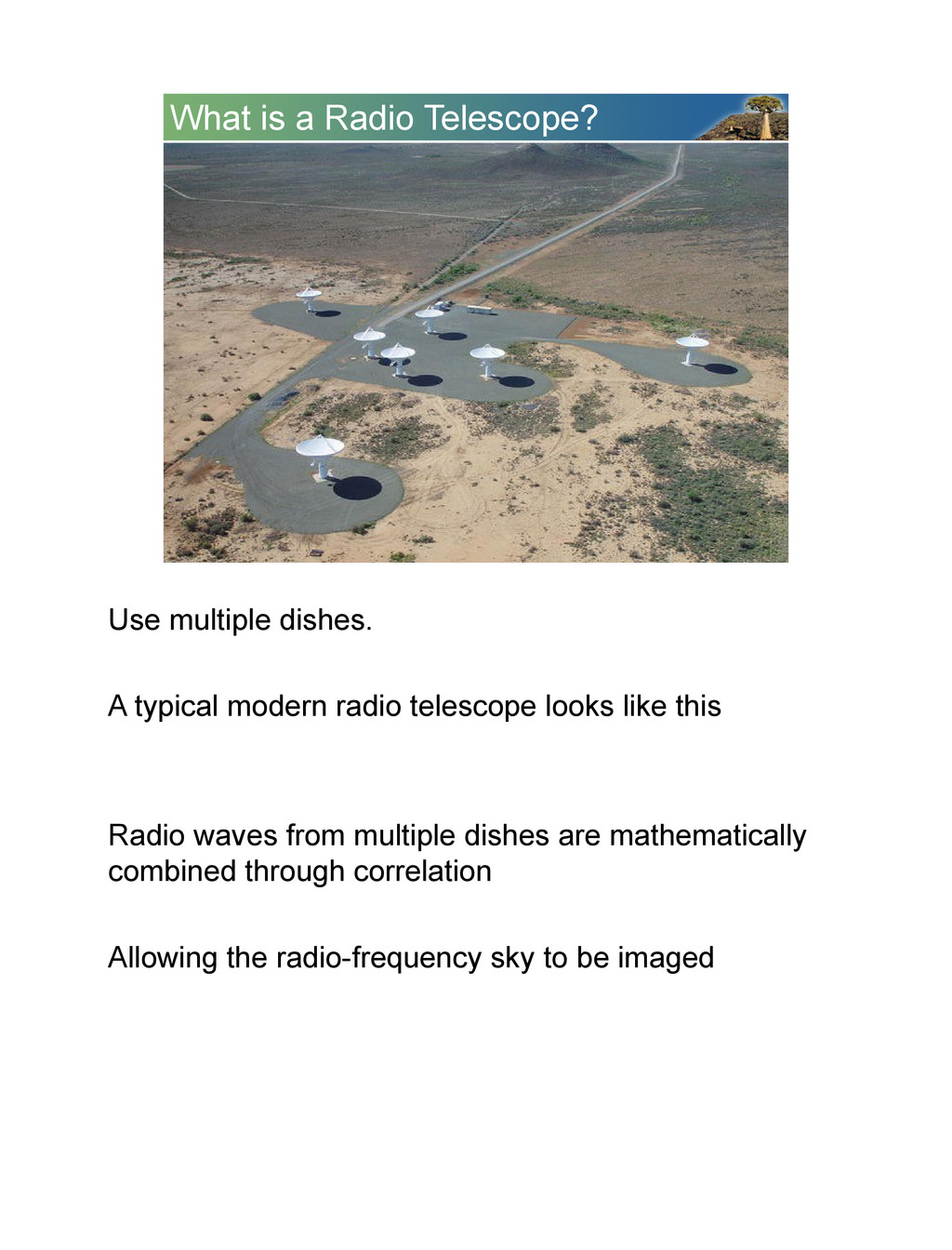
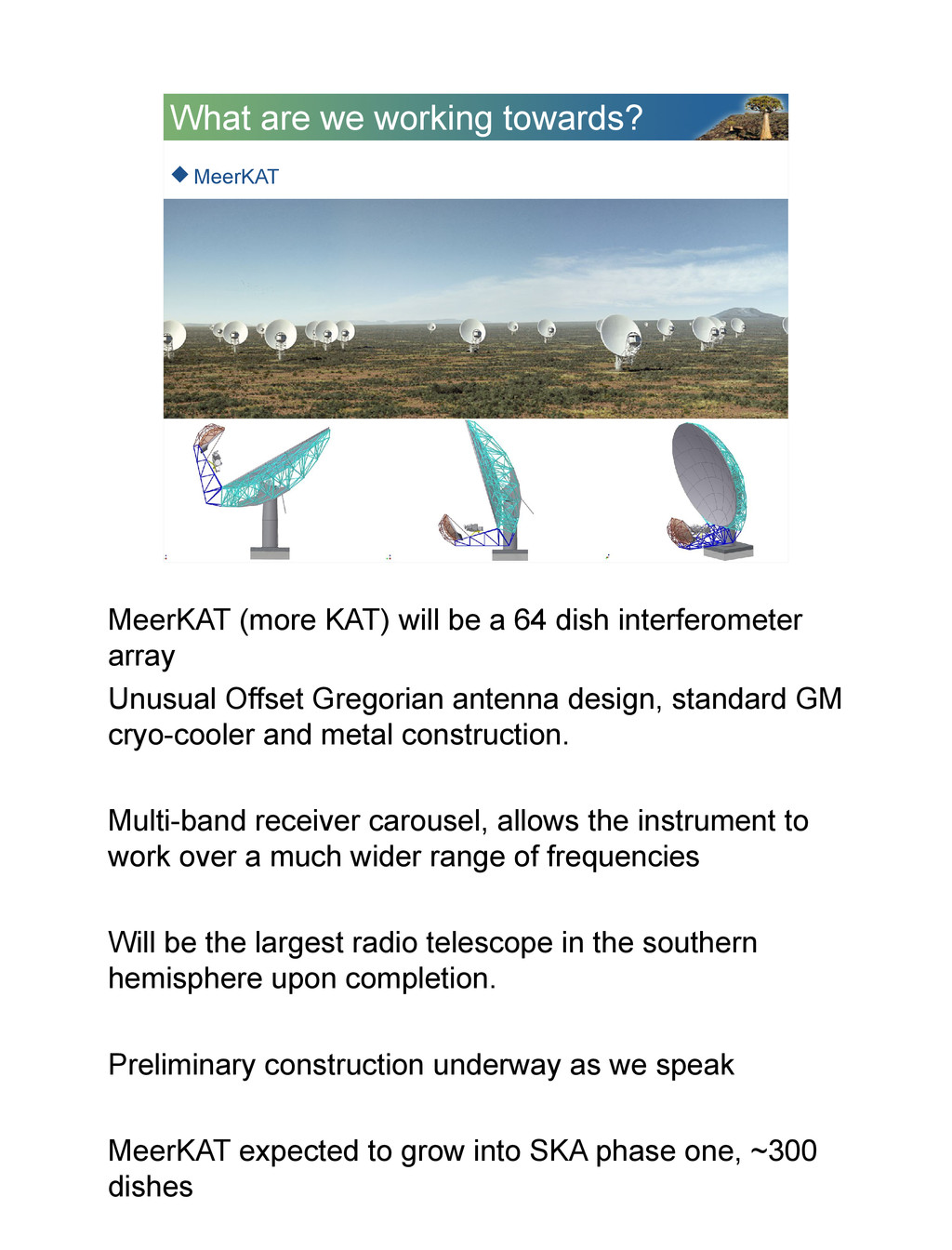
MeerKAT is a 64-dish array radio telescope that is currently under development. When MeerKAT is built in the Karoo it will be a world-class instrument, designed to do groundbreaking science. MeerKAT is scheduled to enter full operation in 2016 and it will be the largest and most sensitive radio telescope in the southern hemisphere until the completion of the Square Kilometre Array (SKA) around 2024. Via MeerKAT, South Africa is playing a key role in design and technology developments in the SKA. KAT-7 is an engineering prototype for the development of MeerKAT. This 7-dish array has already been built in the Karoo and it is currently being commissioned and operated 24x7, producing real scientific results. This talk is about the current Control and Monitoring (CAM) sub-system of KAT-7 and our plans to expand it for MeerKAT. The CAM is a distributed system, running on Linux, and integrates the KAT-7 equipment such as antennas, receivers and ancillary devices, monitoring hardware and software for health, status and alarms, and controlling them as required to perform observations and to provide a human interface for operations. Most of the KAT-7 CAM software is developed in Python.
