Share
AWS Dev Day Online Japan 2021で発表した資料です。
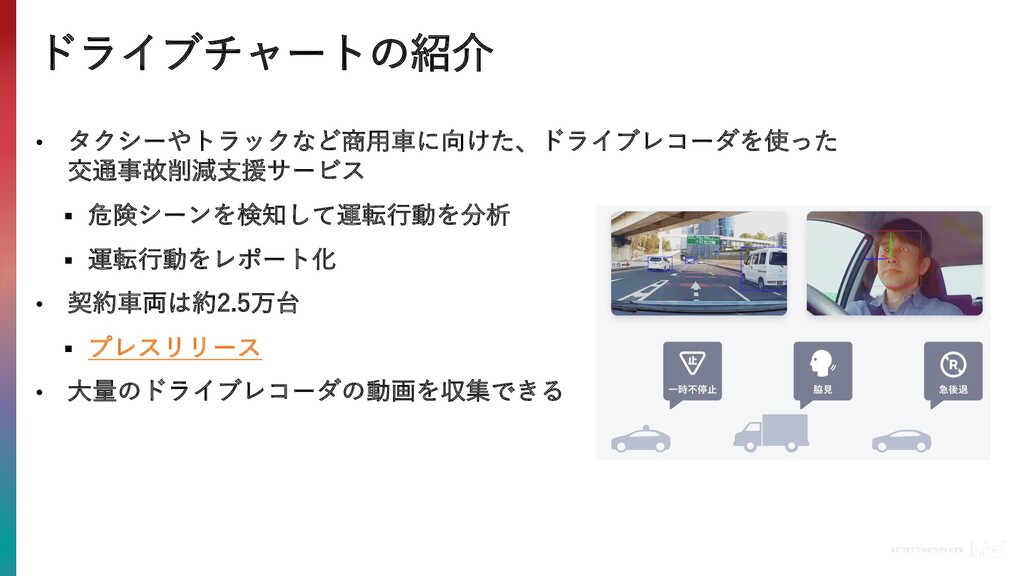
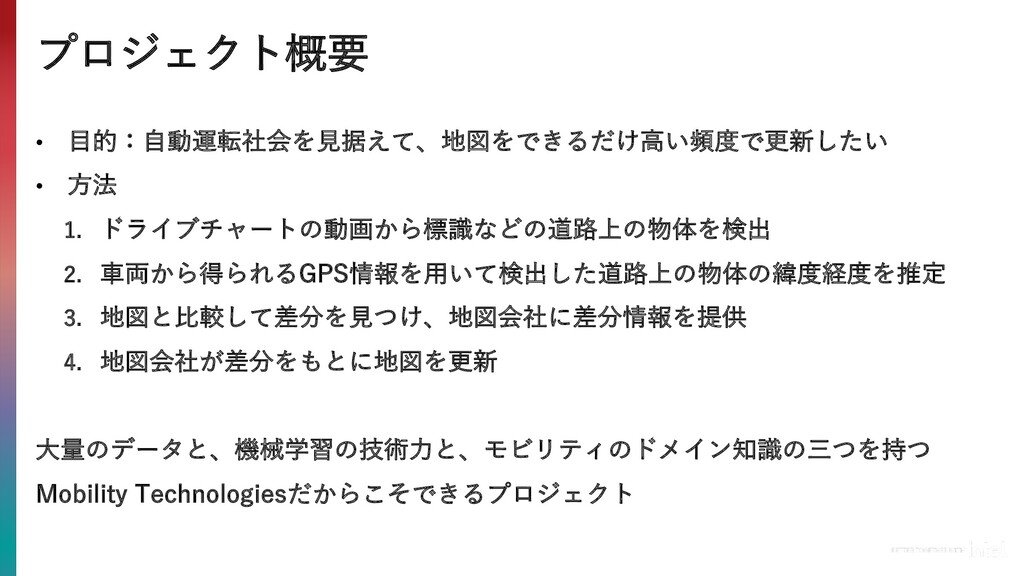
