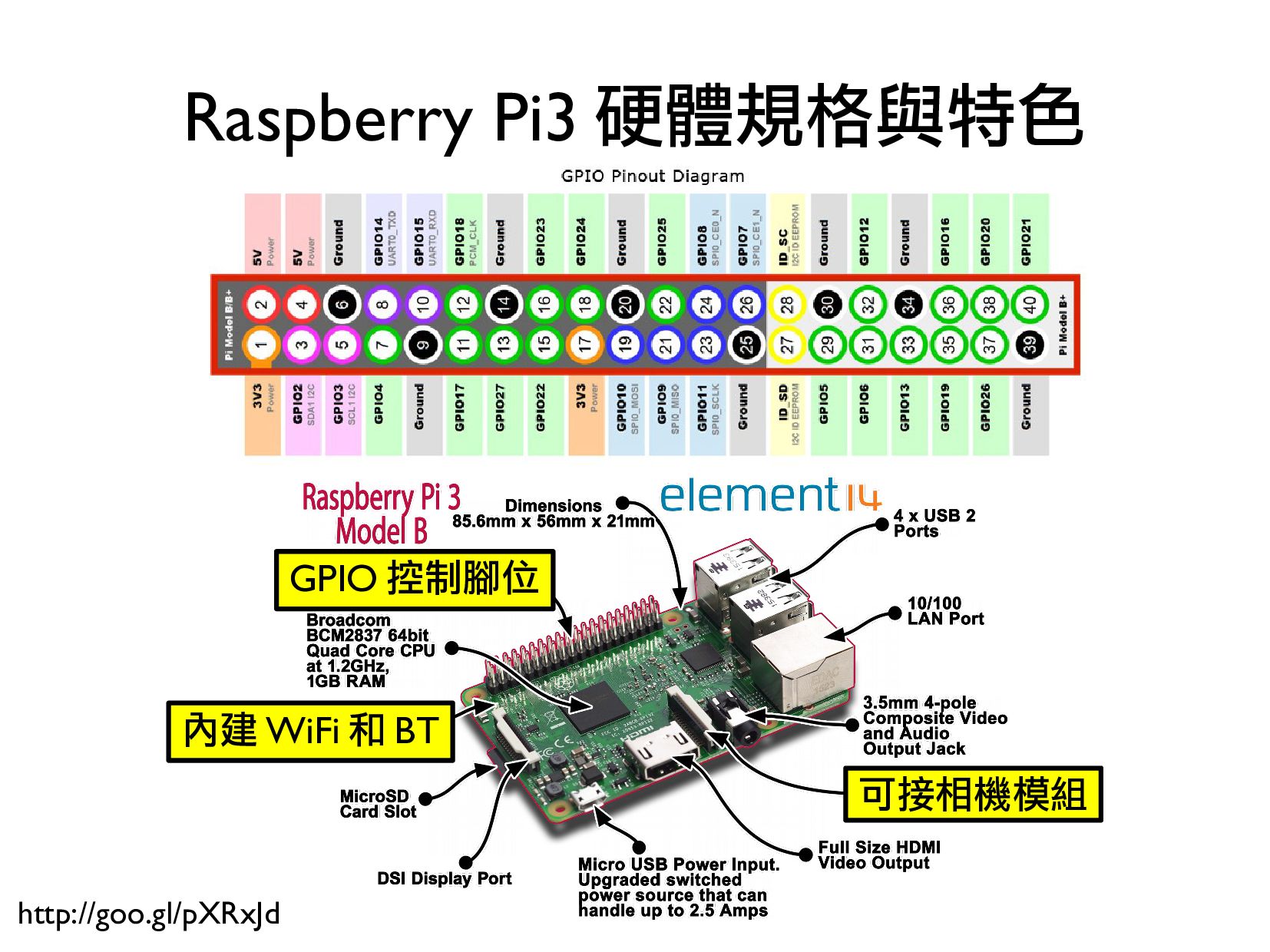
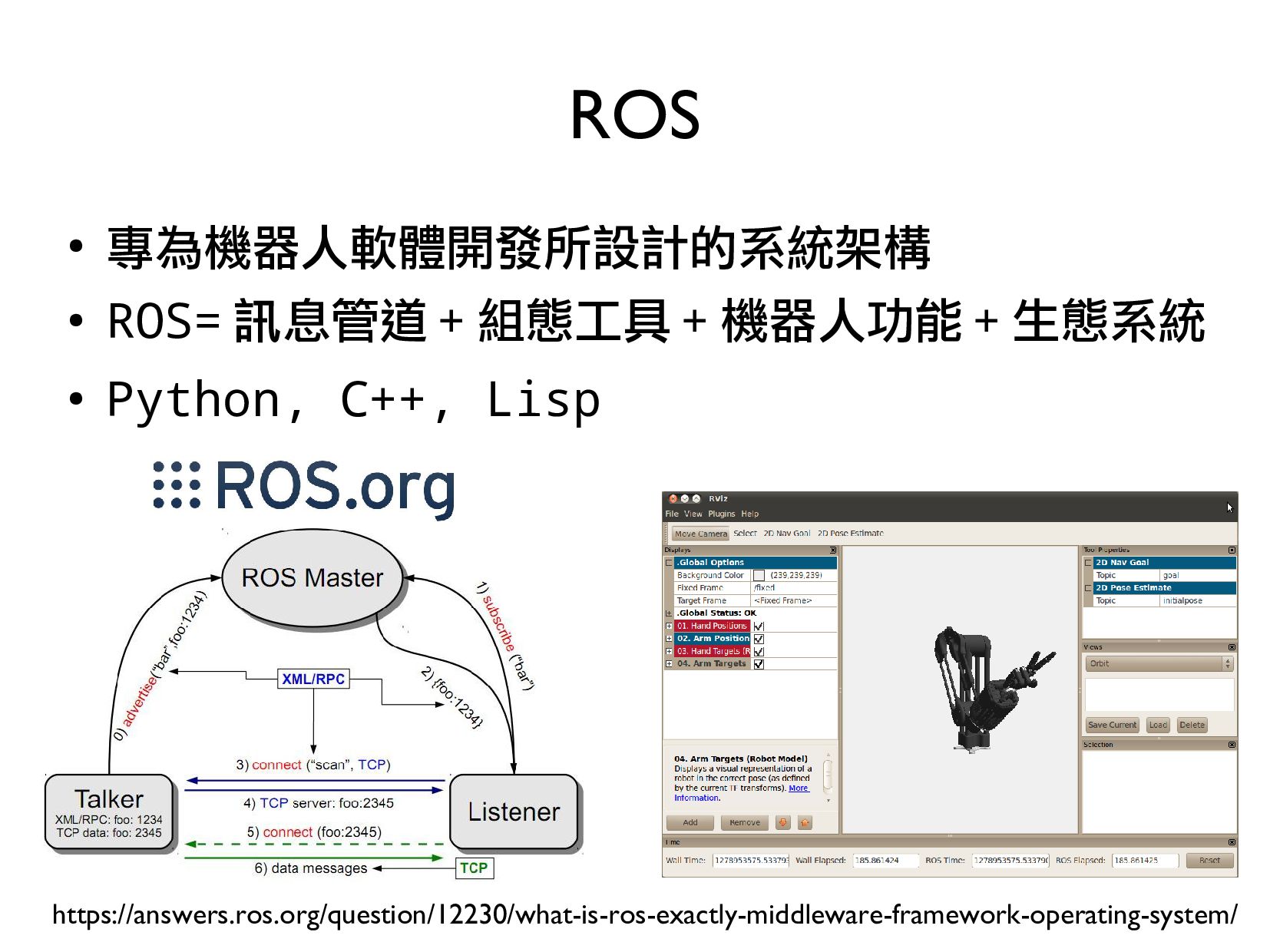
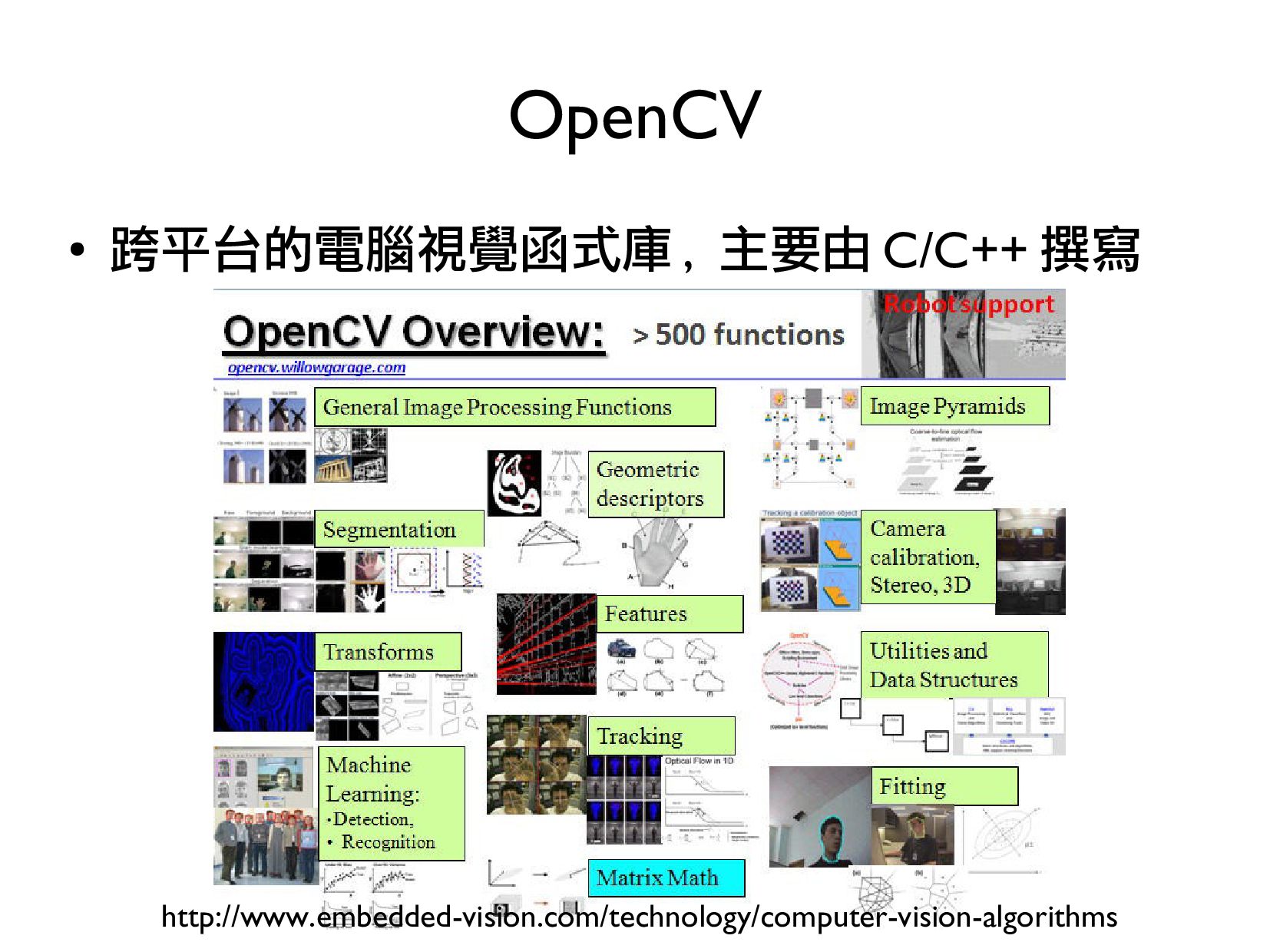
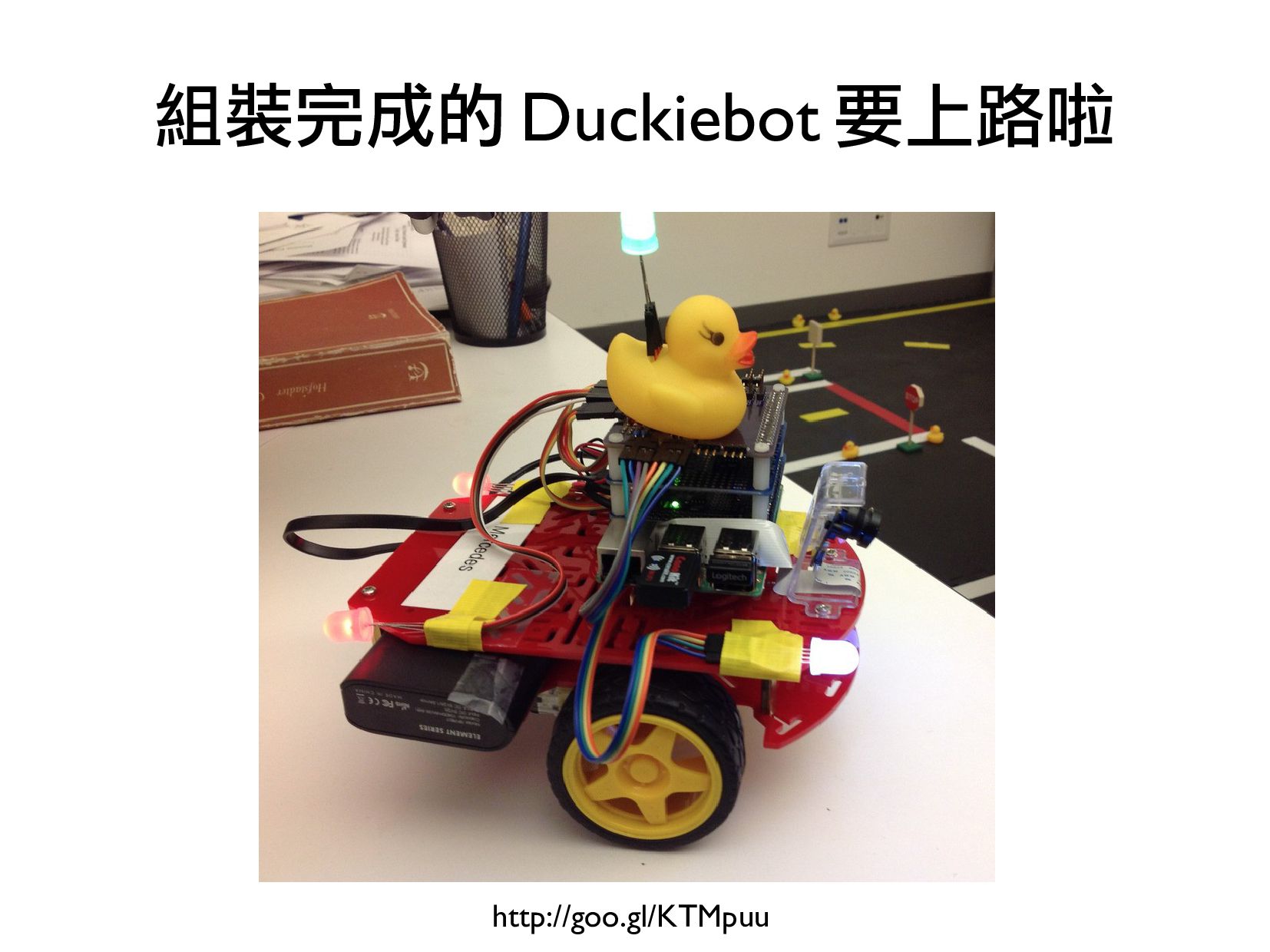
