SciTech, San Diego, CA January 2019 Pranay Seshadri University of Cambridge | The Alan Turing Institute Sławomir Tadeja & Per Ola Kristensson University of Cambridge
Systems Lab, University of Cambridge https://skt40.github.io Per Ola Kristensson Professor and Director, Intelligent Interactive Systems Lab, University of Cambridge
complex multi-discplinary, multi- objective and high-dimensional problem. Technologies that facilitate faster design cycle times can be real game changers.
A realistic and immersive simulation of a three-dimensional environment, created using interactive software and hardware, and experienced or controlled by movement of the body. [vur-choo-uh l ree-al-i-tee]
high- dimensional spaces. ‣ Challenging to visualize high-dimensional spaces. ‣ We wish to visualize key output quantities of interest as functions of input parameters. ‣ Can utilize ideas from dimension reduction to aid this endeavor.
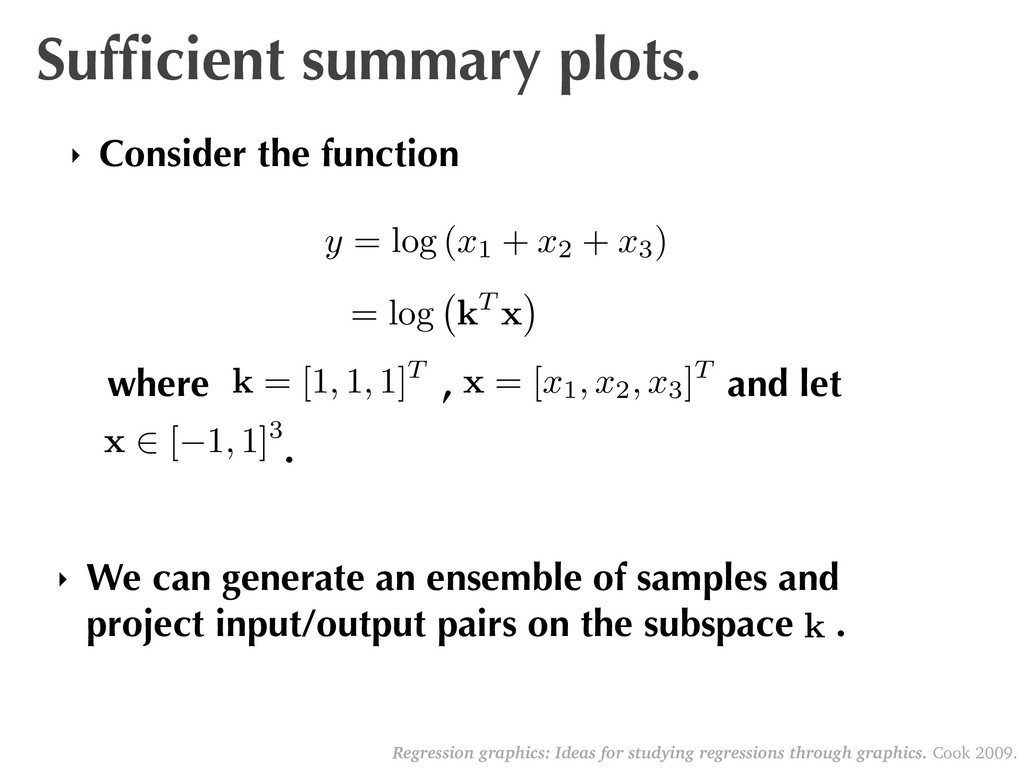
