Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Dexmal 原力灵机
Search
TAKASU Masakazu
May 08, 2026
Business
25
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Dexmal 原力灵机
https://dexmal.com/
TAKASU Masakazu
May 08, 2026
More Decks by TAKASU Masakazu
See All by TAKASU Masakazu
RoboChallenge Annual Report Large Scale Real-Robot Evaluation for Embodied AI 2026 May 09
takasumasakazu
0
35
The STORY OF M5STACK 2026年 名古屋Station AI M5Stack名古屋ミートアップにて #M5JPTOUR2026
takasumasakazu
0
200
世界ヒューマノイドロボット運動会で見る、新技術と社会のつきあいかた 高須正和
takasumasakazu
0
49
海外ロボット人材育成最新動向 2025/Dec/06 iREX2025 Scramble講演にて
takasumasakazu
0
78
ROS2最適化ボード RDK X5による 敷居の低いROS教育 (TYPE-CでOS Imageが焼けるなど)
takasumasakazu
0
870
日本ロボット工業会:講演「中国のヒューマノイド・ロボットの開発と利用の最新動向」 20250625
takasumasakazu
1
3.8k
Scrambleのロボットキットで、「入会時にゼロから想いを説明してください」として作った資料
takasumasakazu
0
86
从机器人竞赛到软件系统实践:日本创客文化对技术创新的启
takasumasakazu
0
110
20250418_翻訳者の全技術maesetsu
takasumasakazu
0
83
Other Decks in Business
See All in Business