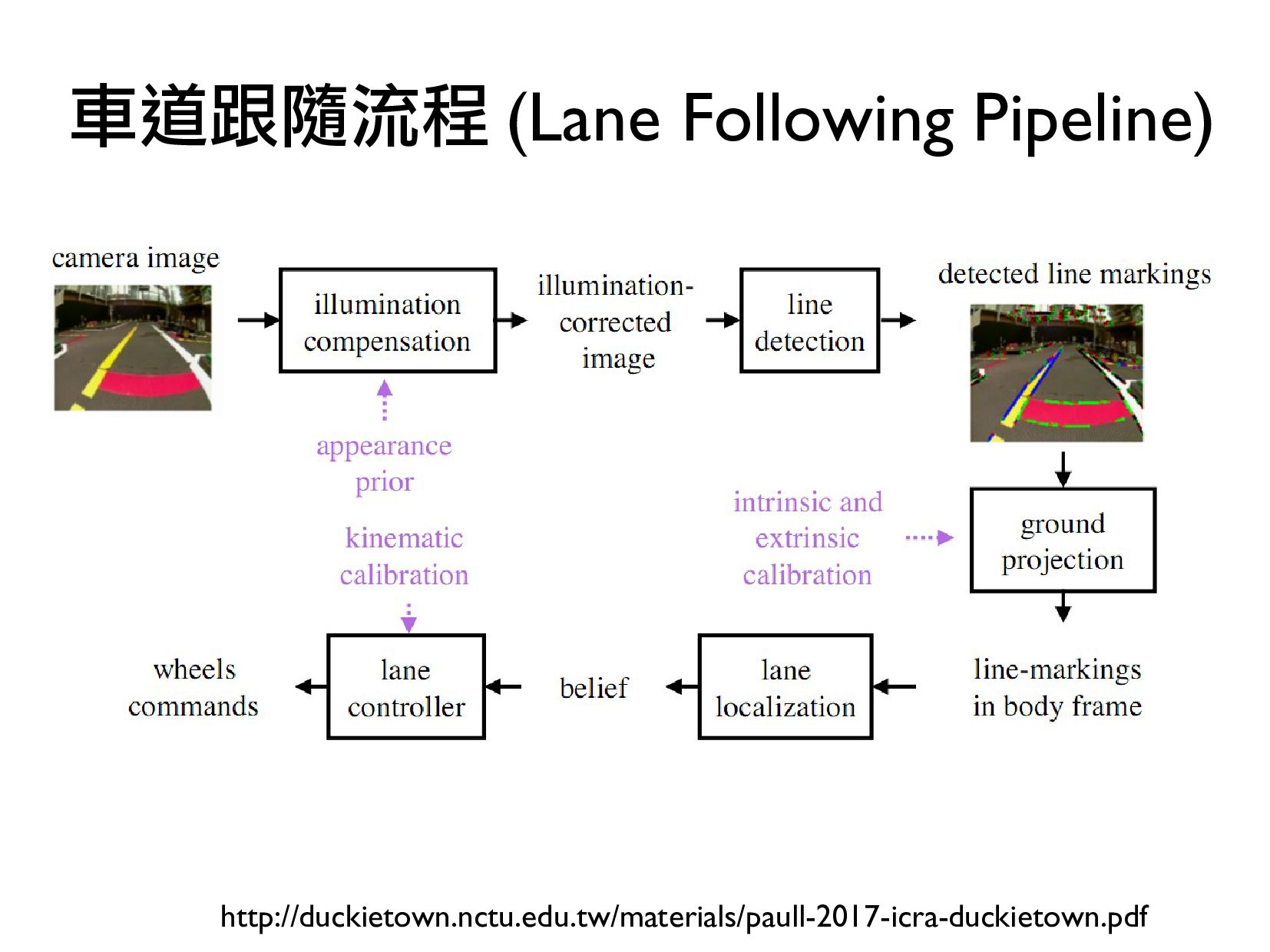
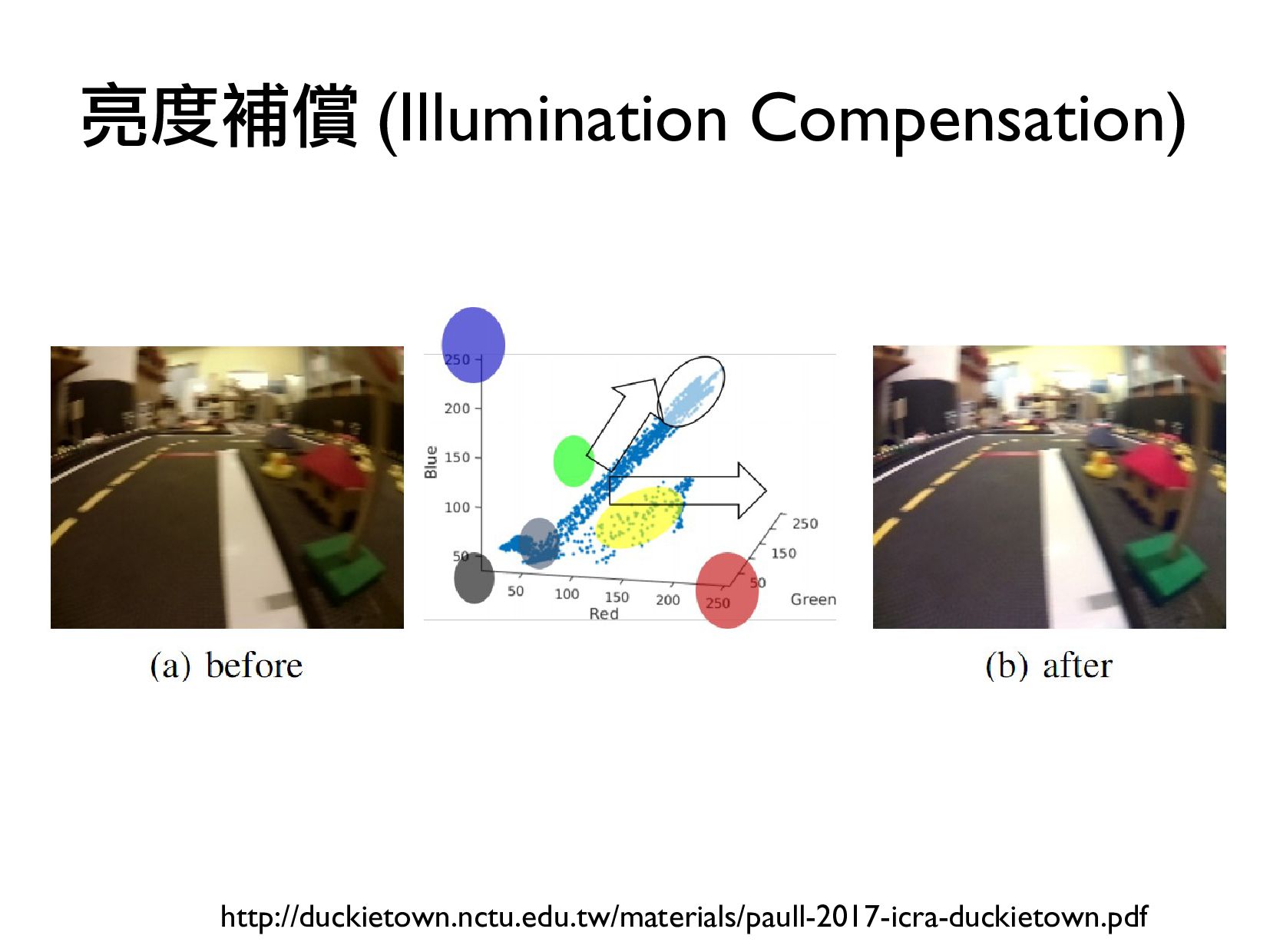
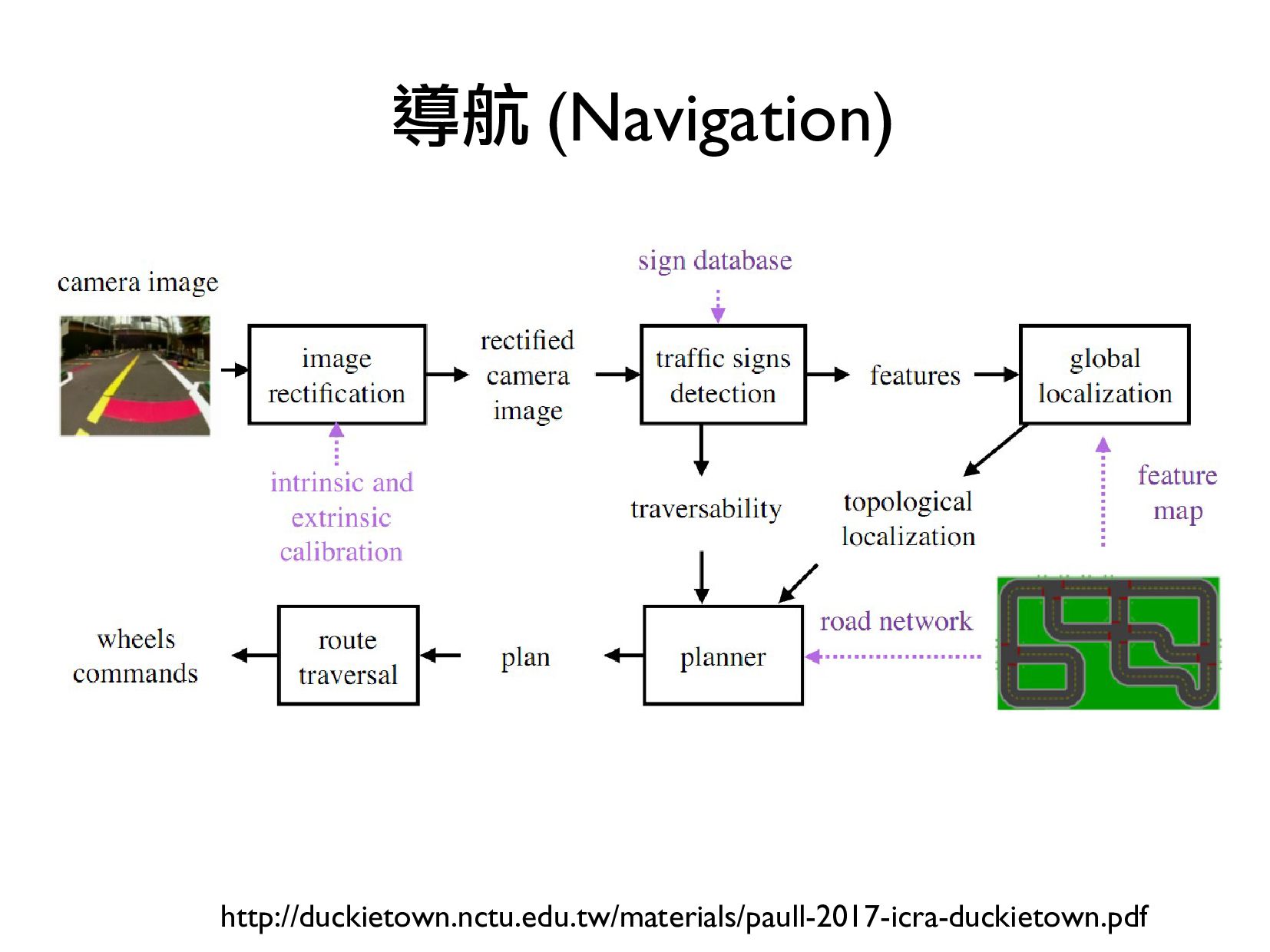
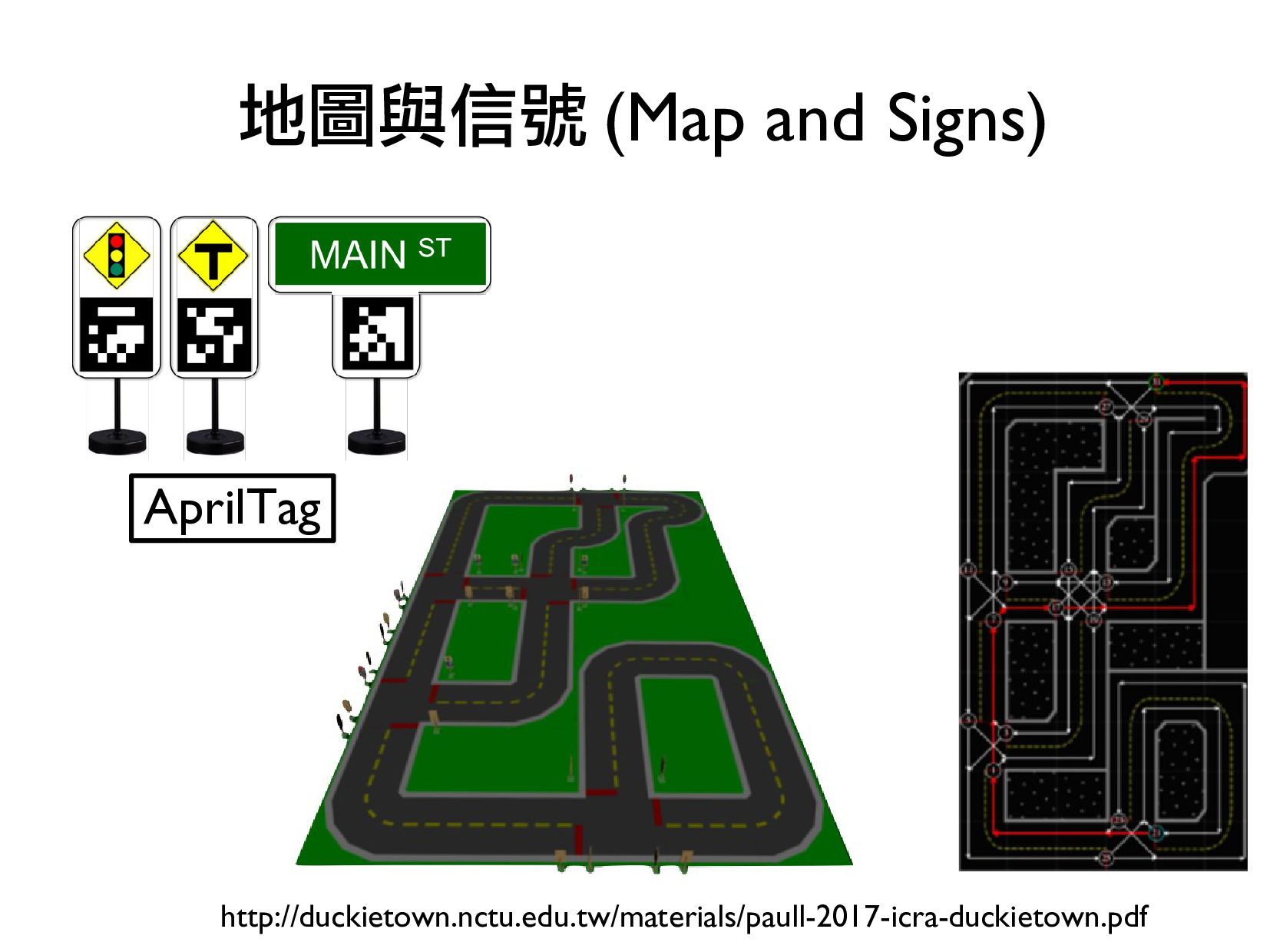