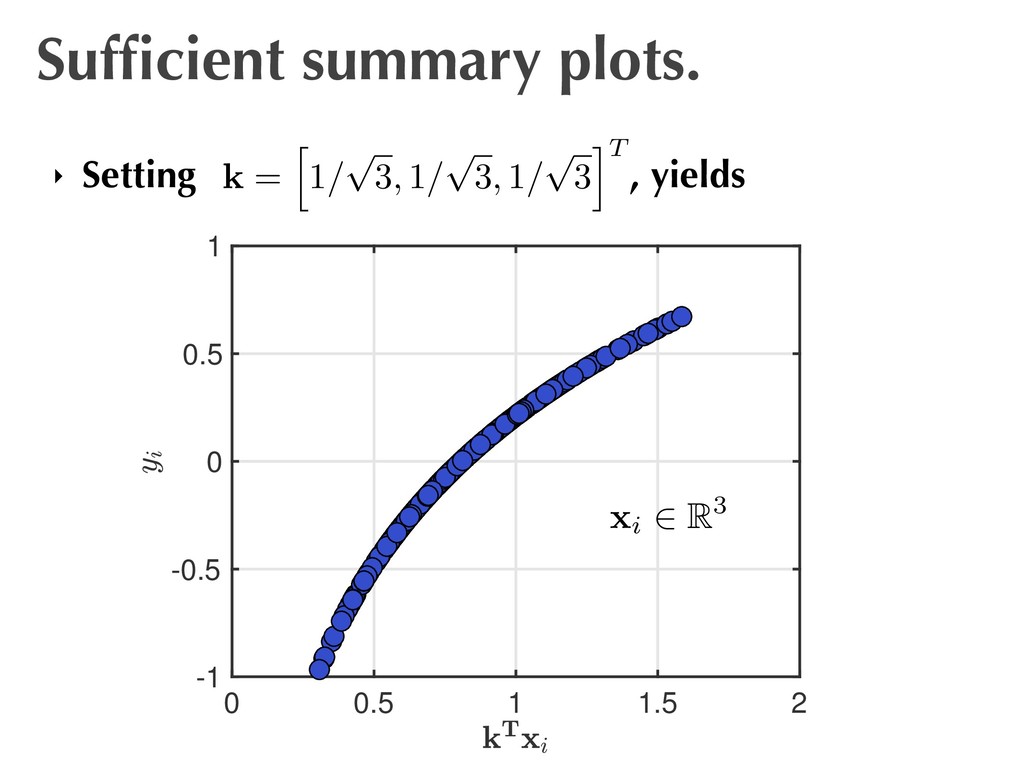
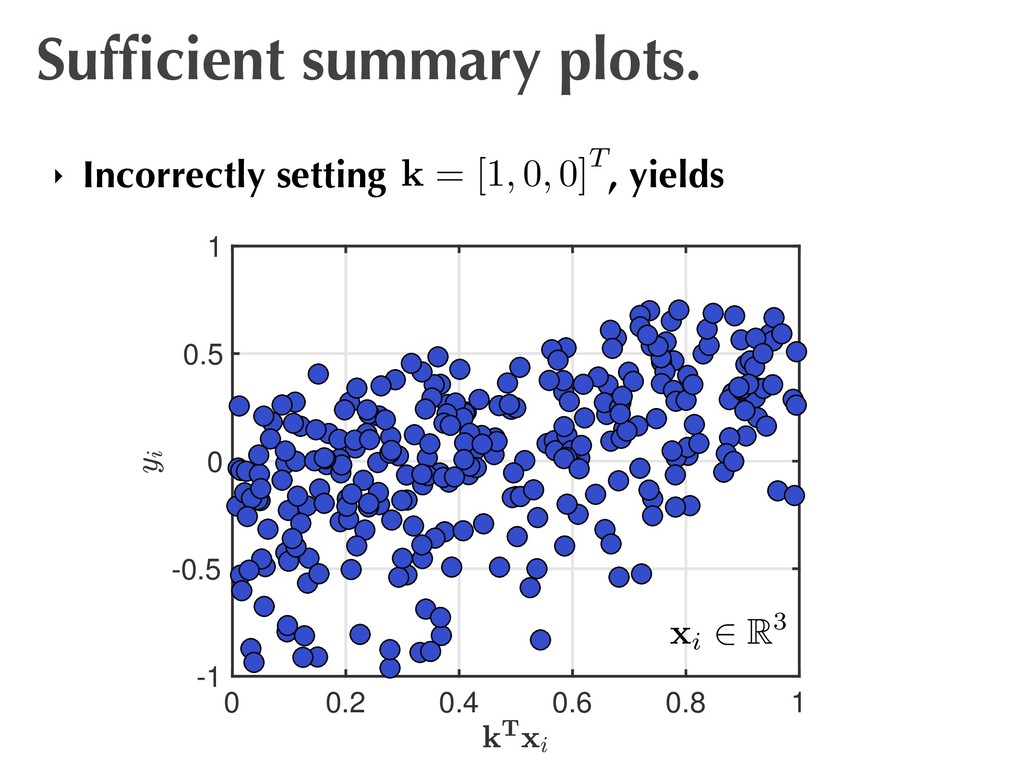
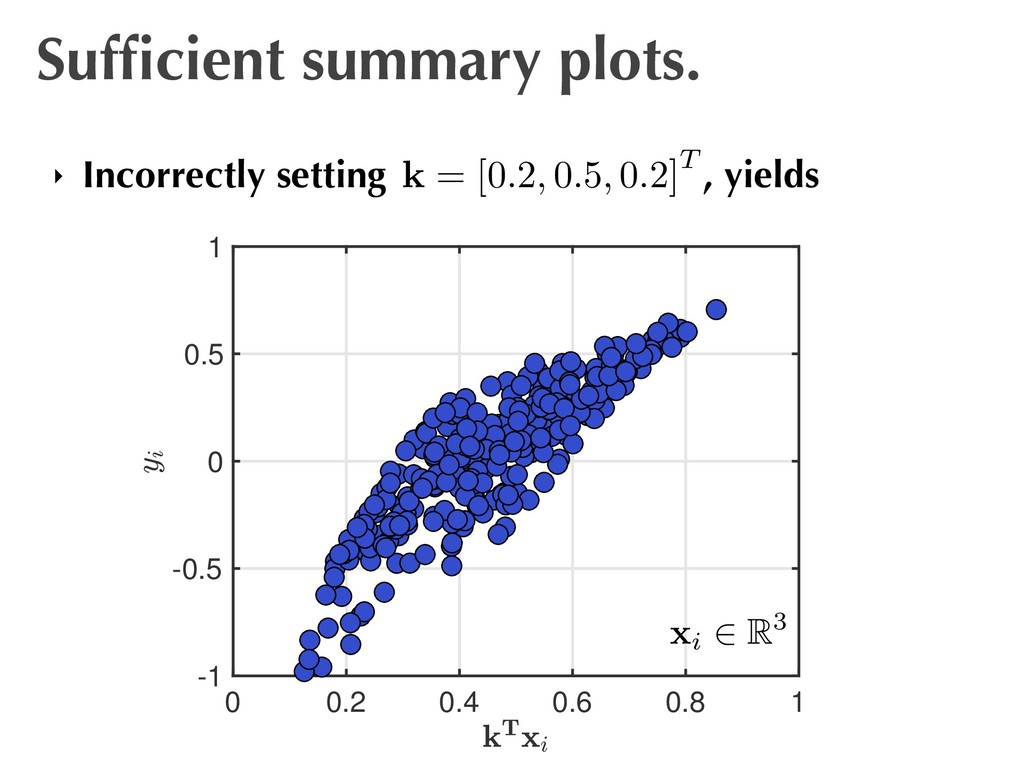
(x1 + x2 + x3) y = log kT x k = [1, 1, 1]T where , and let x 2 [ 1, 1]3 ‣ We can generate an ensemble of samples and project input/output pairs on the subspace . k x = [x1, x2, x3]T . Regression graphics: Ideas for studying regressions through graphics. Cook 2009.
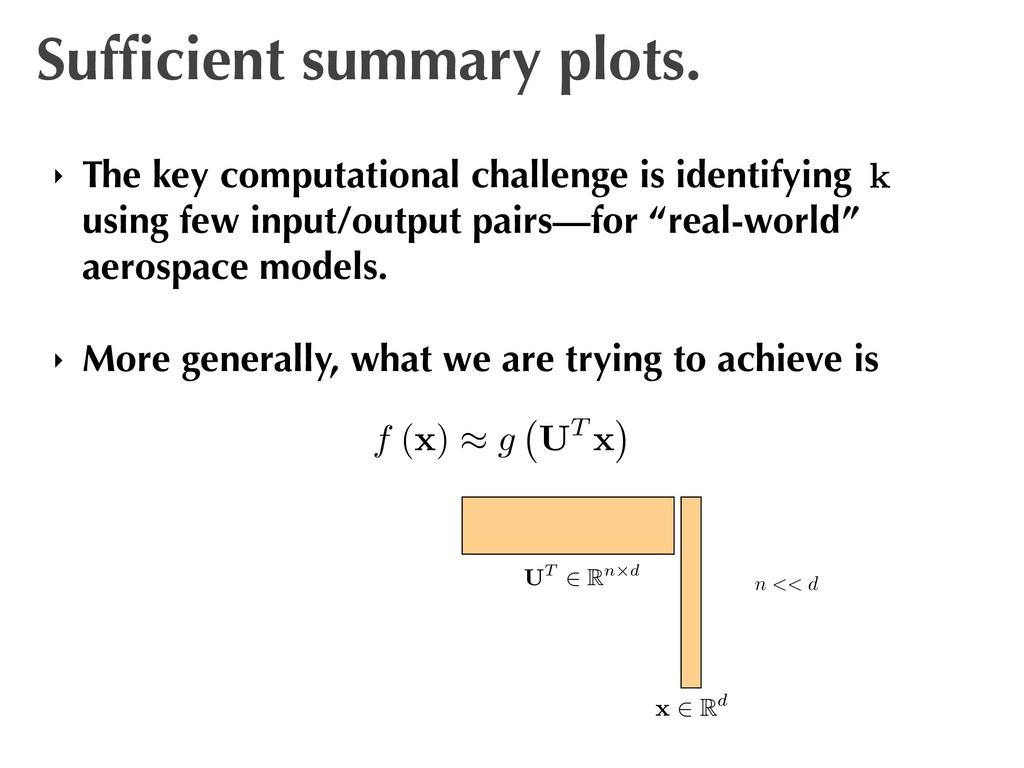
using few input/output pairs—for “real-world” aerospace models. ‣ More generally, what we are trying to achieve is k f (x) ⇡ g UT x UT 2 Rn⇥d x 2 Rd n << d
work in this area from different communities. ‣ Resulting in numerous recipes to achieve the approximation f (x) ⇡ g UT x Active subspaces. Constantine et al. 2015 Generalized ridge functions. Pinkus 2015 Gaussian ridge functions. Seshadri 2018 Polynomial variable projection. Hokanson and Constantine 2018 Projection pursuit regression. Friedman and Stuetzle 1989 Sparse ridge approximations. Fornasier et al. 2012 .
