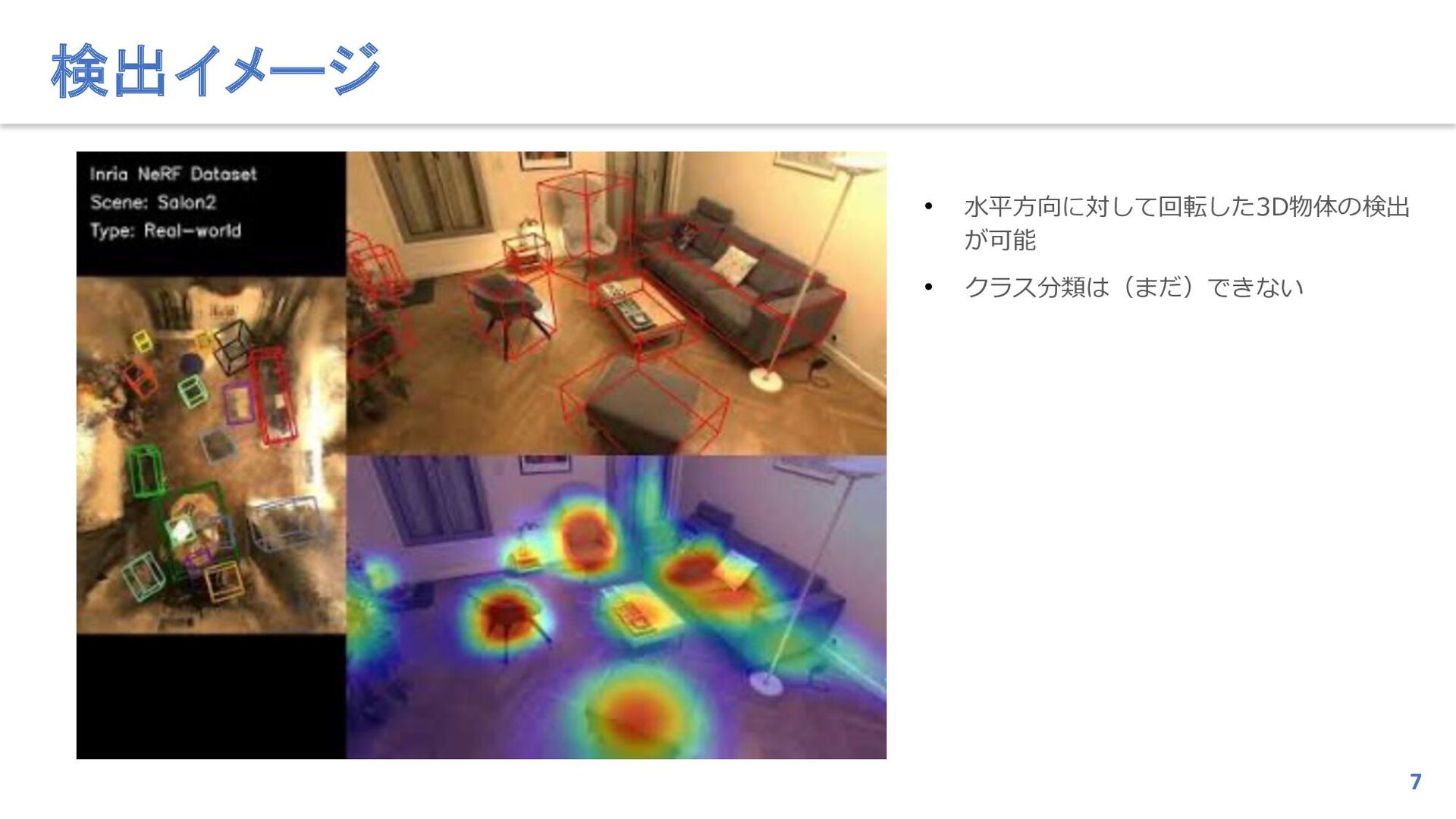
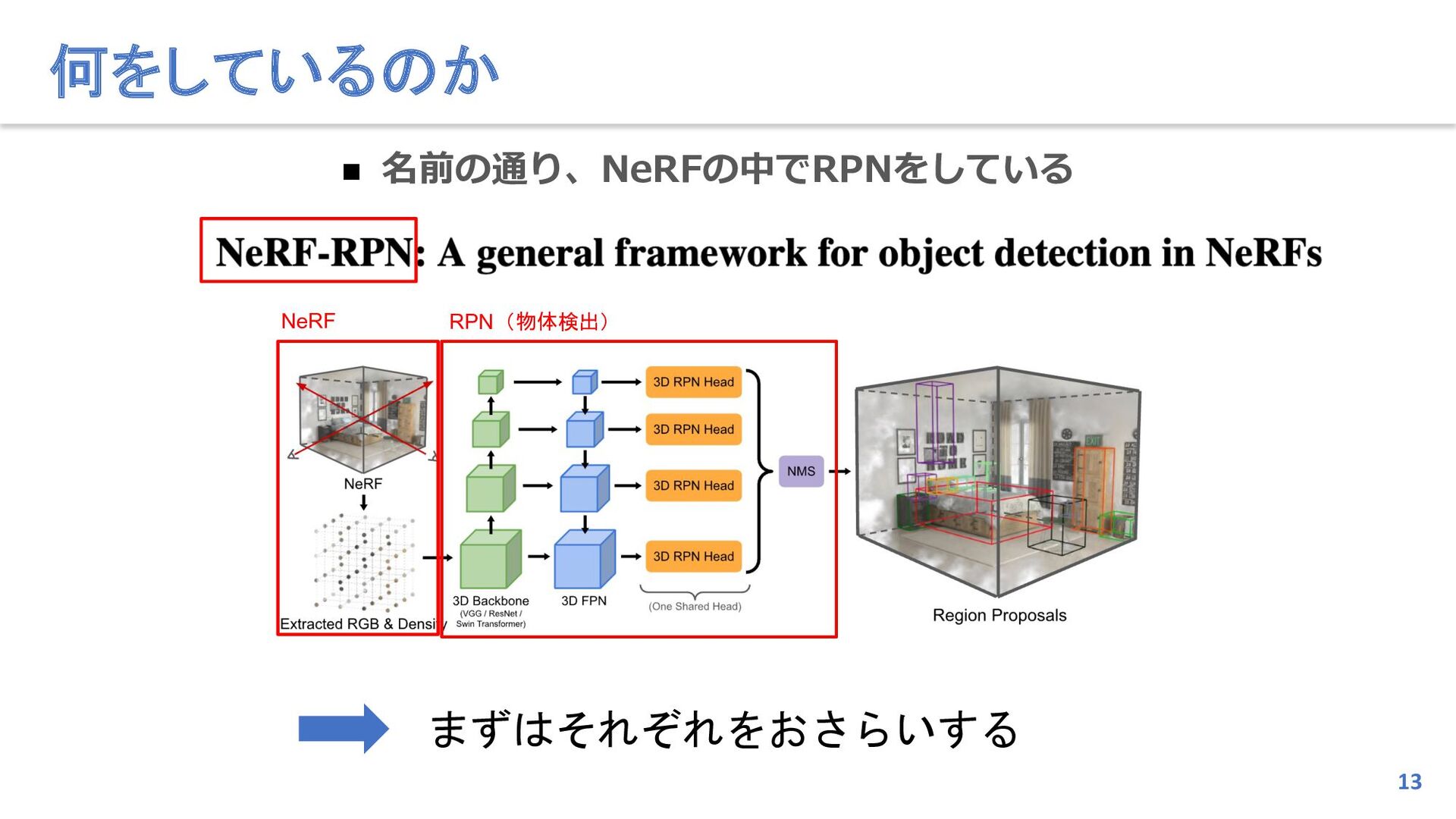
Science and Technology) et al., “NeRF-RPN: A general framework for object detection in NeRFs”, CVPR2023. [1] n NeRFの中で物体検出する⼿法 • 1)NeRFする • 2) NeRF空間をボクセル化し離散化した各座標における⾊の平均 と密度を求める • 3)2)に対してOriented