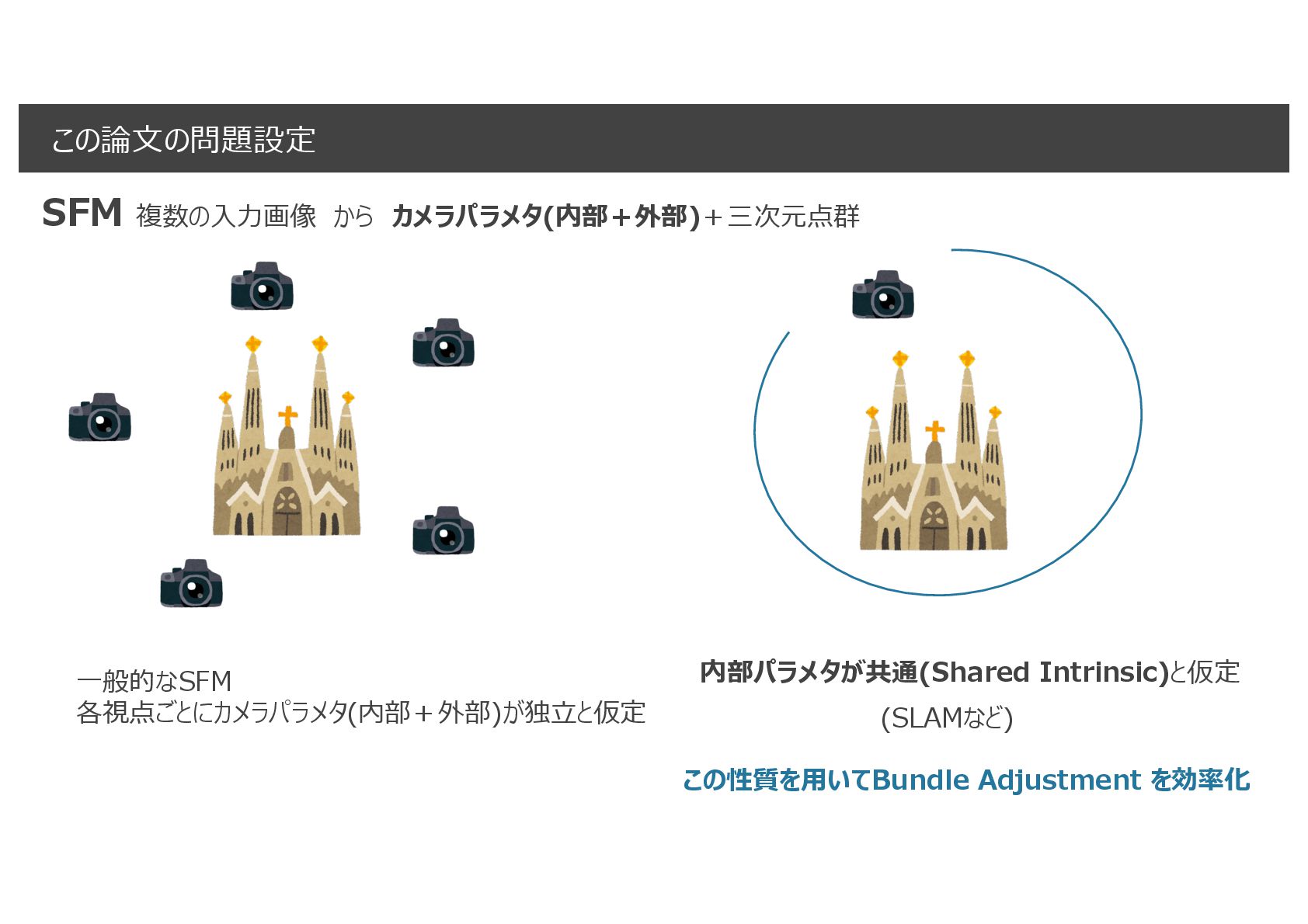
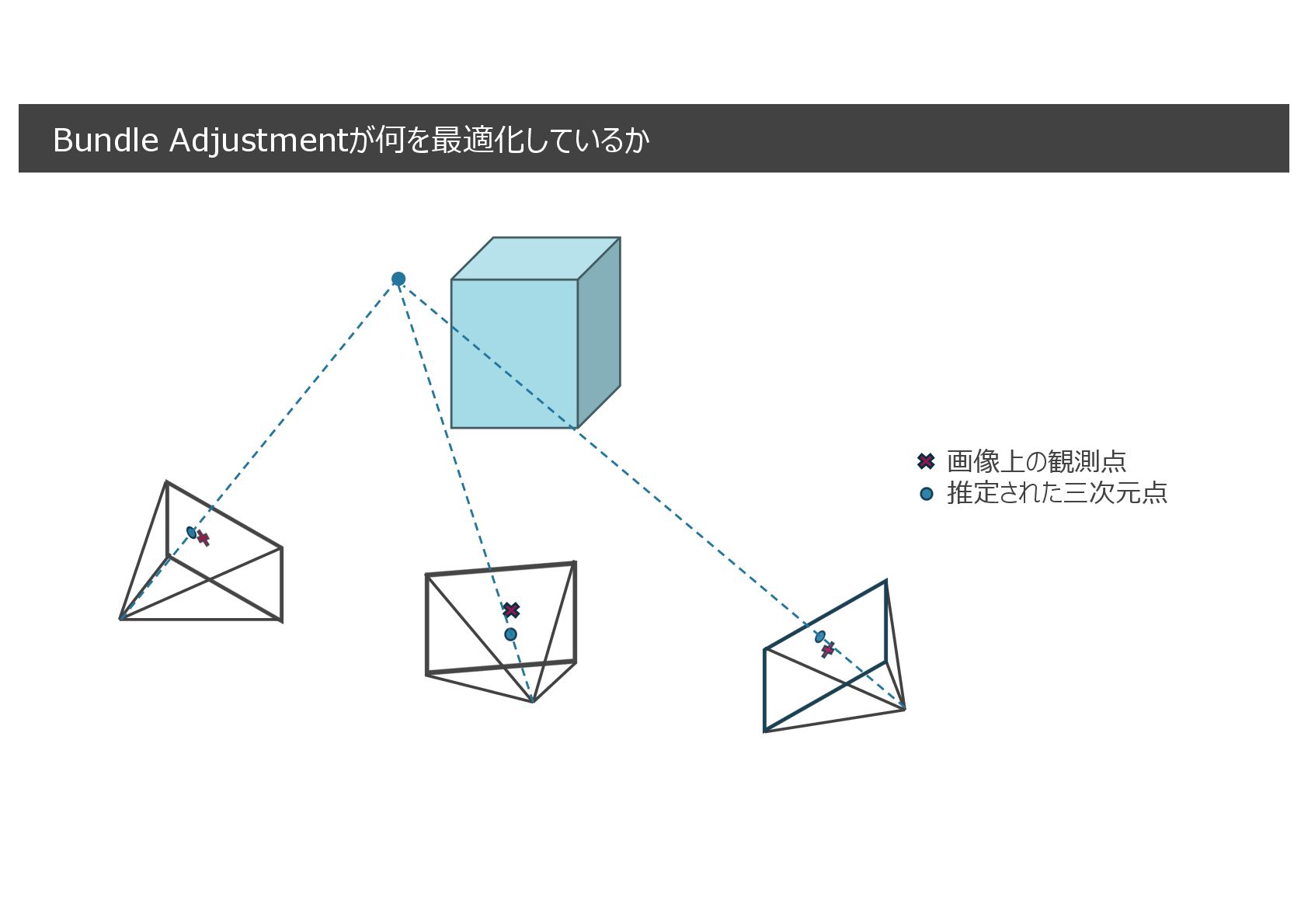
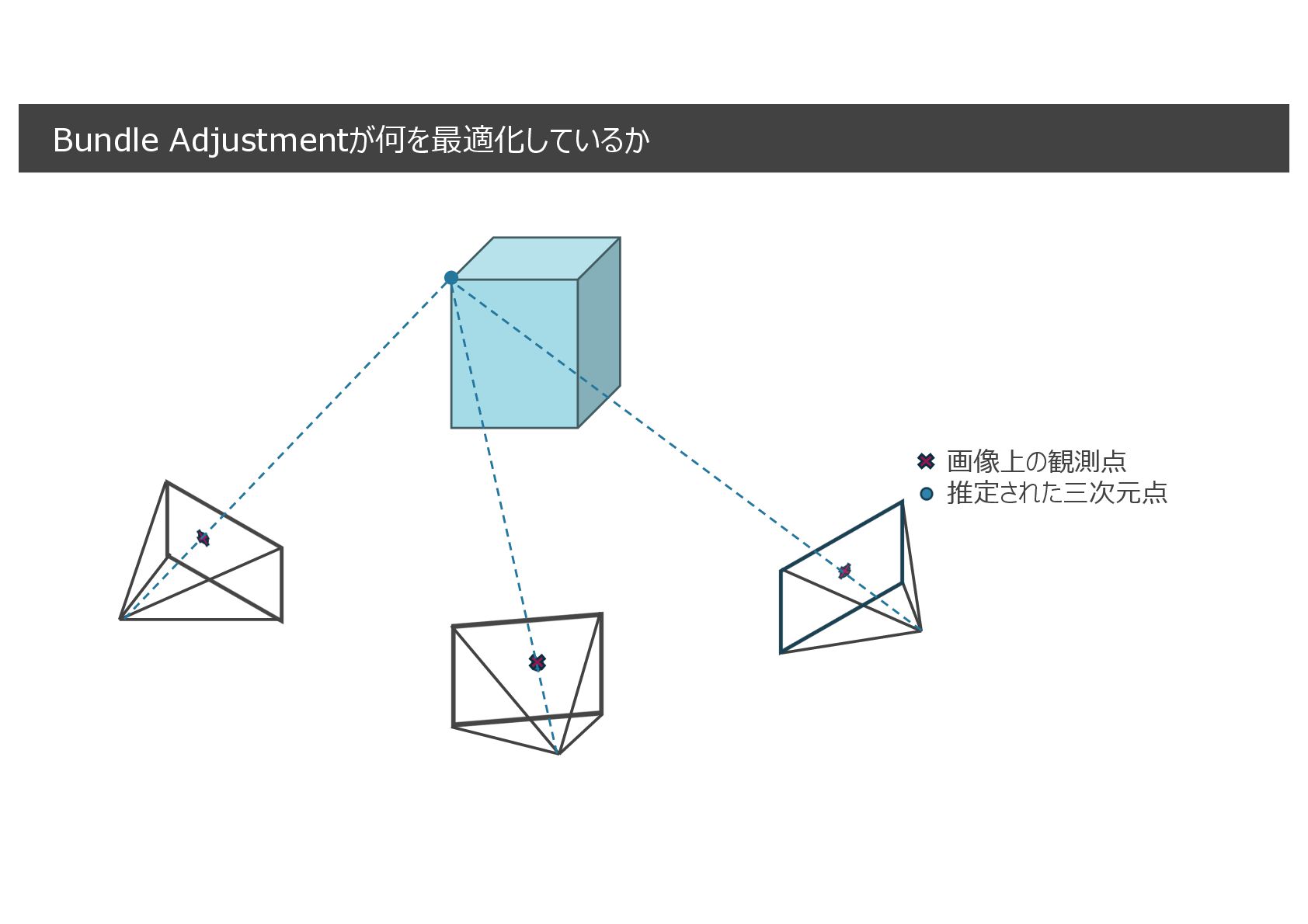
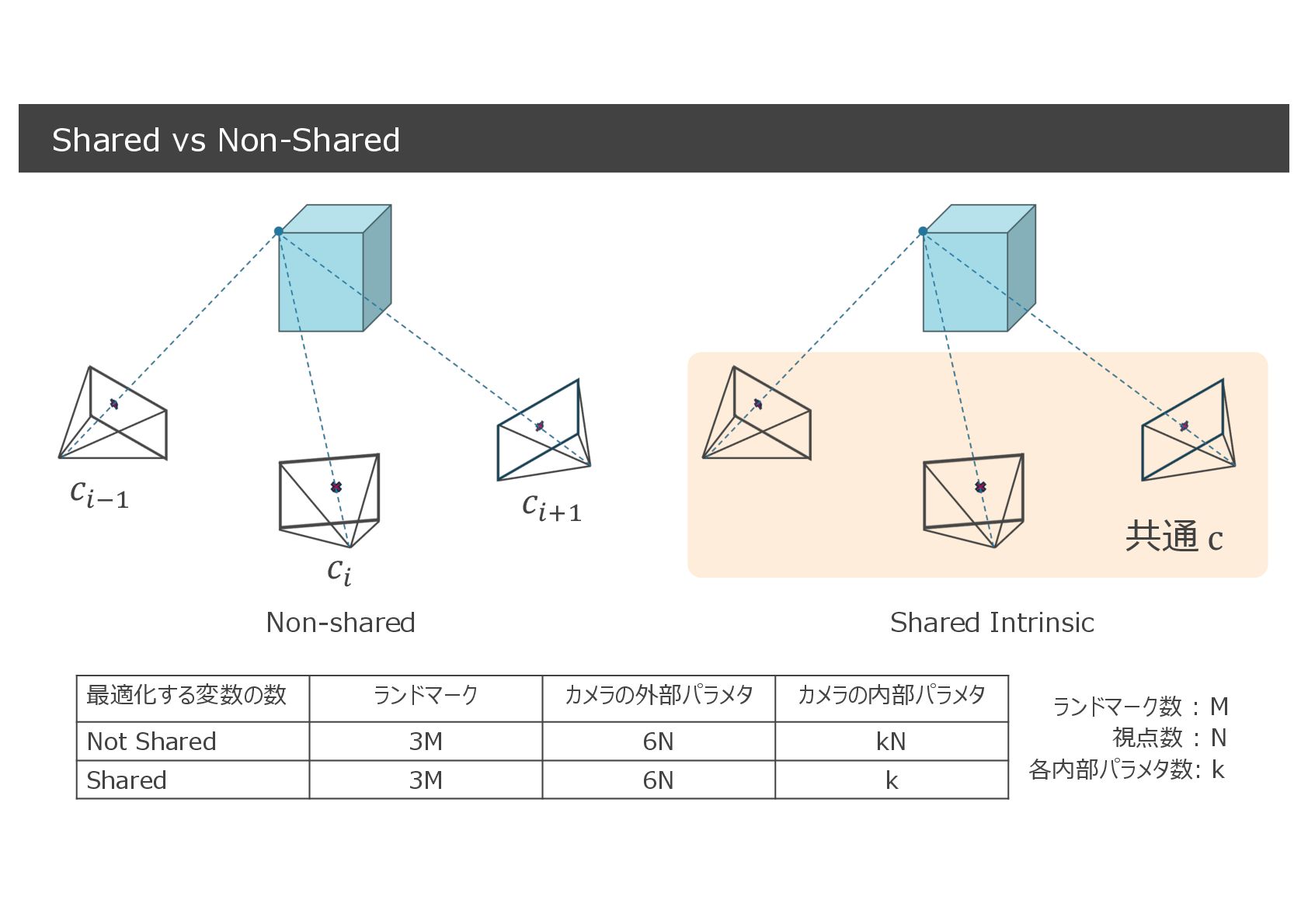
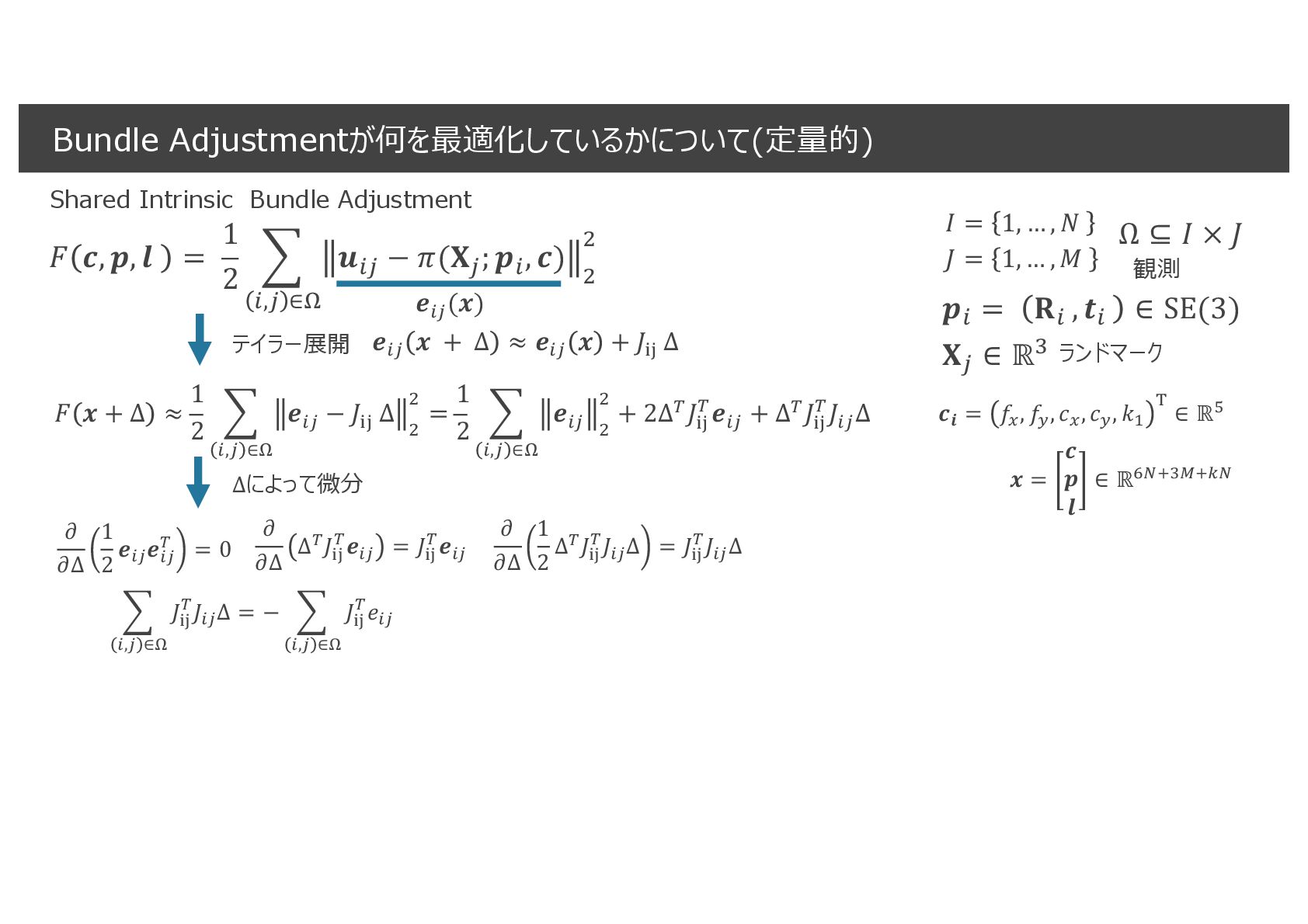
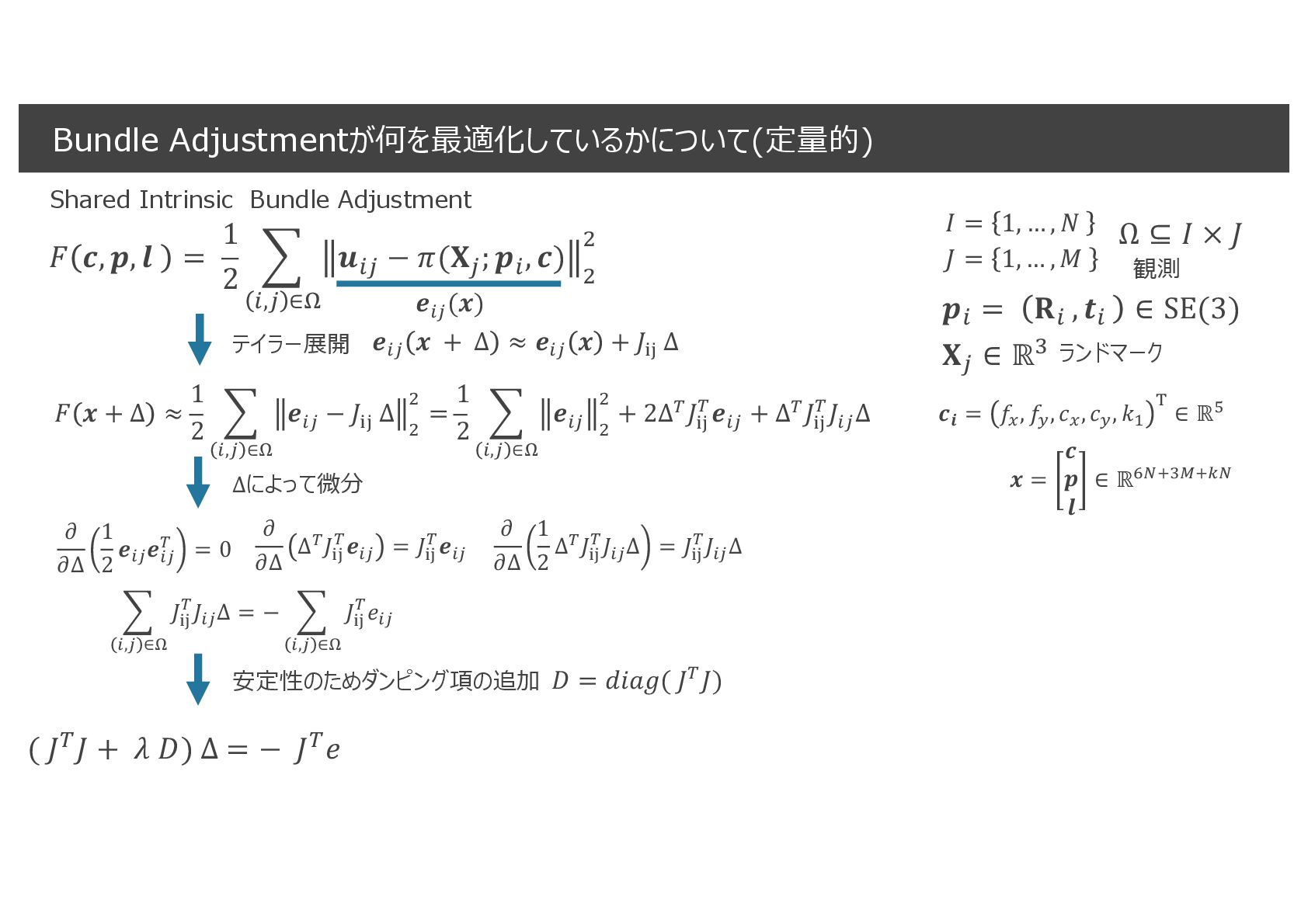
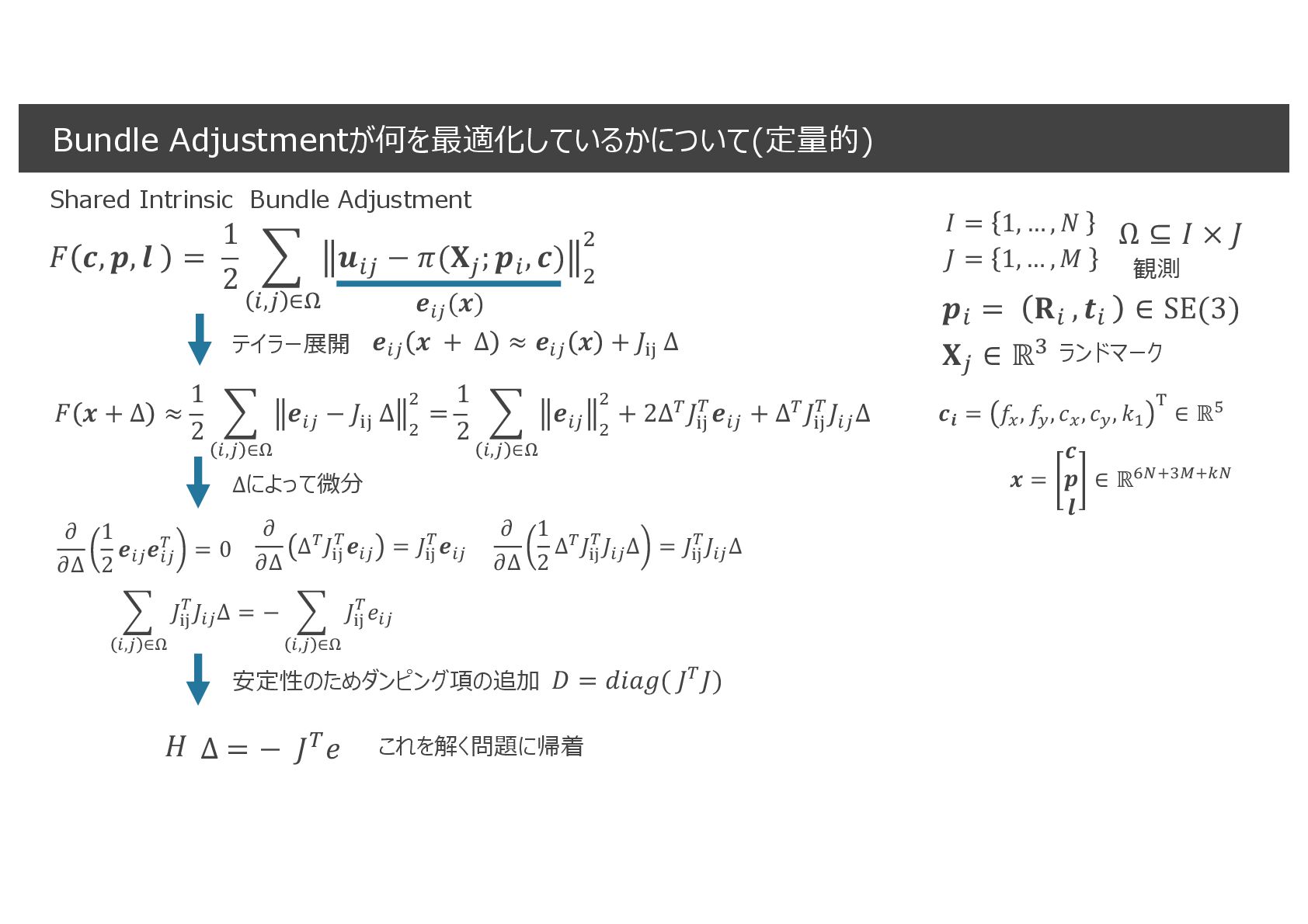