* Overview (SKA vs MeerKAT vs KAT-7)
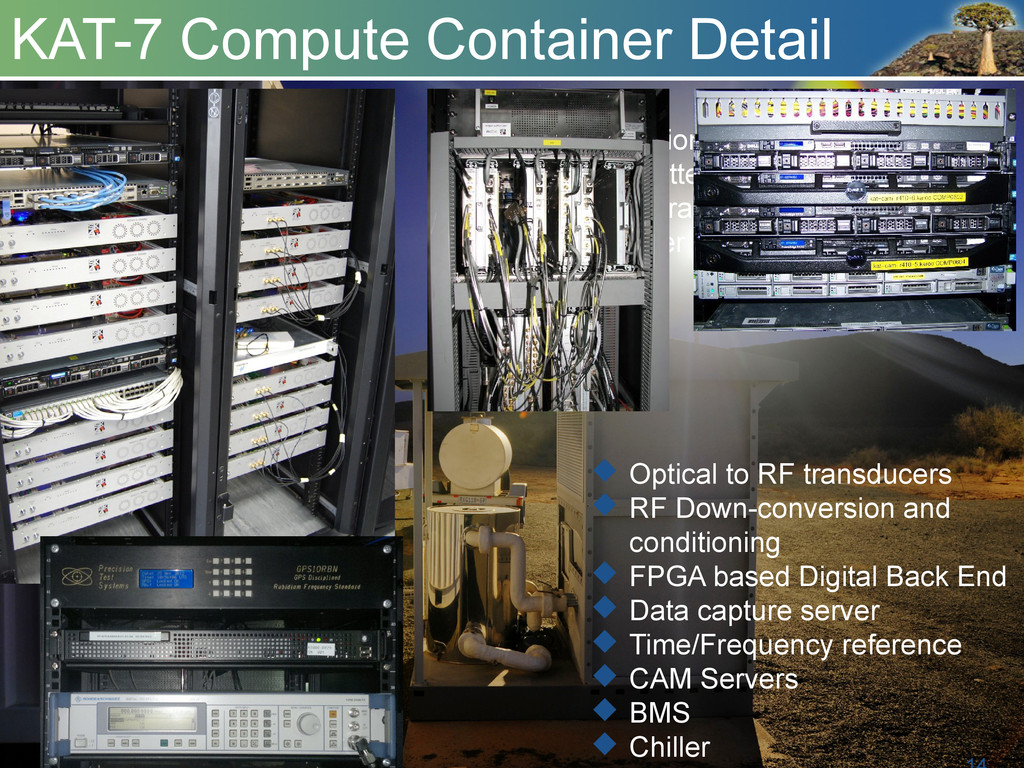
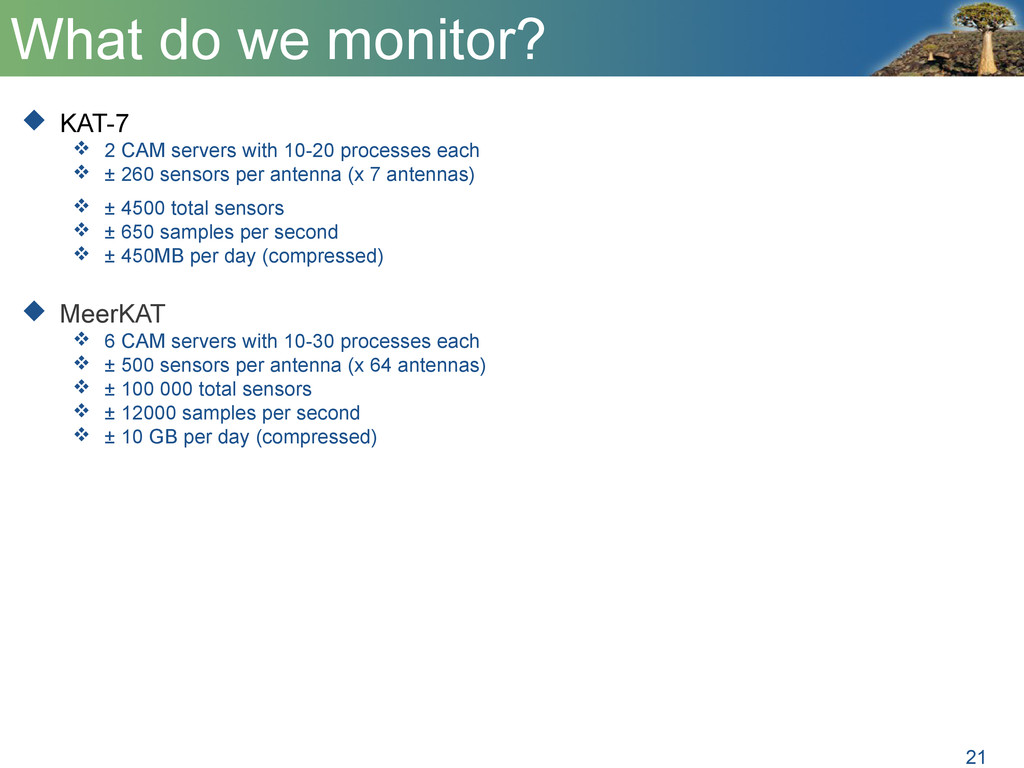
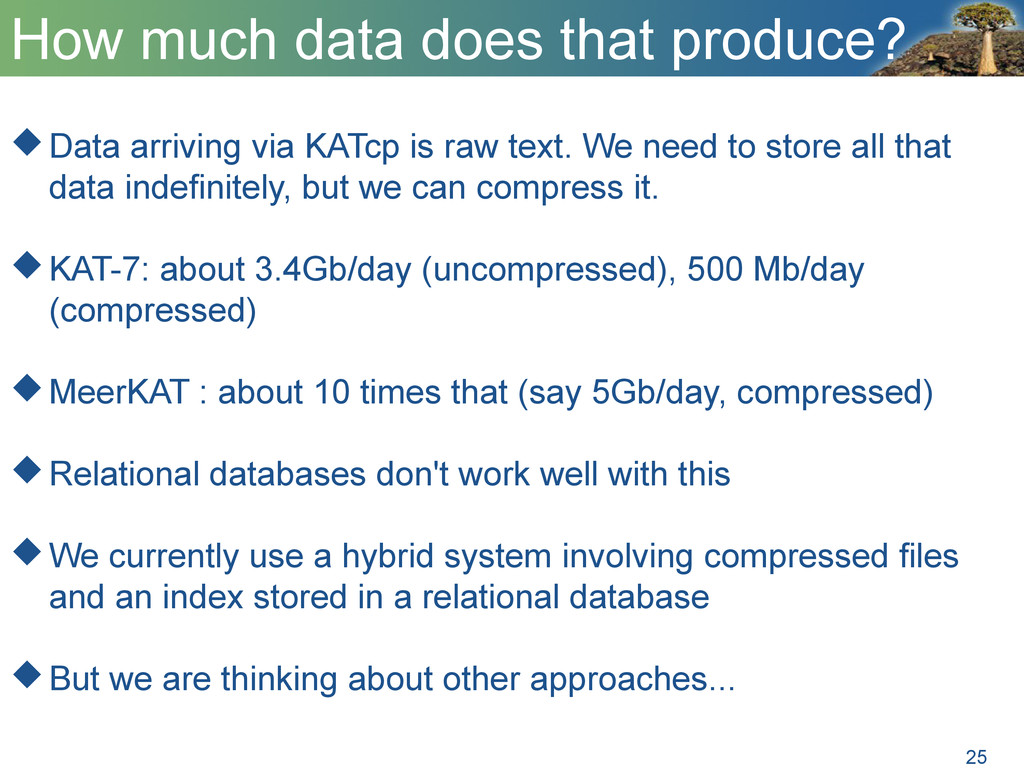
* Description of the problem domain (what we monitor & control, data volumes)