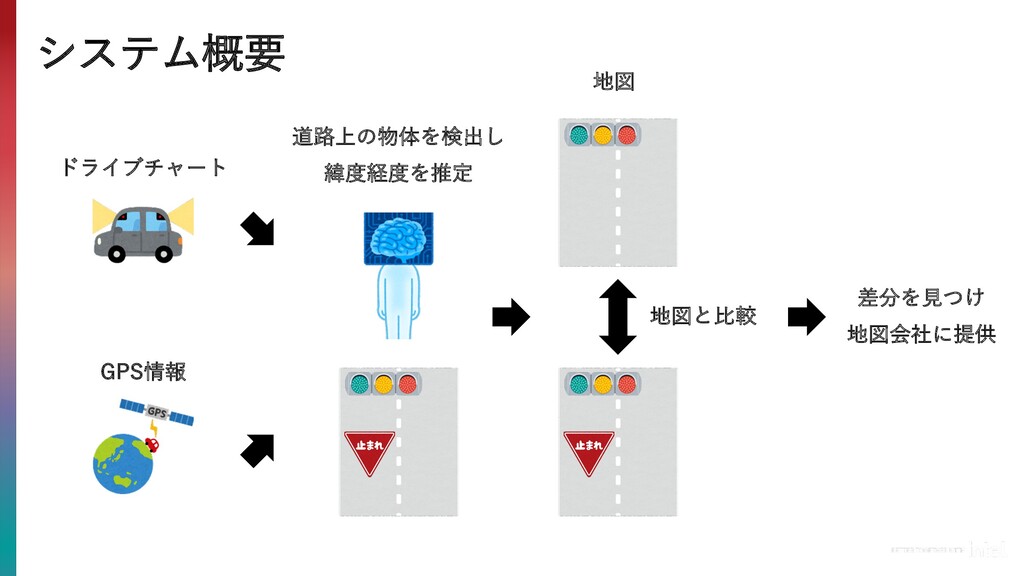
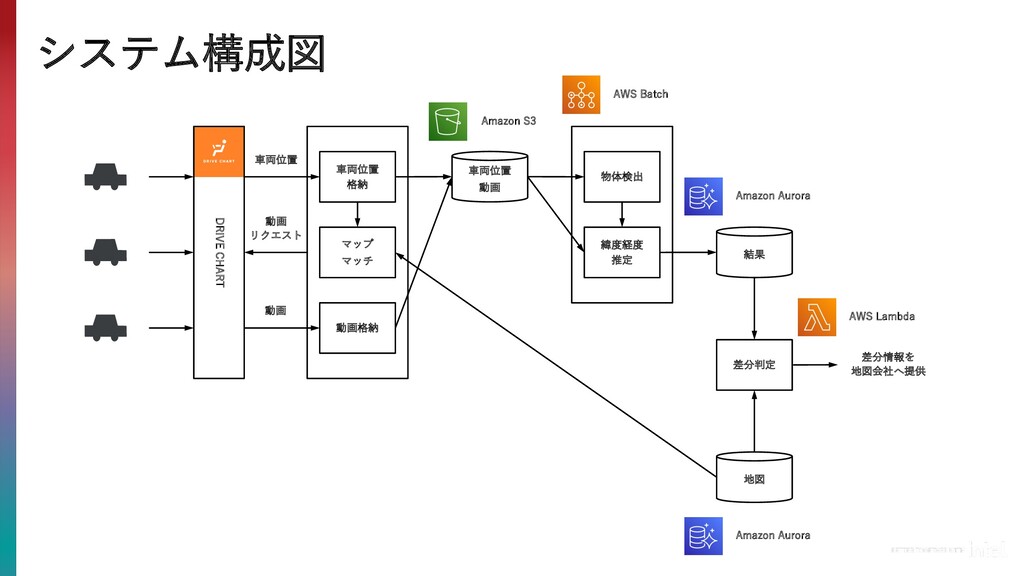
