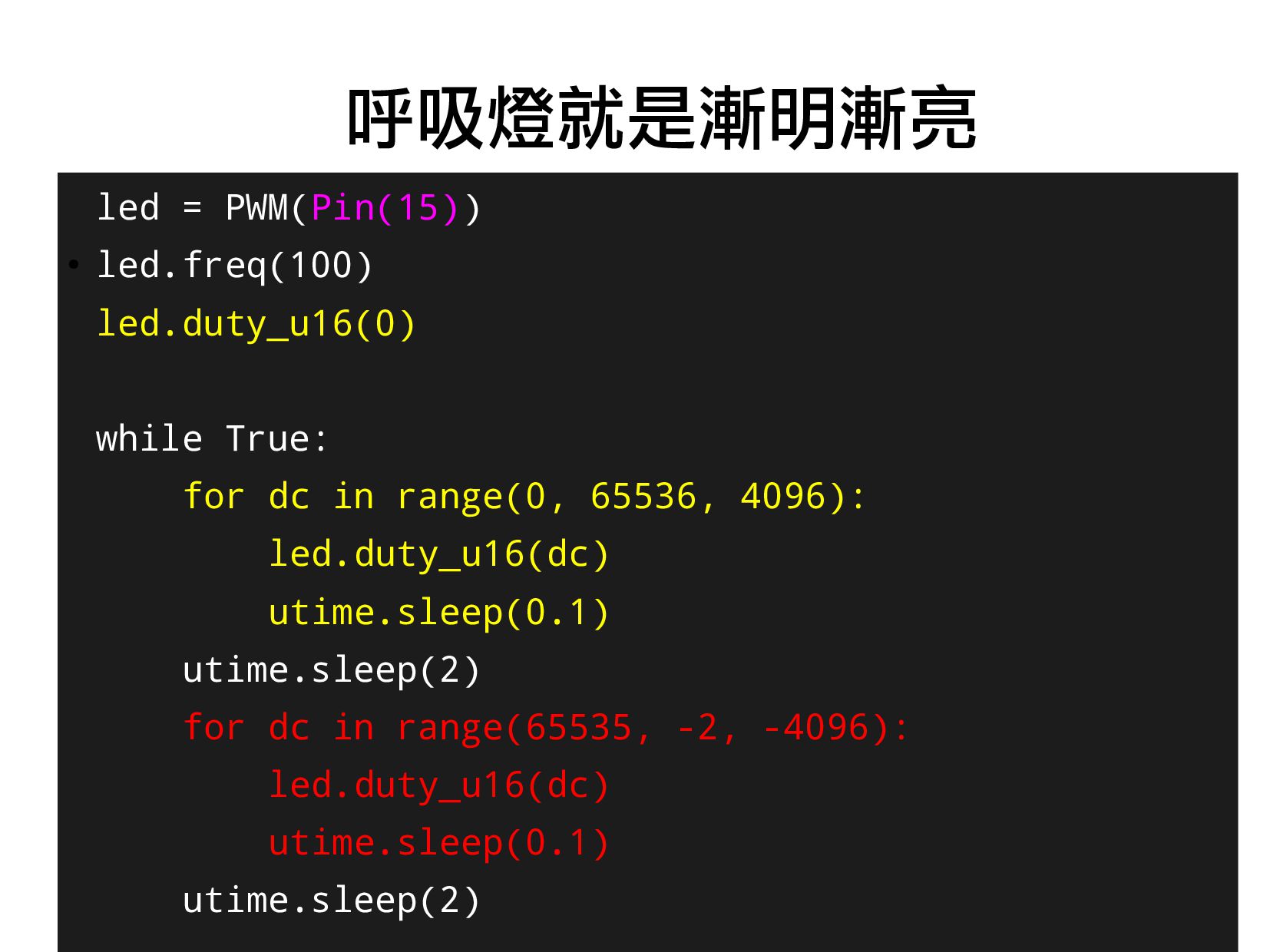
dc in range(0, 65536, 4096): led.duty_u16(dc) utime.sleep(0.1) utime.sleep(2) for dc in range(65535, -2, -4096): led.duty_u16(dc) utime.sleep(0.1) utime.sleep(2) 呼吸燈就是漸明漸亮