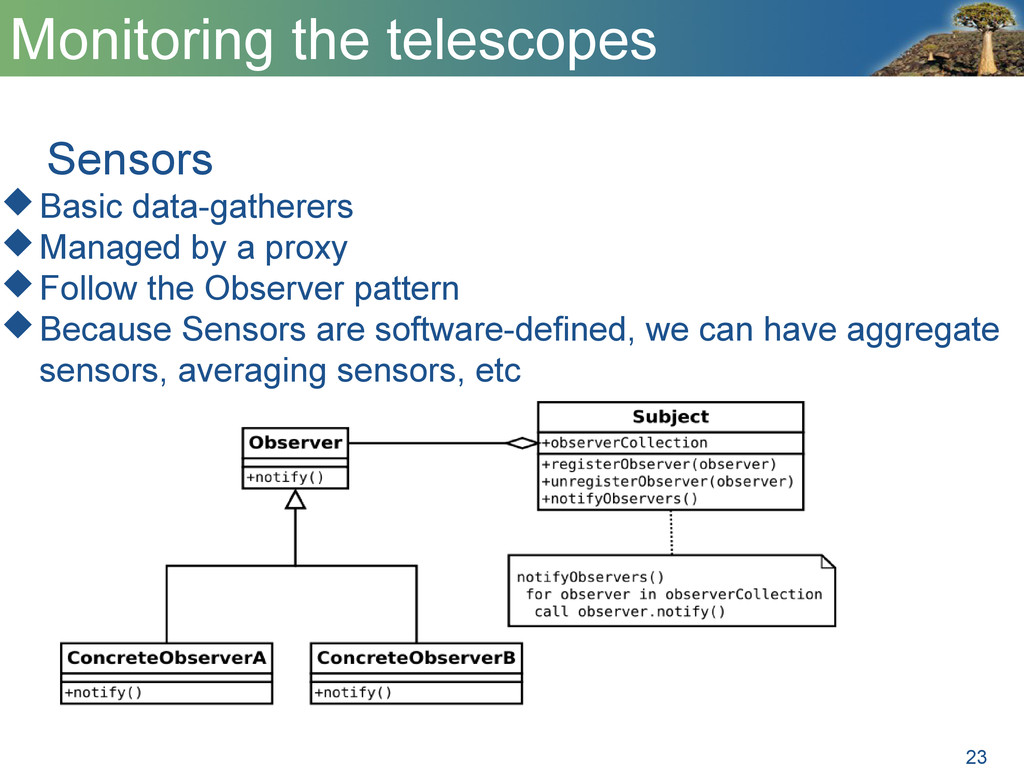
* Architecture of the CAM solution (KATcp, proxies, monitors)
* Overview of the iPython user interface
* Overview of the KAT GUI
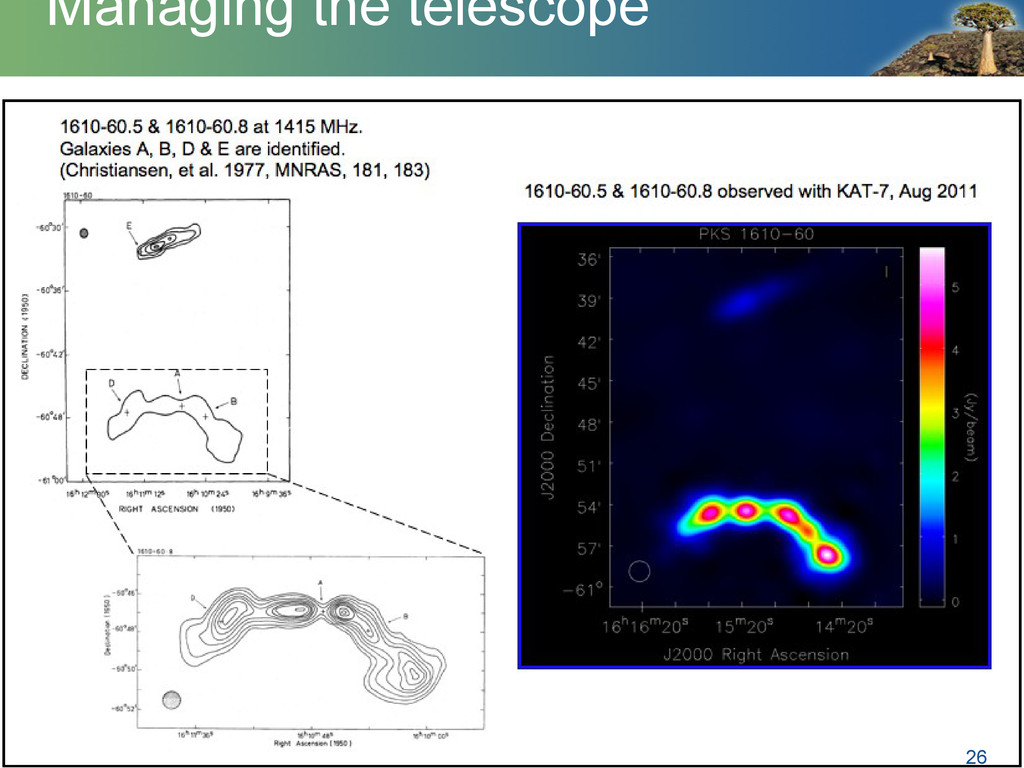