データ品質とメタデータ管理で実現する構造化・非構造化データ活用のユースケース紹介
kawanago
0
450
CSRレポート2026_ギークス株式会社
geechs
PRO
0
660
会社紹介資料/Idein株式会社
ideininc
0
110
station会社紹介資料
station_inc
PRO
0
150
今日から始めるセルフマネジメント/A Practical Guide to Self-Management
ikuodanaka
1
3.3k
新規事業立ち上げにPMMが果たすべき役割と責任 −スケールアップ企業における"プロダクトマーケティング"の可能性
yushimad
1
350
5年間コードを書かなかったVPoEが なぜ現場に戻ったのか?
gessy0129
1
270
自分を知ることから始まる生存戦略
peacemaker07
2
410
2026.7_中途採用資料.pdf
superstudio
PRO
5
120k
タスク分解も大事だけど、「文脈」を分解するのはもっと大事
masahagiwara
0
120
HappyLifeCreators株式会社 会社紹介資料
hlc_recruit
0
340
Sprocket会社紹介資料_20260701
sprocket
0
220
Featured
See All Featured
Winning Ecommerce Organic Search in an AI Era - #searchnstuff2025
aleyda
1
2.1k
The Art of Programming - Codeland 2020
erikaheidi
57
14k
B2B Lead Gen: Tactics, Traps & Triumph
marketingsoph
0
170
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.7k
GitHub's CSS Performance
jonrohan
1033
470k
Large-scale JavaScript Application Architecture
addyosmani
515
110k