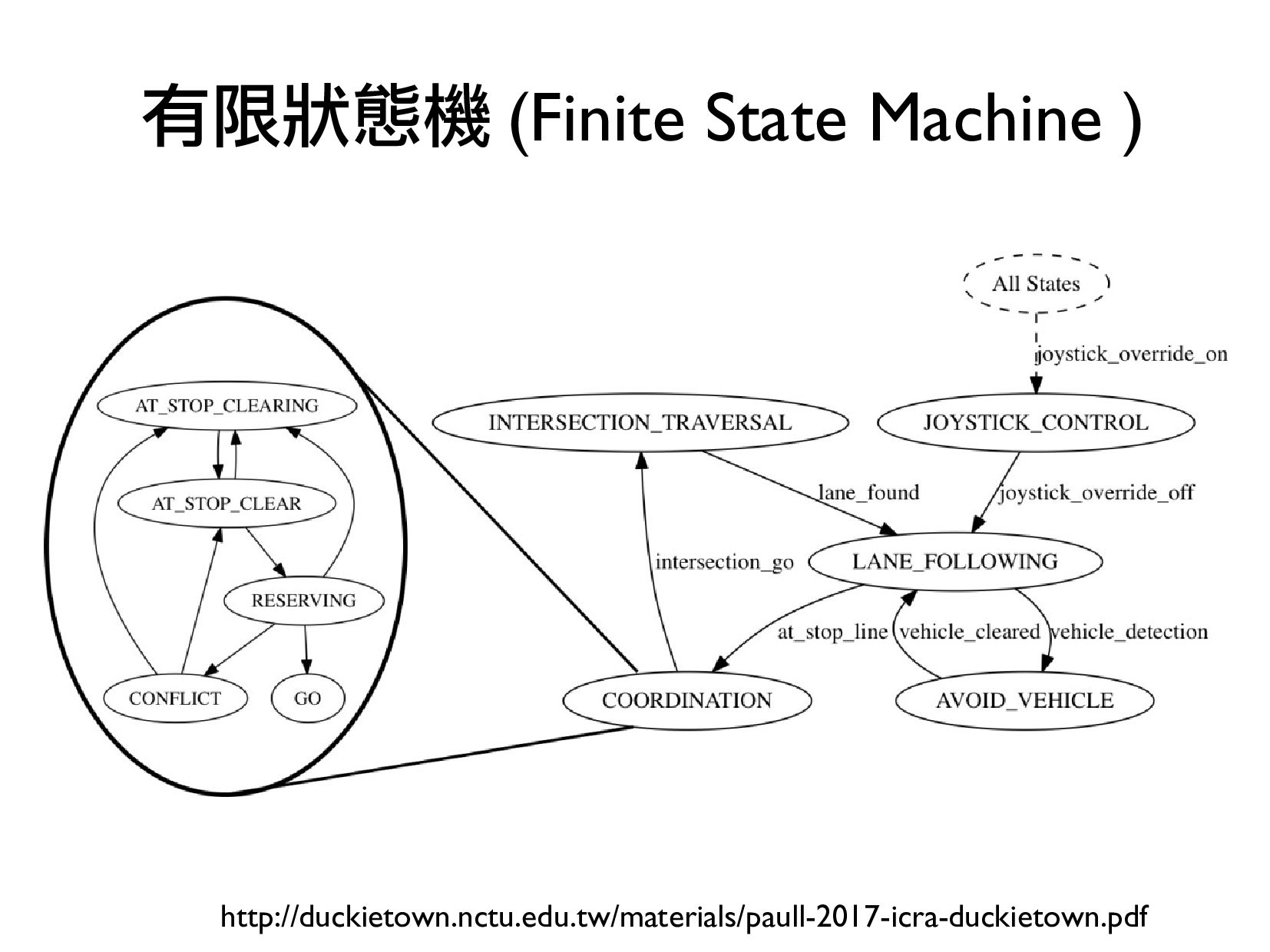
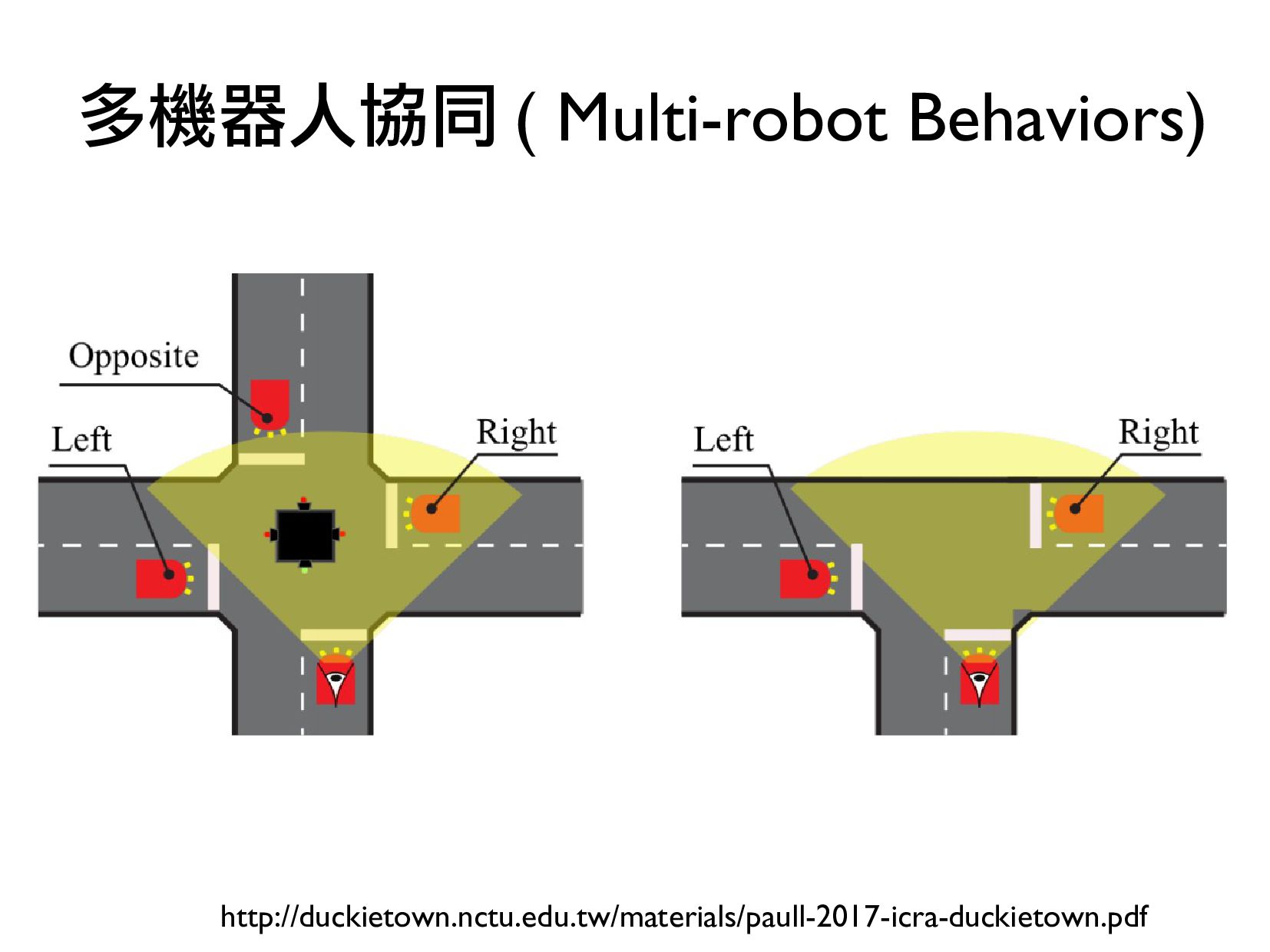
從這專案中我們可以學習到感測器校正、計算機視覺、物體辨識和分散式協調等。並實際搭建 Duckiebot 平台、建立機器人體系(ROS),使用 Python + OpenCV 用電腦視覺實現單系統機器人車道跟隨(lane following)。