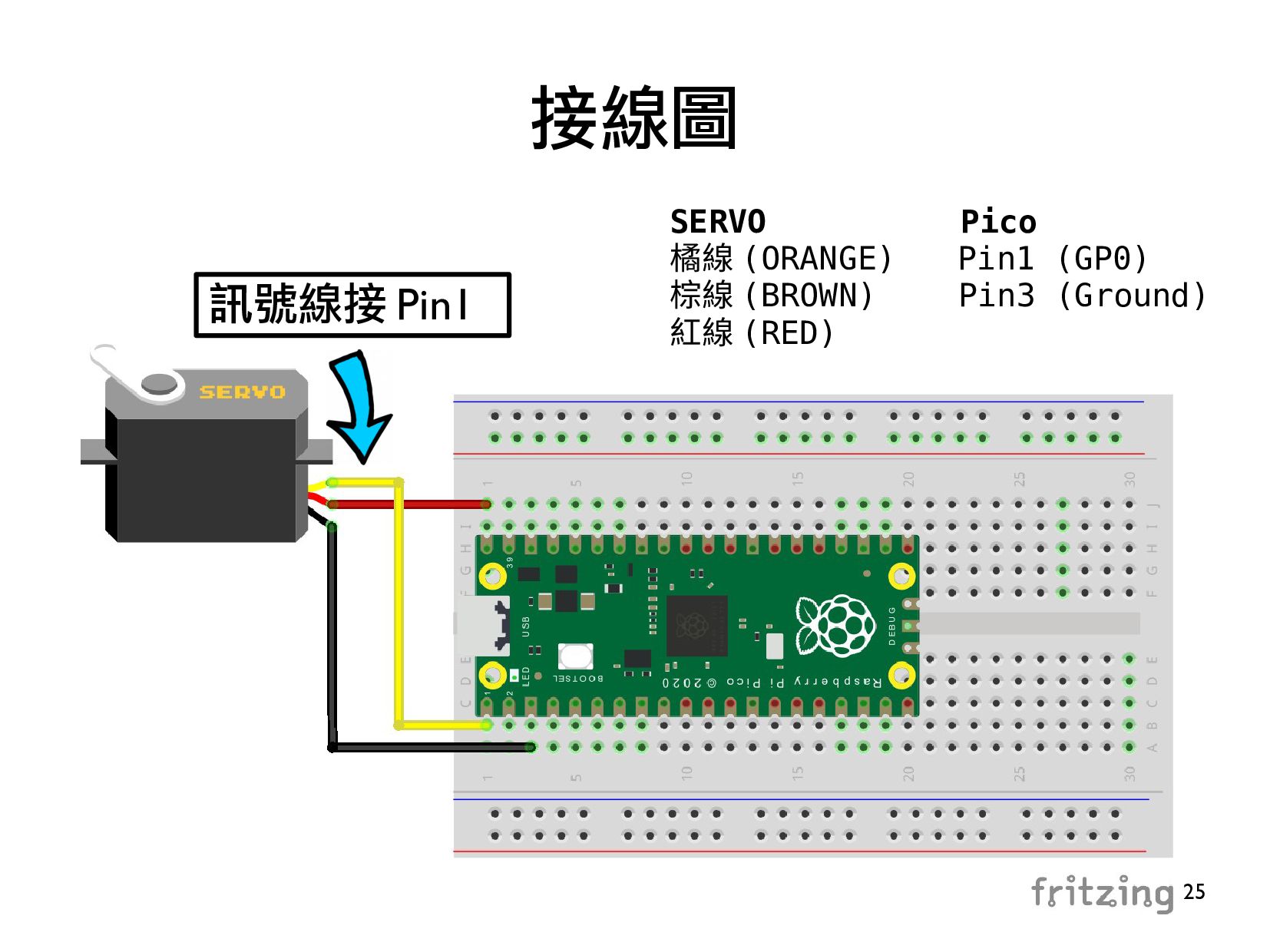
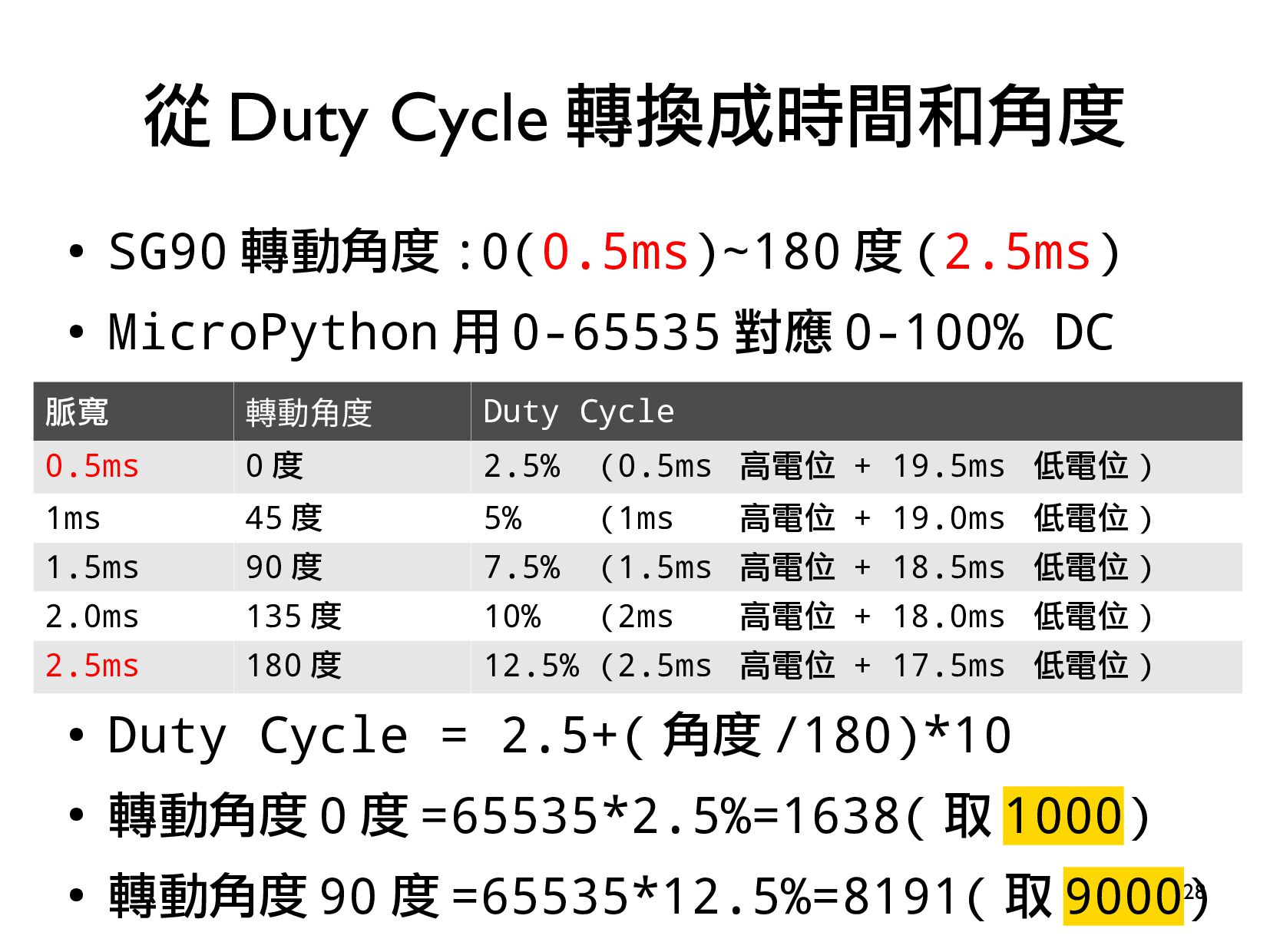
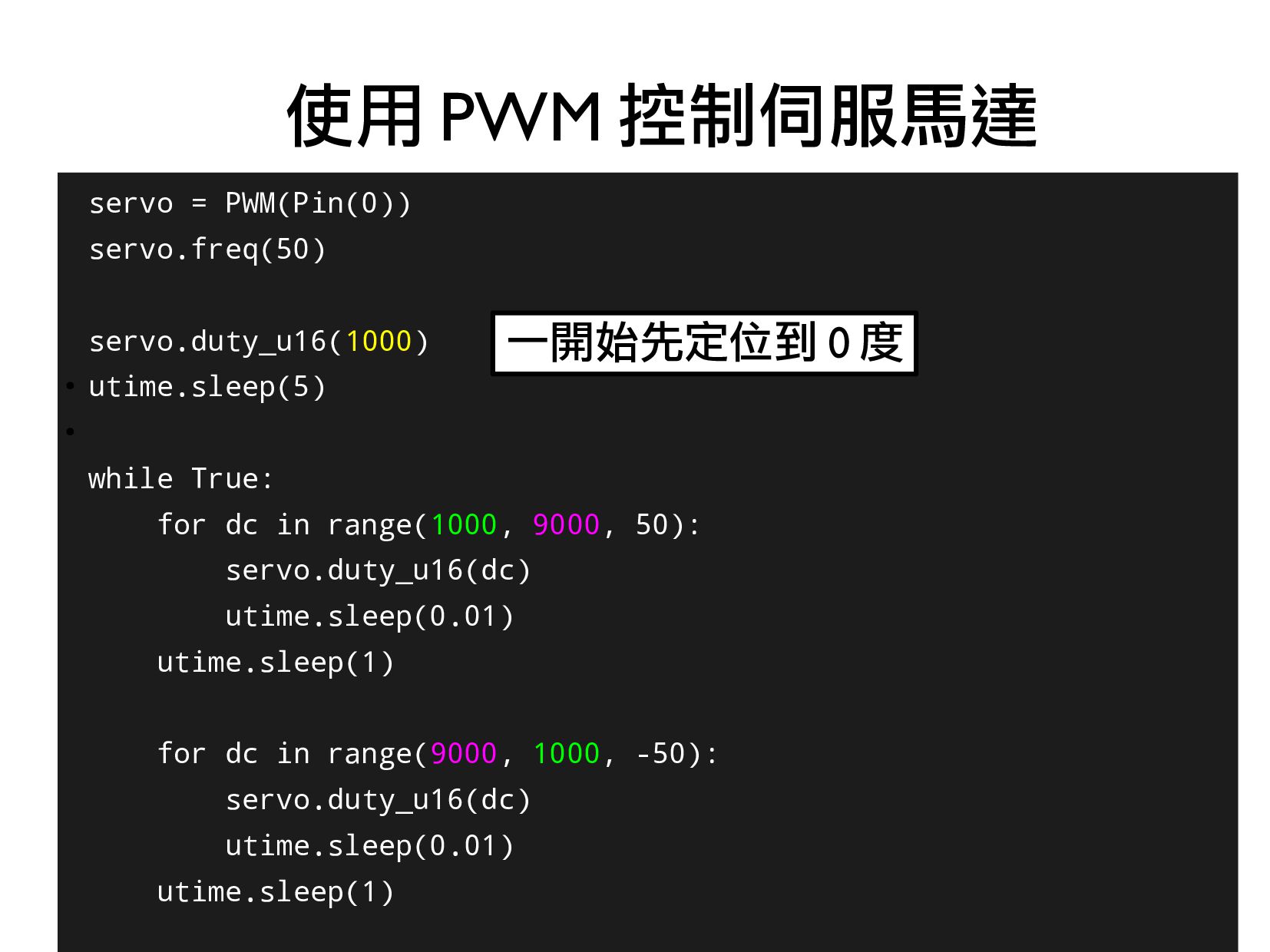
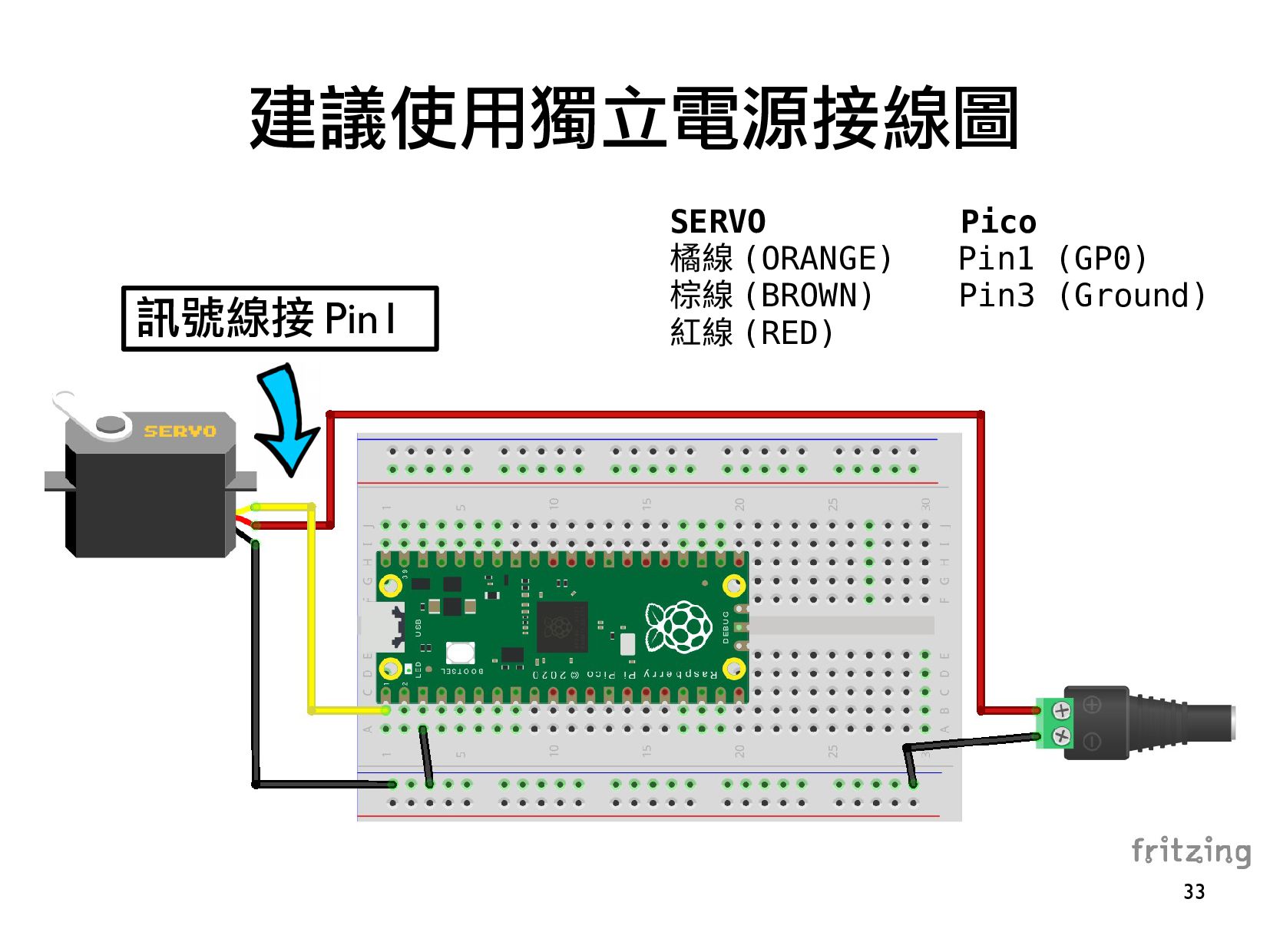