The Myth of the Modular Monolith - Day 2 Keynote - Rails World 2024
eileencodes
28
3.6k
Product Roadmaps are Hard
iamctodd
55
12k
世界の人気アプリ100個を分析して見えたペイウォール設計の心得
akihiro_kokubo
PRO
72
40k
Lessons Learnt from Crawling 1000+ Websites
charlesmeaden
PRO
1
1.3k
Distributed Sagas: A Protocol for Coordinating Microservices
caitiem20
333
23k
The State of eCommerce SEO: How to Win in Today's Products SERPs - #SEOweek
aleyda
2
11k
Transcript
具身原生,开启物理智能
公司发展历程 公司正式成立 宣布完成2亿元天使轮融资 AI 国际顶赛 CVPR2025 RoboTwin,斩获“双臂 协作”赛道并列第一;全球机器人顶赛 ICRA 2025
ManiSkill-ViTac,荣获“纯触觉操控”和“触 觉传感器设计”两个赛道金牌 公司联合Hugging Face发起全球首个 具身智能的大规模真机评测平台 开源一站式 VLA 工具箱 ,推 出首款开源硬件产品 公司发表AI学术顶会论文十余篇, 代 表作Real-time VLA、MemoryVLA 和 SaptialActor 获得学界一致认可 完成近 A 轮融资由蔚来资本领投, A+轮融资阿里巴巴为独家投资方 与Hugging Face、智源研究院、 智 元机器人、Qwen、星海图、自变 量、清华大学、西安交通大学、 GOSIM 等共同成立RoboChallenge 组委会 2025年3月 2025年5月 2025年10月 2025年11月 2026年2月 ,取 得RoboChallenge榜单双项全球第一 发布,与RLinf 达成战略合 作,携手清华大学及无问芯穹打造具 身智能的PyTorch 发布 具身原生应用量产工作流