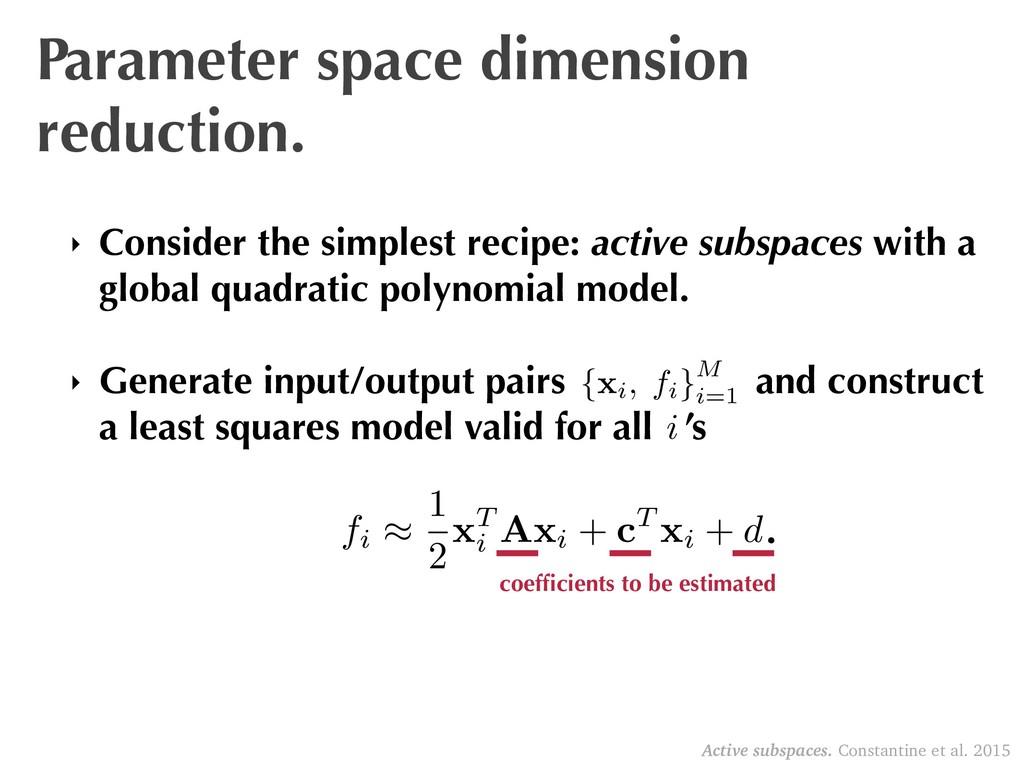
subspaces with a global quadratic polynomial model. ‣ Generate input/output pairs and construct a least squares model valid for all ’s {xi, fi }M i=1 fi ⇡ 1 2 xT i Axi + cT xi + d coefficients to be estimated i . Active subspaces. Constantine et al. 2015
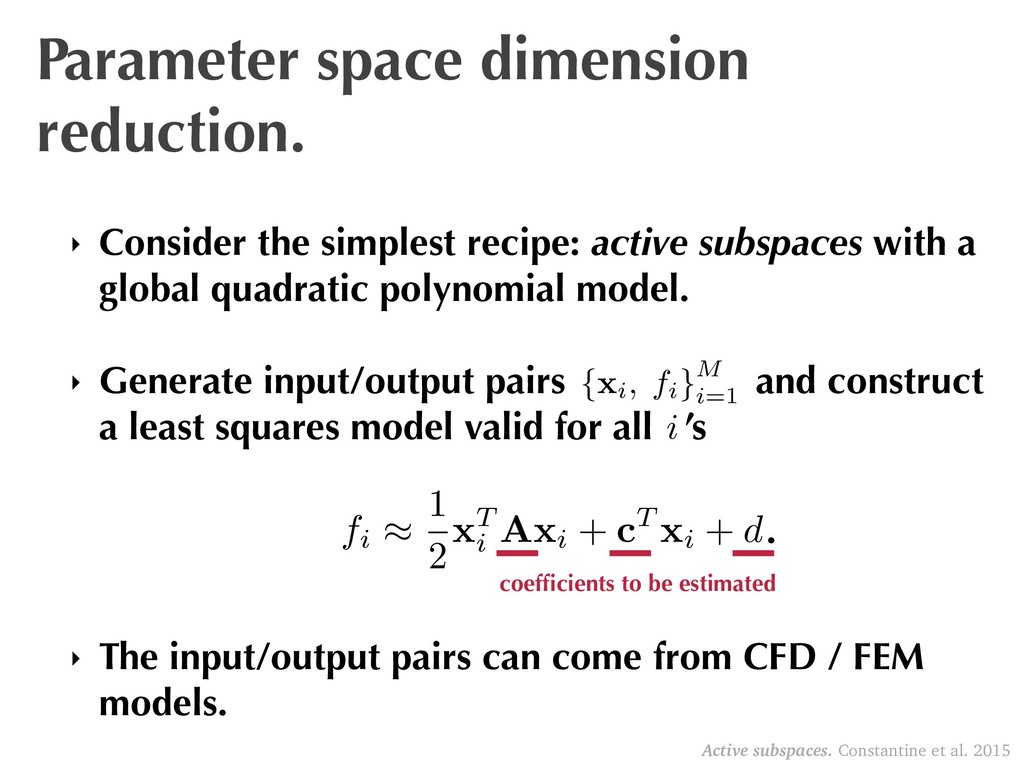
subspaces with a global quadratic polynomial model. ‣ Generate input/output pairs and construct a least squares model valid for all ’s ‣ The input/output pairs can come from CFD / FEM models. {xi, fi }M i=1 fi ⇡ 1 2 xT i Axi + cT xi + d coefficients to be estimated i . Active subspaces. Constantine et al. 2015