使用的硬體包括 Raspberry Pi、雙層三輪小車、馬達控制板和最重要的魚眼相機等。
學習資源:
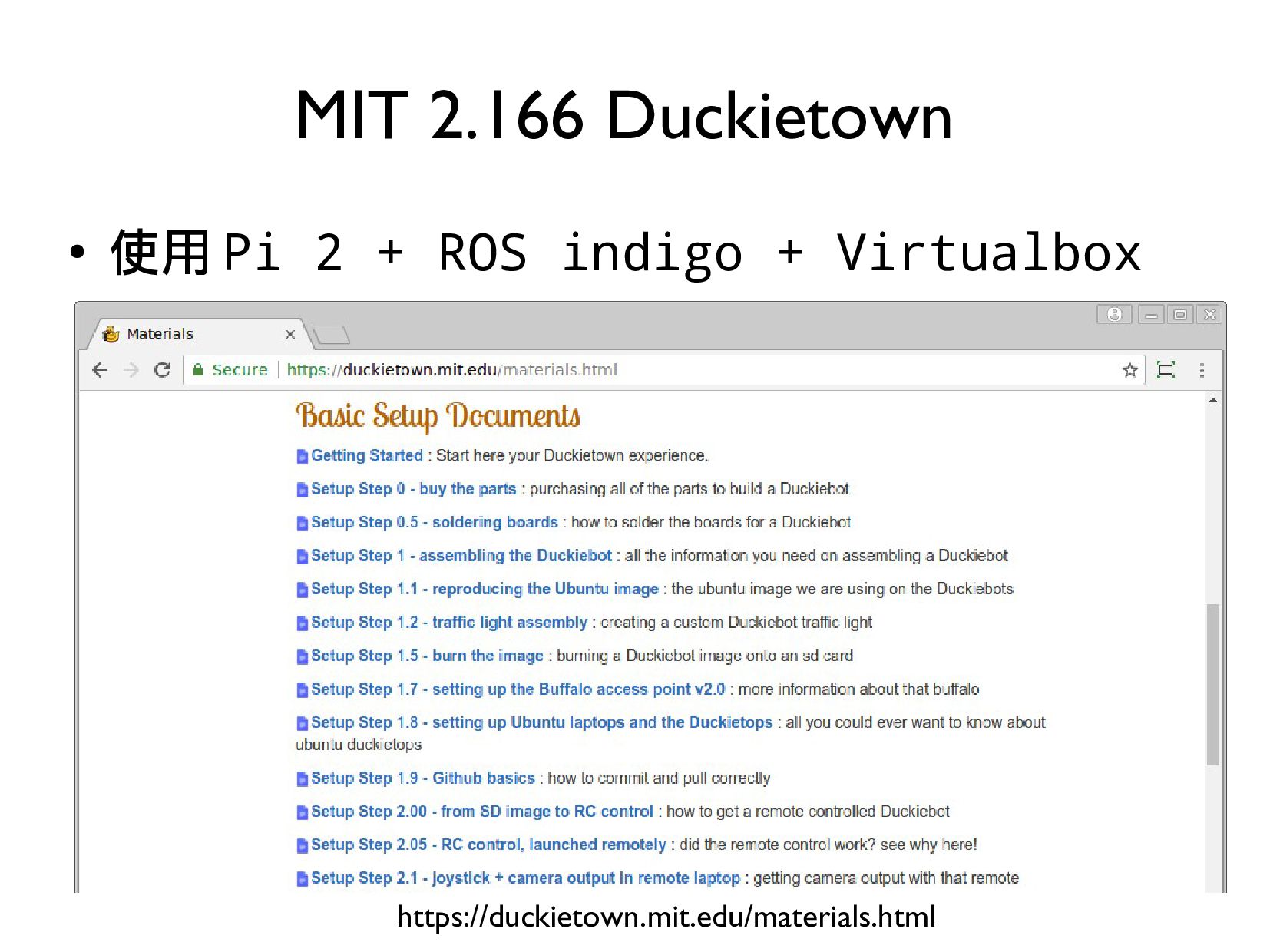
1. MIT 2.166 Duckietown, https://duckietown.mit.edu/materials.html