核心优势 在AI物流机器人领域拥有 深厚积累 具备软硬件一体化解决 方案能力 团队拥有 AI 顶尖学术背景 多来自知名高校及研究机构 具备10余年
AI原生产品规模化落地经验 具备行业稀缺的“算法 + 硬件 + 场景”复合基因
顶级团队:极稀缺的兼备大规模基模训练、AI技术突破、规模 化AI机器人落地、高可靠硬件量产能力的团队 • 旷视第6号员工,组建旷视研究院,管理百余人算法团队 • IOI金牌;软硬一体化算法专家; 清华姚班第一名 • 国内最早引入CNN降噪算法的端上实现 •
开发国内第一颗纯NPU-ISP,开创“黑光”IPC新品类 • 开发全球第一颗基于AI算法的屏下光学指纹识别产品,积 累出货 2亿+颗 多领域顶尖复合型人才 范浩强 联合创始人 • IOI金牌;NIST FRVT2018冠军; 中国首届人工智能大赛人脸组金 奖;清华大学电子工程系毕业 • 旷视第12号员工,旷视科研院轮 值院长 • 旷视人脸算法负责人,算法覆盖 各旷视人脸产品线 • 旷视深度学习训练框架天元 MegEngine负责人 周而进 联合创始人 稀缺的大规模基础模型训练经验 唐文斌 联合创始人 / CEO • 旷视科技联合创始人,清华姚班毕业,计算机科学硕士 • 荣膺首届Yao Award,并率队斩获ACM/ICPC世界总决赛全 球第六(亚洲第一); 任中国信息学奥林匹克国家队总教 练长达七年 • 从0到1领导构建旷视物流机器人业务并开发机器人网络 操作系统旷视河图 • 主导旷视从顶尖科研团队向产业化落地的转型,实现多 个业务多年飞速增长 规模化AI机器人落地 大规模基础模型训练 • 旷视科技高级算法研究员 • 在CVPR、ICCV等累计发表论文30 余篇,成果入选2022年最具影响 力的100篇AI论文 • ECCV2022 DanceTrack国际挑战赛、 CVPR2023自动驾驶国际挑战赛冠 军;入选Elsevier世界前2%科学 家 汪天才 联合创始人 智驾端到端算法训练及落地经验 • 智元制造部负责人,实现国内首 个人形机器人商用量产,月产超 300 台、首批千台下线 • 禾赛制造部1号员工,建成国内首 座激光雷达量产工厂 • 负责管理苹果中国代工厂,深度 参与 iPhone、MacBook 等产品量 产爬坡 • 清华机械系;MIT制造学硕士 张绍政 联合创始人 丰富的高可靠具身硬件量产经验