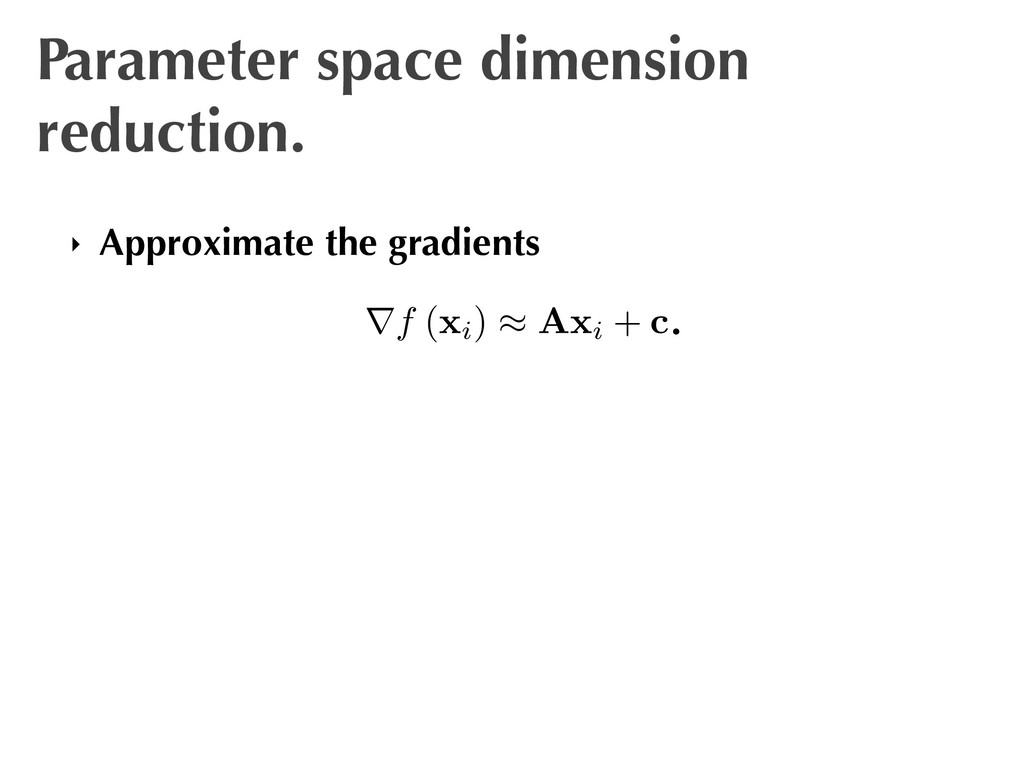
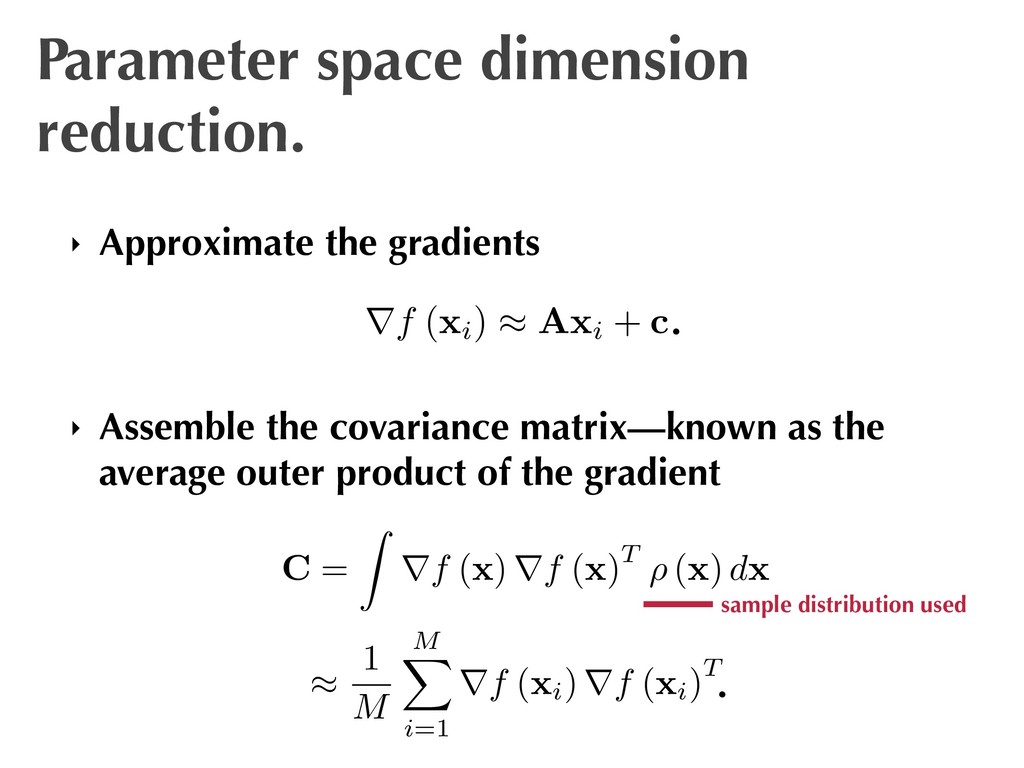
the covariance matrix—known as the average outer product of the gradient rf (xi) ⇡ Axi + c. sample distribution used ⇡ 1 M M X i=1 rf (xi) rf (xi)T. C = Z rf (x) rf (x)T ⇢ (x) dx
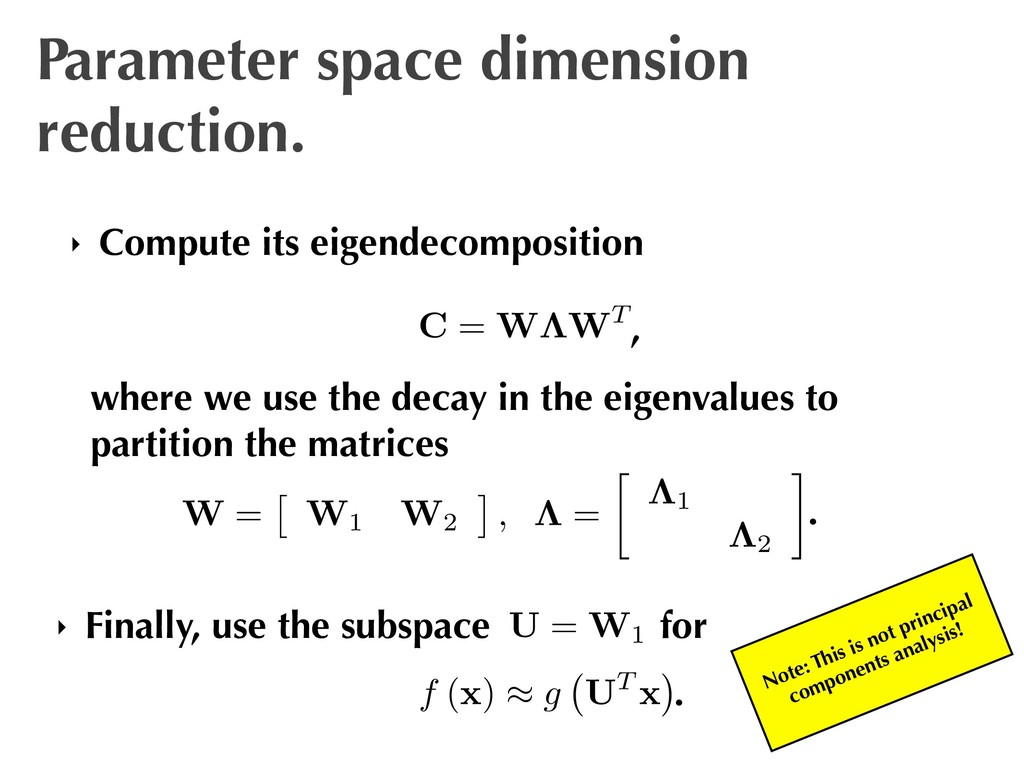
W⇤WT where we use the decay in the eigenvalues to partition the matrices W = ⇥ W1 W2 ⇤ , ⇤ = ⇤1 ⇤2 , . ‣ Finally, use the subspace for U = W1 f (x) ⇡ g UT x . Note: This is not principal components analysis!