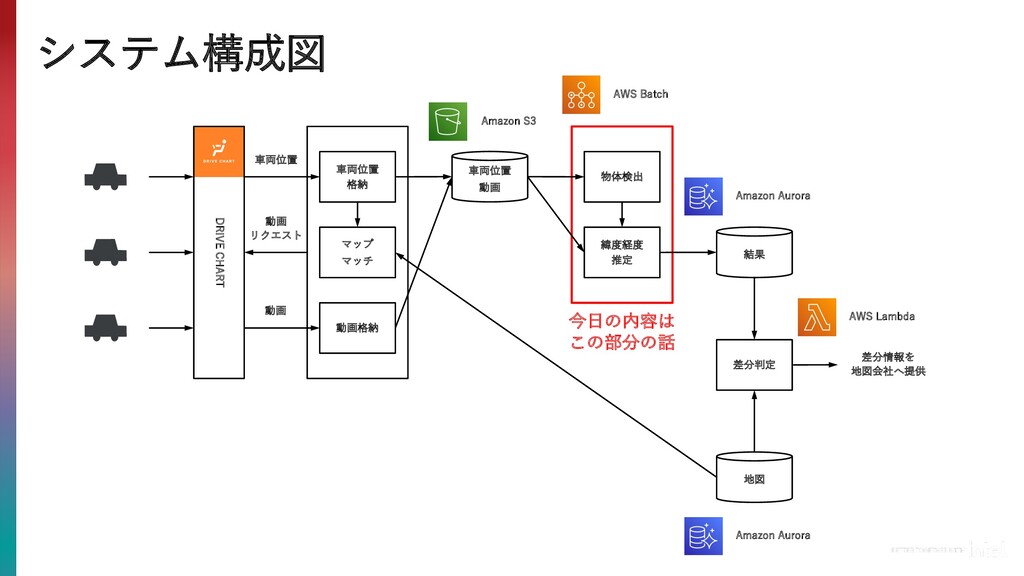
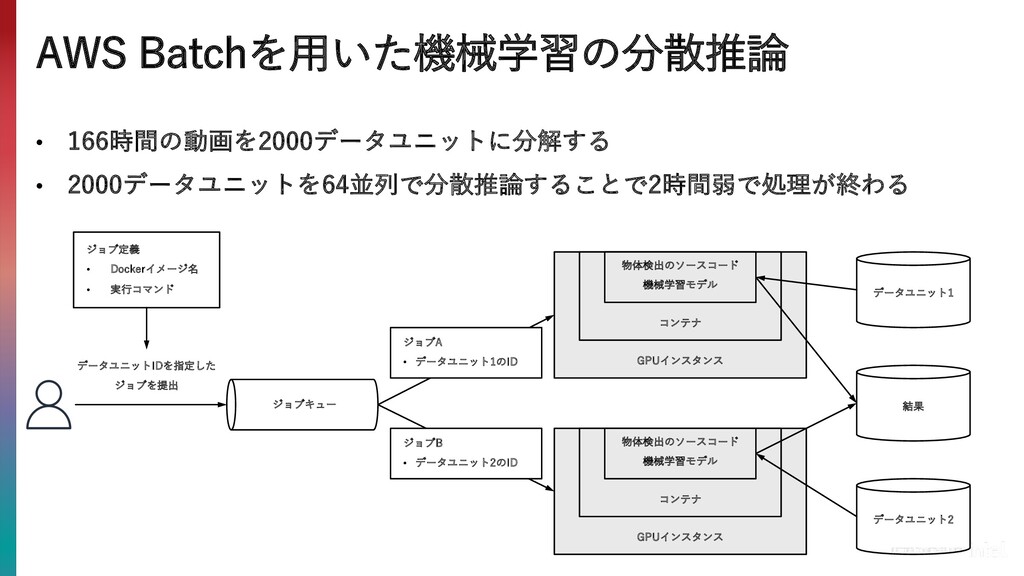
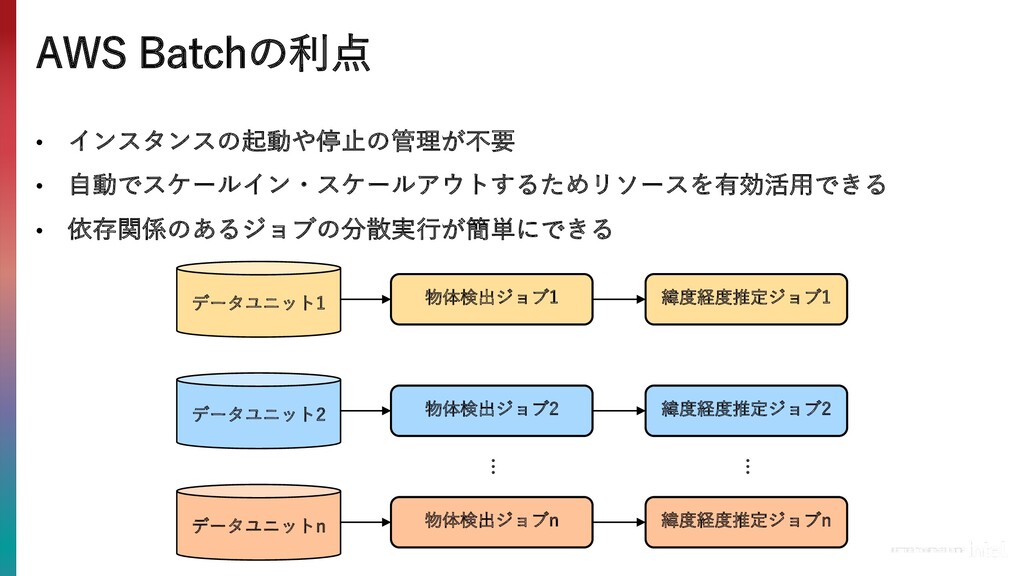