打造智能的、有用的、可信赖的机器人 Build Intelligent, Useful, and Trustworthy Robots For a Better
Life
产品策略 模型解锁场景、场景定义硬件 原力灵机确立了“先模型,后本体”的发展路径
技术验证期把最大可能性推向极限 场景应用 pplication 基础设施 nfra 原生模型 odel 最泛化的 具身模型 最强
迭代效率 最快 数据飞轮
面向通用具身智能 一个模型,多本体、多感知、多场景 具身原生大模型
技术理念:具身原生 Embodied Native 智能本质和形成机制都根植于物理交互的新AI范式 数据原生 • 真实世界全要素数据 • 具身多模态数据 •
具身感知数据 • 从0开始,学习物理世界交互 训练原生 • 理解世界、影响世界,预测世界, 一起训练 • 模型为真实世界设计,用真实世 界效果评价 • Reward来自真机效果 架构原生 • 多模态支持 • 记忆能力 • 通用Action能力
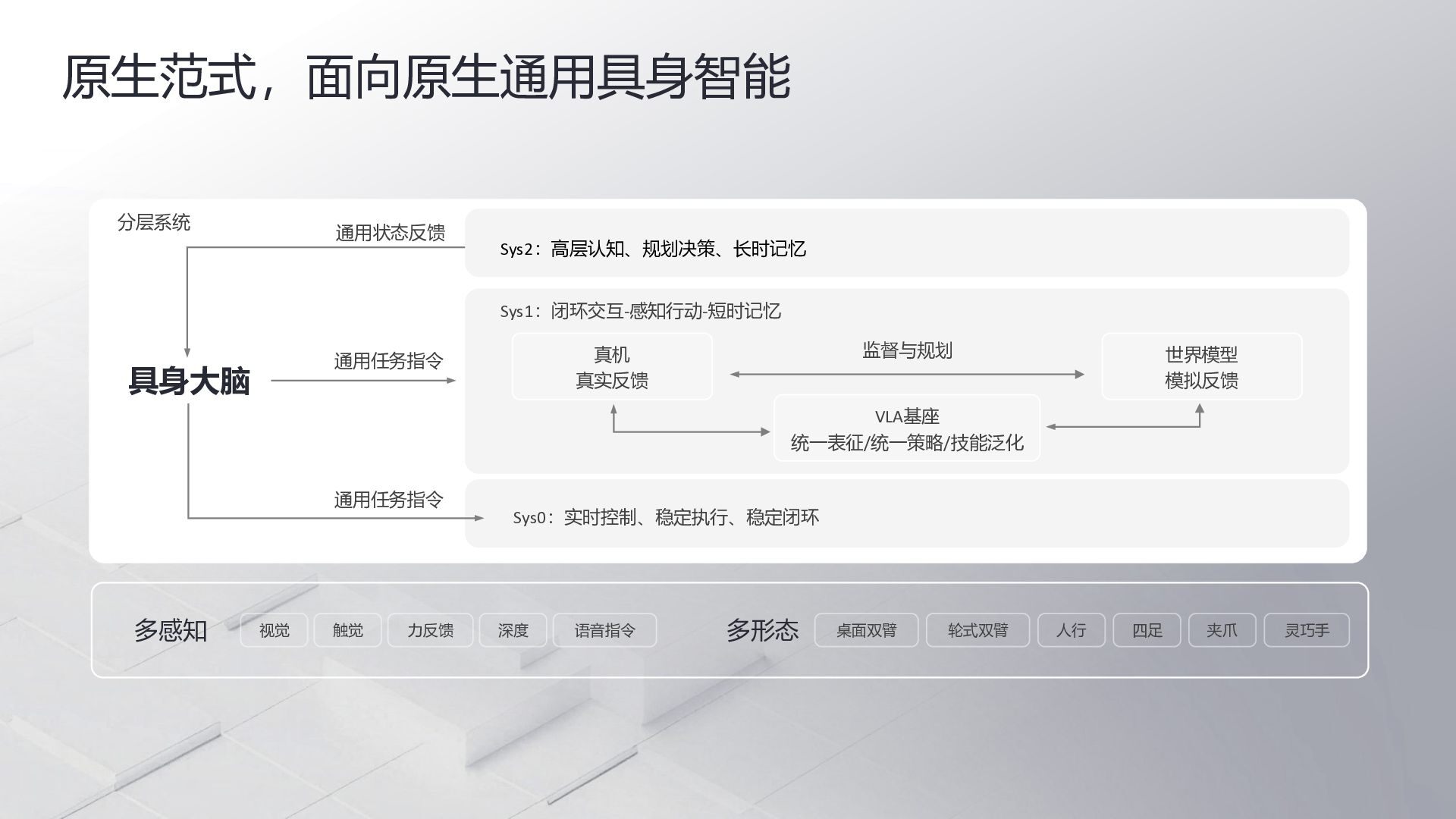
原生范式,面向原生通用具身智能 具身大脑 Sys0:实时控制、稳定执行、稳定闭环 Sys1:闭环交互-感知行动-短时记忆 多感知 视觉 触觉 力反馈 深度 语音指令
多形态 桌面双臂 轮式双臂 人行 四足 夹爪 灵巧手 通用状态反馈 通用任务指令 通用任务指令 真机 真实反馈 VLA基座 统一表征/统一策略/技能泛化 世界模型 模拟反馈 监督与规划 分层系统 Sys2:高层认知、规划决策、长时记忆
打造类人类智能系统的算法架构,实现High level 智能目标 以大规模 模型为基座, 和 协同强化, 持续提升模型能力 底色代表Dexmal和其他公司的差异化 Env-环境
全球首个 多源数据基座VLM大模型 类比人类多传感系统 通用行动 通用观测 真机 真实反馈 世界模型 模拟反馈 Sys 1 Sys 0:实时控制、精细执行、稳定闭环 Sys 2:高层认知、规划决策、长时记忆 VLM Pretrain 真实世界 RL VLA基座 统一表征/统一策略/技能泛化 监督与规划 智驾数据 具身多模态数据 互联网数据