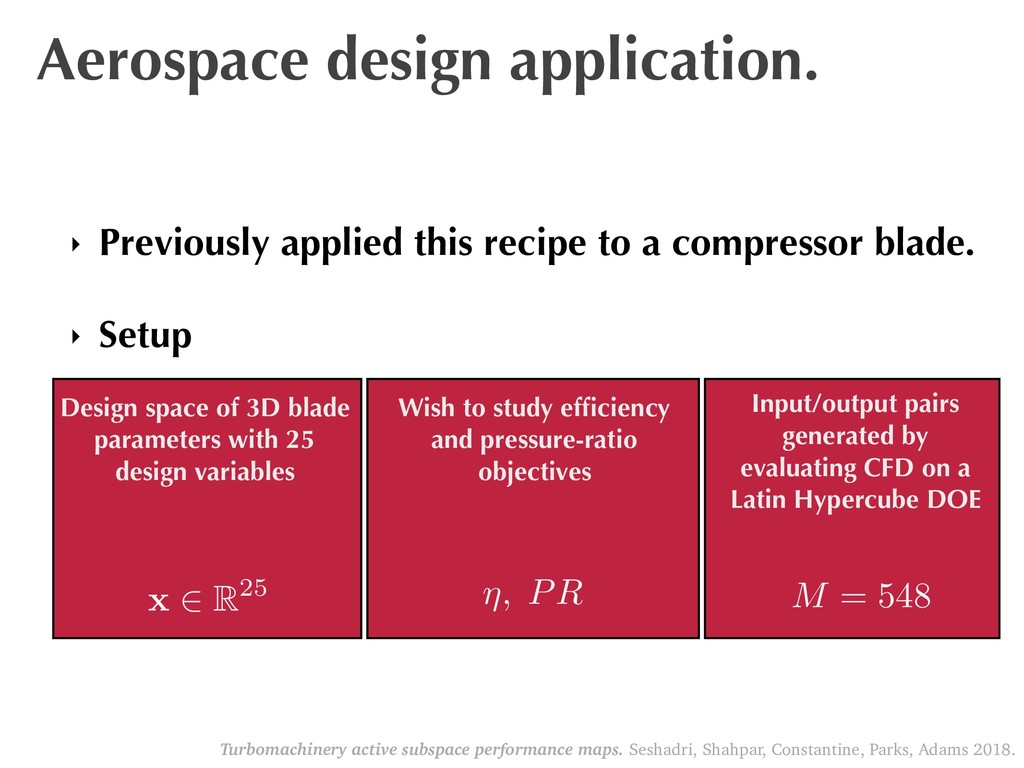
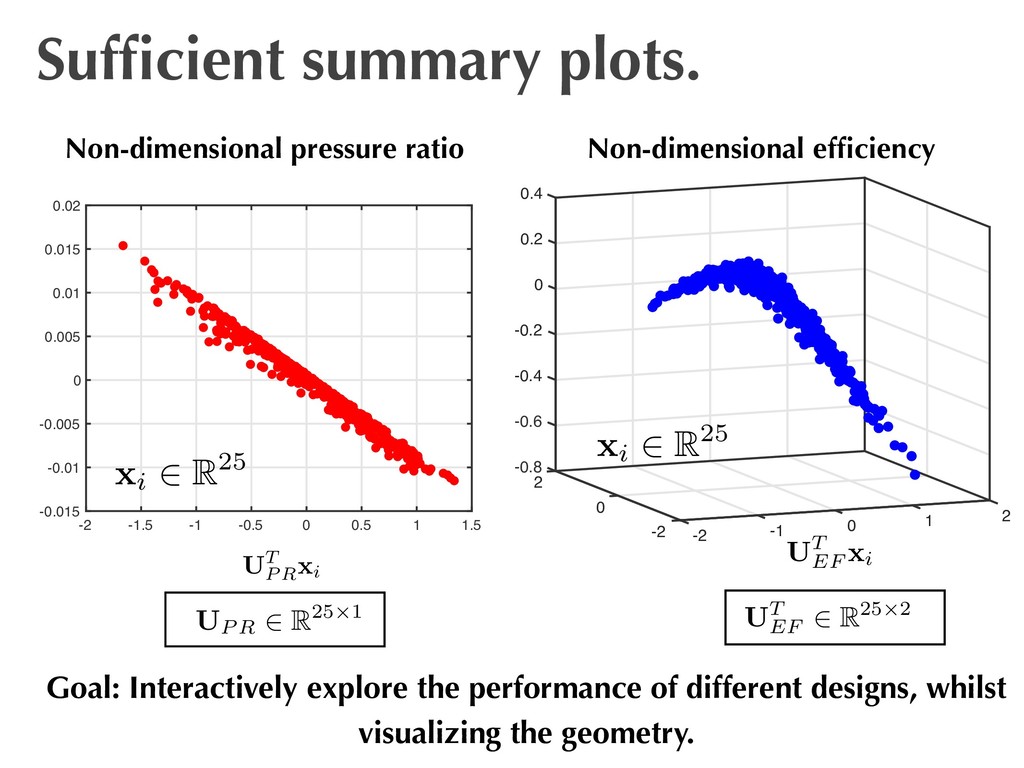
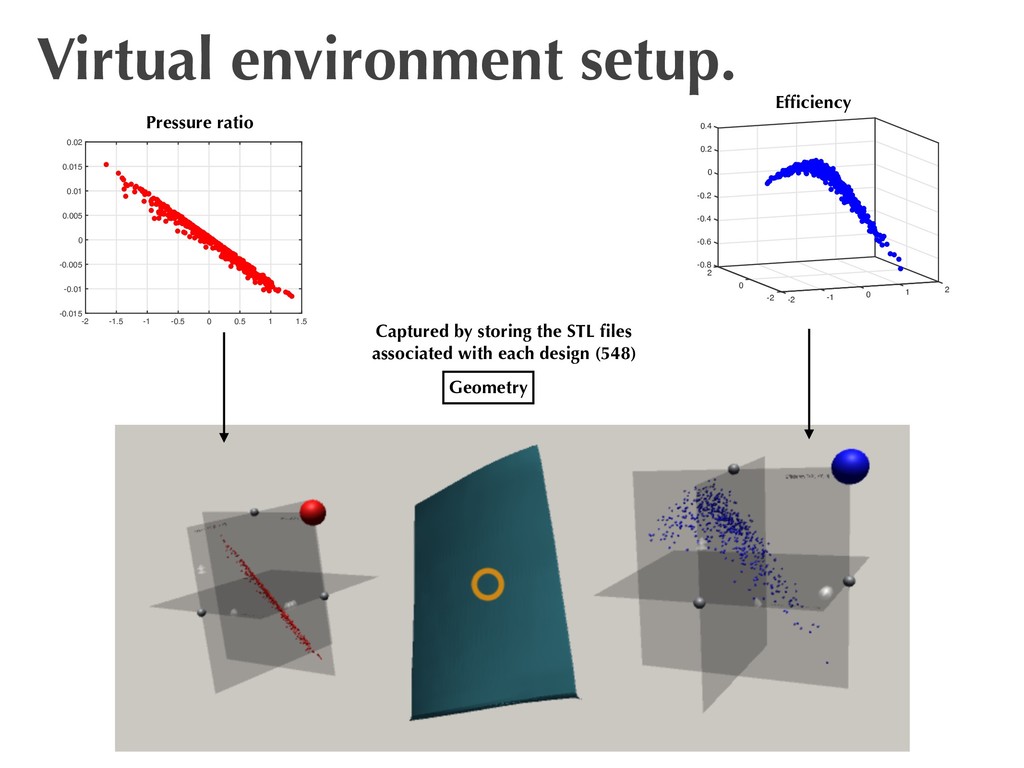
compressor blade. ‣ Setup Turbomachinery active subspace performance maps. Seshadri, Shahpar, Constantine, Parks, Adams 2018. x 2 R25 Design space of 3D blade parameters with 25 design variables Wish to study efficiency and pressure-ratio objectives ⌘, PR Input/output pairs generated by evaluating CFD on a Latin Hypercube DOE M = 548
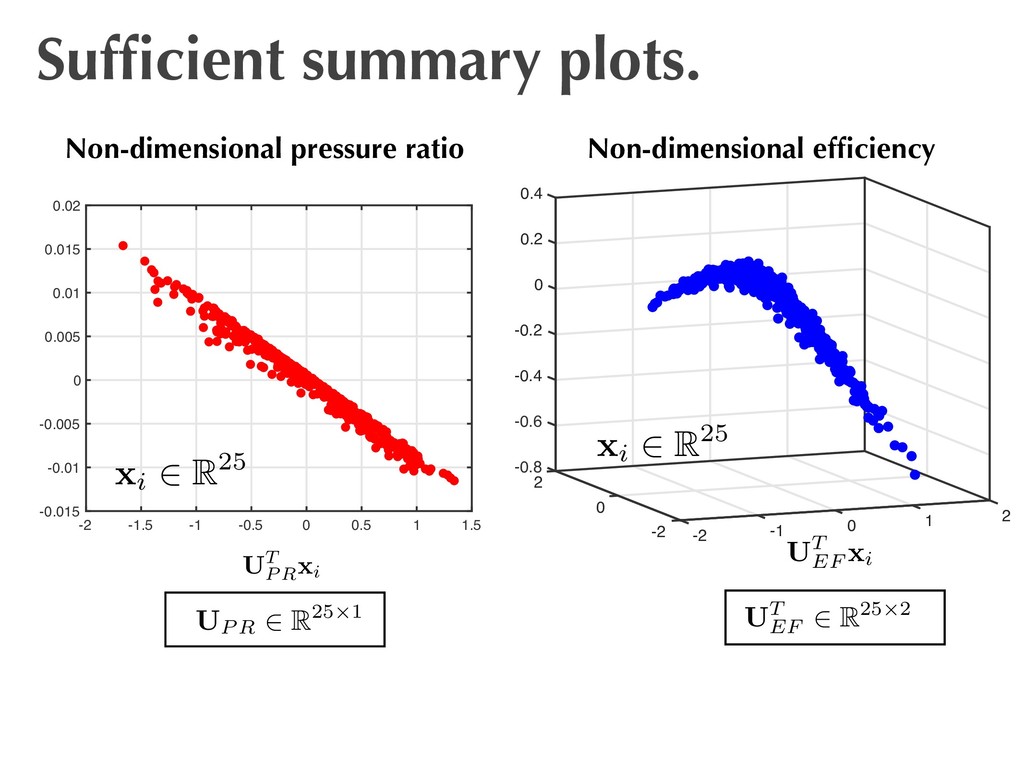