R-CNNを⽤いて3D物体検出を⾏う ※NeRFのための物体検出を評価する際のベンチマークとなるデータセ ットも構築 1) 3) 2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![6 どんな論文? [1] Hu B (The Hong Kong University of](https://files.speakerdeck.com/presentations/38e246c310694a9e94826b25c4130d90/slide_6.jpg){kind=link}
{kind=link}
{kind=link}
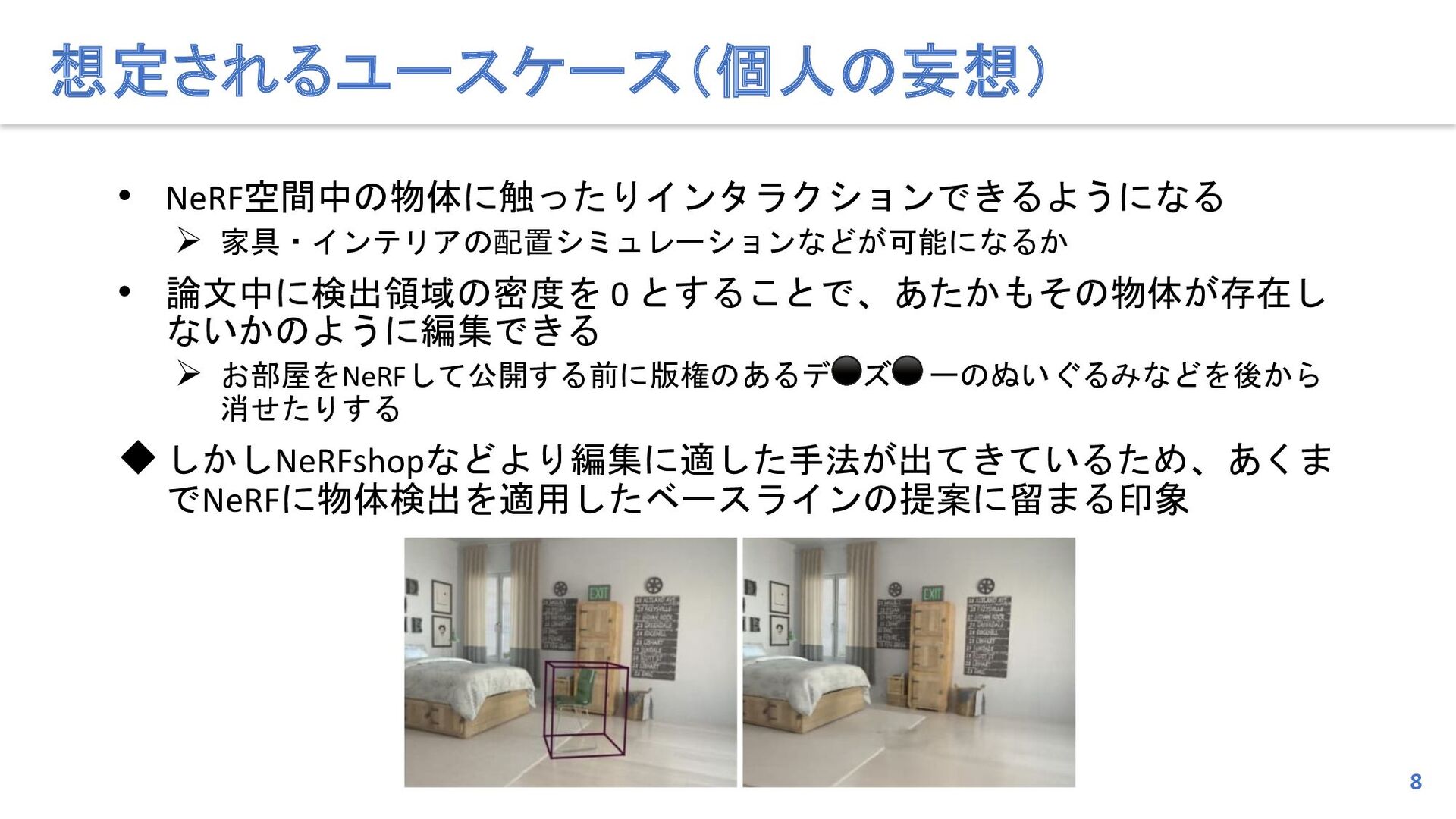
![• NeRF空間中の物体をポリゴン形式で捉えて動かし編集したり することが可能 9 参考: NeRFshop [2] Clément Jambon et](https://files.speakerdeck.com/presentations/38e246c310694a9e94826b25c4130d90/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}