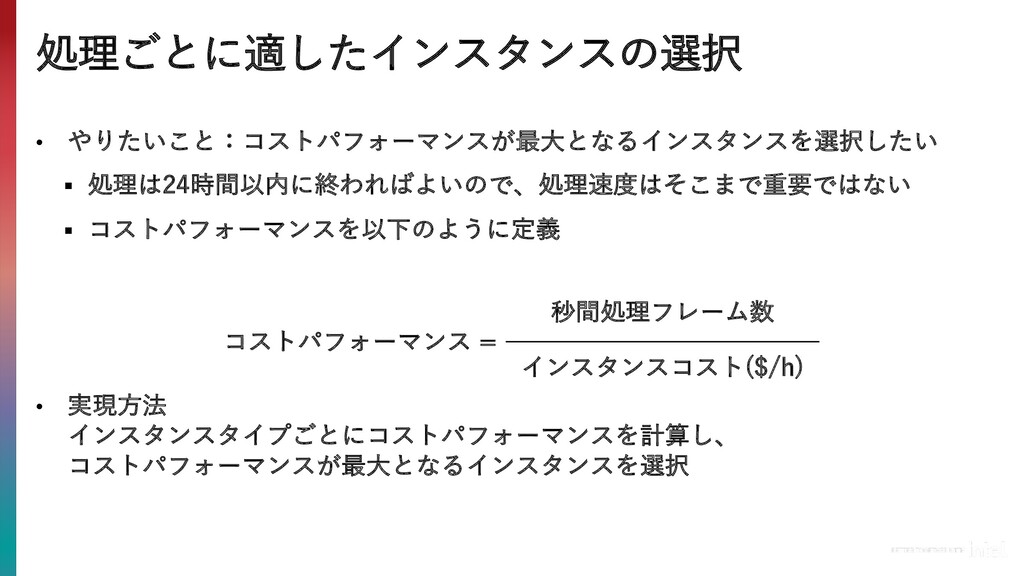
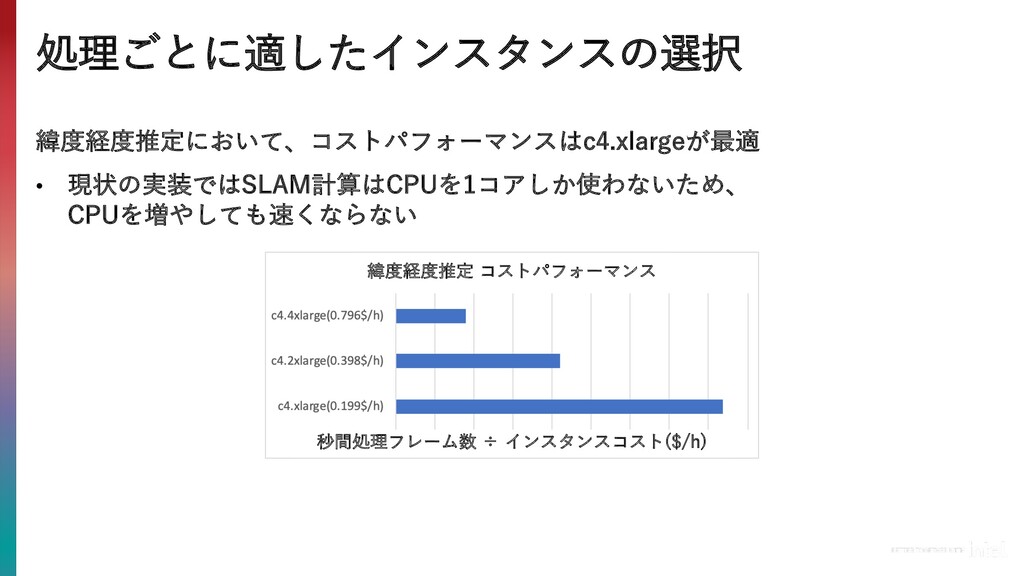
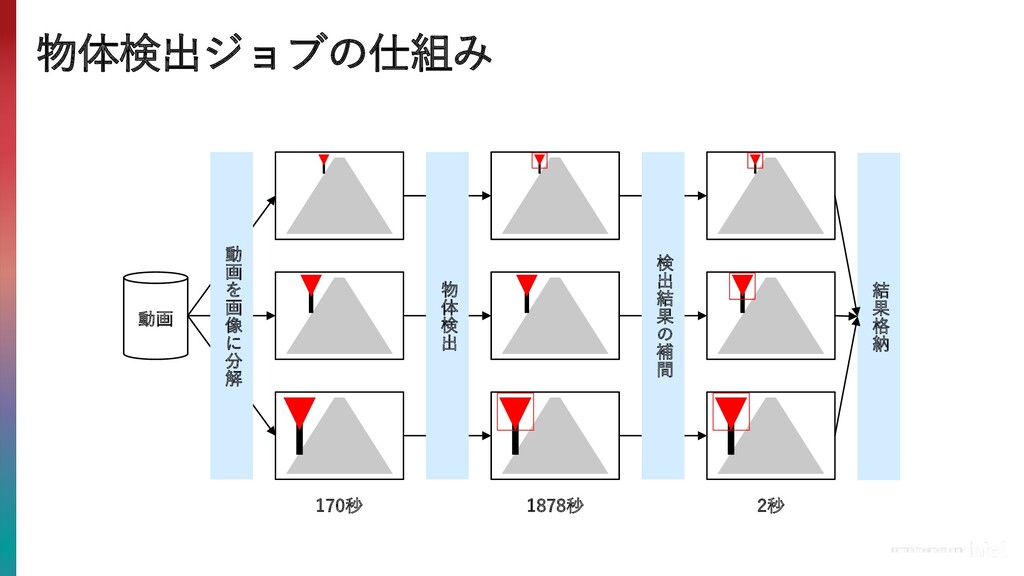