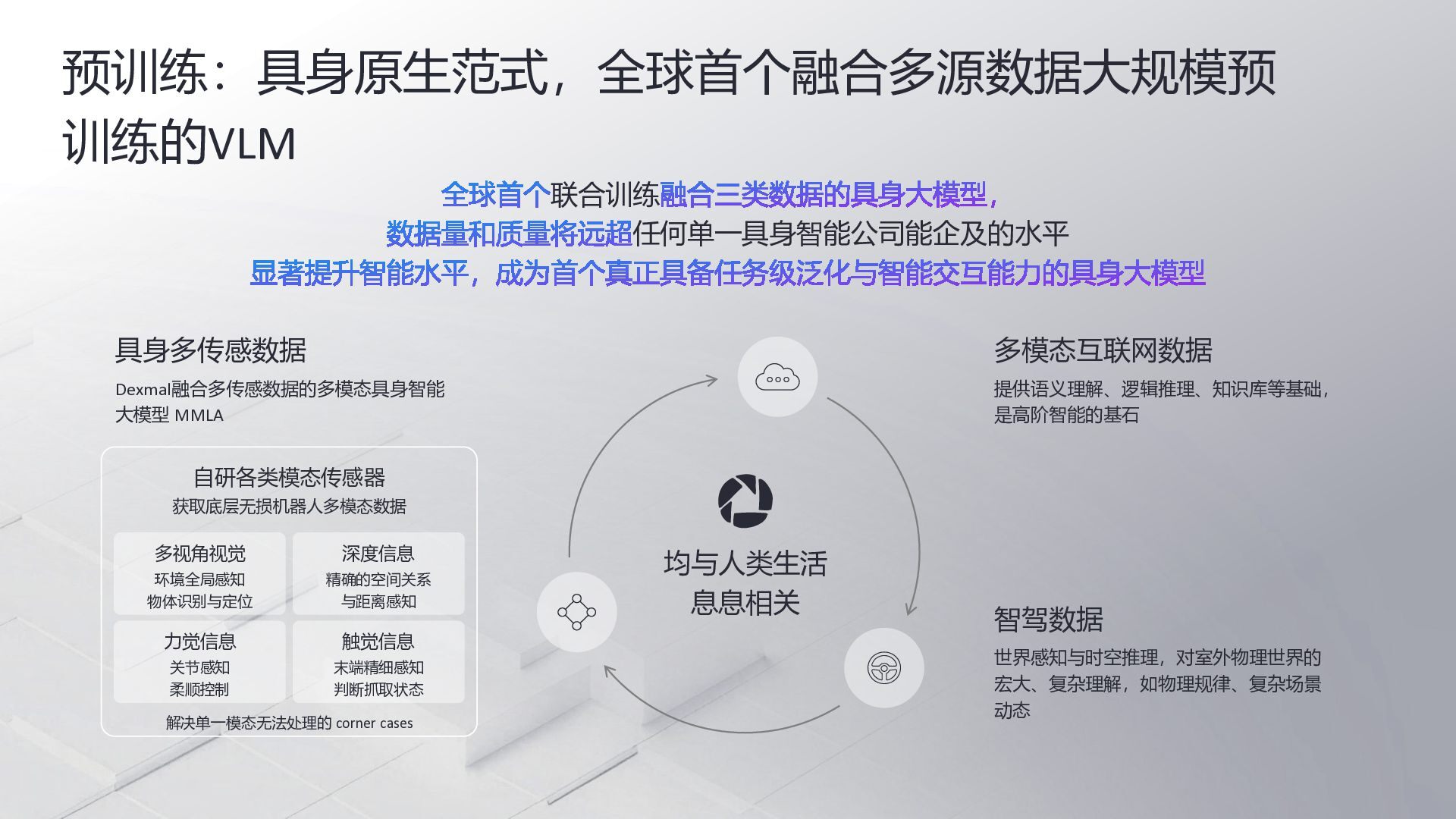
预训练:具身原生范式,全球首个融合多源数据大规模预 训练的VLM 联合训练 任何单一具身智能公司能企及的水平 具身多传感数据 Dexmal融合多传感数据的多模态具身智能 大模型 MMLA 自研各类模态传感器 获取底层无损机器人多模态数据
解决单一模态无法处理的 corner cases 均与人类生活 息息相关 多模态互联网数据 提供语义理解、逻辑推理、知识库等基础, 是高阶智能的基石 智驾数据 世界感知与时空推理,对室外物理世界的 宏大、复杂理解,如物理规律、复杂场景 动态 多视角视觉 环境全局感知 物体识别与定位 深度信息 精确的空间关系 与距离感知 力觉信息 关节感知 柔顺控制 触觉信息 末端精细感知 判断抓取状态
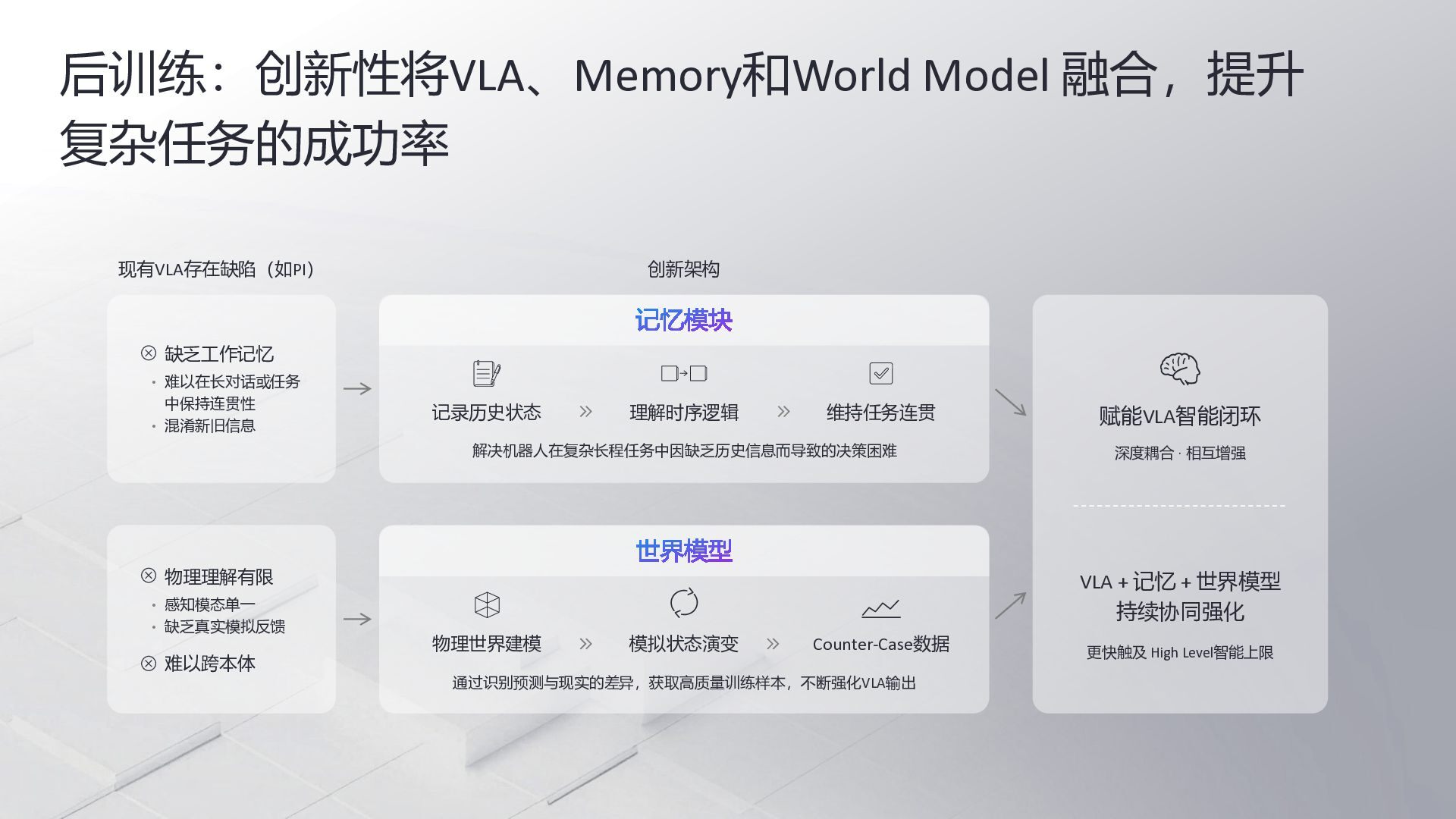
后训练:创新性将VLA、Memory和World Model 融合,提升 复杂任务的成功率 现有VLA存在缺陷(如PI) 缺乏工作记忆 • 难以在长对话或任务 中保持连贯性 •
混淆新旧信息 物理理解有限 • 感知模态单一 • 缺乏真实模拟反馈 难以跨本体 创新架构 维持任务连贯 理解时序逻辑 记录历史状态 解决机器人在复杂长程任务中因缺乏历史信息而导致的决策困难 Counter-Case数据 模拟状态演变 物理世界建模 通过识别预测与现实的差异,获取高质量训练样本,不断强化VLA输出 赋能VLA智能闭环 深度耦合 · 相互增强 VLA + 记忆 + 世界模型 持续协同强化 更快触及 High Level智能上限
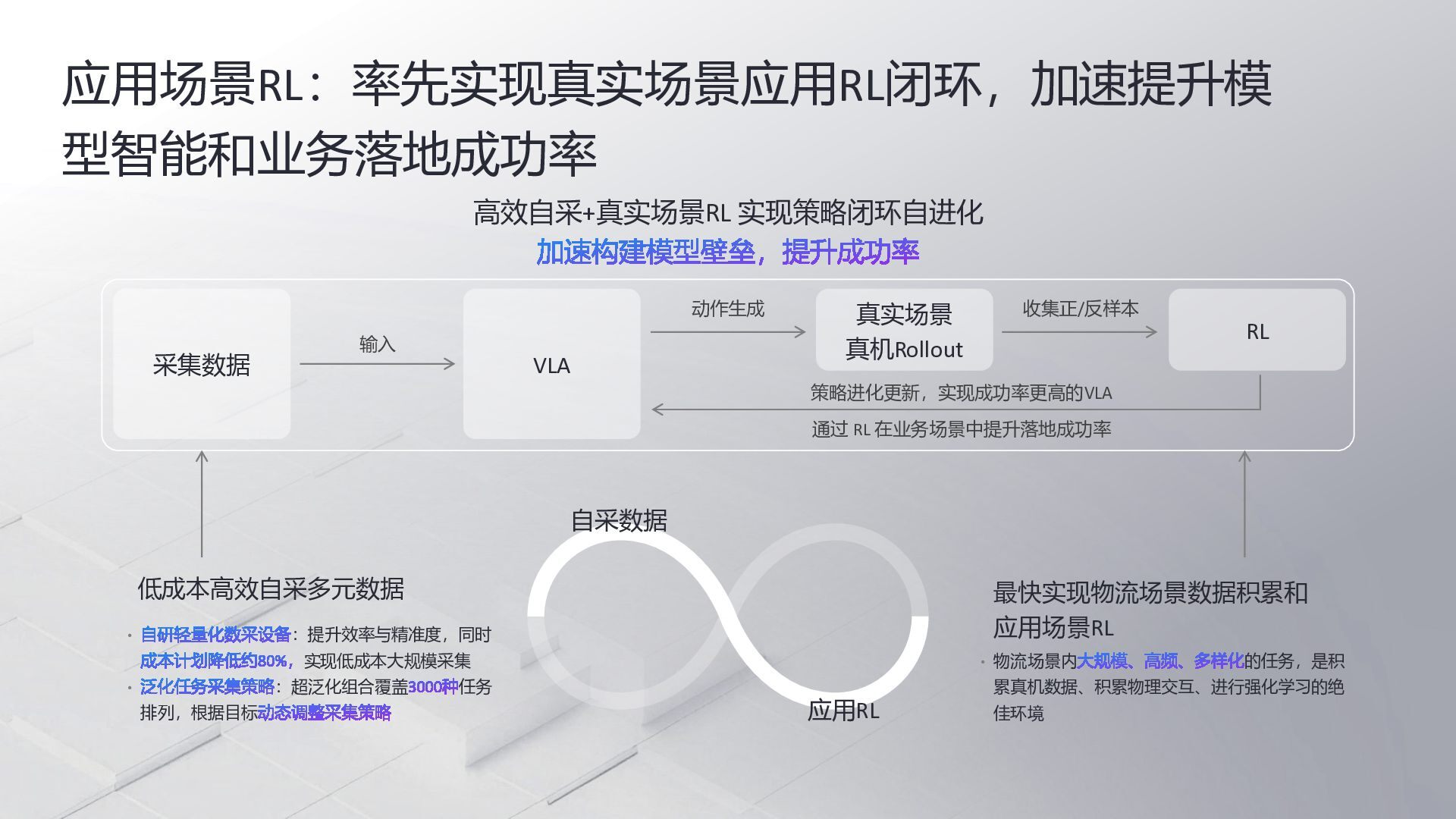
应用场景RL:率先实现真实场景应用RL闭环,加速提升模 型智能和业务落地成功率 高效自采+真实场景RL 实现策略闭环自进化 采集数据 RL 真实场景 真机Rollout VLA 输入
收集正/反样本 动作生成 策略进化更新,实现成功率更高的VLA 通过 RL 在业务场景中提升落地成功率 • :提升效率与精准度,同时 实现低成本大规模采集 • :超泛化组合覆盖 任务 排列,根据目标 低成本高效自采多元数据 • 物流场景内 的任务,是积 累真机数据、积累物理交互、进行强化学习的绝 佳环境 最快实现物流场景数据积累和 应用场景RL 应用RL 自采数据