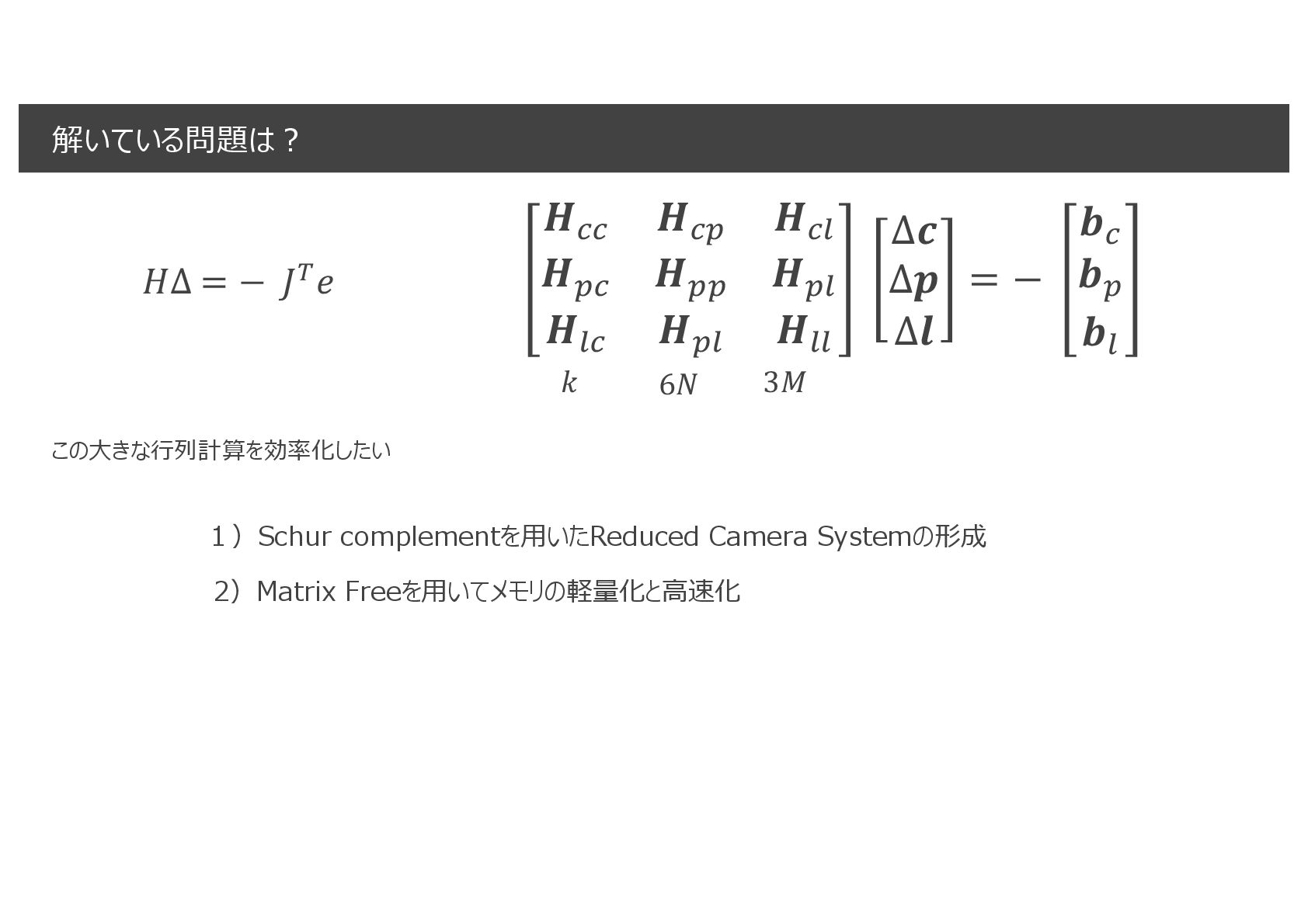
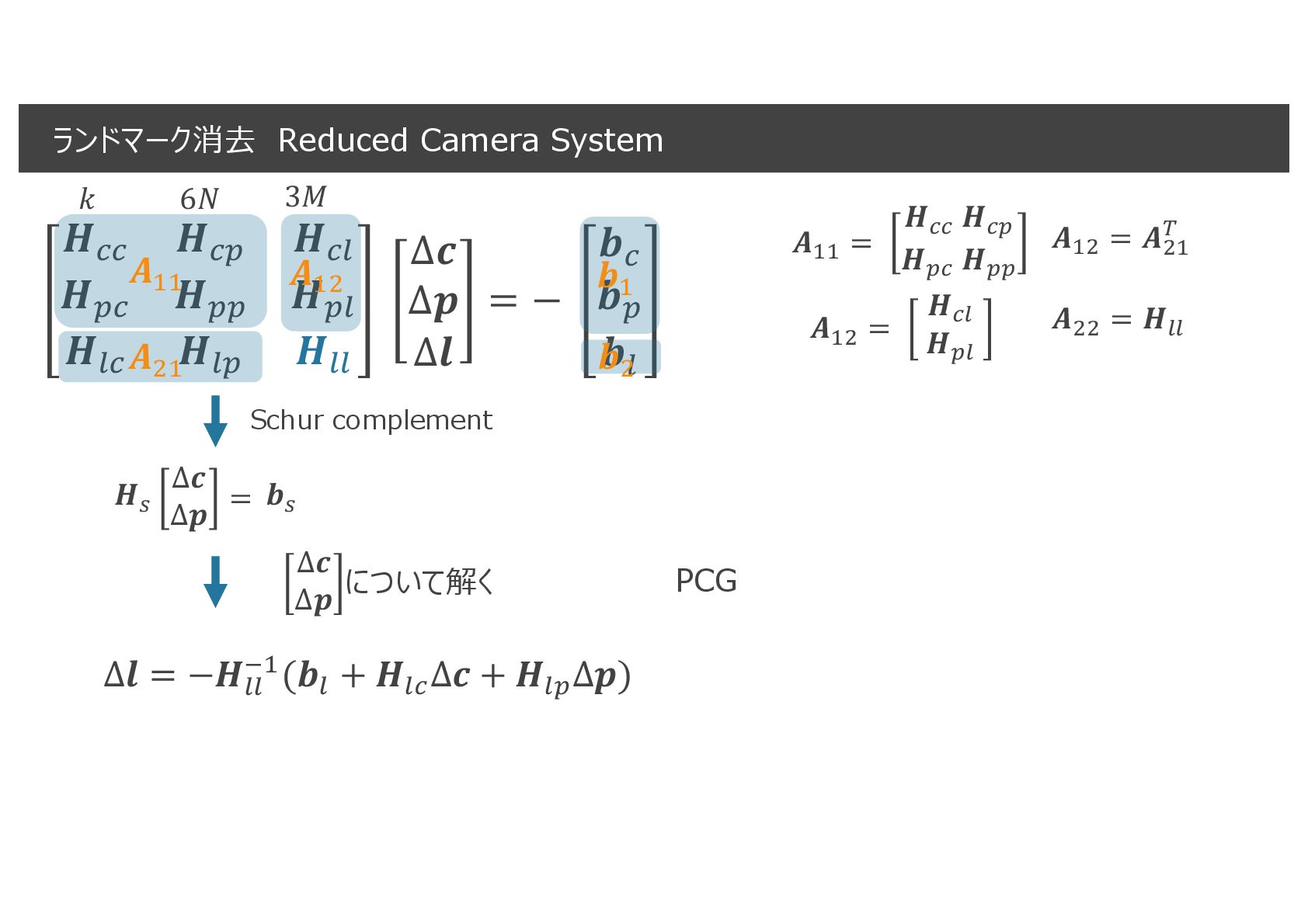
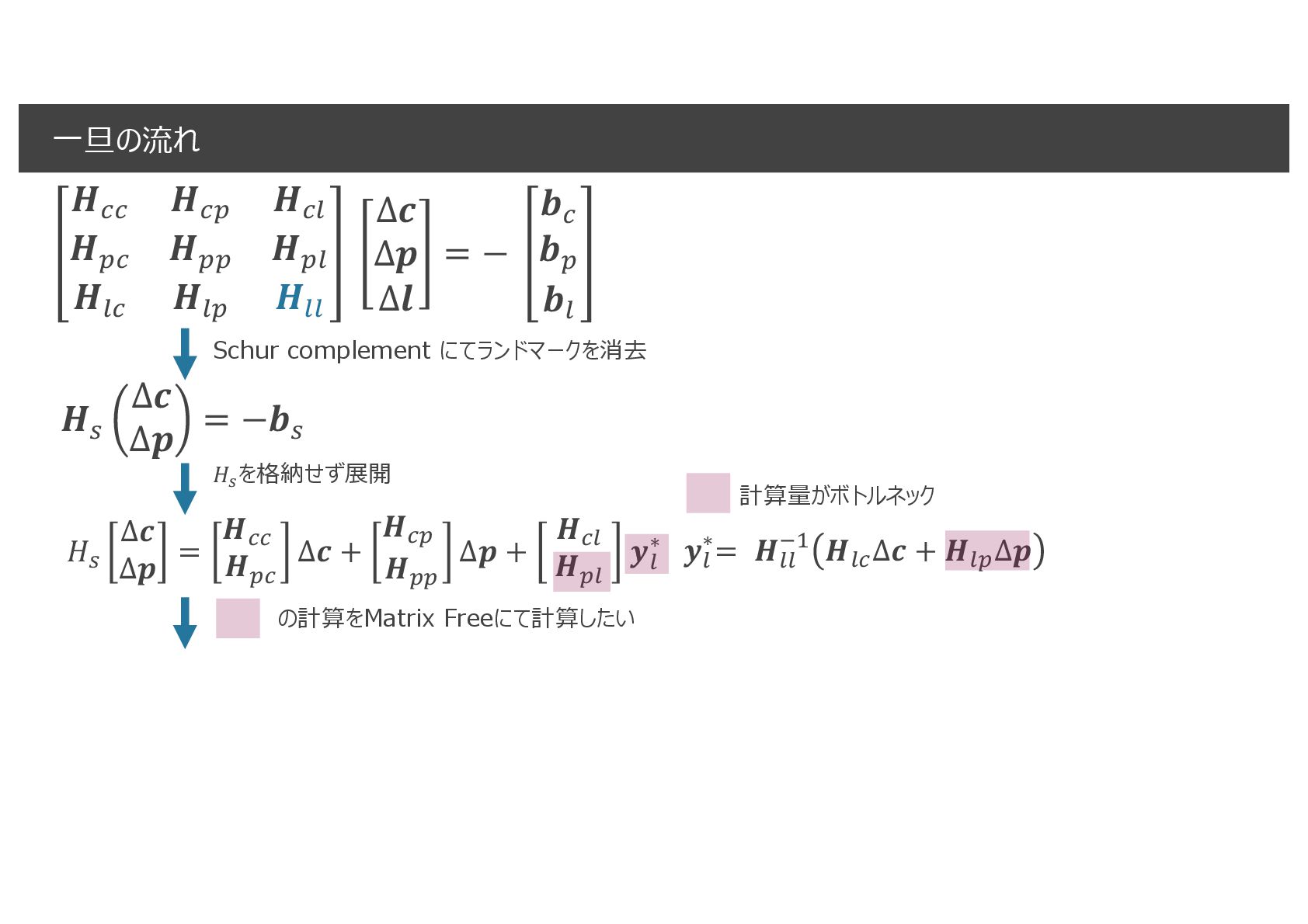
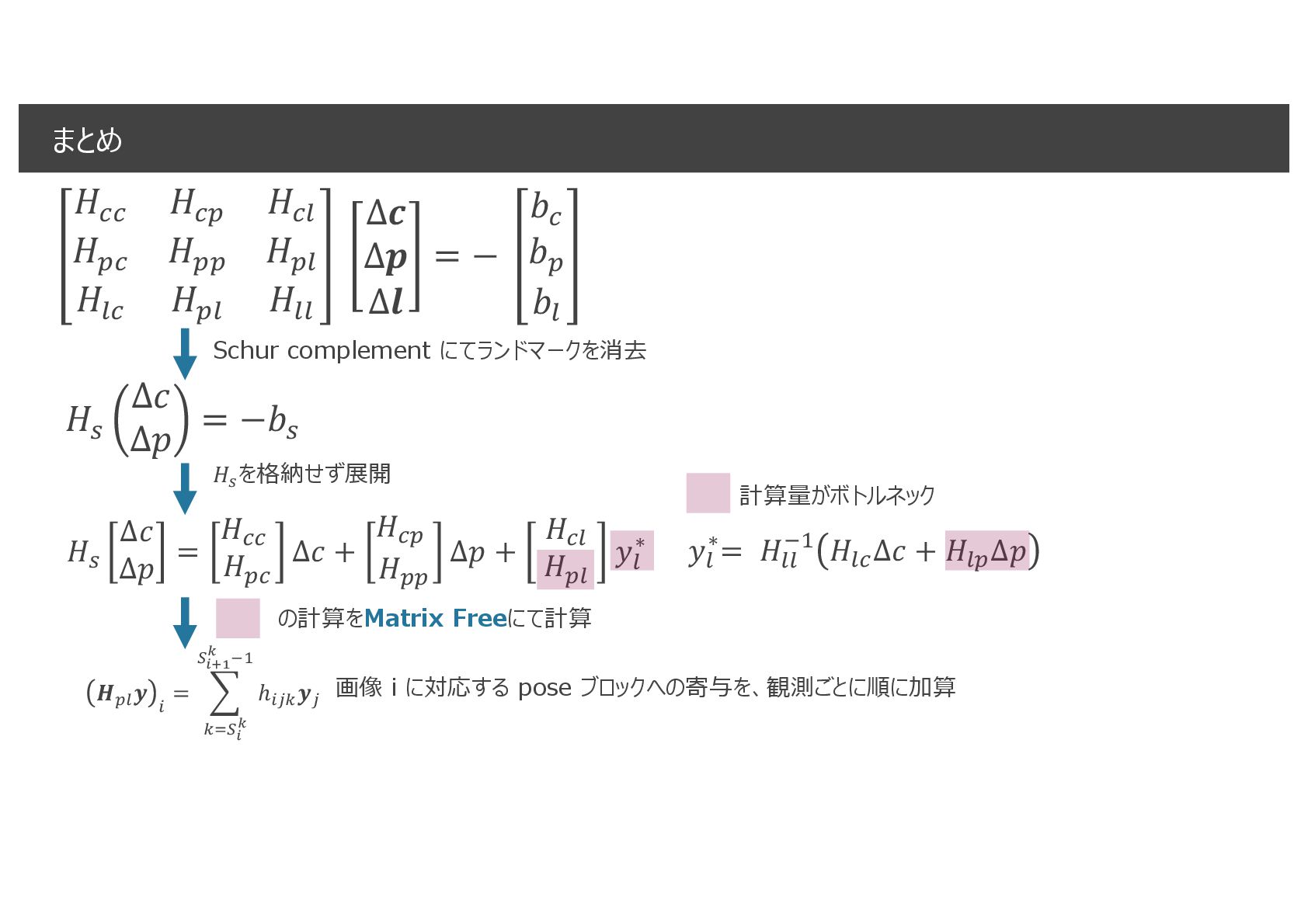
- 従来の Bundle Adjustment (BA) は,各カメラの内部パラメータを個別に最適化するため Hessian が肥大化し,計算・メモリ両面でボトルネックとなる
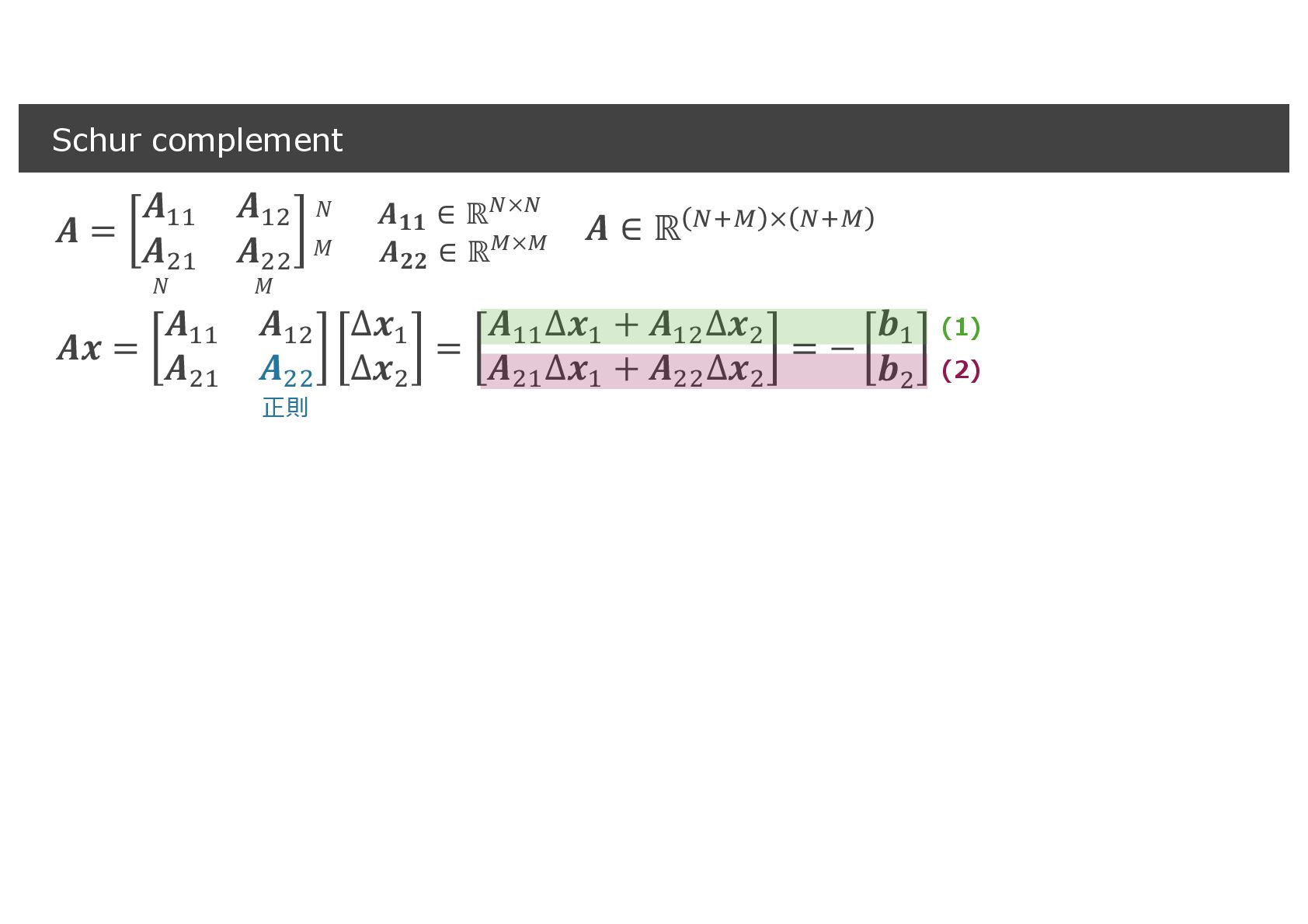