True: for dc in range(1000, 9000, 50): servo.duty_u16(dc) utime.sleep(0.01) utime.sleep(1) for dc in range(9000, 1000, -50): servo.duty_u16(dc) utime.sleep(0.01) utime.sleep(1) 使用 PWM 控制伺服馬達 一開始先定位到 0 度
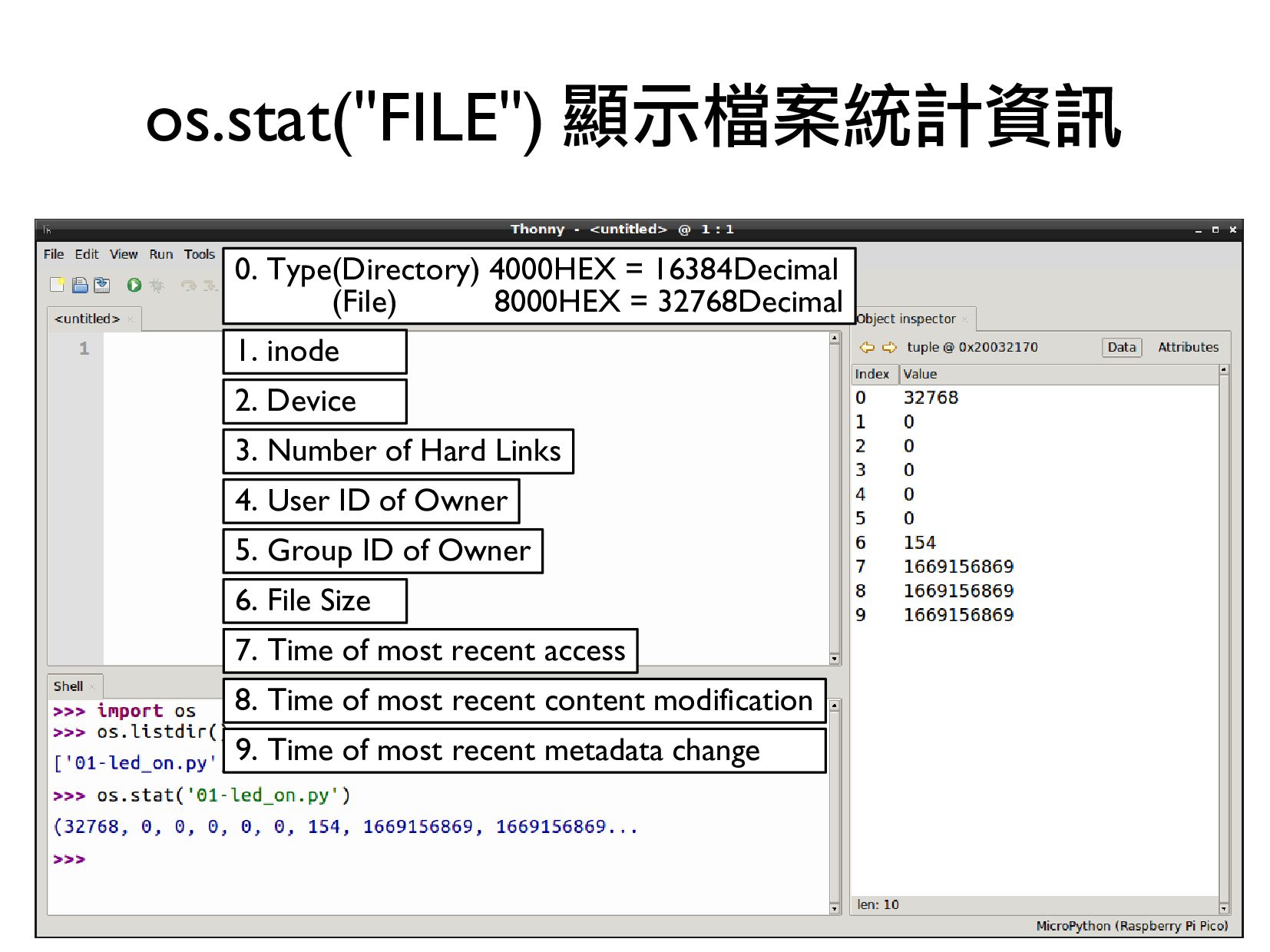
32768Decimal 1. inode 2. Device 3. Number of Hard Links 4. User ID of Owner 5. Group ID of Owner 6. File Size 7. Time of most