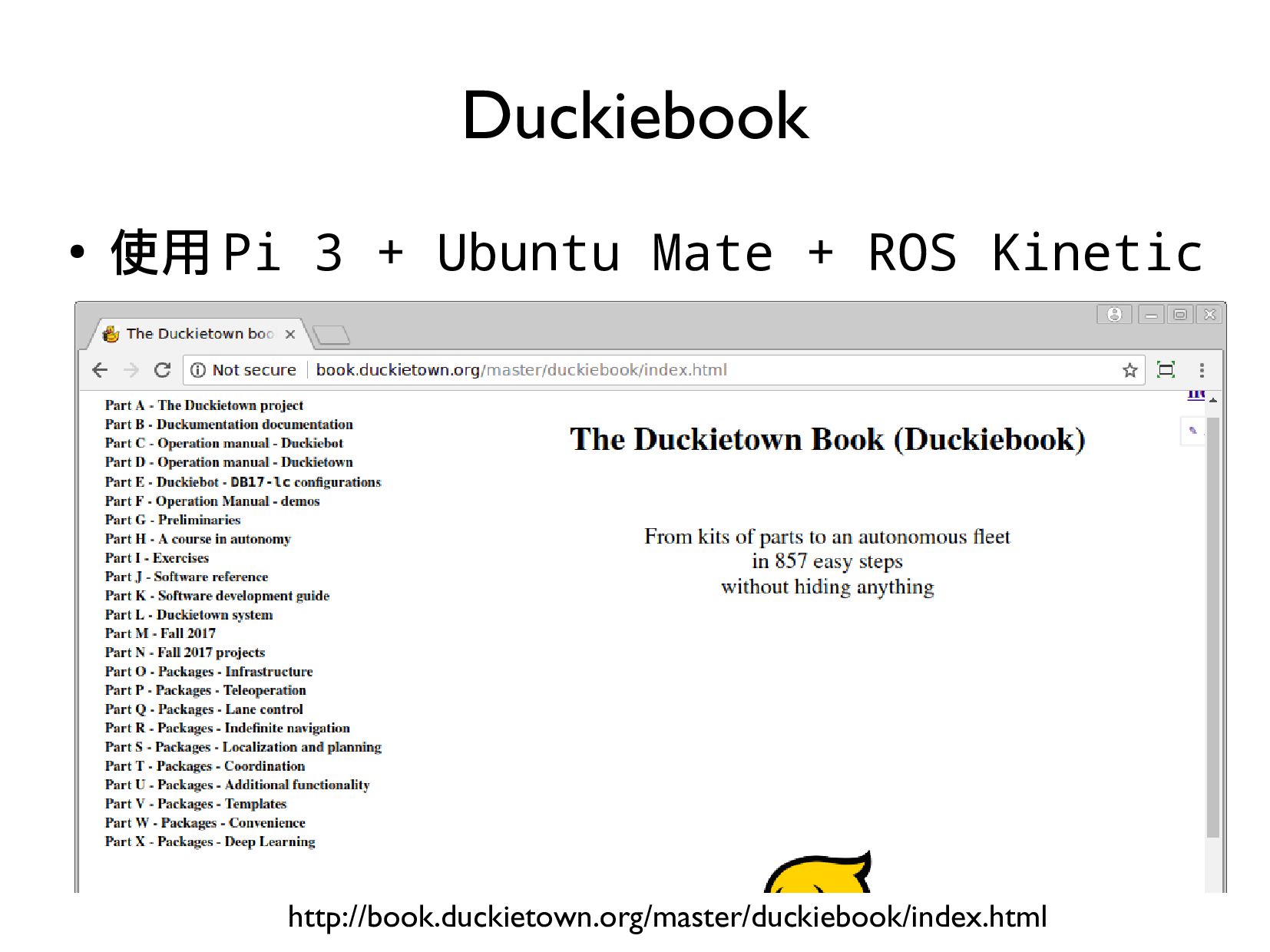
2. Duckiebook, http://book.duckietown.org/master/duckiebook/index.html
3. Duckietown交大分支, https://duckietown-nctu.github.io/