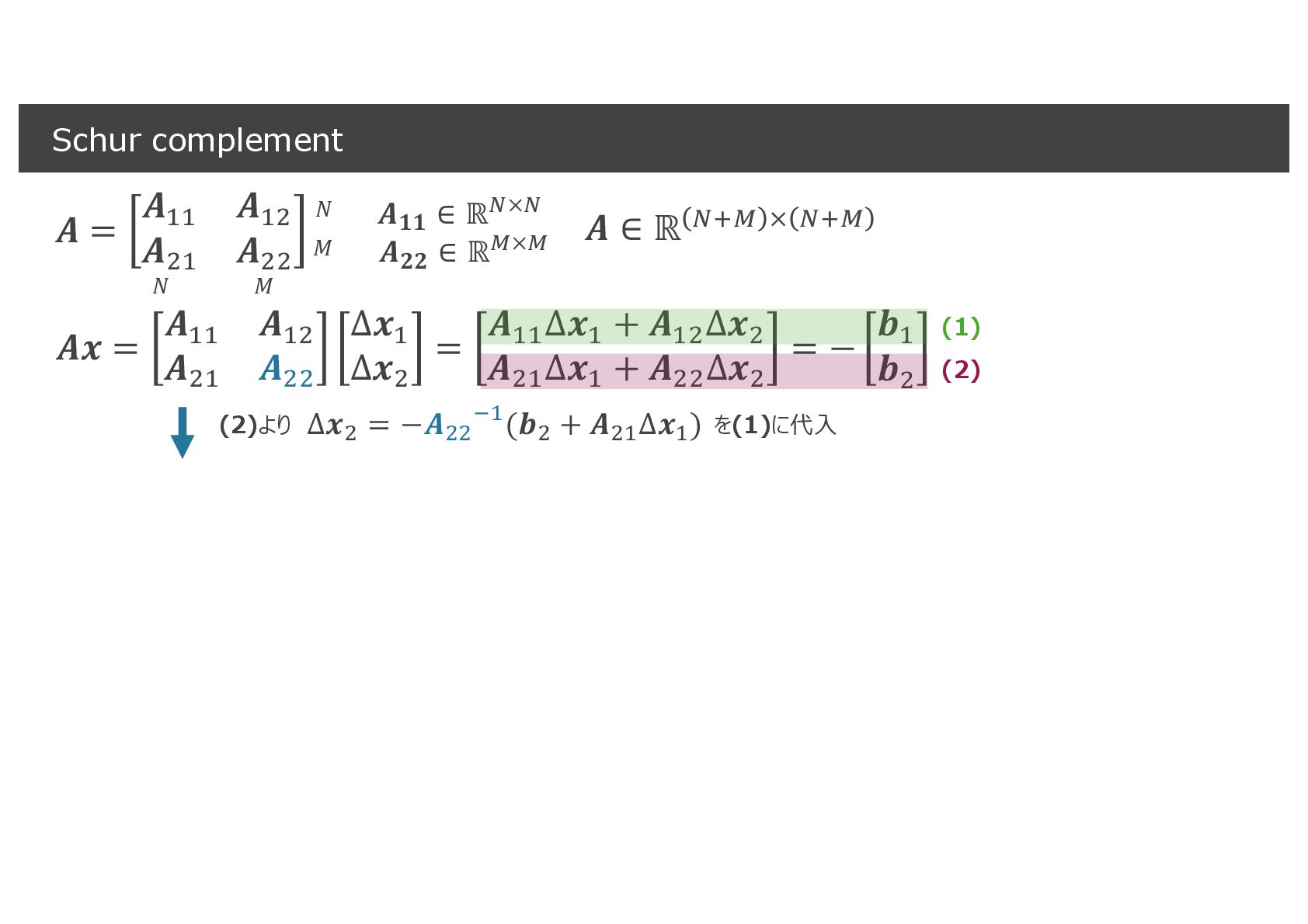
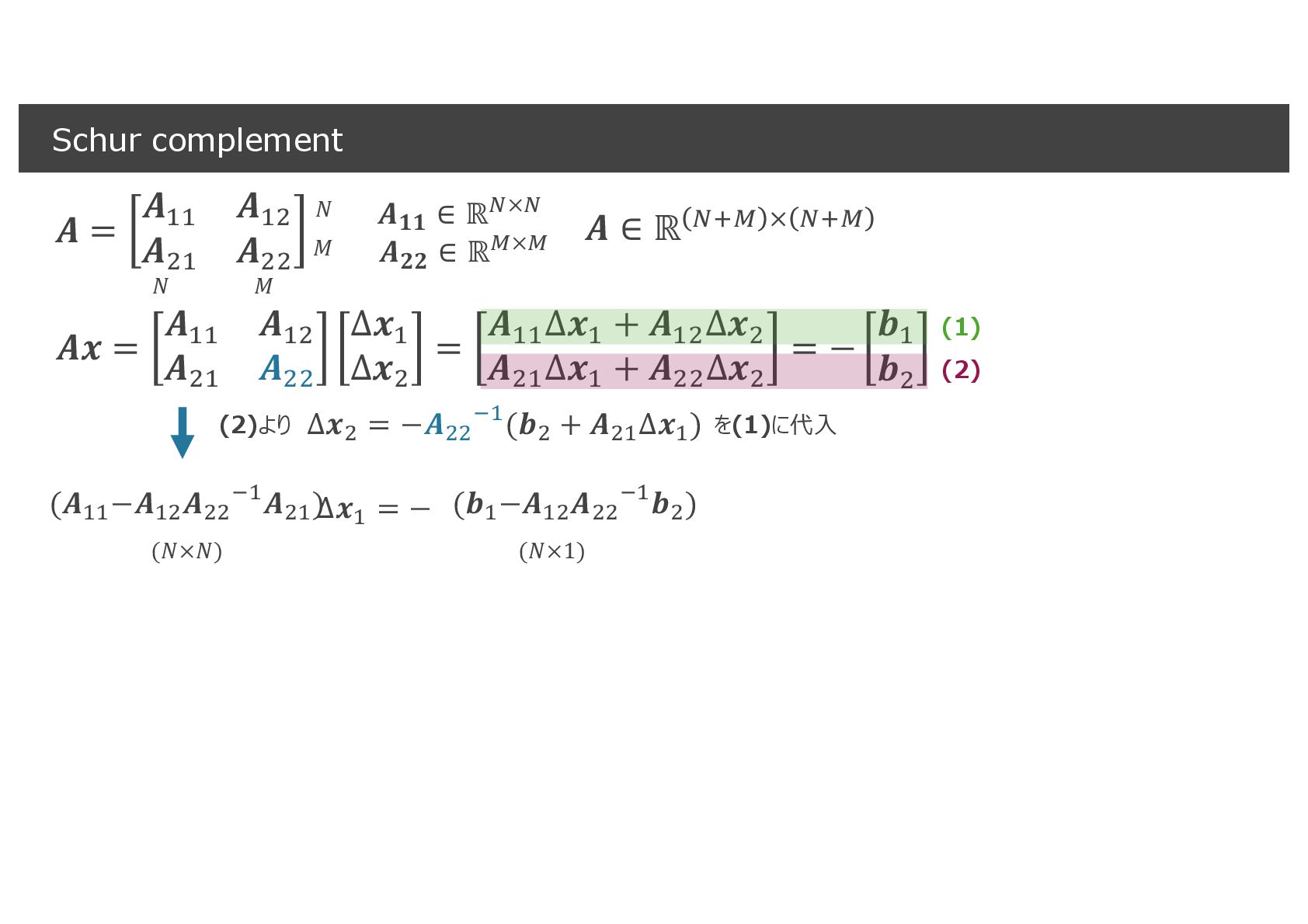
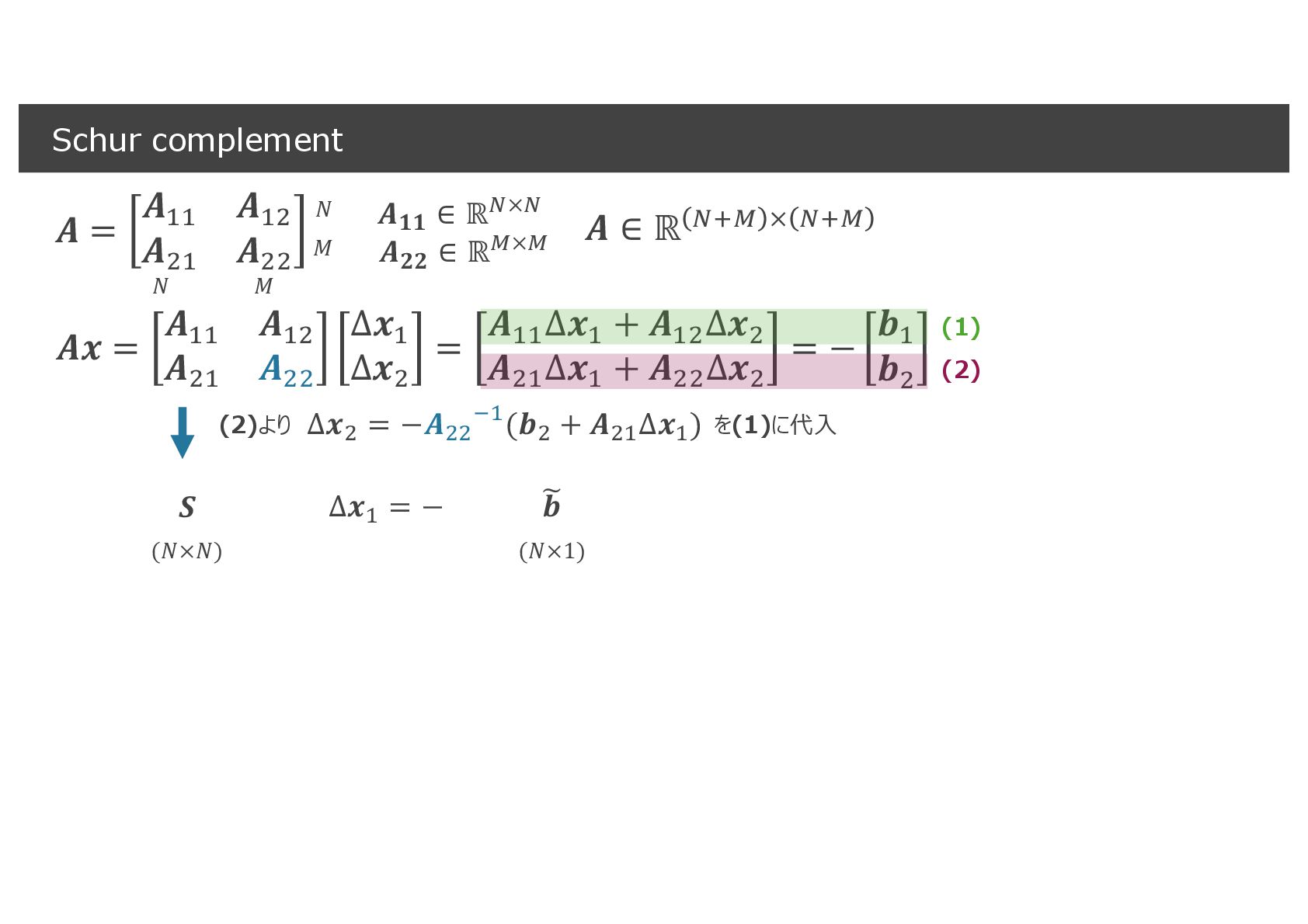
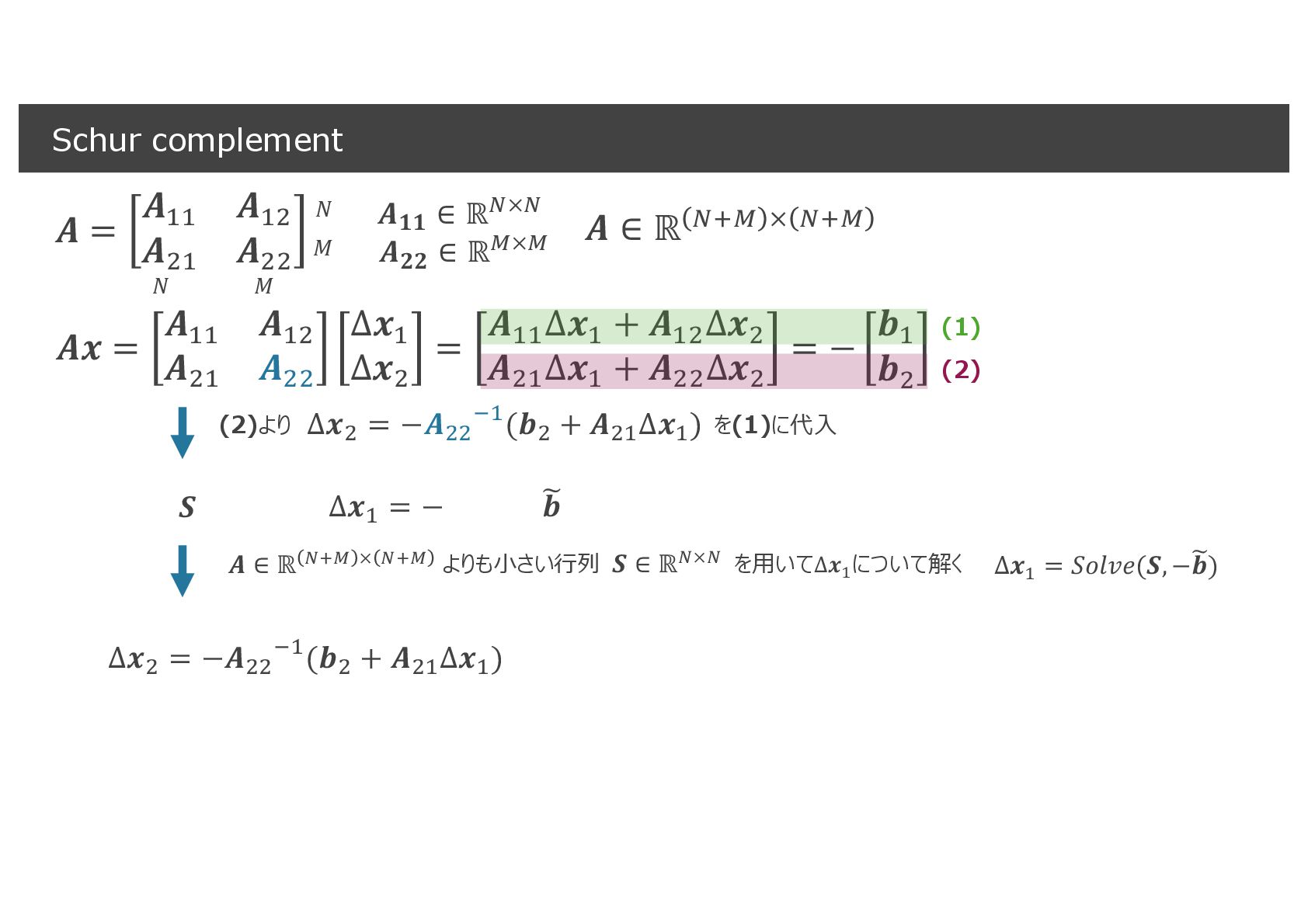
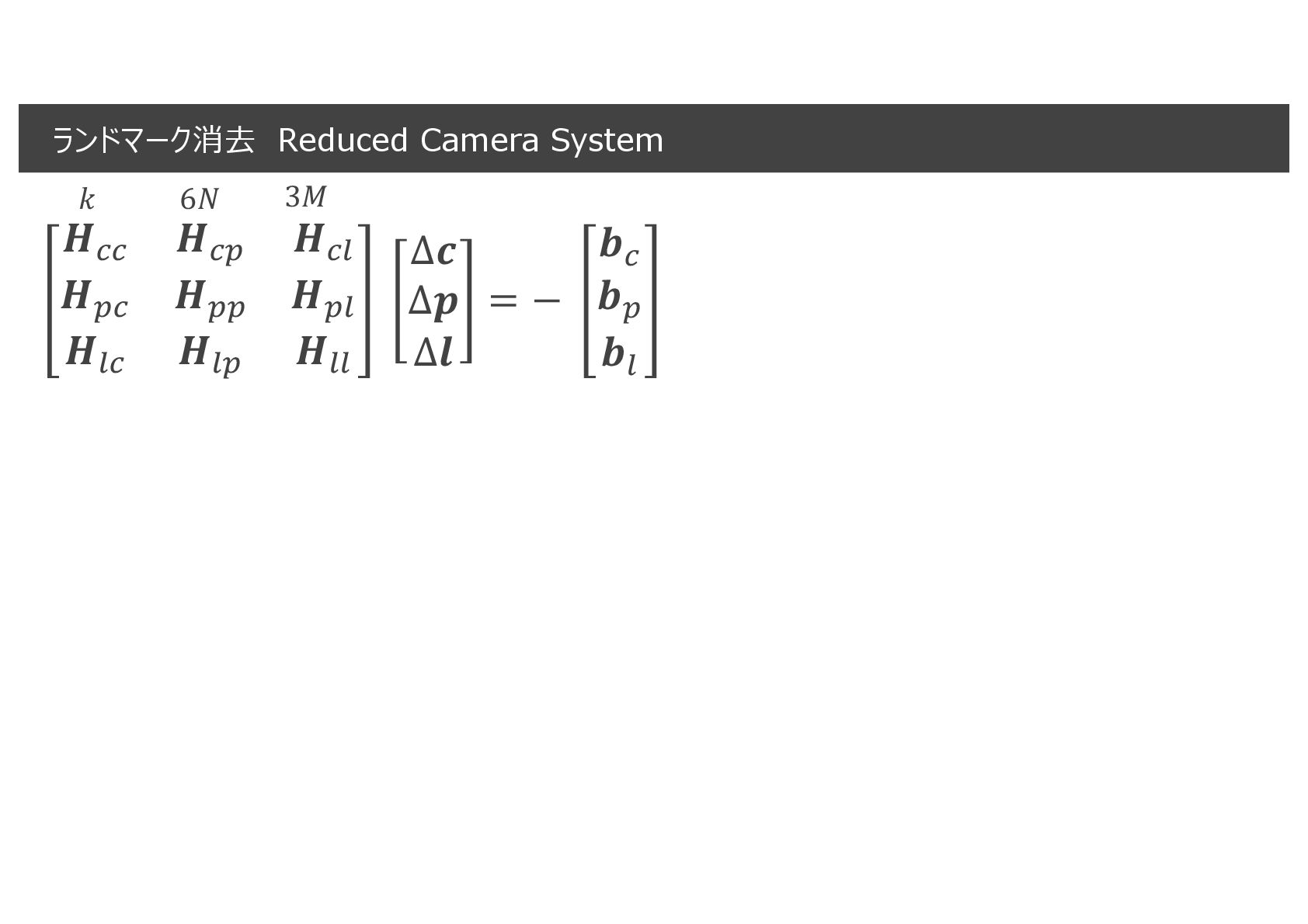
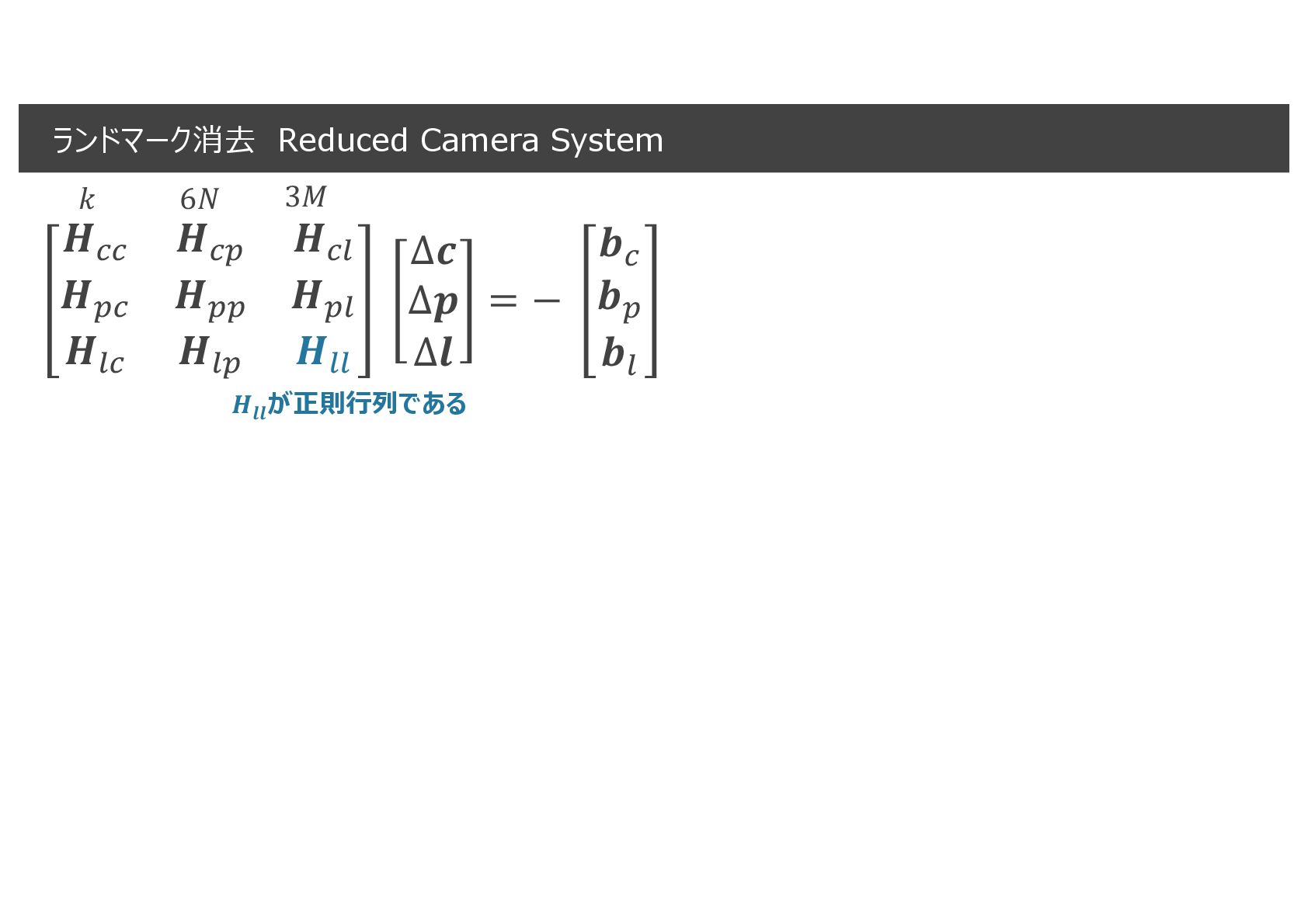
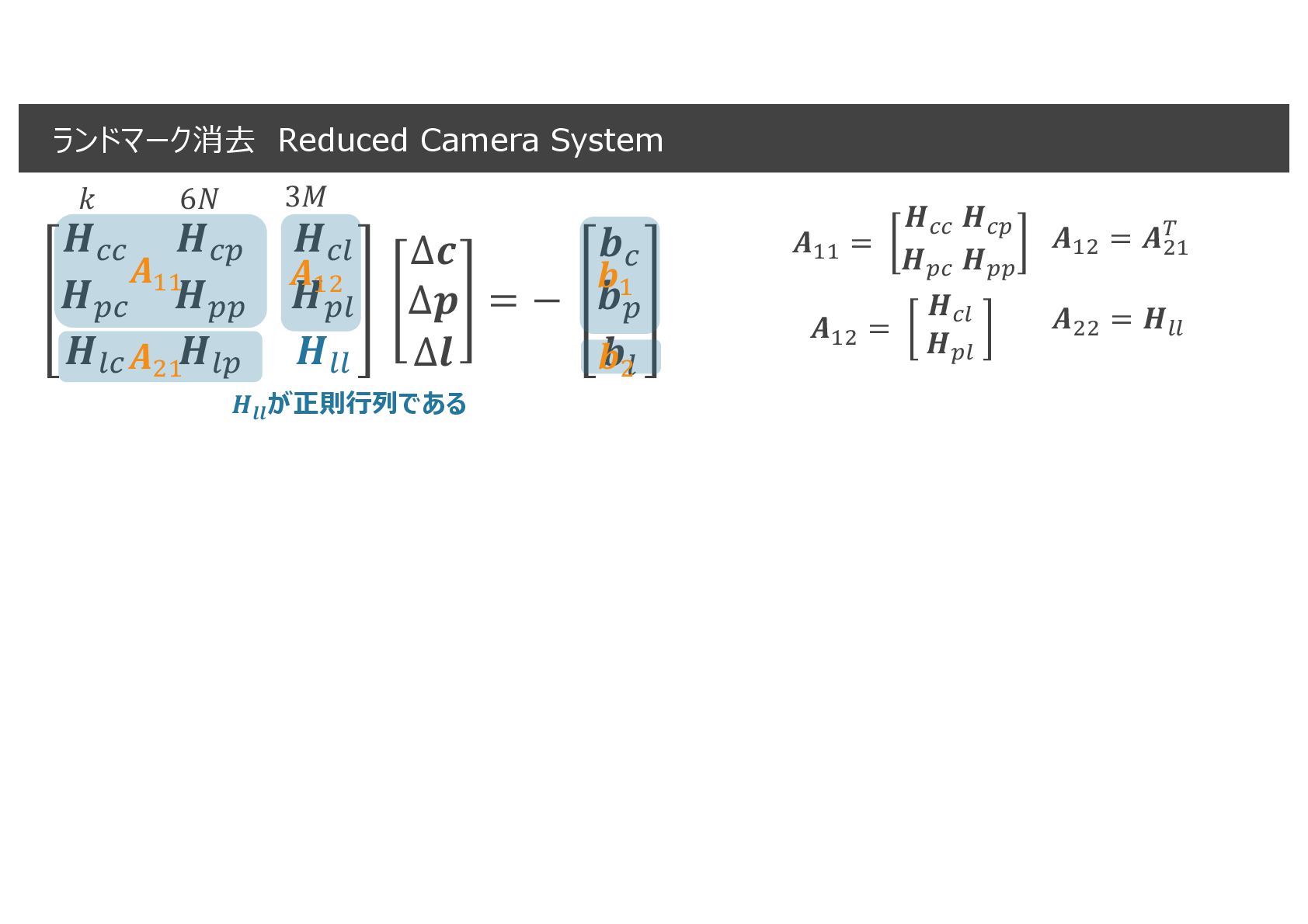