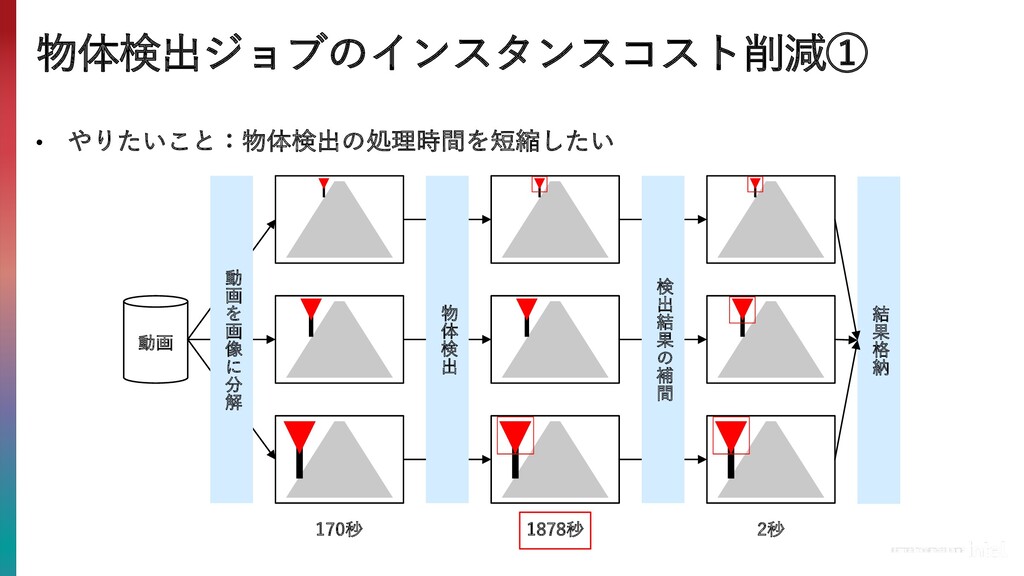
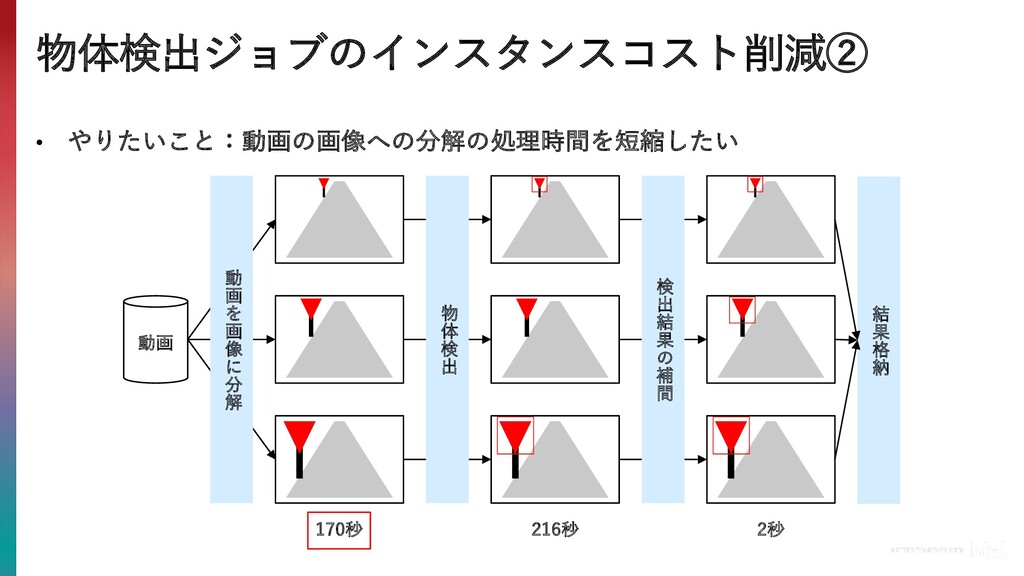