1.5 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 xi 2 R25 -0.8 -0.6 -0.4 -0.2 2 0 0.2 0.4 0 2 1 0 -1 -2 -2 xi 2 R25 Non-dimensional efficiency Non-dimensional pressure ratio UT P R xi UP R 2 R25⇥1 UT EF 2 R25⇥2 UT EF xi
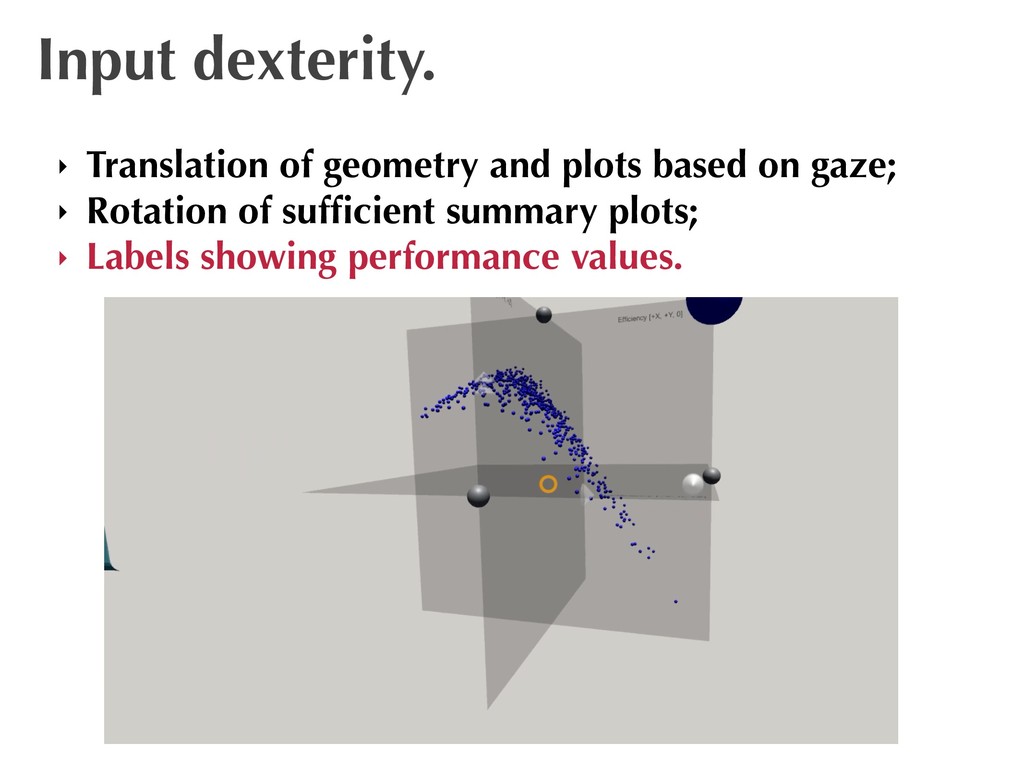
1.5 -0.015 -0.01 -0.005 0 0.005 0.01 0.015 0.02 xi 2 R25 -0.8 -0.6 -0.4 -0.2 2 0 0.2 0.4 0 2 1 0 -1 -2 -2 xi 2 R25 Non-dimensional efficiency Non-dimensional pressure ratio UT P R xi UP R 2 R25⇥1 UT EF 2 R25⇥2 UT EF xi Goal: Interactively explore the performance of different designs, whilst visualizing the geometry.