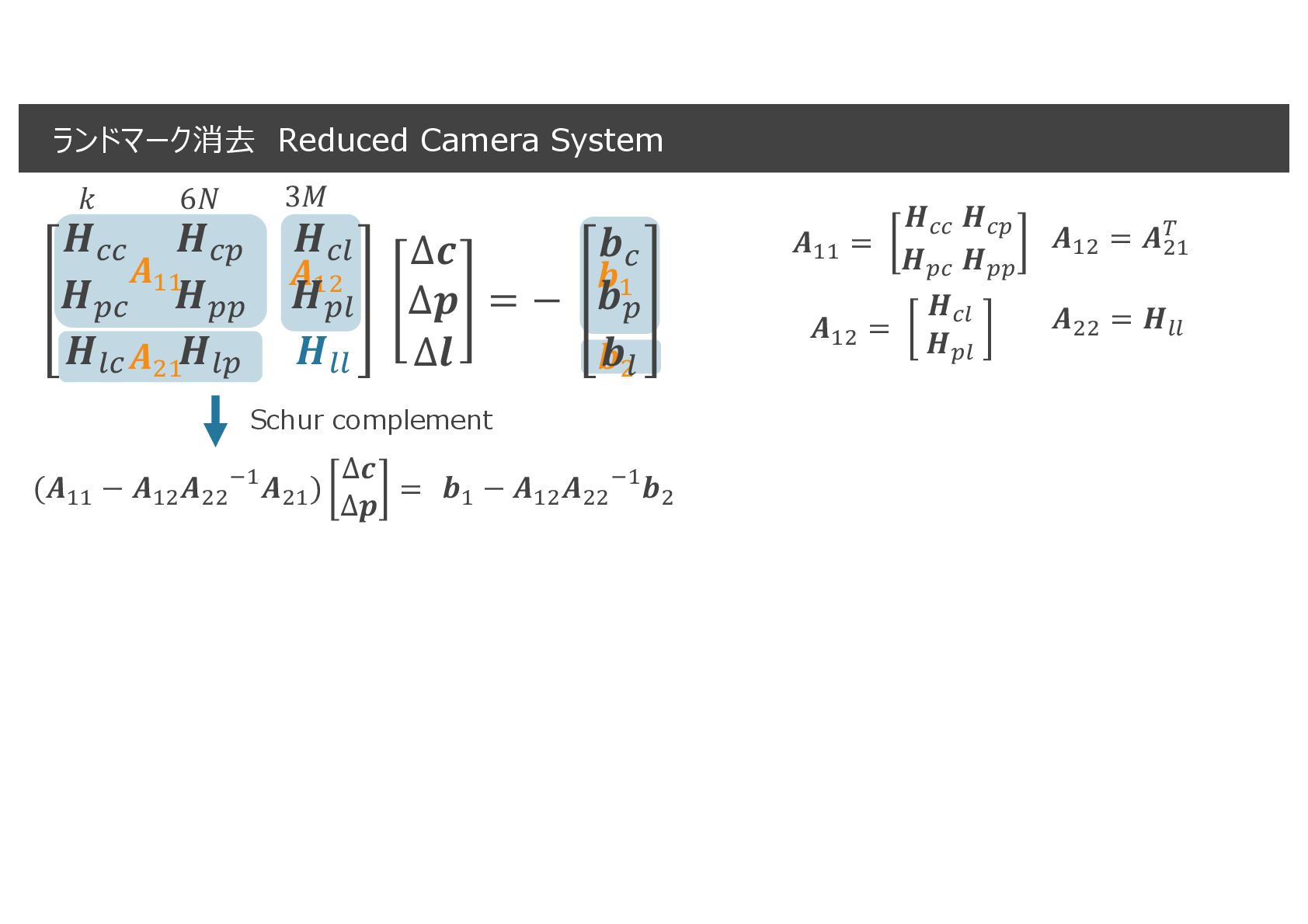
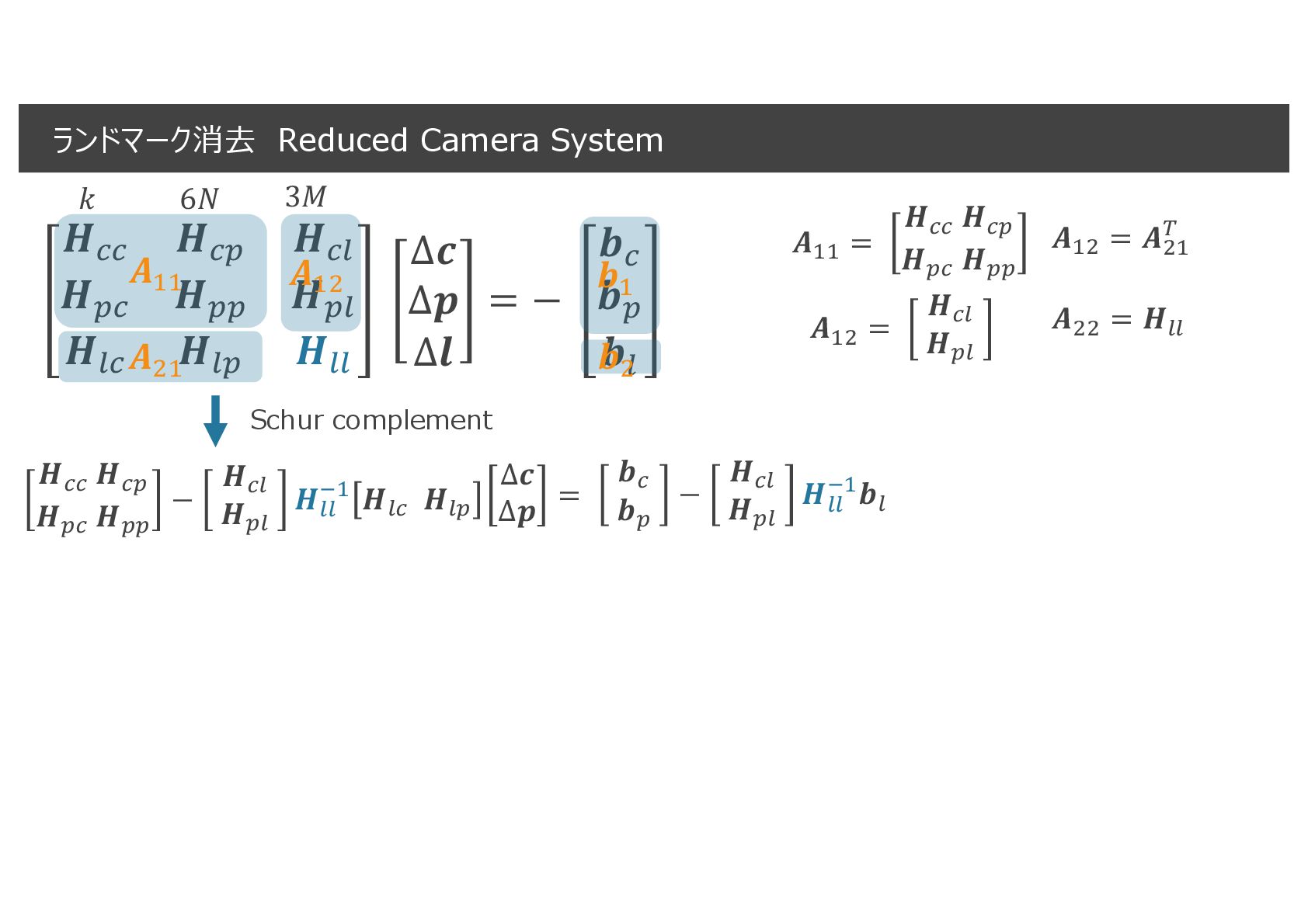
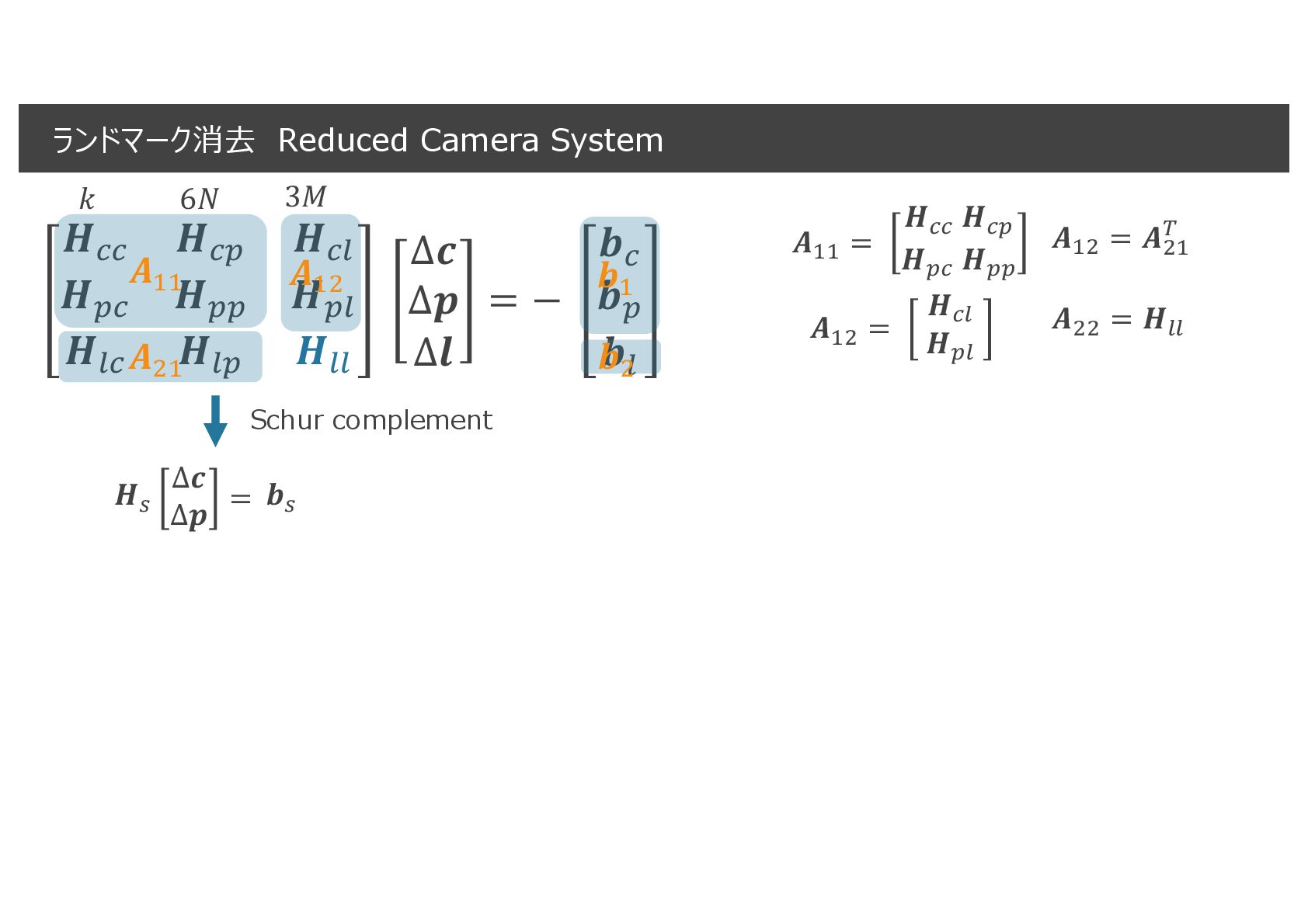
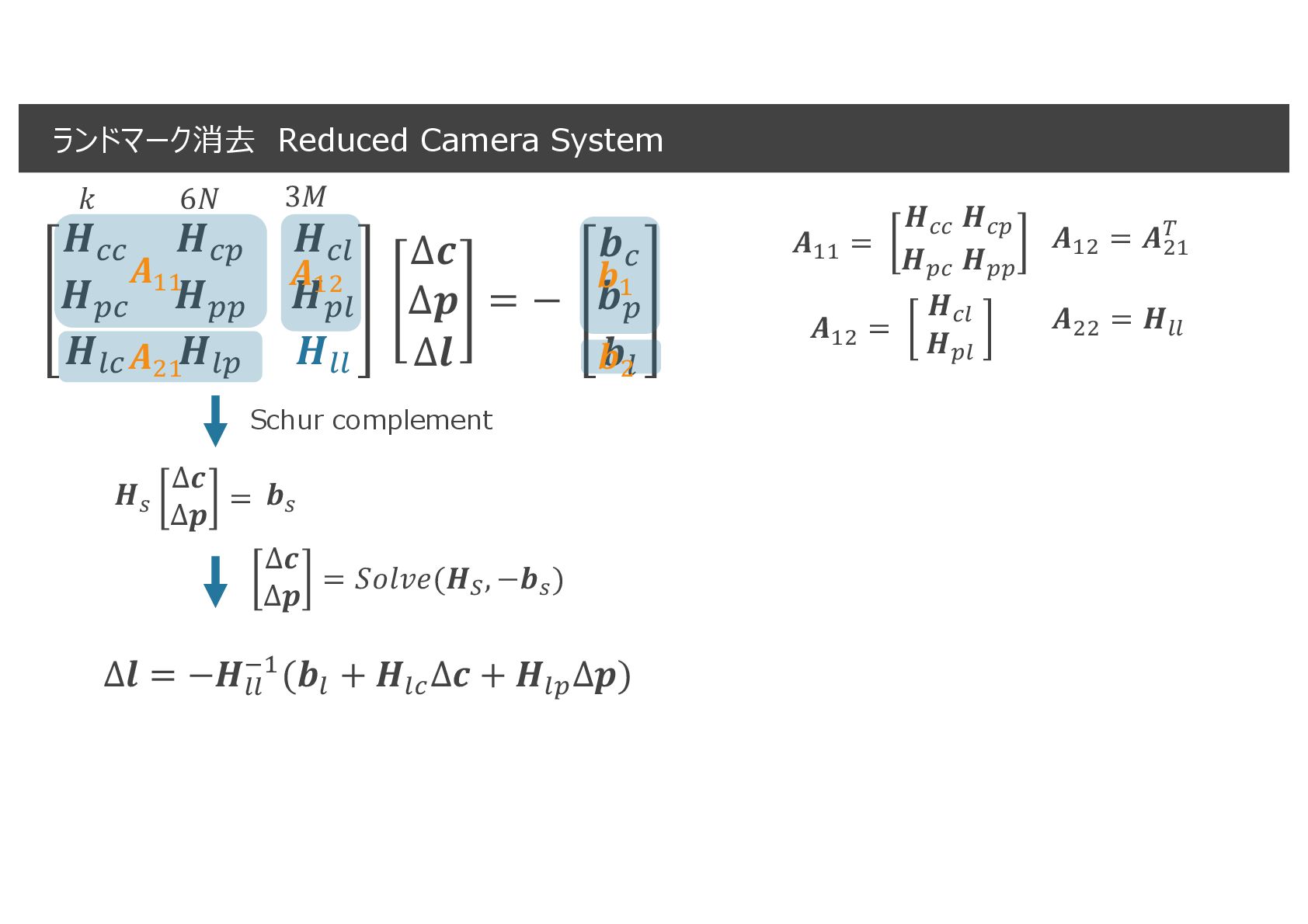
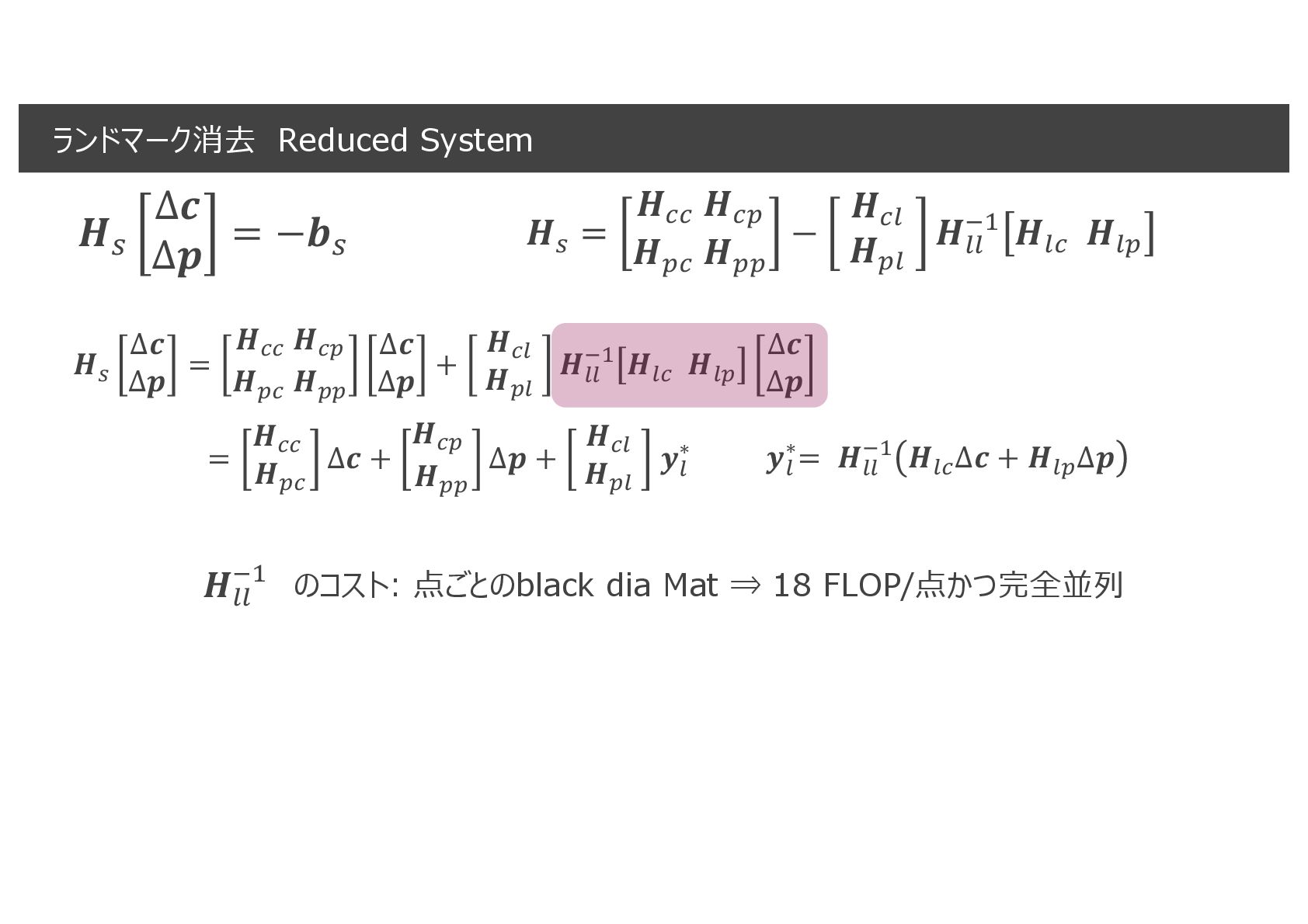
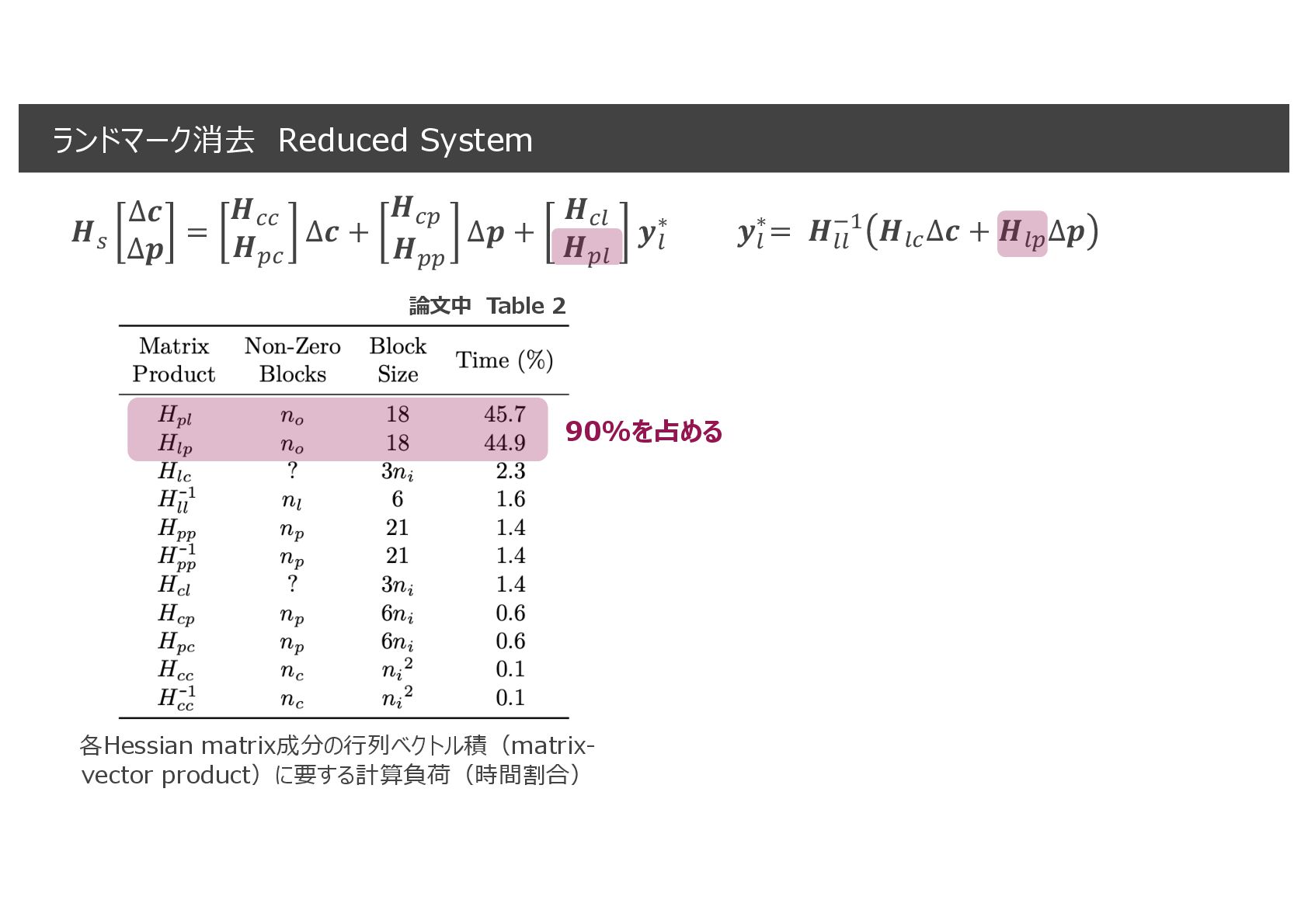
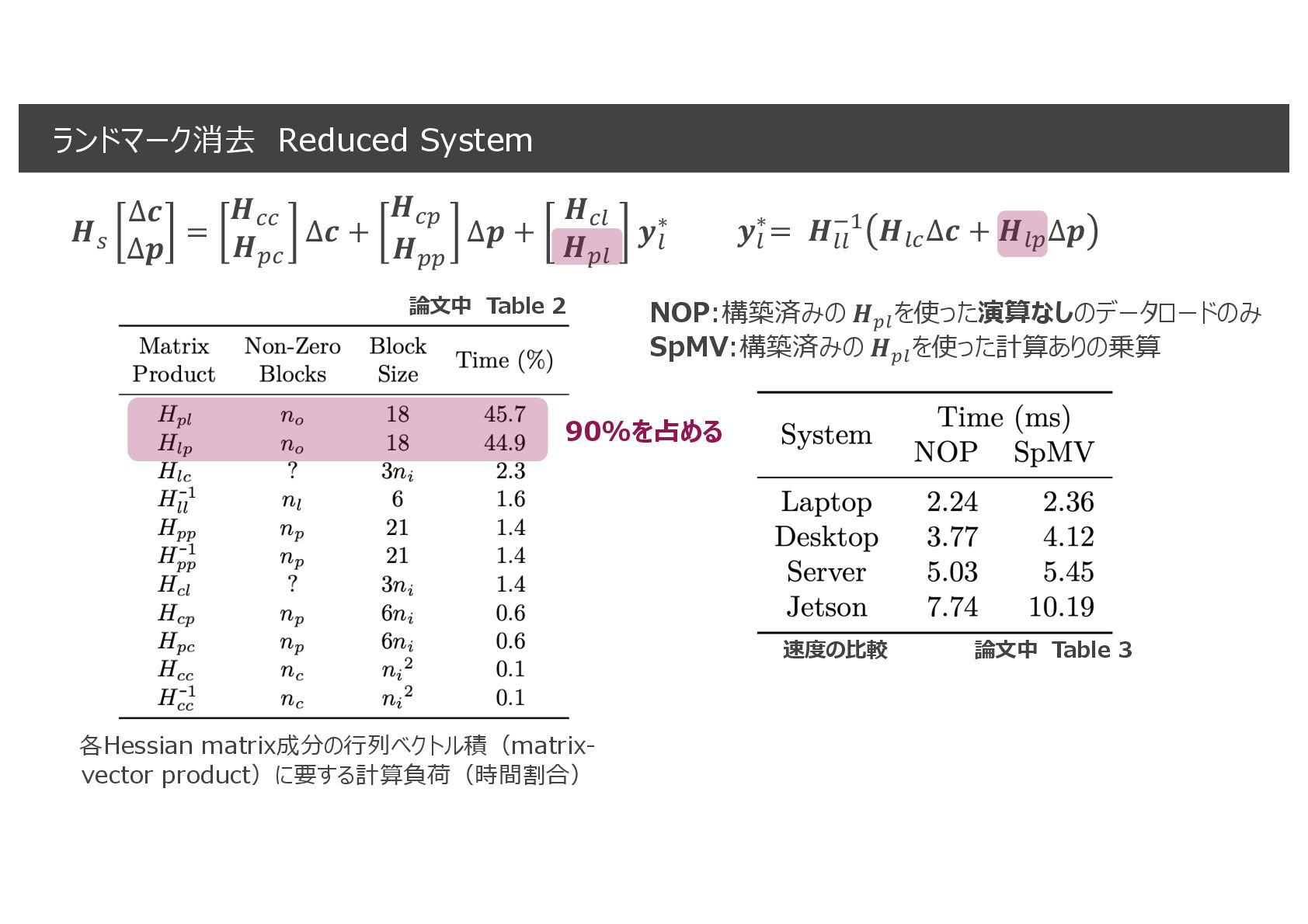