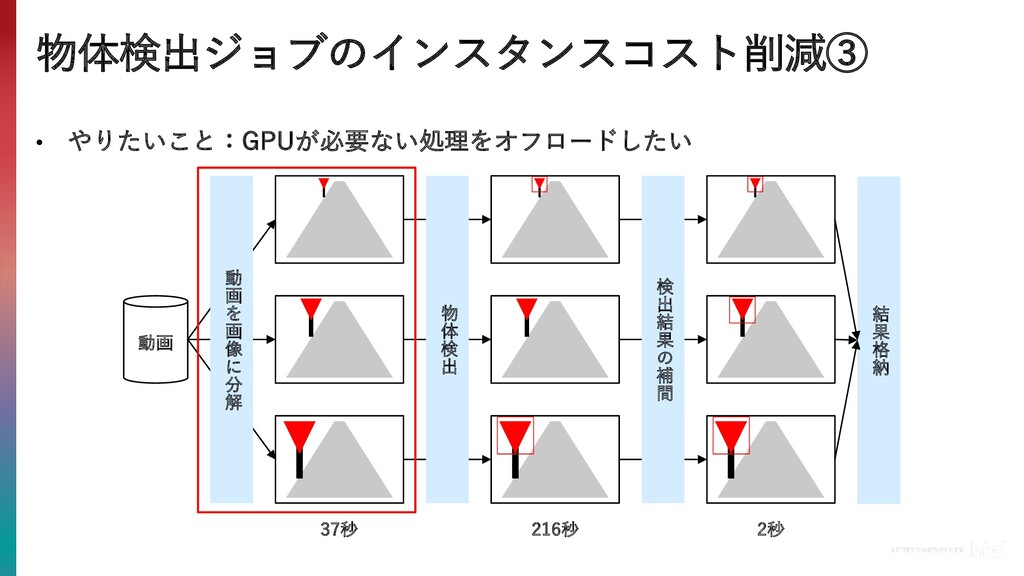
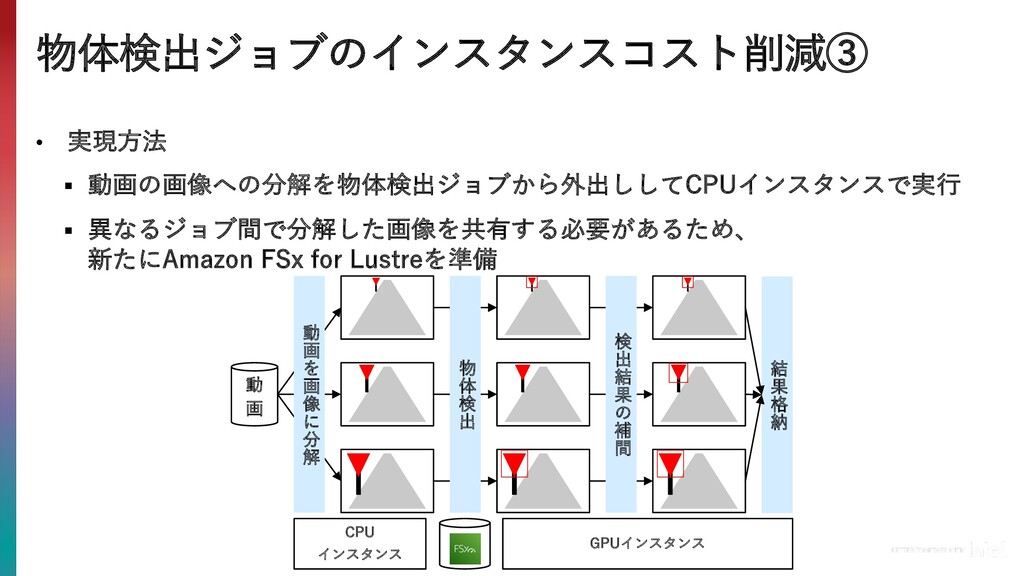
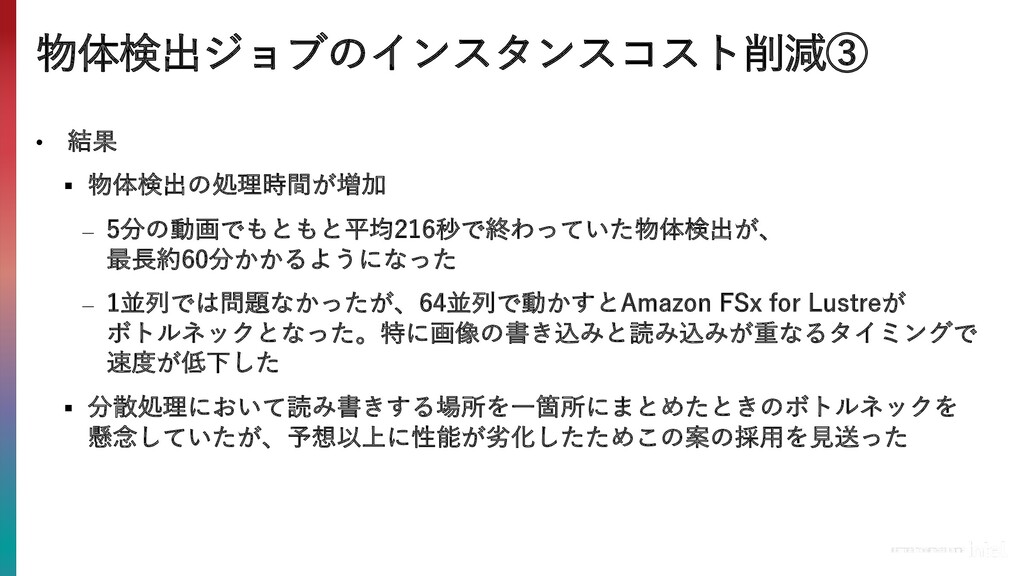