recent access 8. Time of most recent content modification 9. Time of most recent metadata change
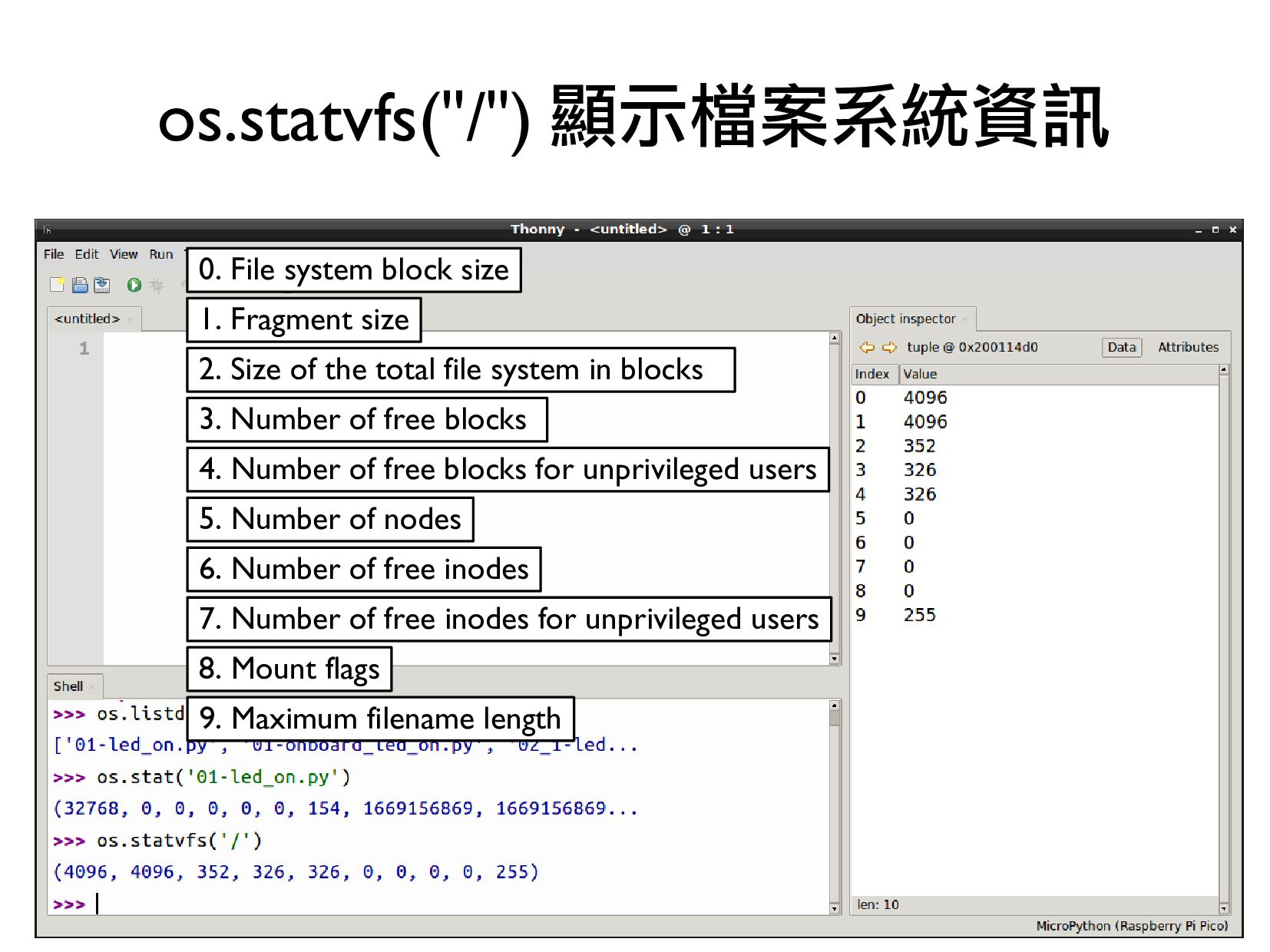
2. Size of the total file system in blocks 