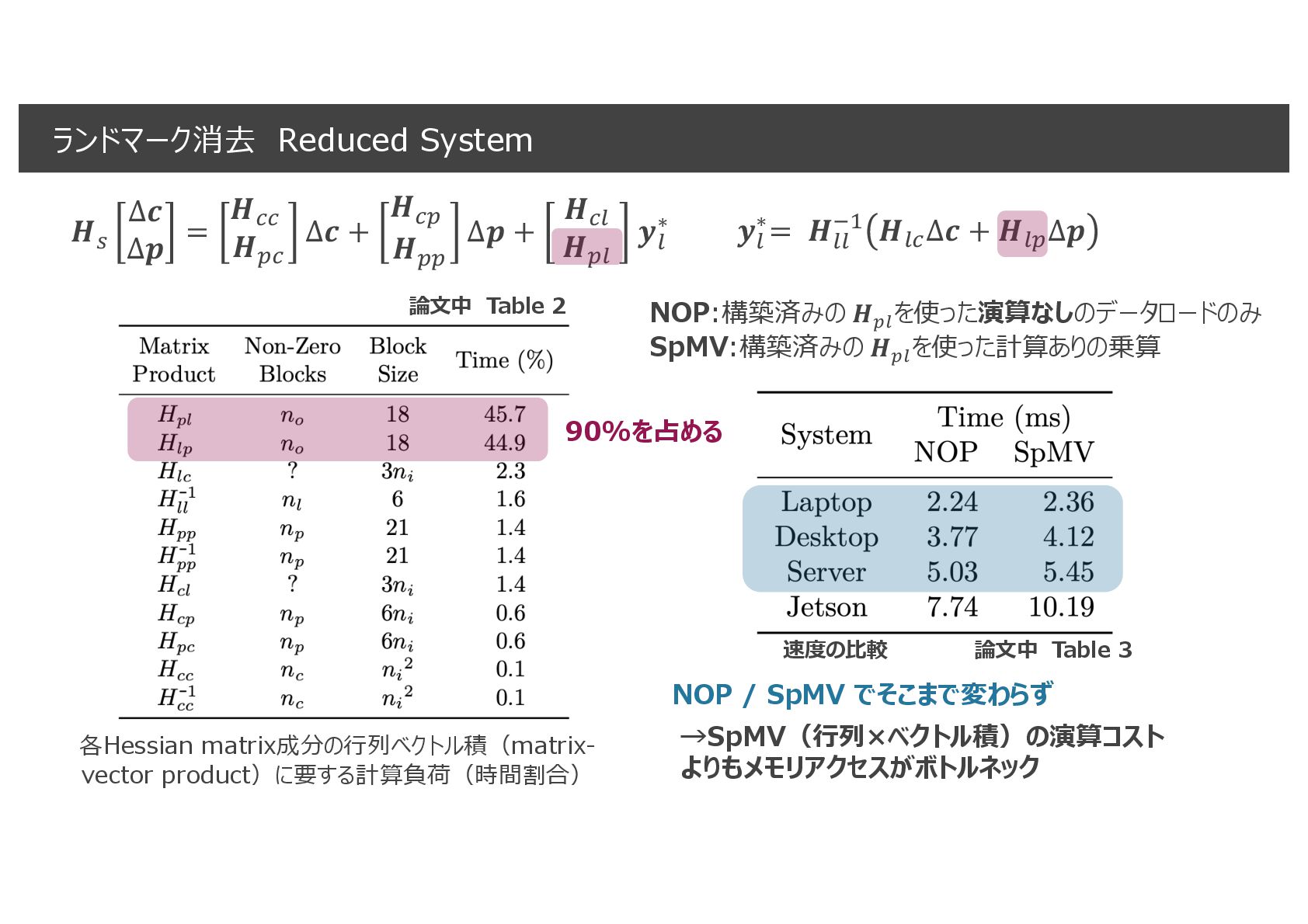
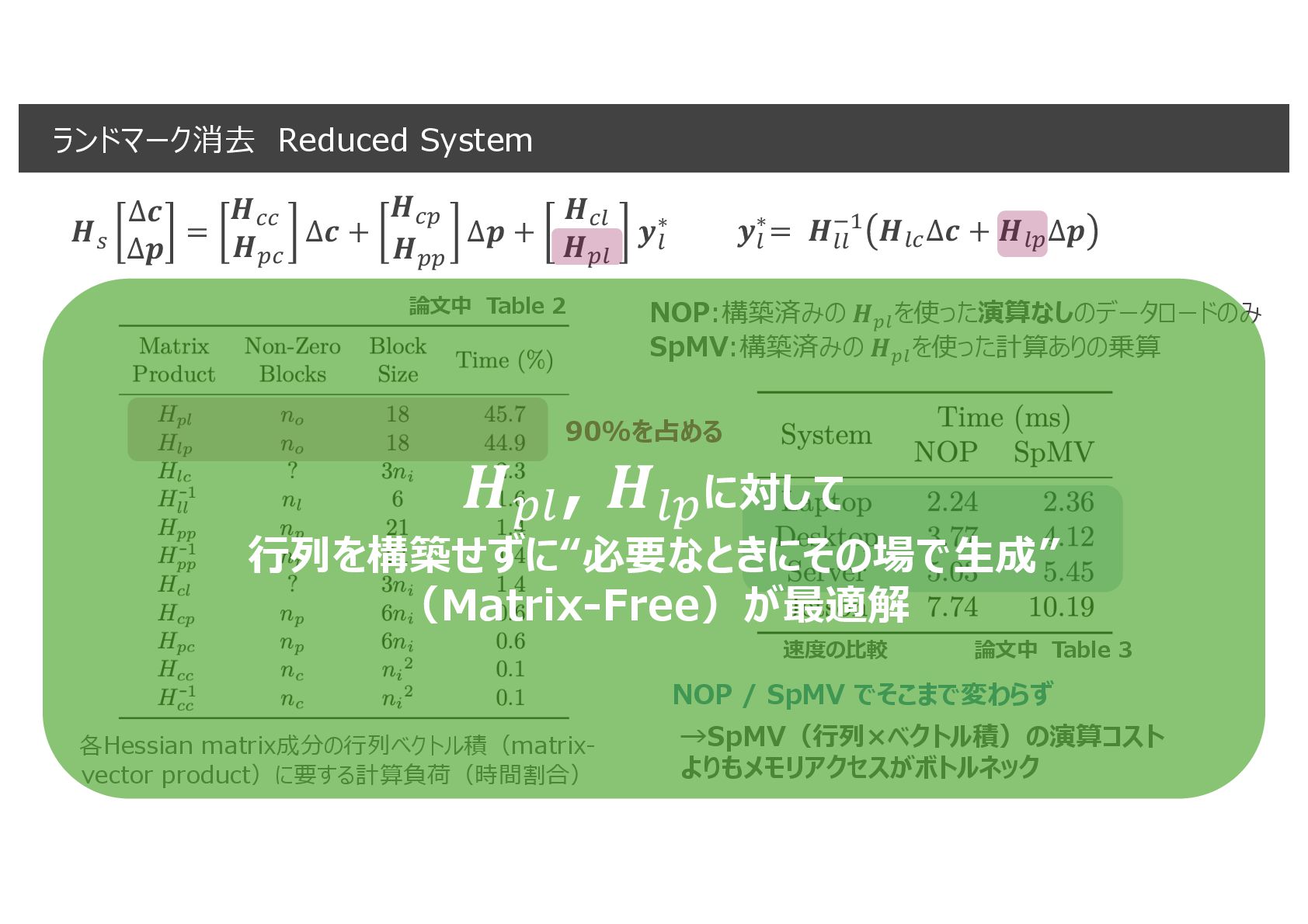
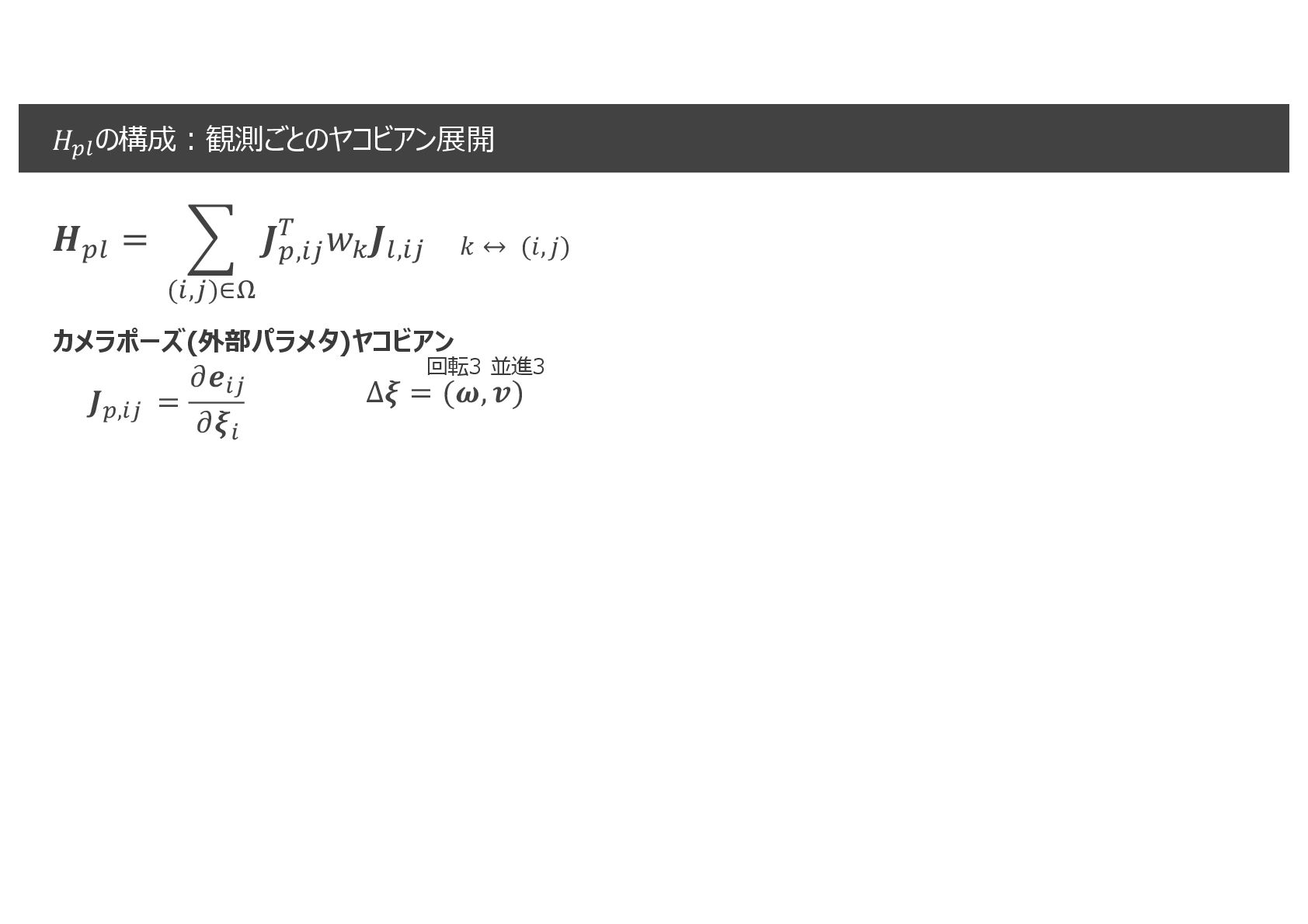
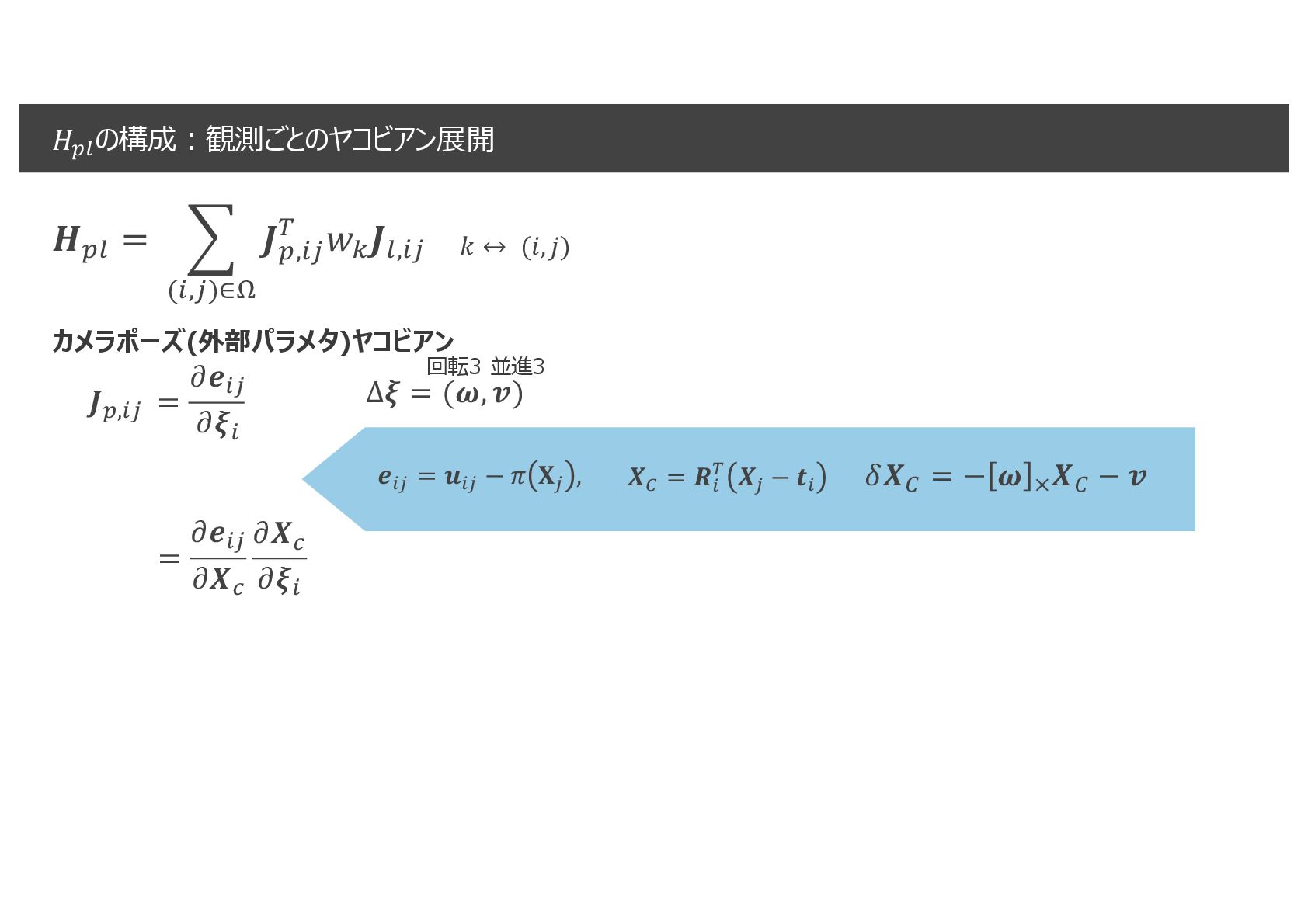
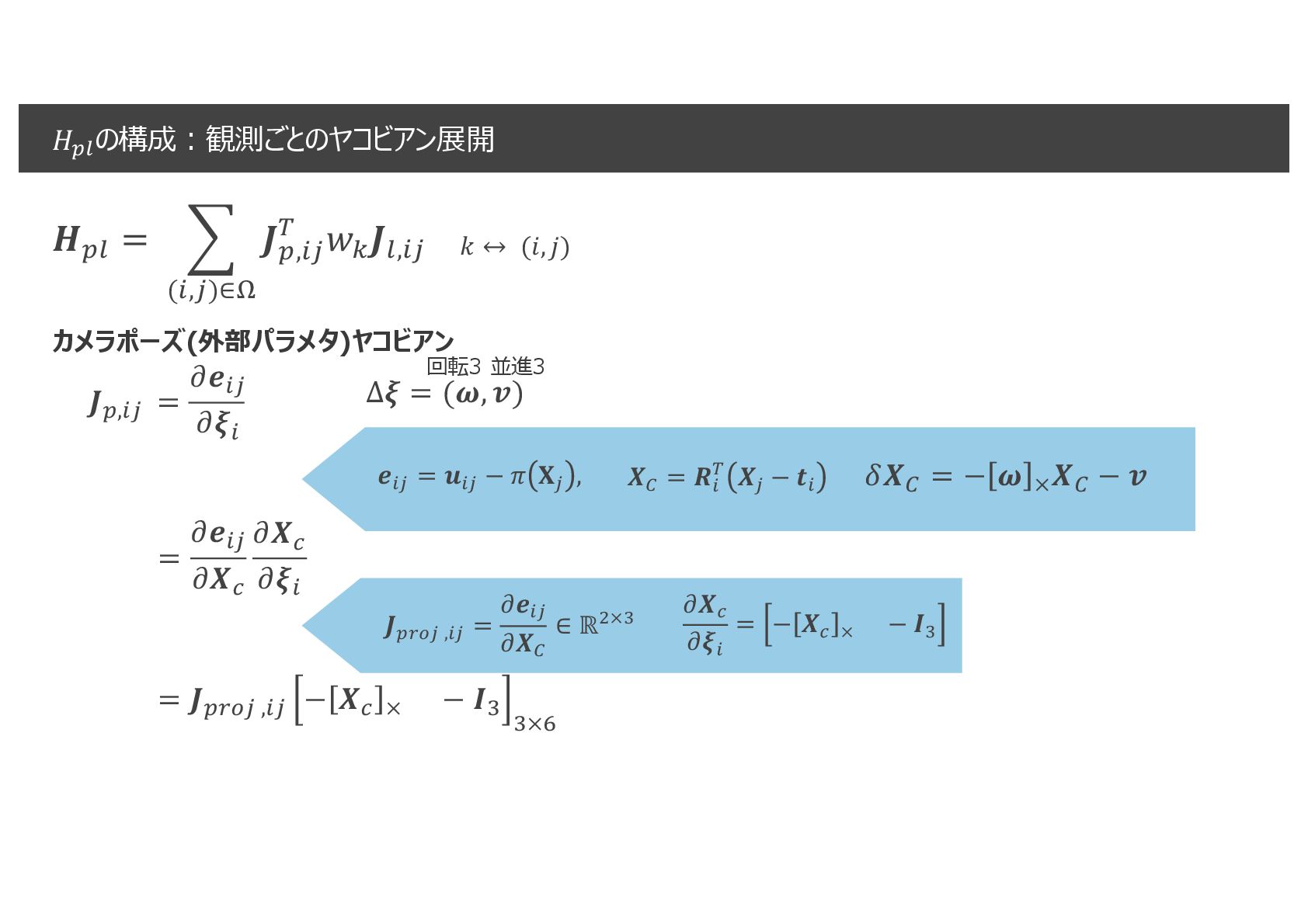
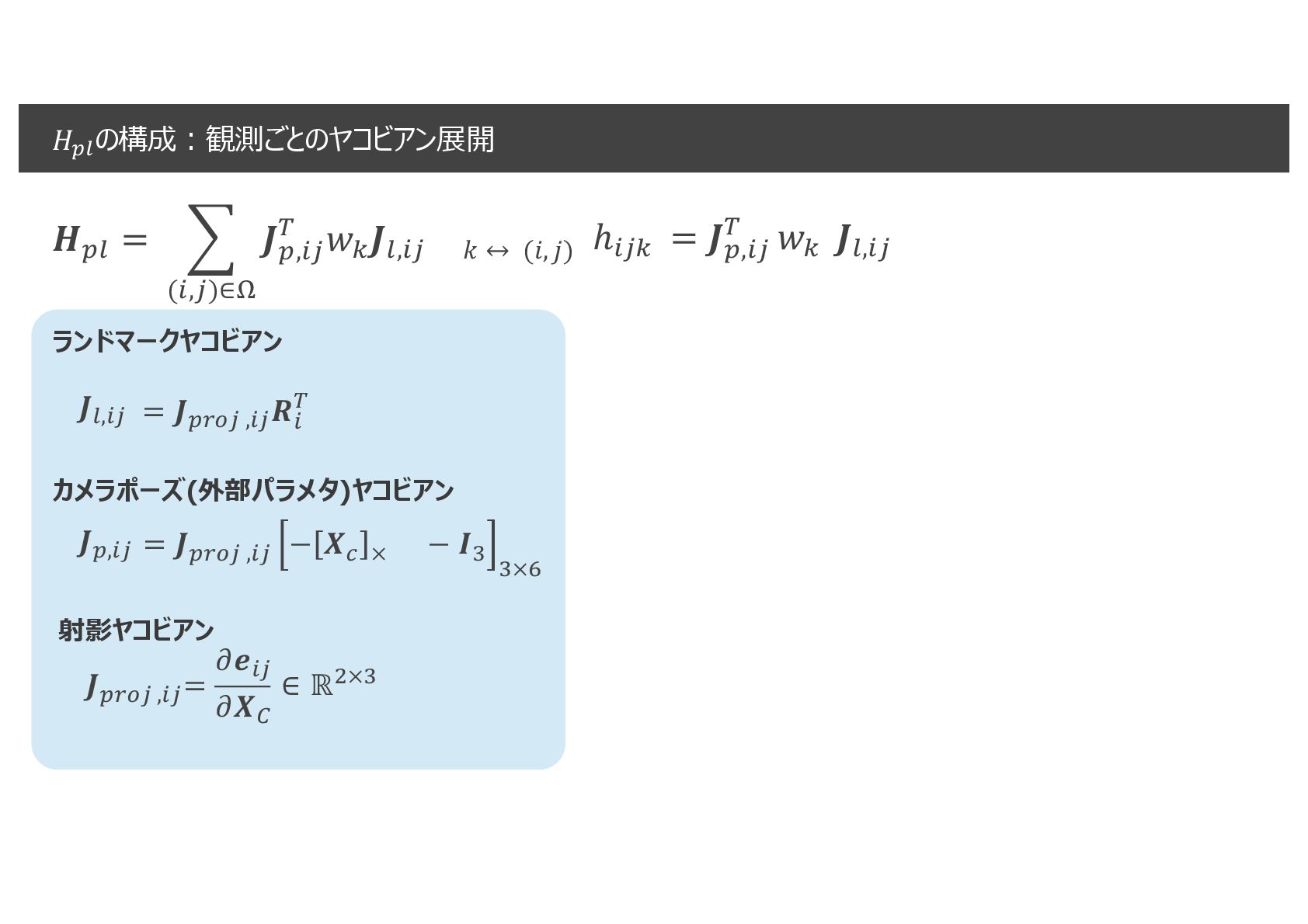
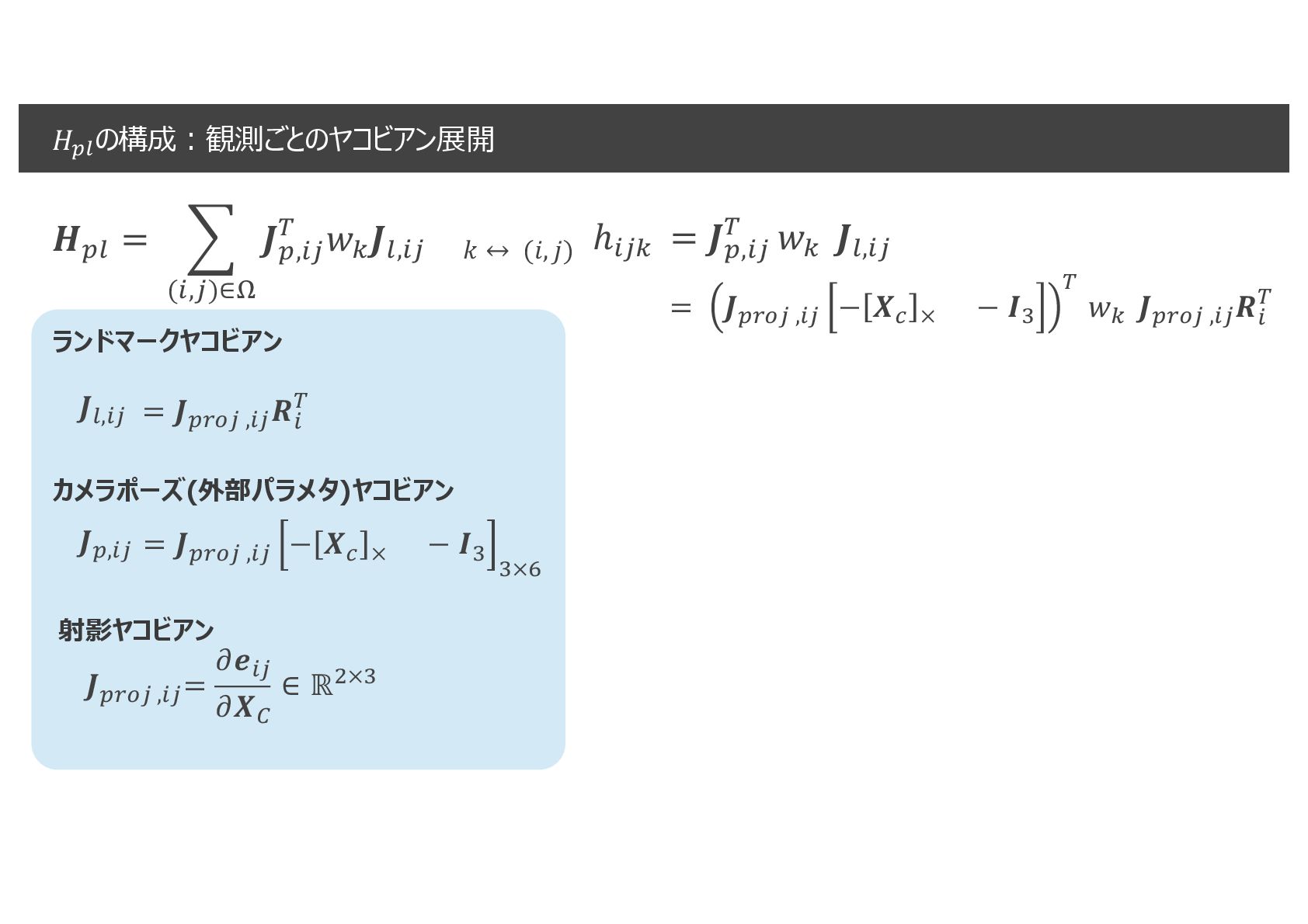