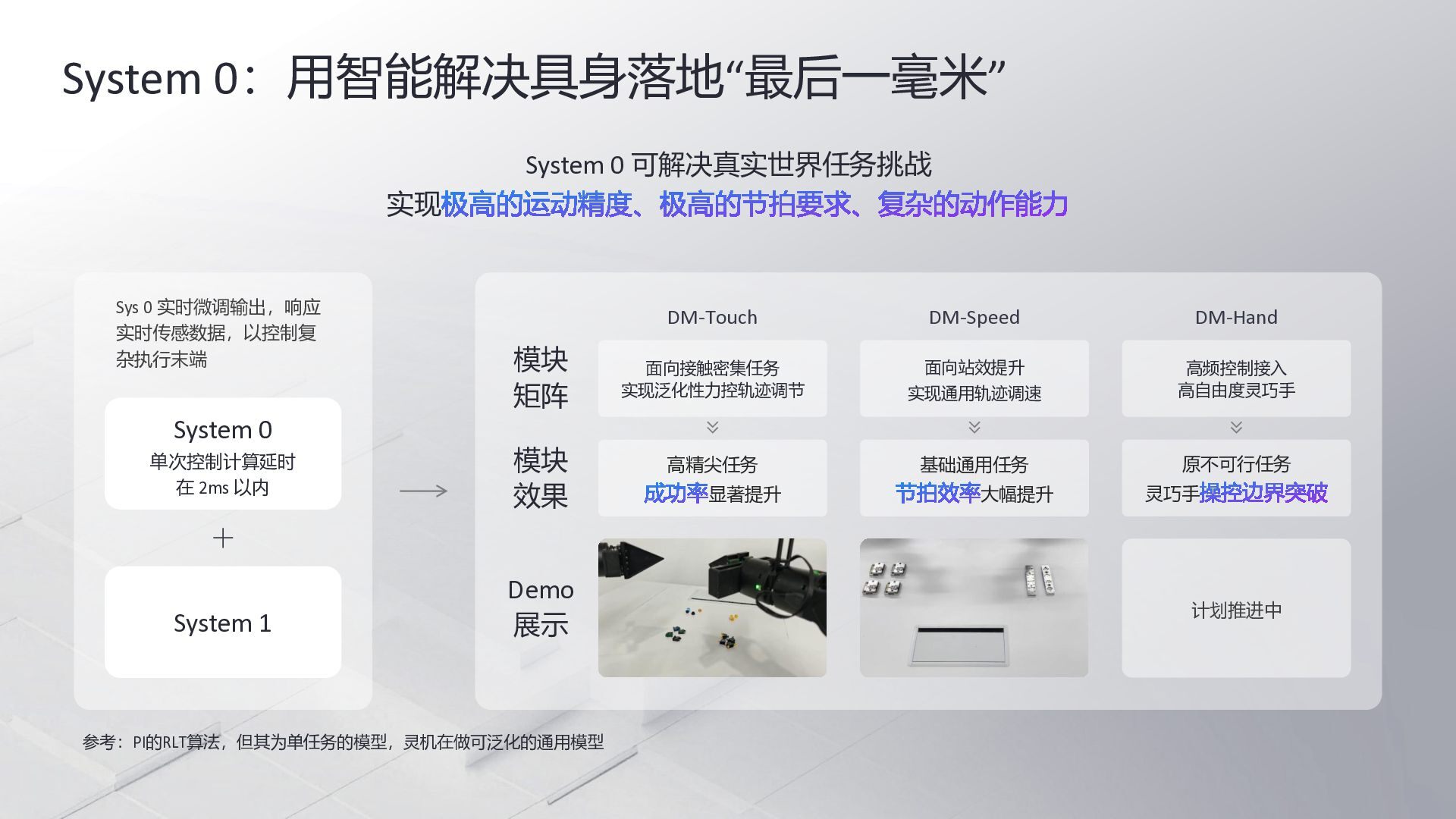
System 0:用智能解决具身落地“最后一毫米” System 0 可解决真实世界任务挑战 实现 参考:PI的RLT算法,但其为单任务的模型,灵机在做可泛化的通用模型 Sys 0 实时微调输出,响应
实时传感数据,以控制复 杂执行末端 System 1 System 0 单次控制计算延时 在 2ms 以内 模块 矩阵 模块 效果 DM-Hand 高频控制接入 高自由度灵巧手 原不可行任务 灵巧手 Demo 展示 DM-Touch 面向接触密集任务 实现泛化性力控轨迹调节 高精尖任务 显著提升 DM-Speed 面向站效提升 实现通用轨迹调速 基础通用任务 大幅提升 计划推进中
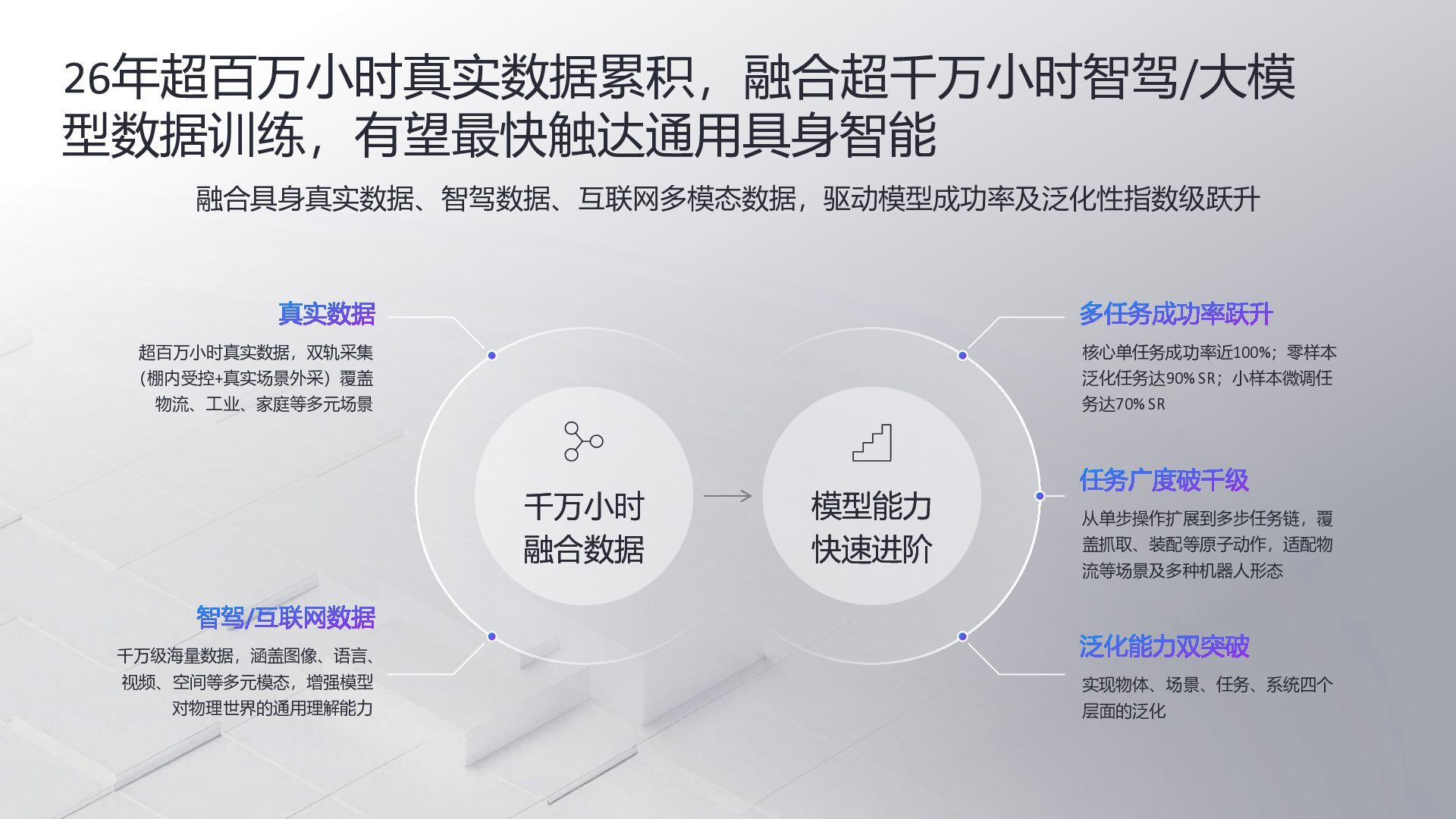
26年超百万小时真实数据累积,融合超千万小时智驾/大模 型数据训练,有望最快触达通用具身智能 融合具身真实数据、智驾数据、互联网多模态数据,驱动模型成功率及泛化性指数级跃升 千万小时 融合数据 千万小时 融合数据 模型能力 快速进阶 模型能力
快速进阶 超百万小时真实数据,双轨采集 (棚内受控+真实场景外采)覆盖 物流、工业、家庭等多元场景 千万级海量数据,涵盖图像、语言、 视频、空间等多元模态,增强模型 对物理世界的通用理解能力 核心单任务成功率近100%;零样本 泛化任务达90% SR;小样本微调任 务达70% SR 从单步操作扩展到多步任务链,覆 盖抓取、装配等原子动作,适配物 流等场景及多种机器人形态 实现物体、场景、任务、系统四个 层面的泛化
以通用具身智能为底座,撬动物流场景万亿美金级新增市场 • 目前 纯人工 • 全球人工 • 人工占比全仓 实现任务 完成
• 人工参与度 • 全球人工 • 人工占比全仓 精准识别 万物抓取 泛化分装 复核物品 装箱/袋 填充气泡袋 缠保鲜膜 封箱 贴快递单 实现 步骤:从订单箱到打包台进行包装 步骤:从来源把物品放入订单箱 模型能力 持续提升