4. 交大軟體創意專題 , http://ocw.nctu.edu.tw/course_detail-c.php?bgid=8&gid=0&nid=557&pid=887
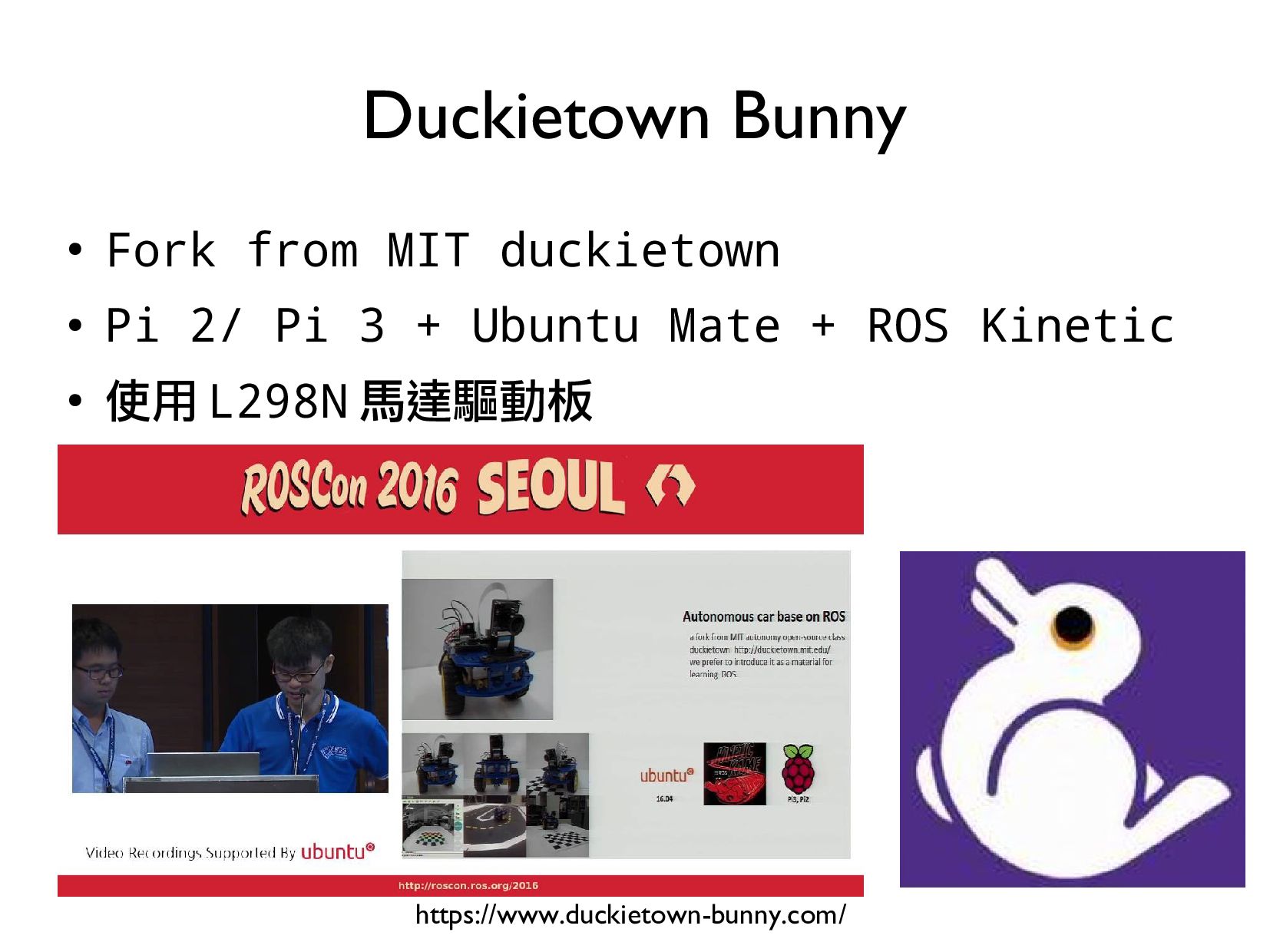
5. Duckietown Bunny, https://www.duckietown-bunny.com/
購買 Duckietown 小鴨車 小鴨城 自走車 學習套件:
https://www.piepie.com.tw/21576/duckietown-car-starter-kit
![小鴨城 (Duckietown) 一個基於 Raspberry Pi 和 ROS 的開源無人小車專案介紹 台灣樹莓派 <[email protected]>](https://files.speakerdeck.com/presentations/71ff1e65545d47b78bc59b250edd8ce4/slide_0.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}