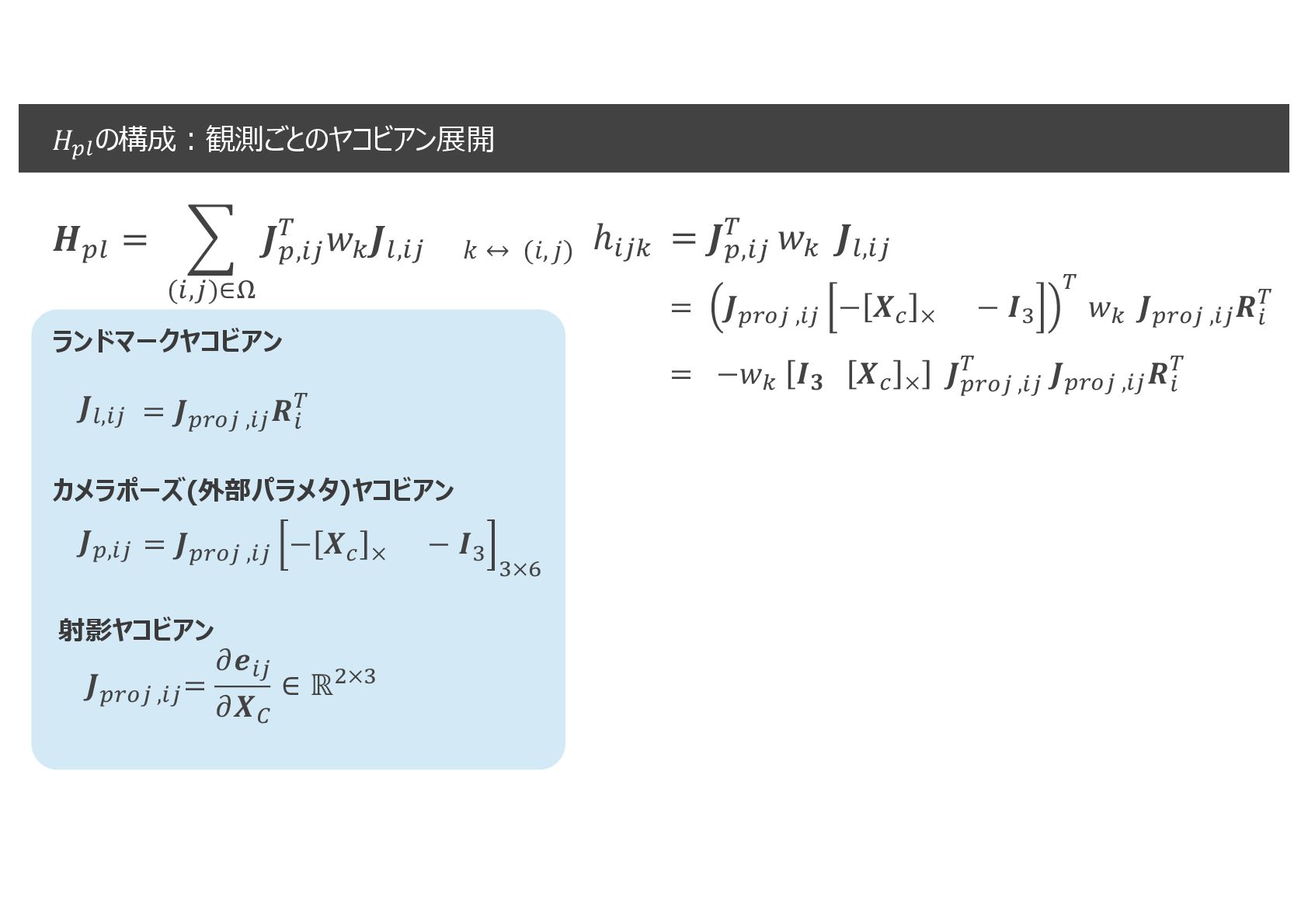
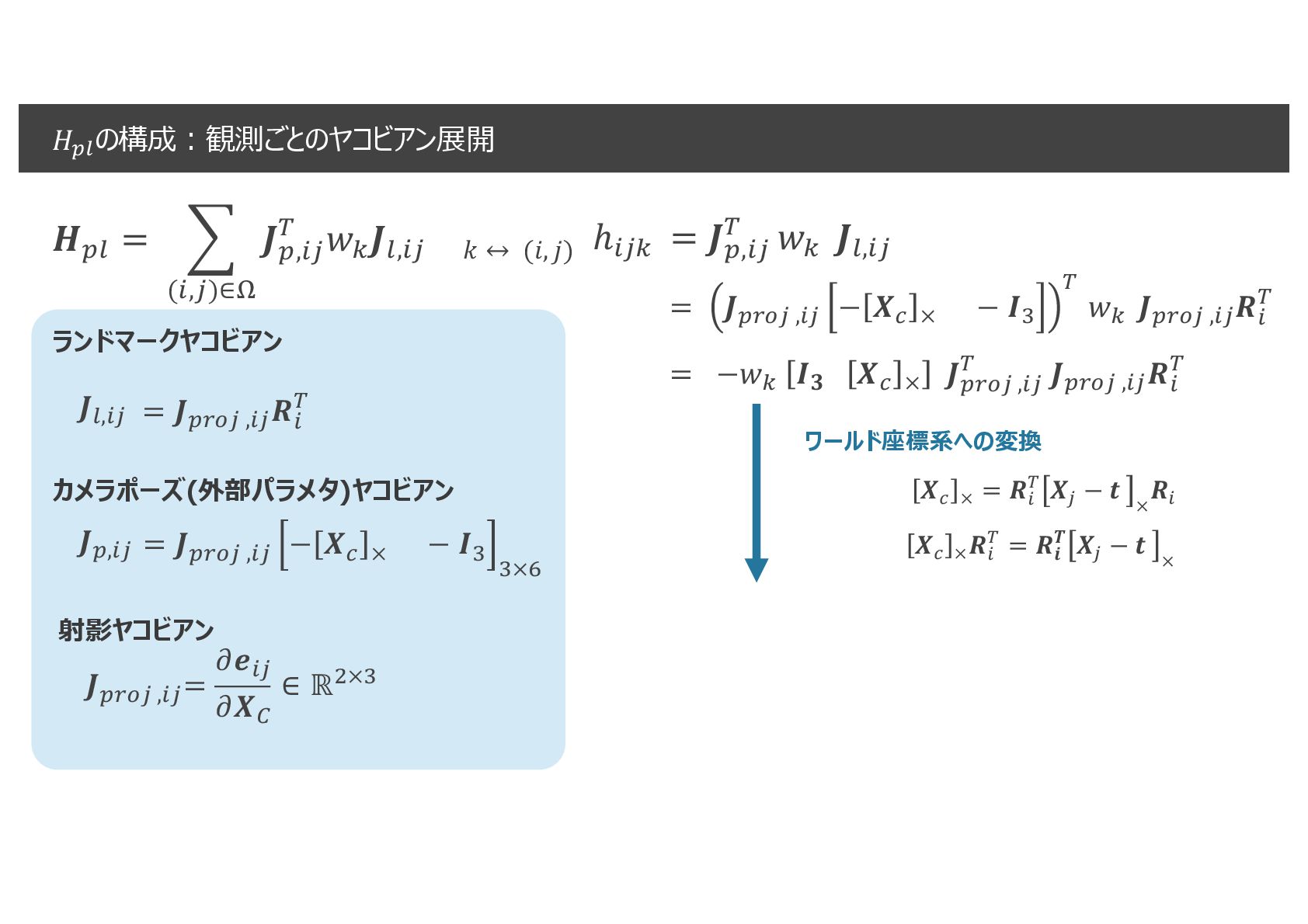
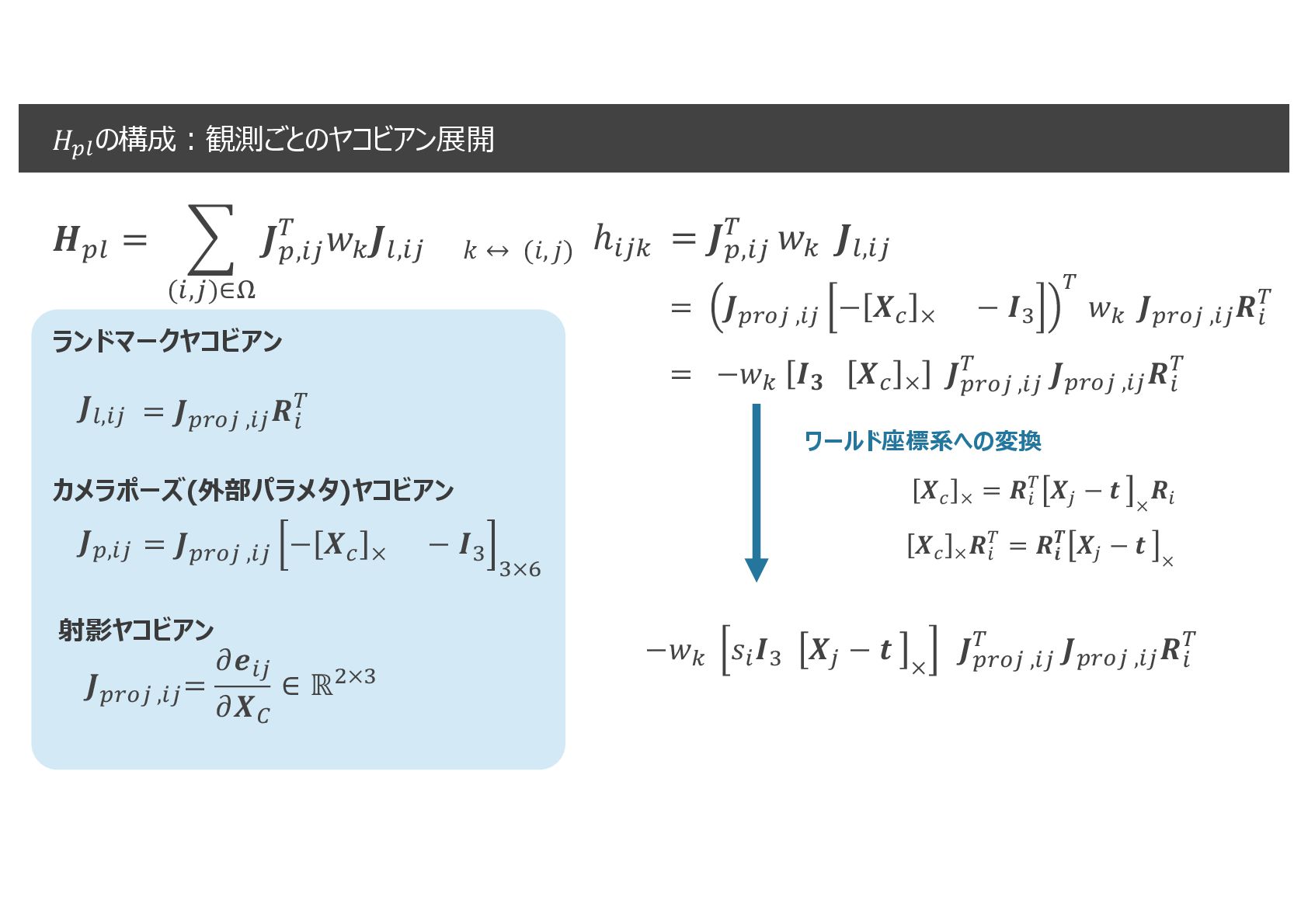
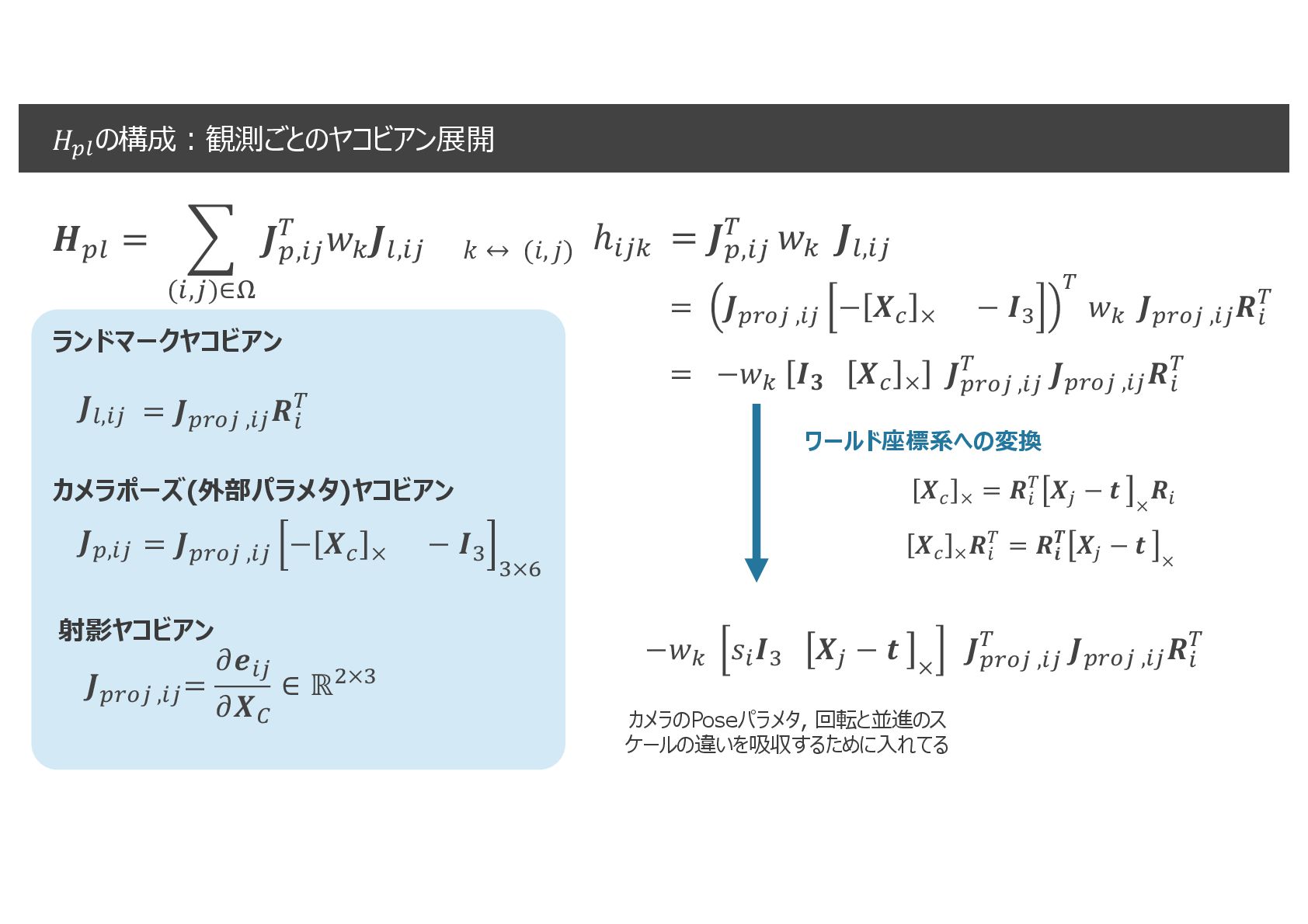
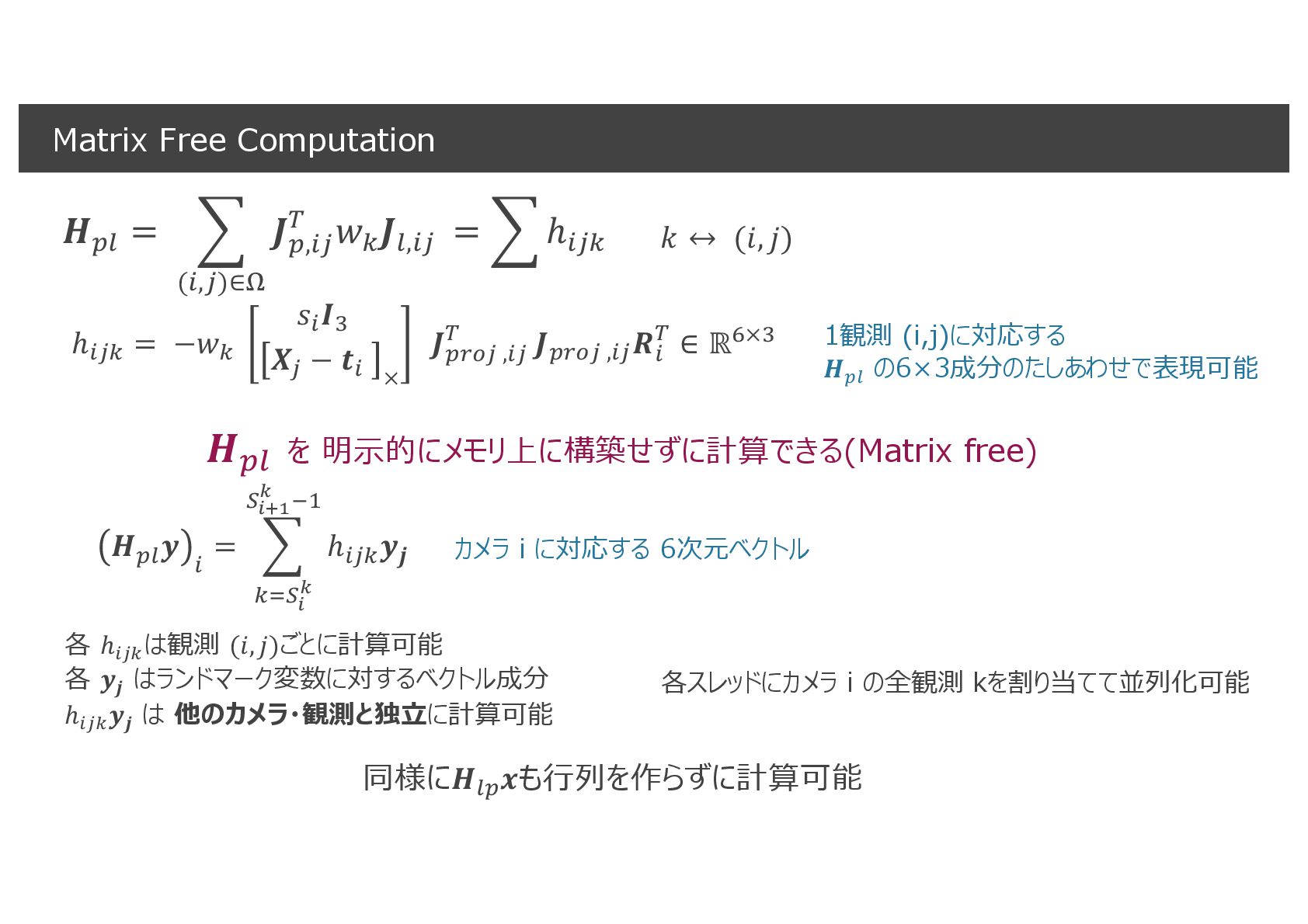
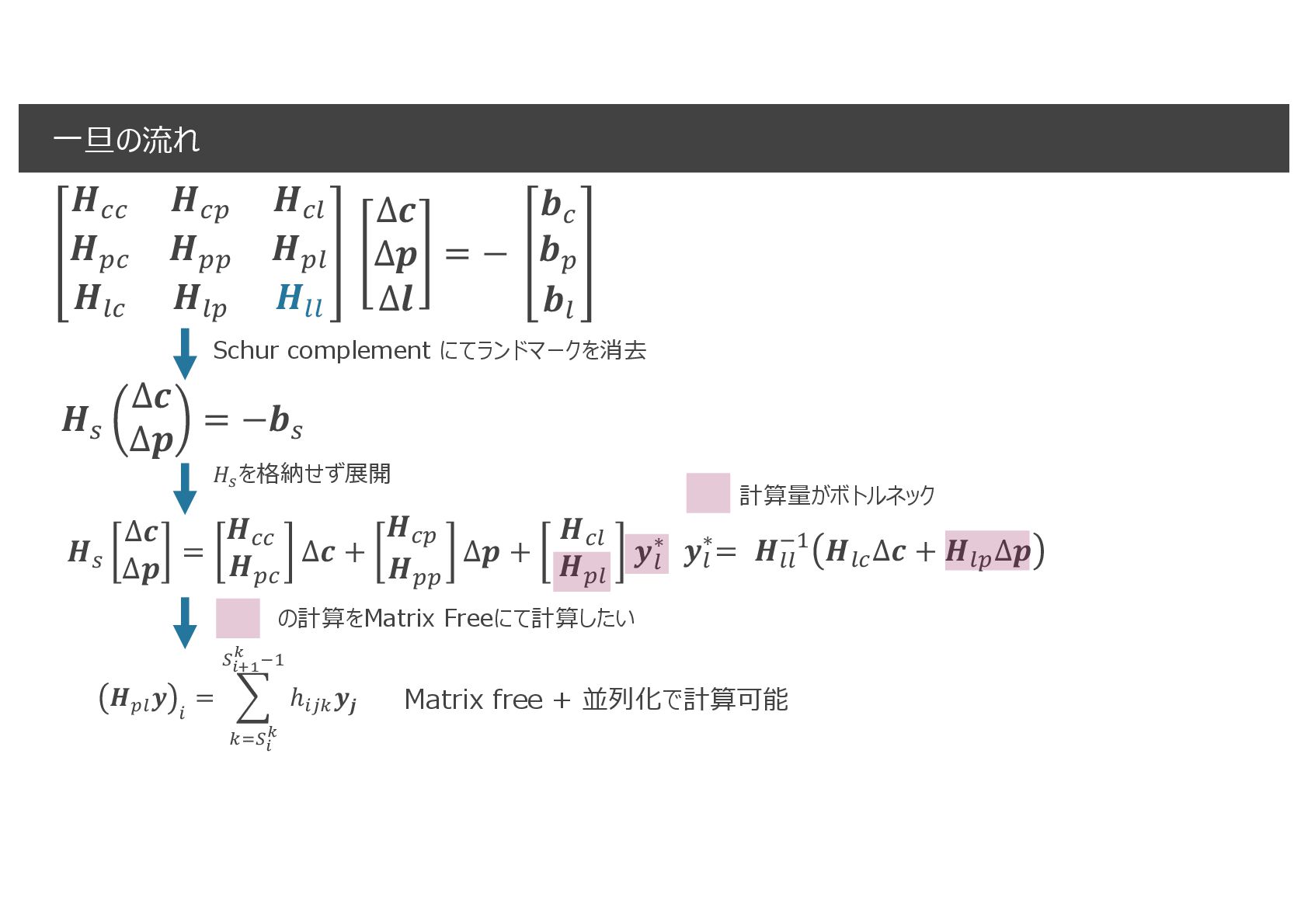
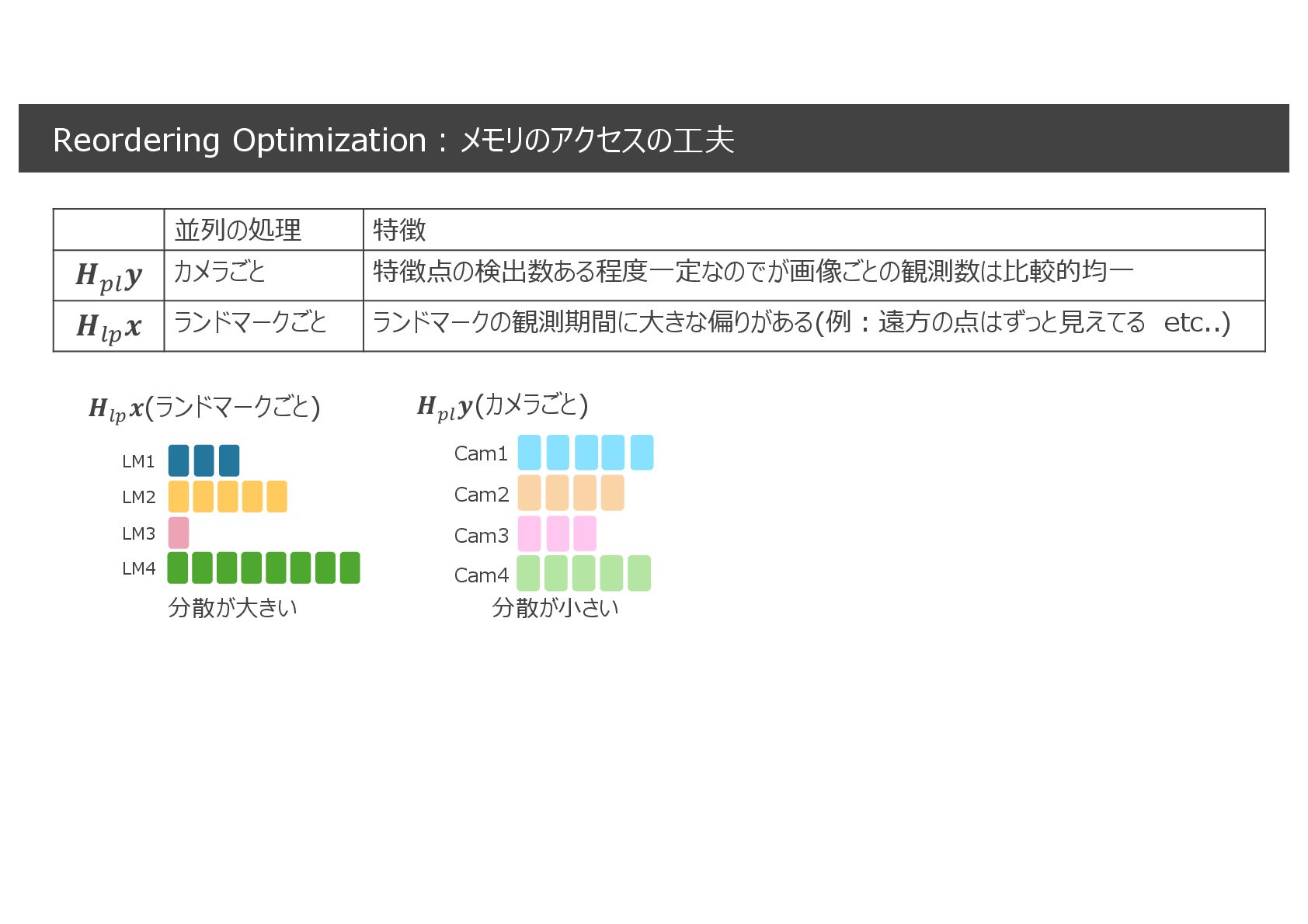
