Share
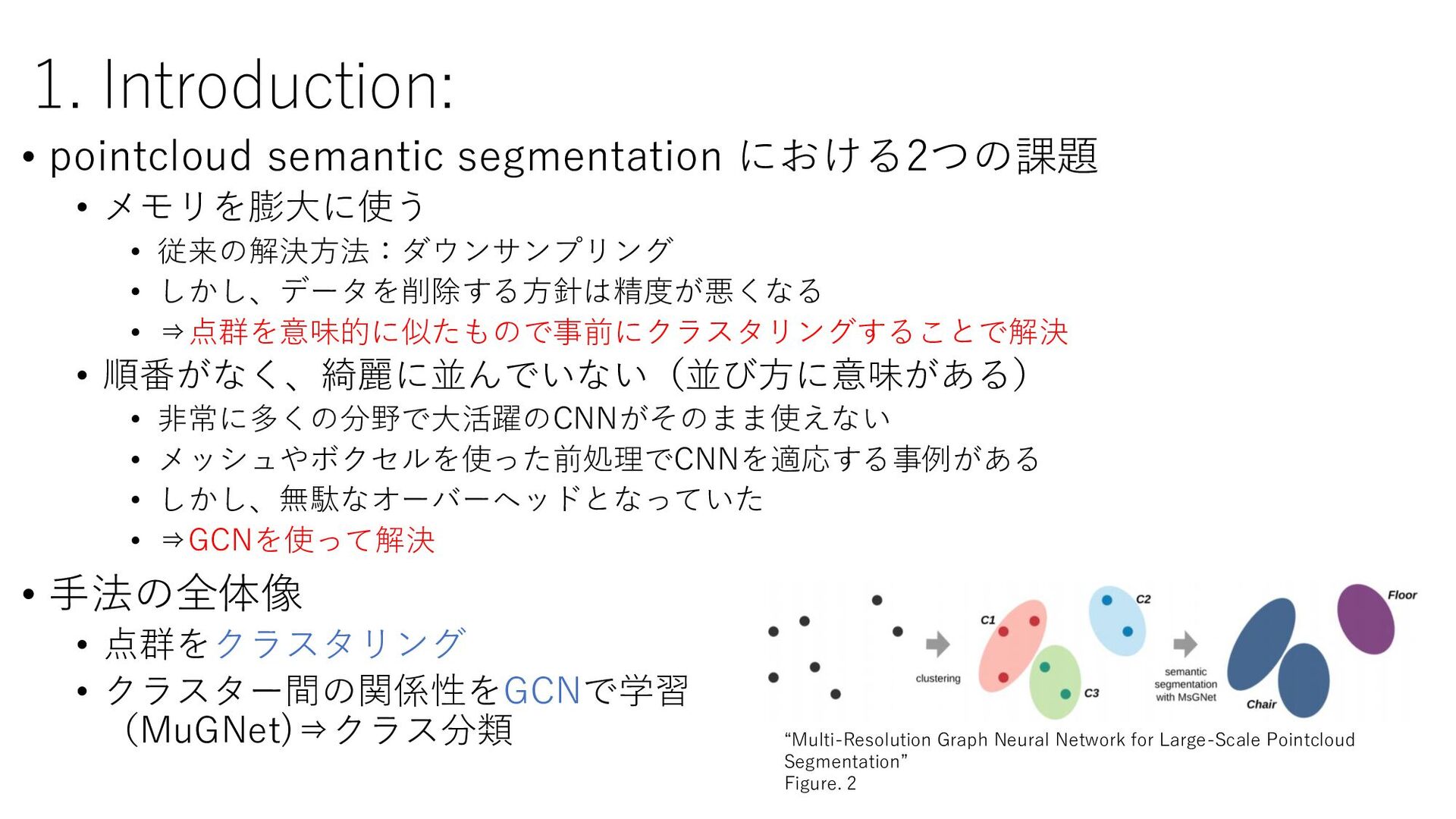
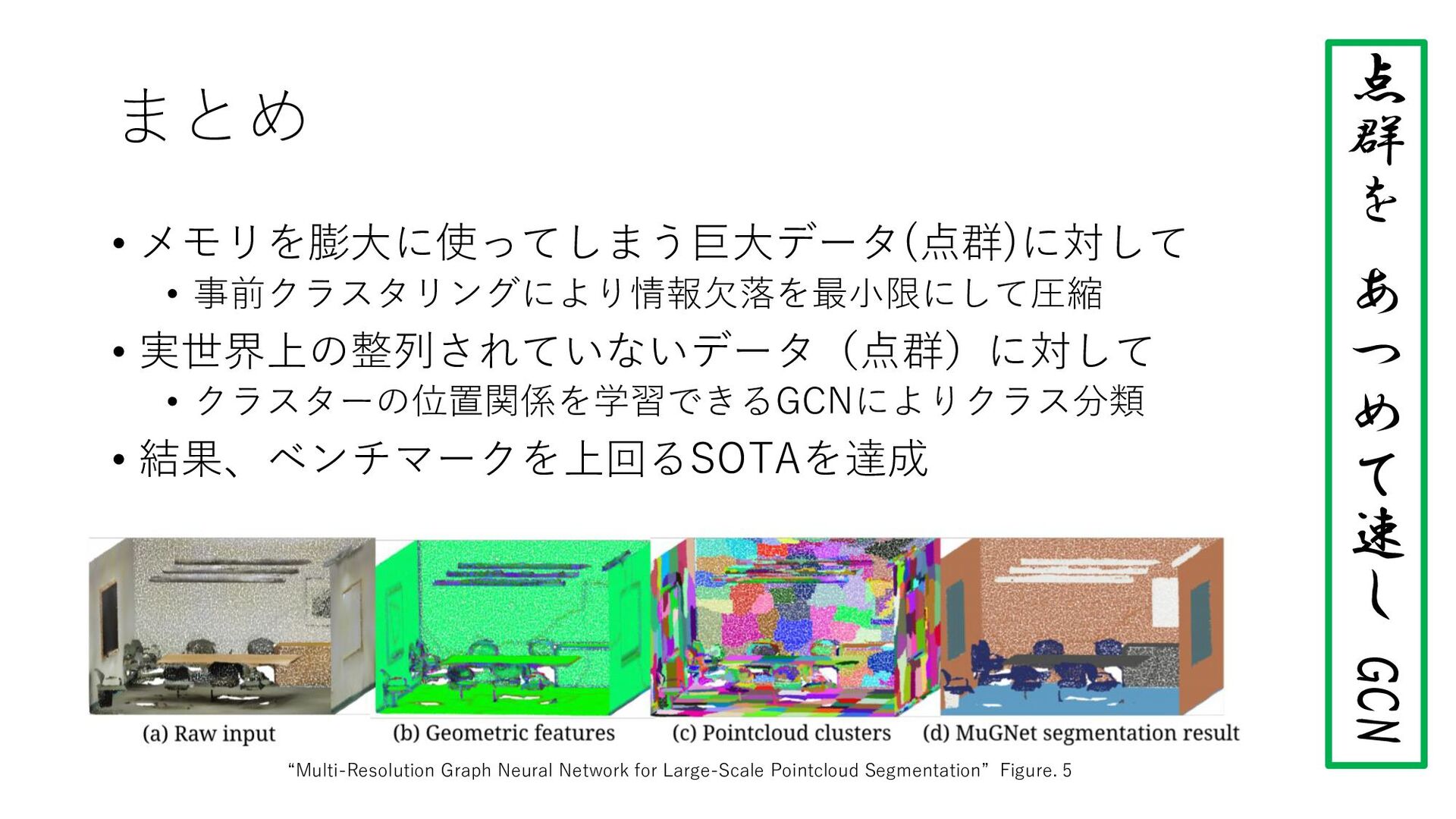
Multi-Resolution Graph Neural Network for Large-Scale Pointcloud Segmentation https://arxiv.org/abs/2009.08924
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![3.2 Cluster-feature Embedding • 各クラスタの点群には、[15]にある特徴量が付随されている • 各クラスタごとに、3つの解像度を用意し、それぞれNNを通す • 3つの解像度は、最も細かい生の点群と、ダウンサンプリングした2種類粗い点群で構成される。 •](https://files.speakerdeck.com/presentations/8f605cd502824c0690ed1f615d076c28/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}