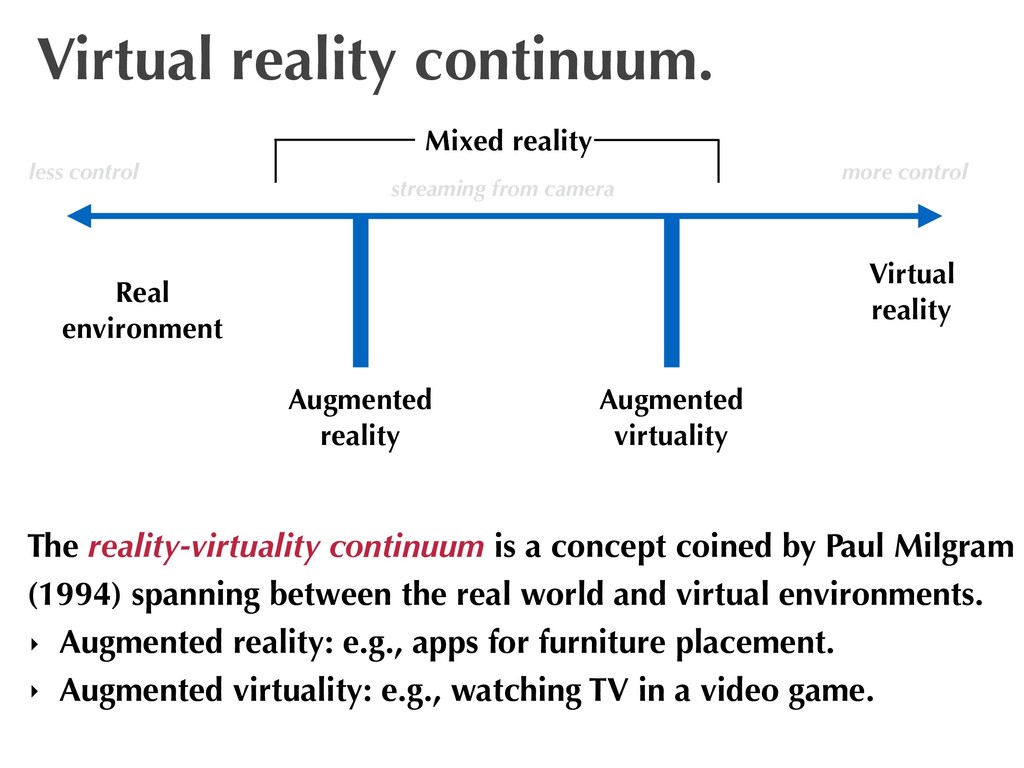
reality Mixed reality The reality-virtuality continuum is a concept coined by Paul Milgram (1994) spanning between the real world and virtual environments. ‣ Augmented reality: e.g., apps for furniture placement. ‣ Augmented virtuality: e.g., watching TV in a video game. streaming from camera more control less control
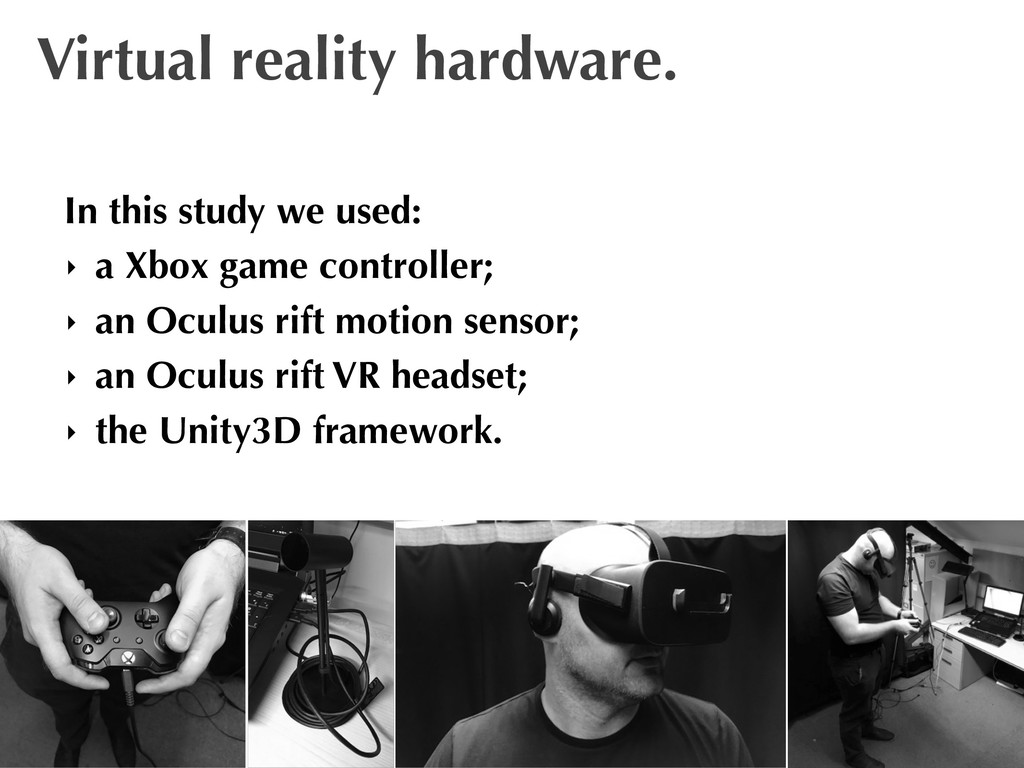
of presence. ‣ Completely controllable environment. ‣ Visual, auditory and haptic feedback. ‣ Gesture, eye and head motion tracking. ‣ Full field of view. Current limitations: ‣ Virtual reality sickness. ‣ Interaction paradigms are not yet well understood. ‣ Initial hardware costs.
for VR development and has the following key features: ‣ APIs for C# and Javascript; ‣ Unity’s asset store has thousands of assets and plugins; ‣ Built-in support for controllers and head-sets; ‣ Thriving community of users; ‣ Framework abides by physics (but can be altered).
What combination of design variables is the most important for increasing efficiency? ‣ What is the highest efficiency subject to certain pressure ratio constraints? ‣ How much lean and sweep do I observe in my blades? ‣ How do optimal designs compare with the nominal geometry? ‣ How does this blade perform at different speeds / mass-flow rates (~closer to stall)?
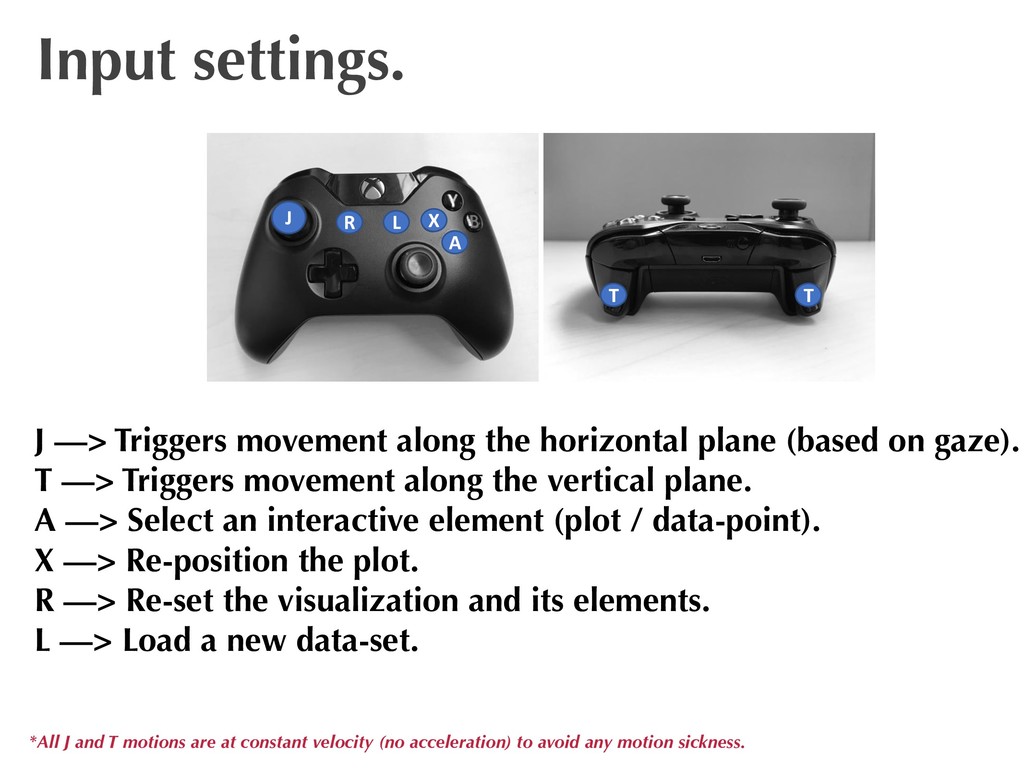
R J —> Triggers movement along the horizontal plane (based on gaze). T —> Triggers movement along the vertical plane. A —> Select an interactive element (plot / data-point). X —> Re-position the plot. R —> Re-set the visualization and its elements. L —> Load a new data-set. *All J and T motions are at constant velocity (no acceleration) to avoid any motion sickness.