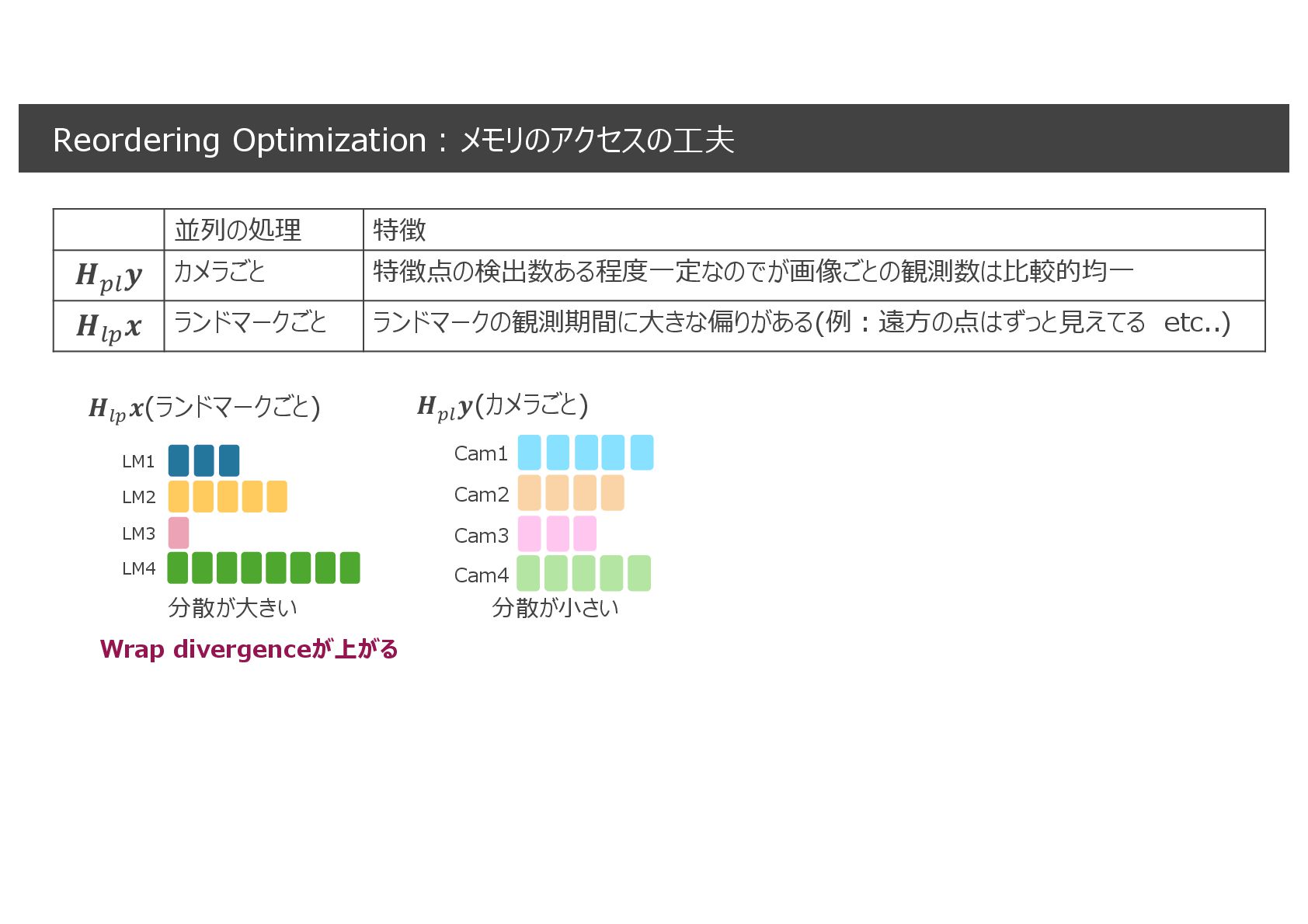
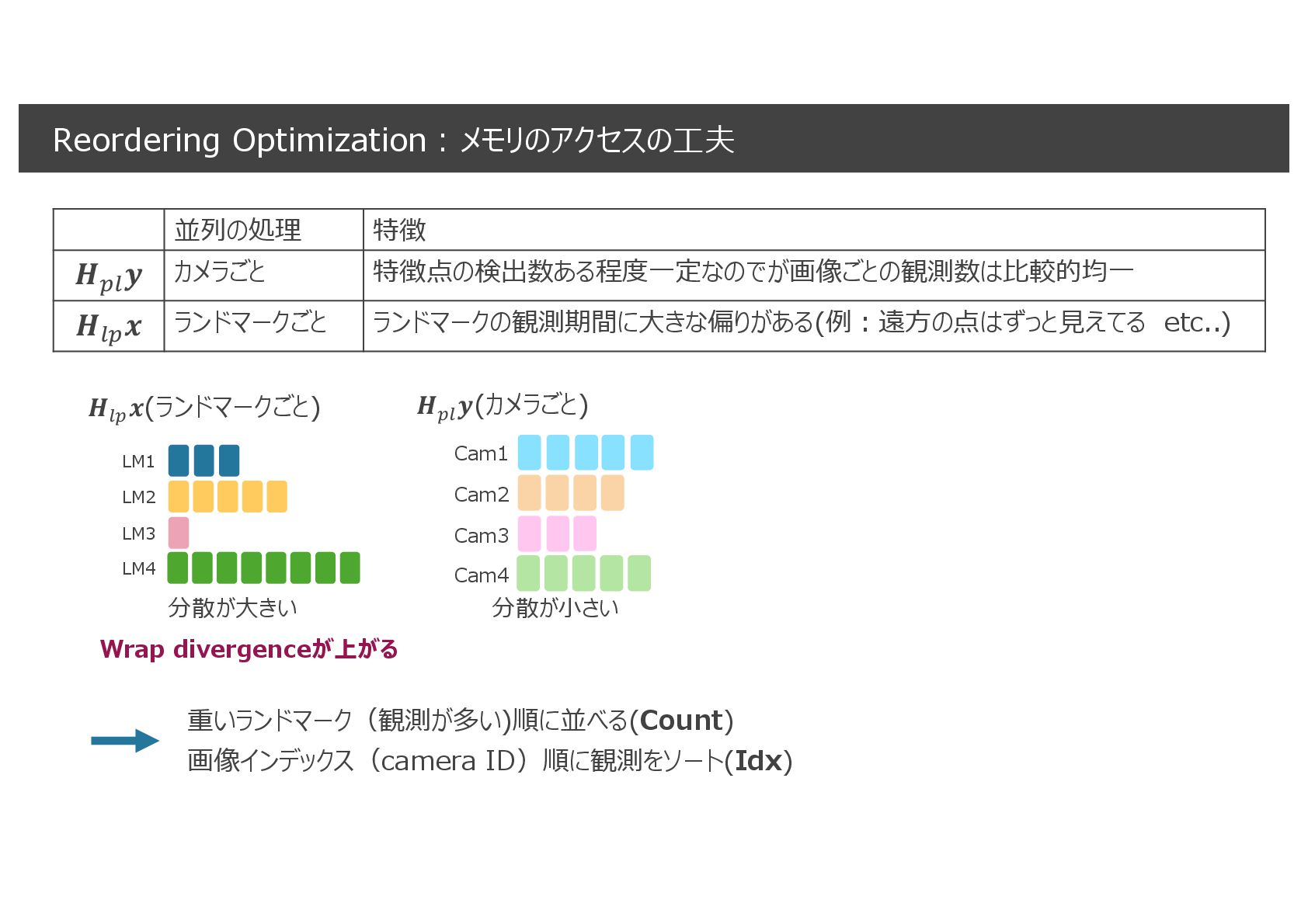
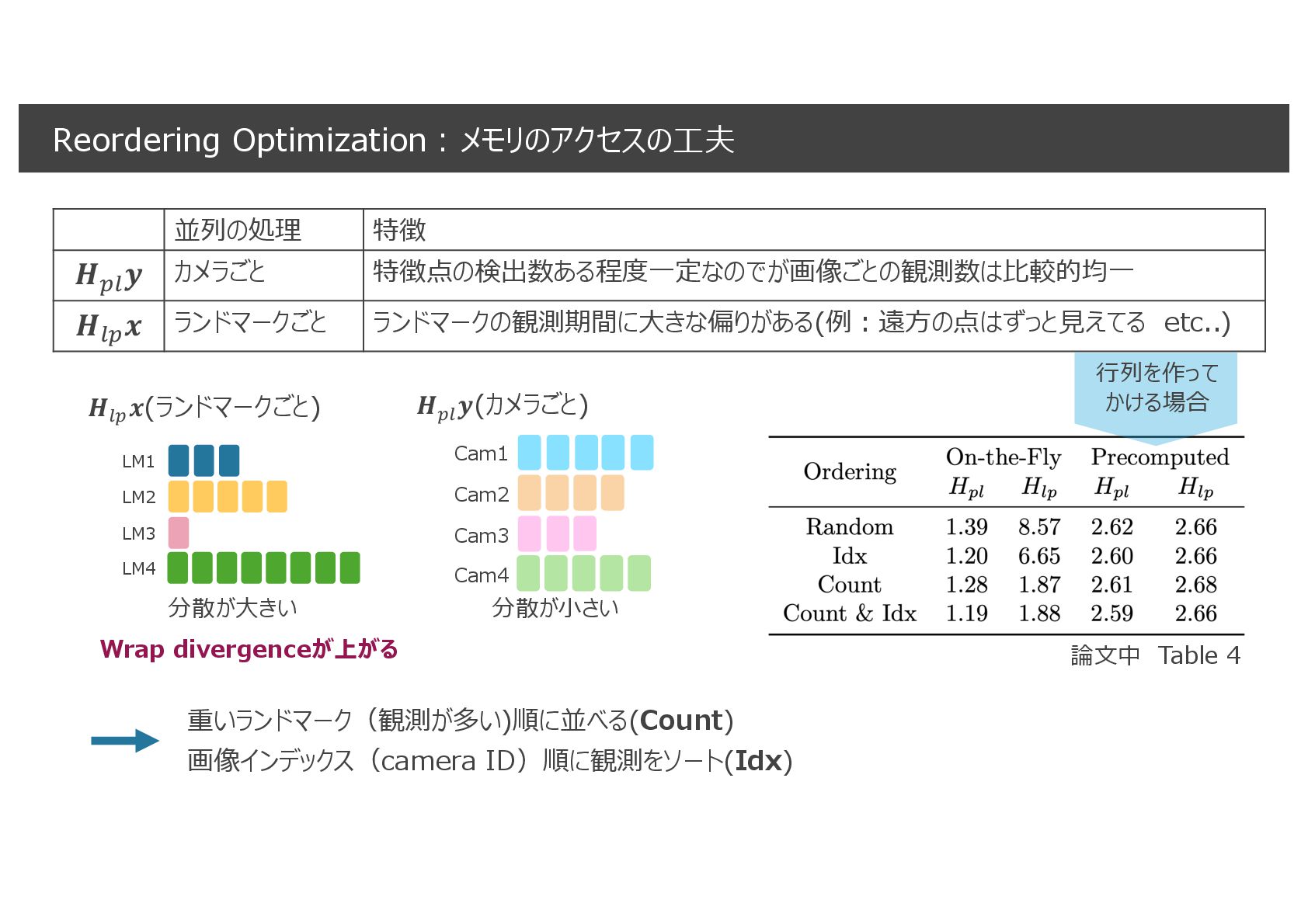
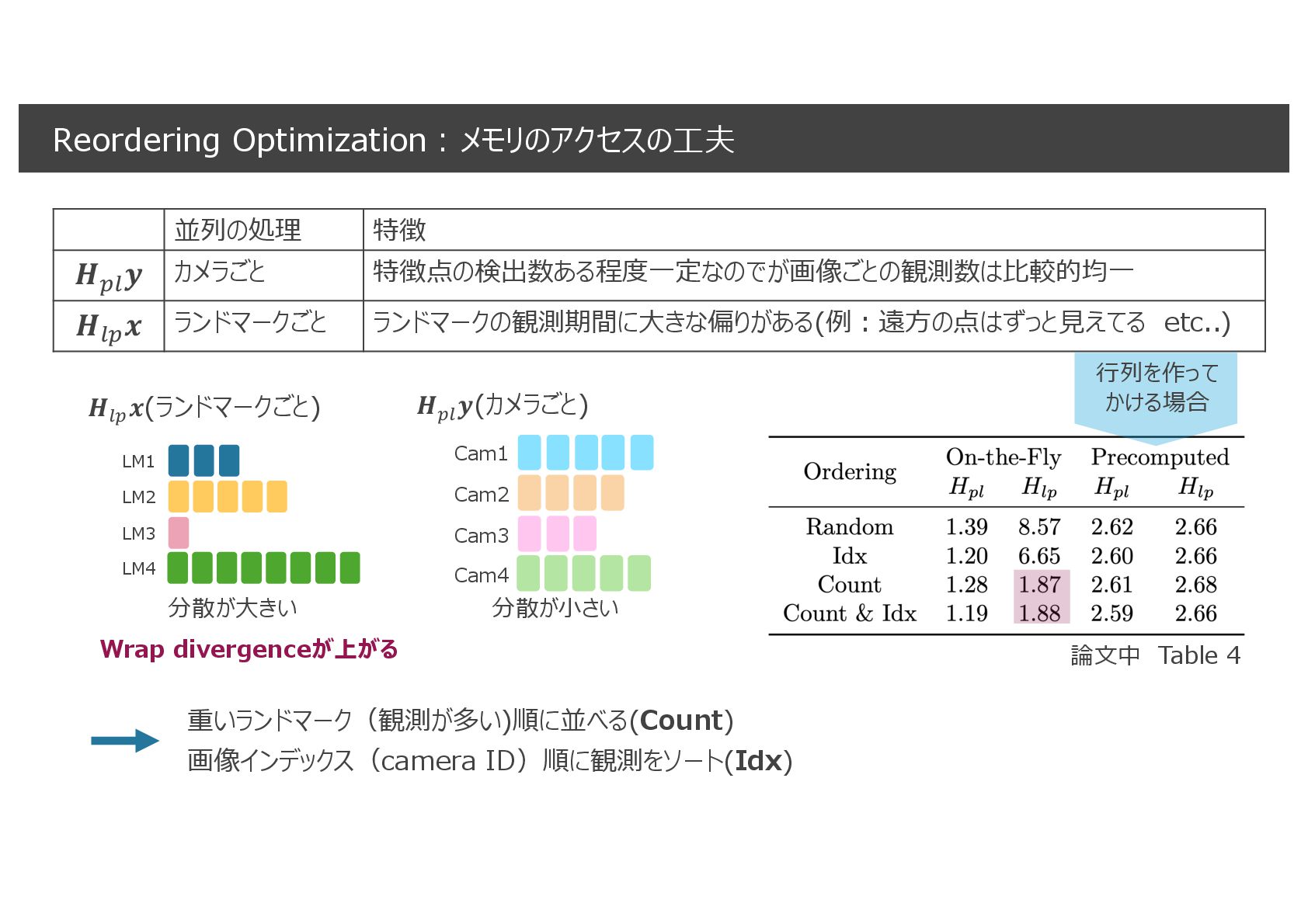
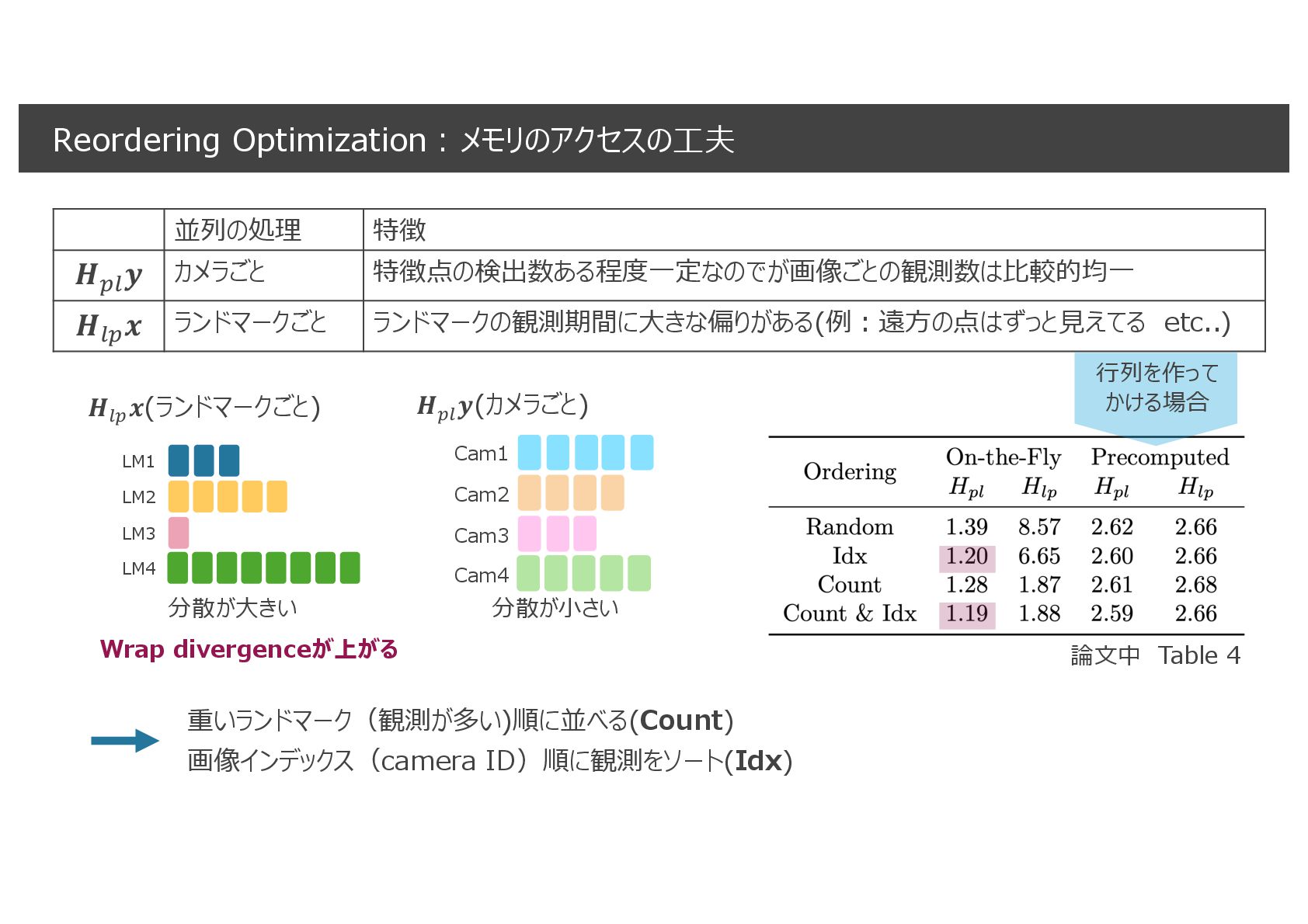
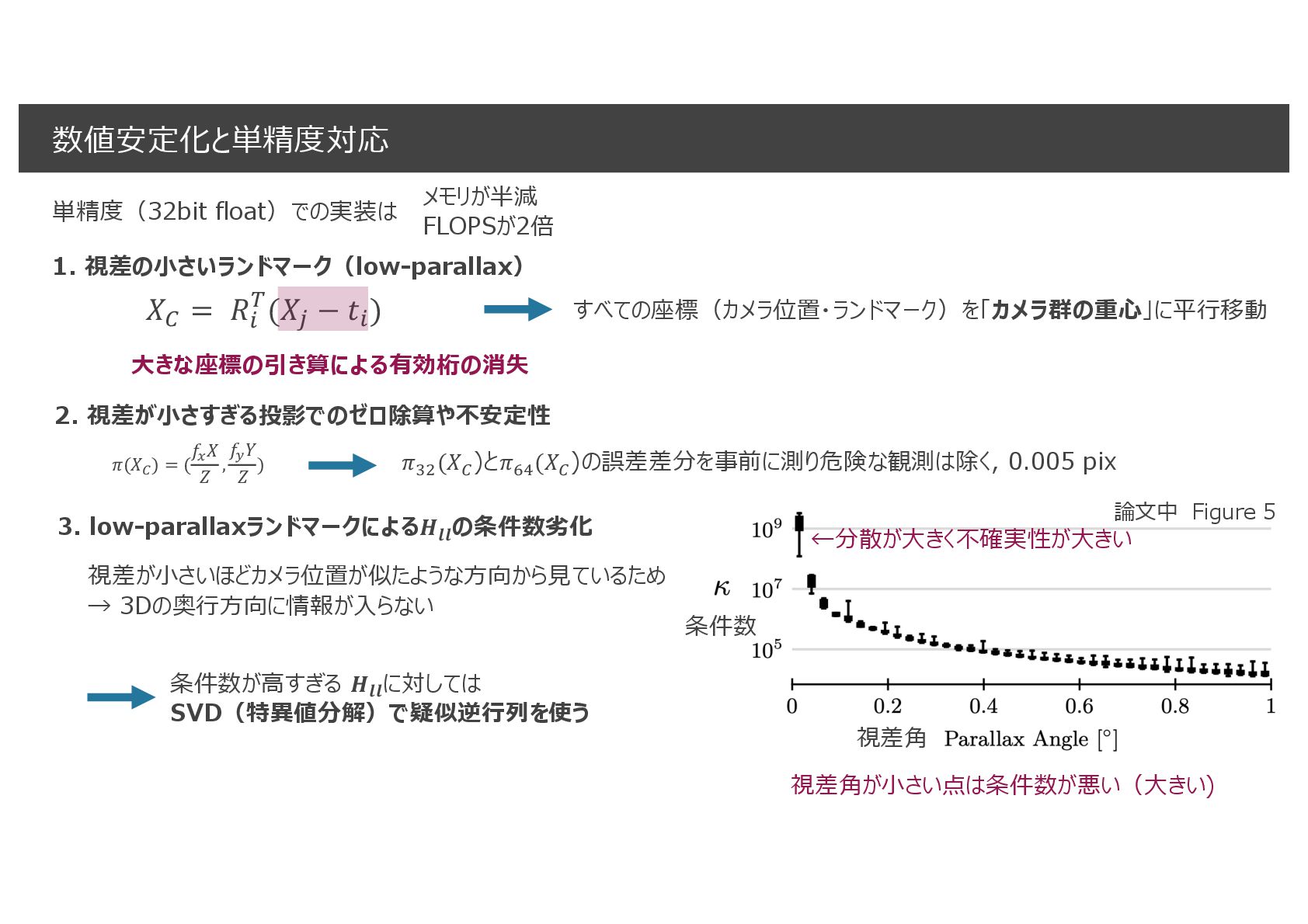
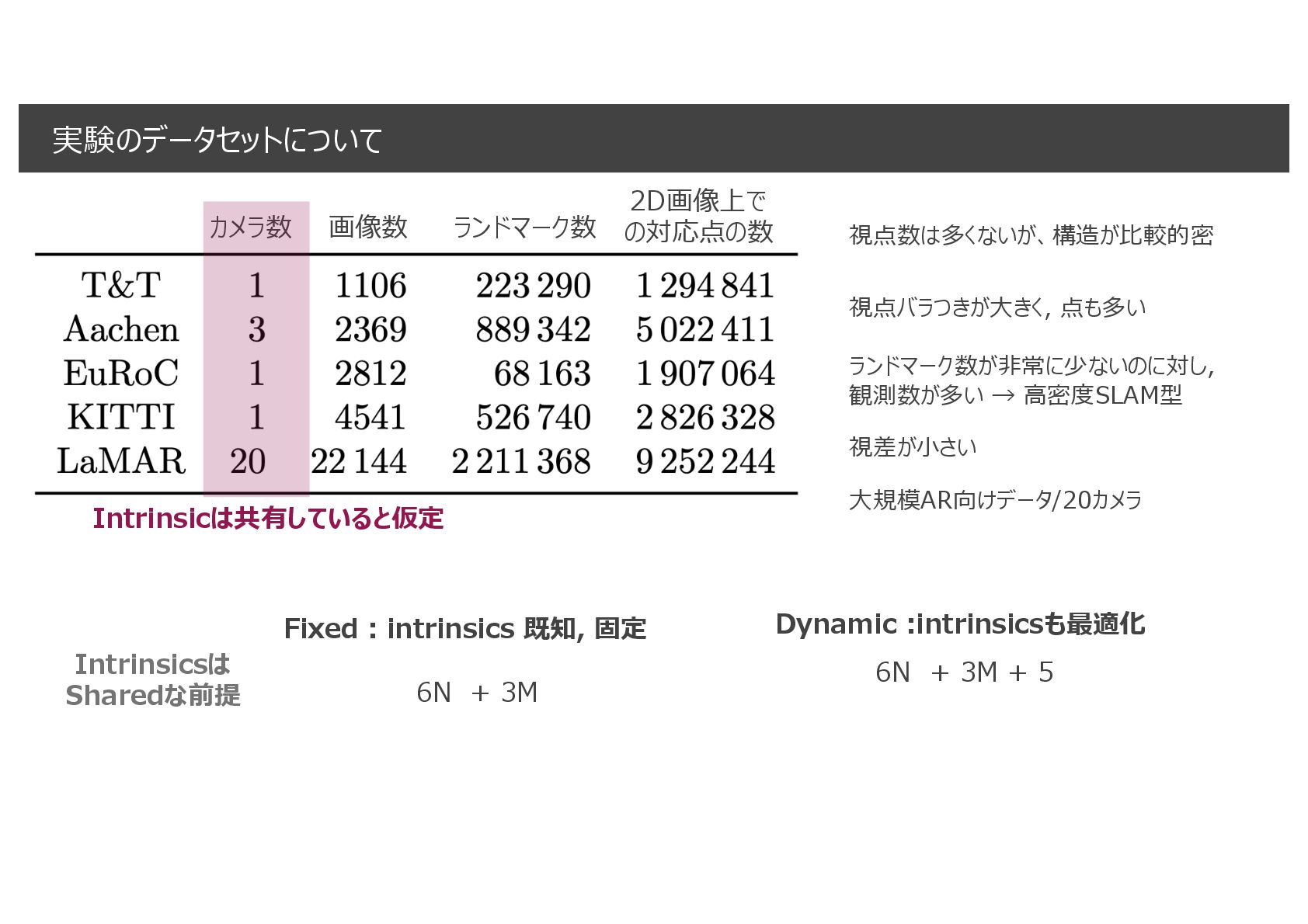