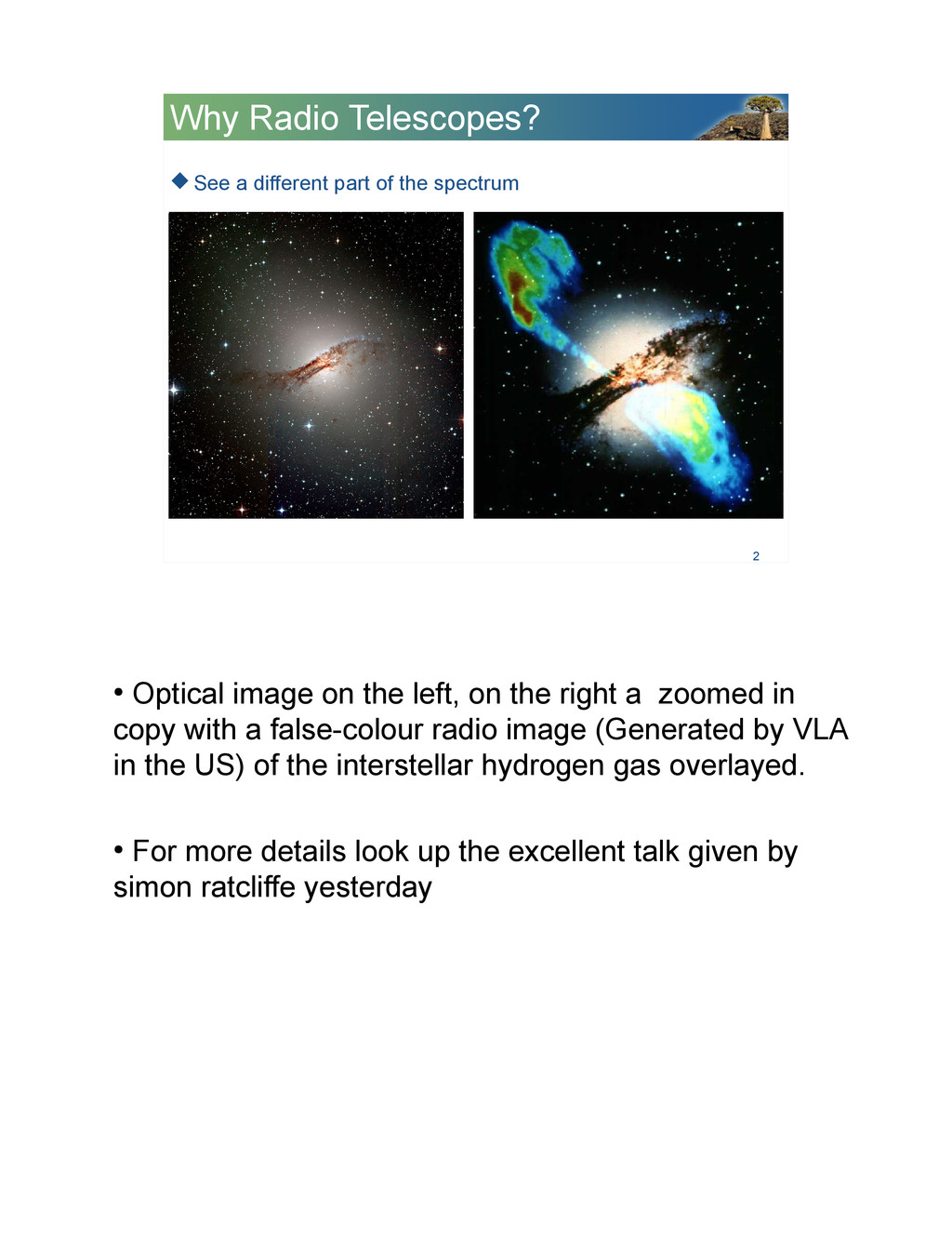
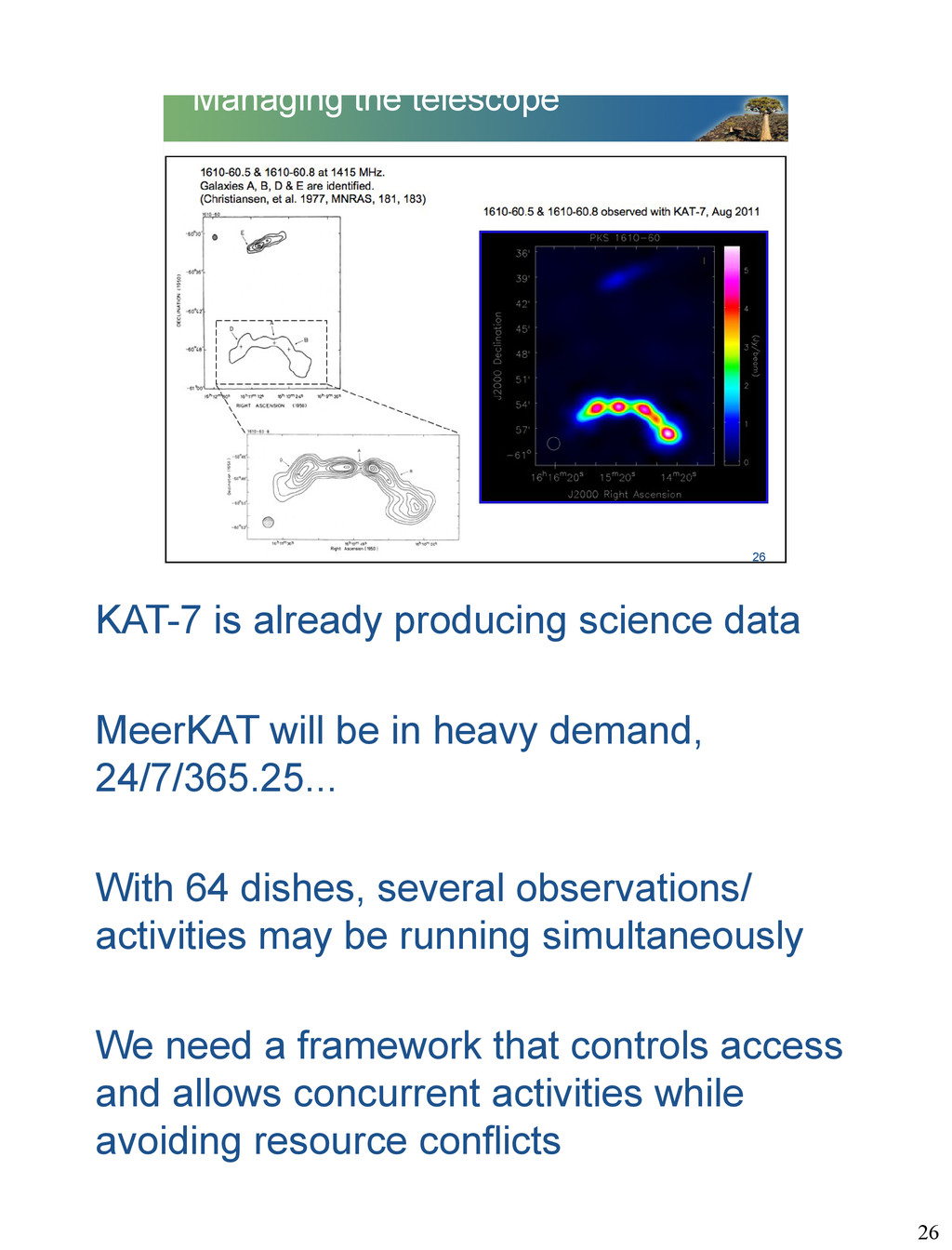
* Real radio images produced by KAT-7
* Live demo (via webcam) of remote control of the KAT-7 dishes using the GUI
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![30 30 Thank you! http://www.ska.ac.za Questions? [email protected] [email protected]](https://files.speakerdeck.com/presentations/5077e6881d371f000202ee4c/slide_29.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![30 30 Thank you! http://www.ska.ac.za Questions? [email protected] [email protected]](https://files.speakerdeck.com/presentations/5077e6881d371f000202ee4c/slide_59.jpg){kind=link}