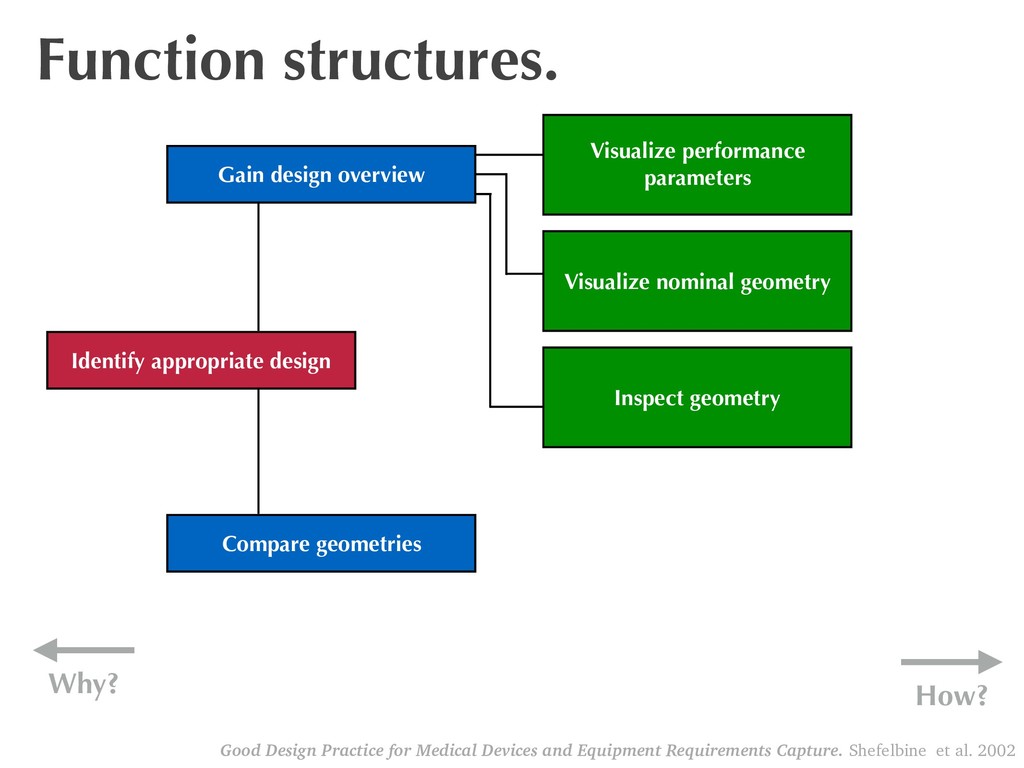
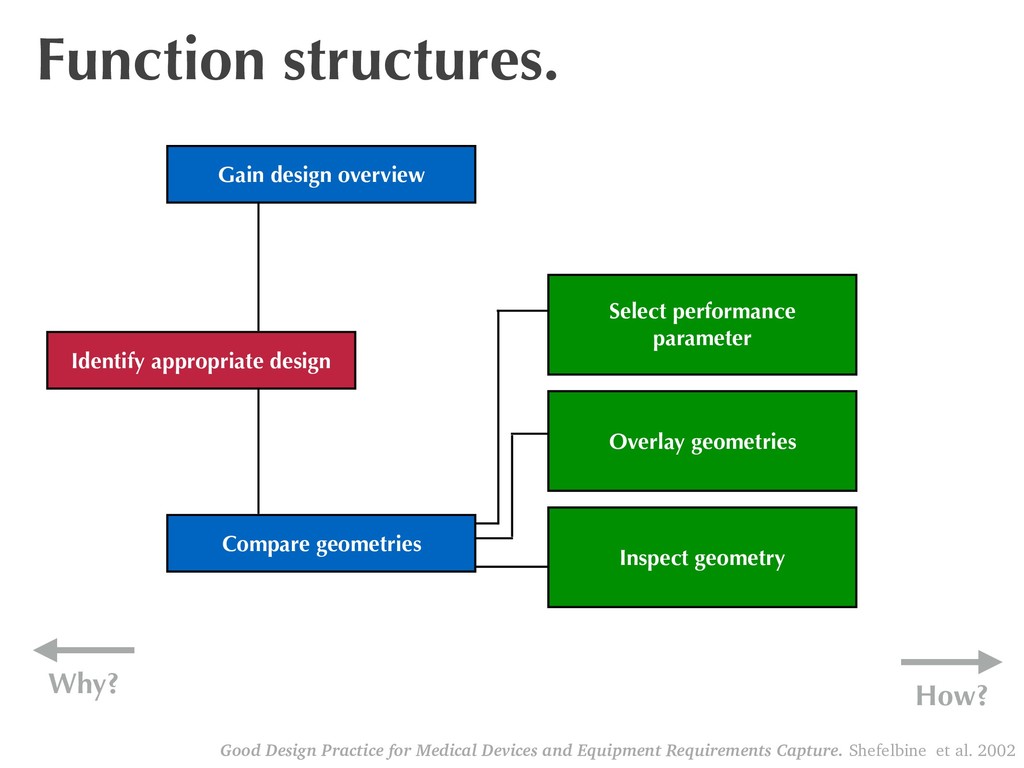
Visualize performance parameters Visualize nominal geometry Inspect geometry Good Design Practice for Medical Devices and Equipment Requirements Capture. Shefelbine et al. 2002 Why? How?
more needs to be done: ‣ Custom characteristics for each design; ‣ Greater geometry detail; ‣ Visualization of constraints on sufficient summary plots; ‣ Fitting response surfaces to generate new designs on the fly (challenging because the inverse map is not unique!) ‣ User design studies and tasks with aero-designers.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Exploring aerospace design in virtual reality with dimension reduction. [Above]](https://files.speakerdeck.com/presentations/a680da9d0fe14c74a793d97416ace0e6/slide_4.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![[Right] An engineer studying the design space (two objectives) of](https://files.speakerdeck.com/presentations/a680da9d0fe14c74a793d97416ace0e6/slide_34.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Thank you! Sławomir Tadeja University of Cambridge [email protected]](https://files.speakerdeck.com/presentations/a680da9d0fe14c74a793d97416ace0e6/slide_42.jpg){kind=link}