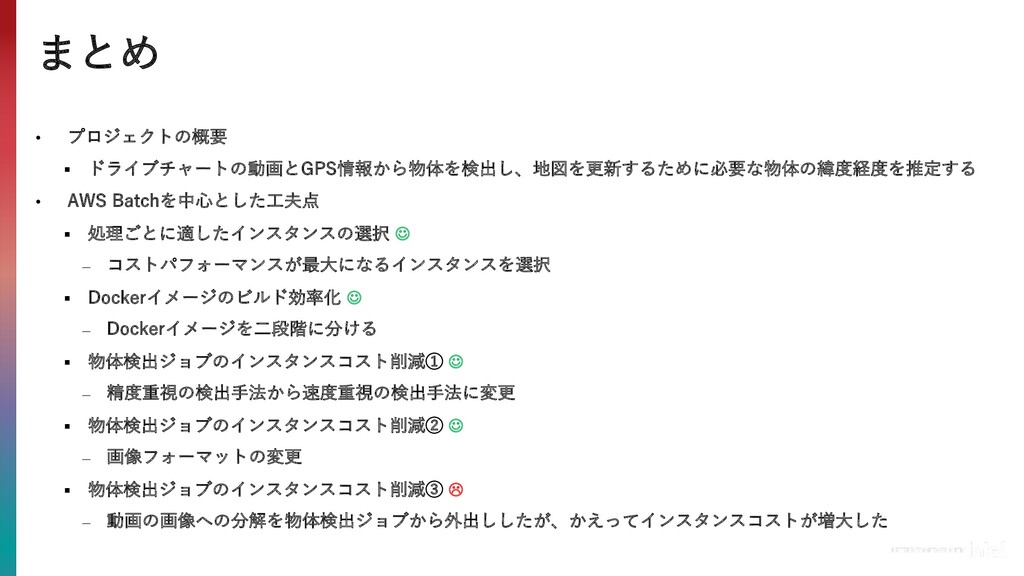
ドライブレコーダの映像から道路上の物体を検出し、検出した物体の緯度経度を推定するシステムをAWS Batchで構築しました。 AWS Batchを用いた機械学習の分散推論システムの構築方法や開発における工夫点などを紹介しています。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}