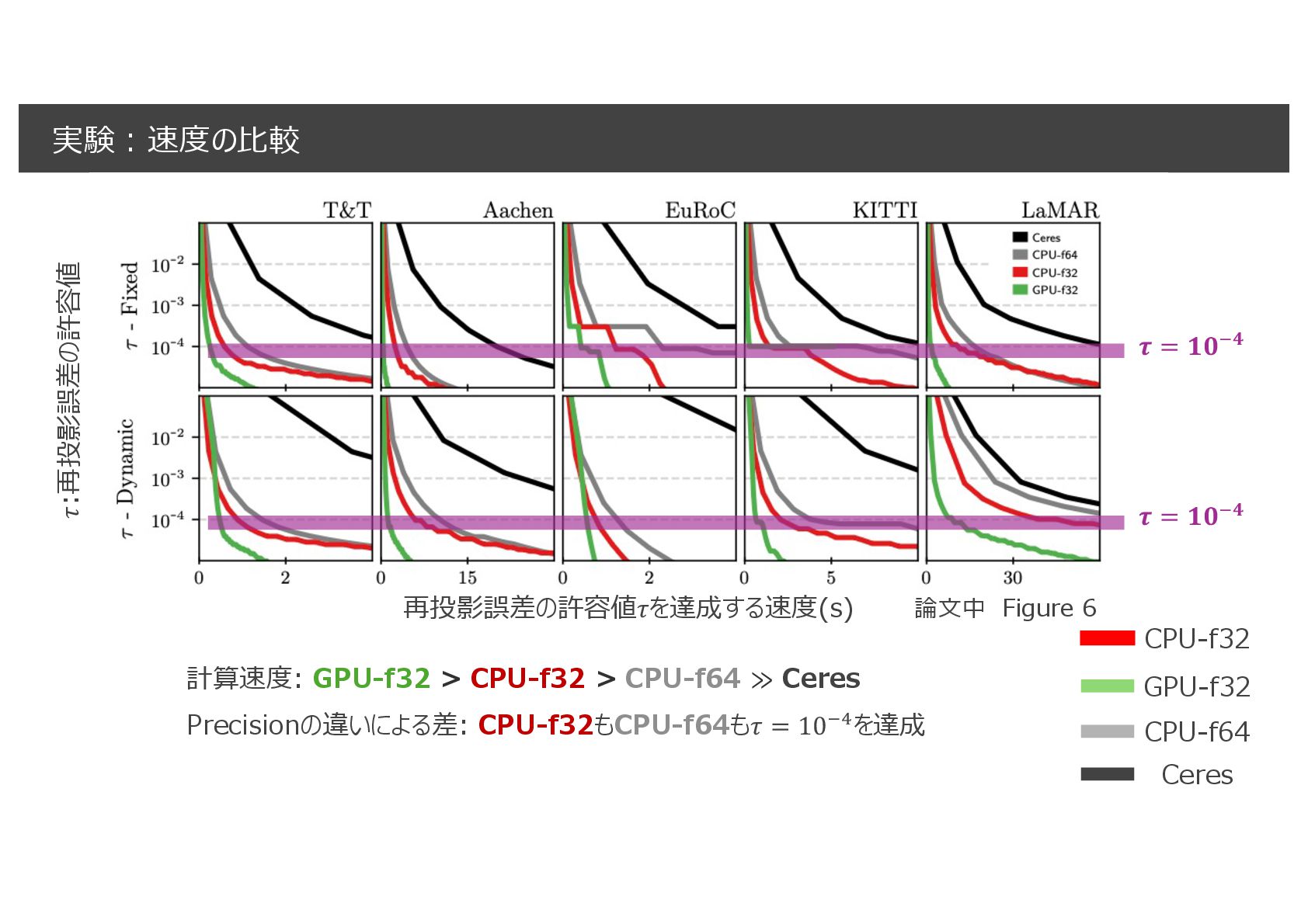
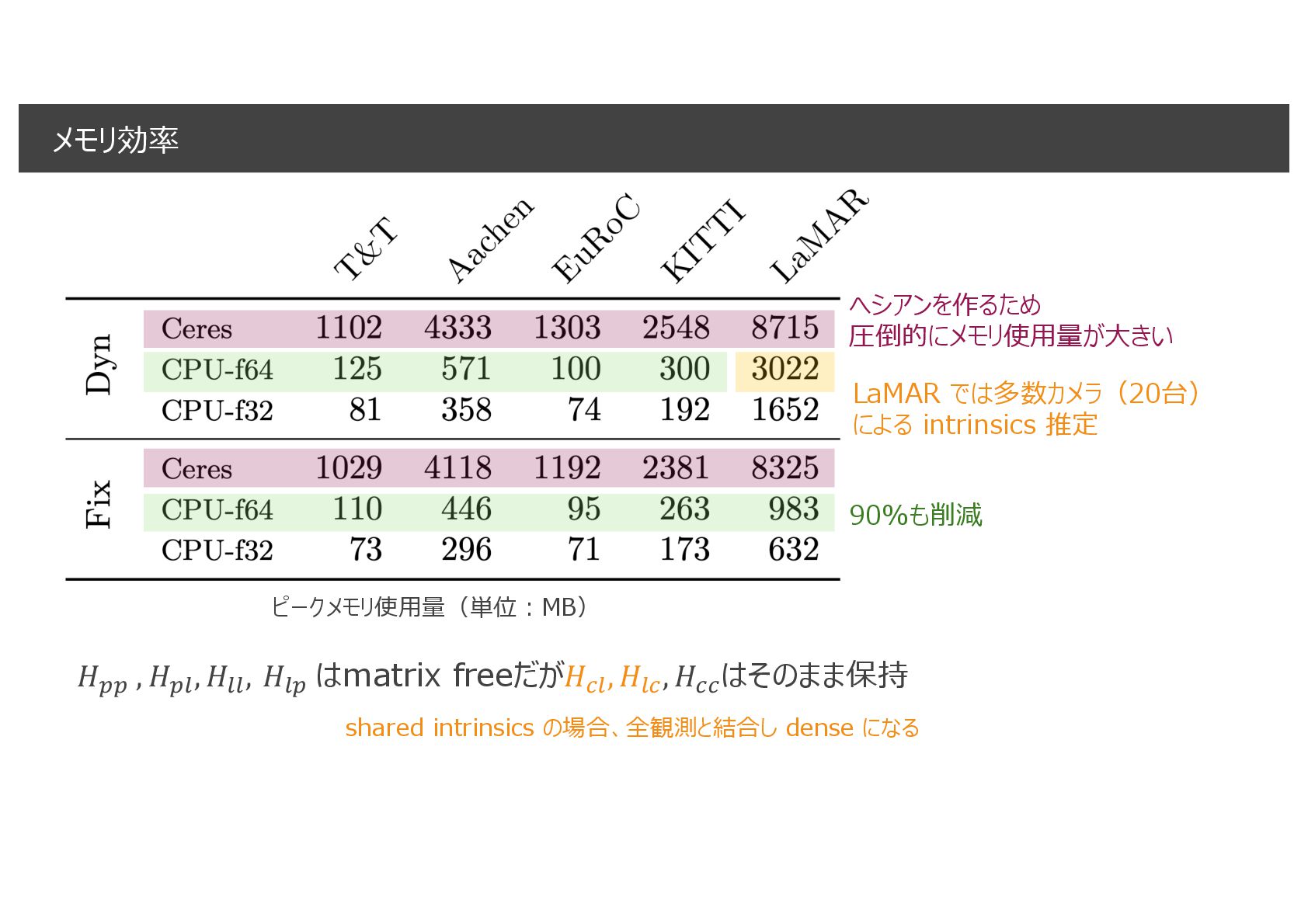
- 本研究は,全カメラで内部パラメータを共有する(shared intrinsics)という実用的前提を導入し, 巨大なHessian行列 (特にランドマークとカメラパラメータの混合項)を事前に構築せず、必要なときに逐次的に演算を行うMatrix-Free方式を採用し、高速な反復解を維持しながらメモリ消費を大幅に削減している。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}