3. Number of free blocks 4. Number of free blocks for unprivileged users 5. Number of nodes 6. Number of free inodes 7. Number of free inodes for unprivileged users 8. Mount flags 9. Maximum filename length
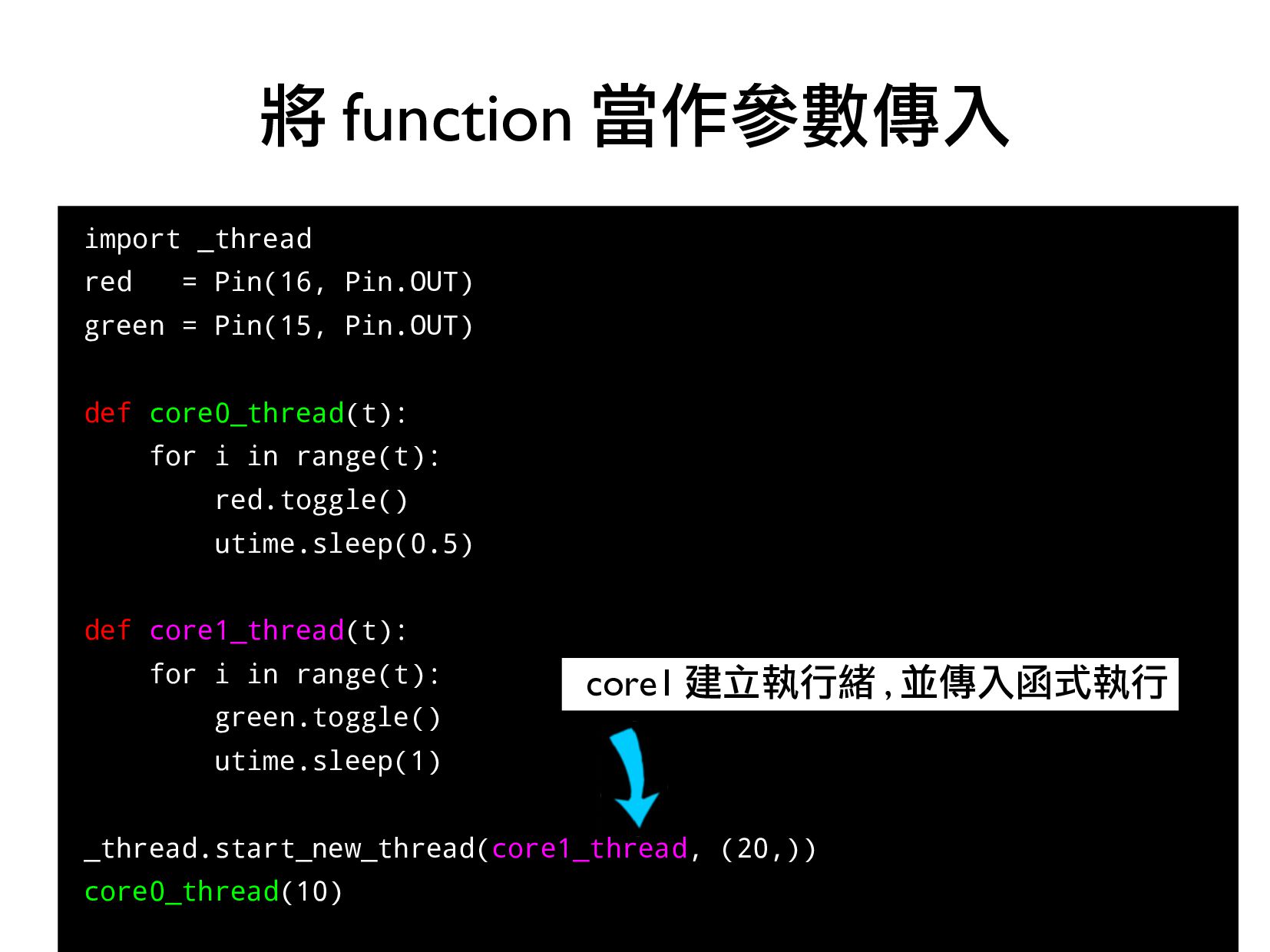
Pin(15, Pin.OUT) def core0_thread(t): for i in range(t): red.toggle() utime.sleep(0.5) def core1_thread(t): for i in range(t): green.toggle() utime.sleep(1) _thread.start_new_thread(core1_thread, (20,)) core0_thread(10) • 將 function 當作參數傳入 core1 建立執行緒 , 並傳入函式執行
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}