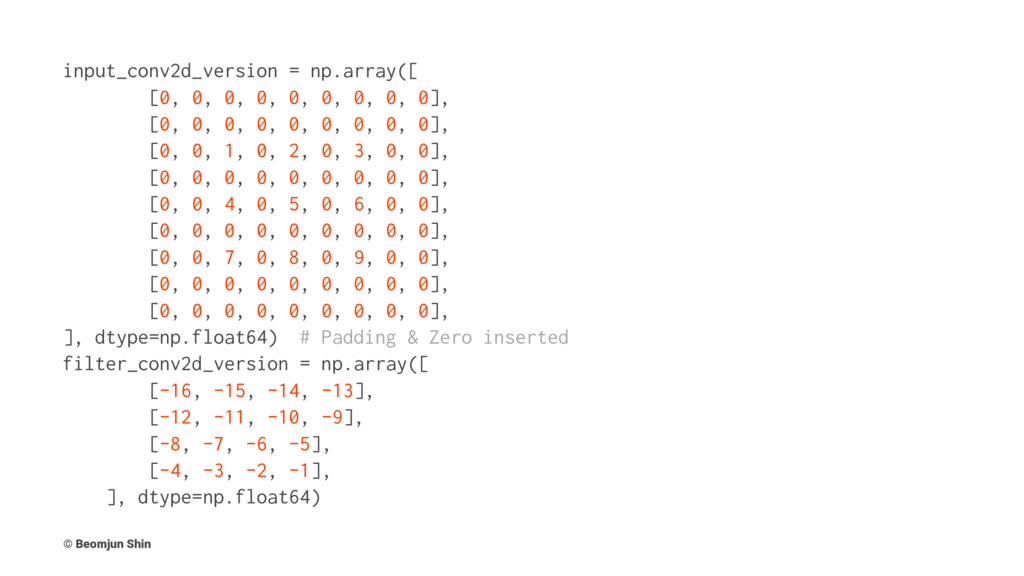
0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 1, 0, 2, 0, 3, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 4, 0, 5, 0, 6, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 7, 0, 8, 0, 9, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0, 0, 0], ], dtype=np.float64) # Padding & Zero inserted filter_conv2d_version = np.array([ [-16, -15, -14, -13], [-12, -11, -10, -9], [-8, -7, -6, -5], [-4, -3, -2, -1], ], dtype=np.float64) © Beomjun Shin
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![Mismatch (...) [TODO..] © Beomjun Shin](https://files.speakerdeck.com/presentations/e675f9f1d4a74342b2313cc7bd60a4e7/slide_26.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}