DM原生大模型:更泛化、更智能 2026.2月 • 原子动作:广义动作、 精细操纵、双手协作 • 数分钟任务 2026.7月 • 跨物品、跨场景泛化:
• 数十分钟复杂长程任务 • 零样本学习开箱即用 • 封闭场景特定任务 2026.12月 • 跨任务、跨本体泛化 • 小时级复杂任务 • 多技能开箱即用 • 稳定运行封闭场景任务
多任务跨机型训练 我们希望模型忘记‘电机的参数’, 真正学到操作的本质,就像老司机换了一辆车,依然会开一样。 3类核心任务 8类机器人 导航 全身控制 操作 UR Franka
ARX UMI Aloha Galaxea Realman DOS-W1
构建空间推理思维链 Pick the flower vase from the table 201, 10,
155, 75, 100, 122, 5 [a_t, a_{t+1}, ..., a_{t+H}] 子任务预测 目标定位 轨迹规划 离散动作 连续动作 Subtask Target BBox EEF Trajectory Discrete Action Continuous Action Robot State Instructio n ε ~ N(0, I) ActionExpert (300M) LLM(1.7B) (400M)
DM0首创广义动作解锁复杂任务 机器人的动作不局限在手上,拍照和发送指令一样行 DM0 输出 关节电机动作 提问 全身控制 主动视觉 拍照 函数调用
录音
智能密度最高、落地最实用的具身大模型 更高清 推理延时 二次开发 三路视频下 近实时推理 消费级显卡 便捷开发 输入分辨率 远大于同类模型
224*224 更快速 更轻量 ms 8卡 像素 参数量 更智能 成功率远 高于同类模型
真机评测目前位居榜单全球第一 No.1 Worldwide 过程分 成功率 过程分 成功率 —— Table 30
Generalist多任务 Specialist单任务
DM0:双手协同、精细操作优势明显 毫米级精度 实现高难度任务 双手协同操作 解锁真实世界的复杂任务
开源 DM0 模型和训练代码 及RoboChallenge Table30全部任务的模型和推理代码 代码开源 模型开源
以框架为核心 驱动数据、硬件、测评有价值增长 基础设施
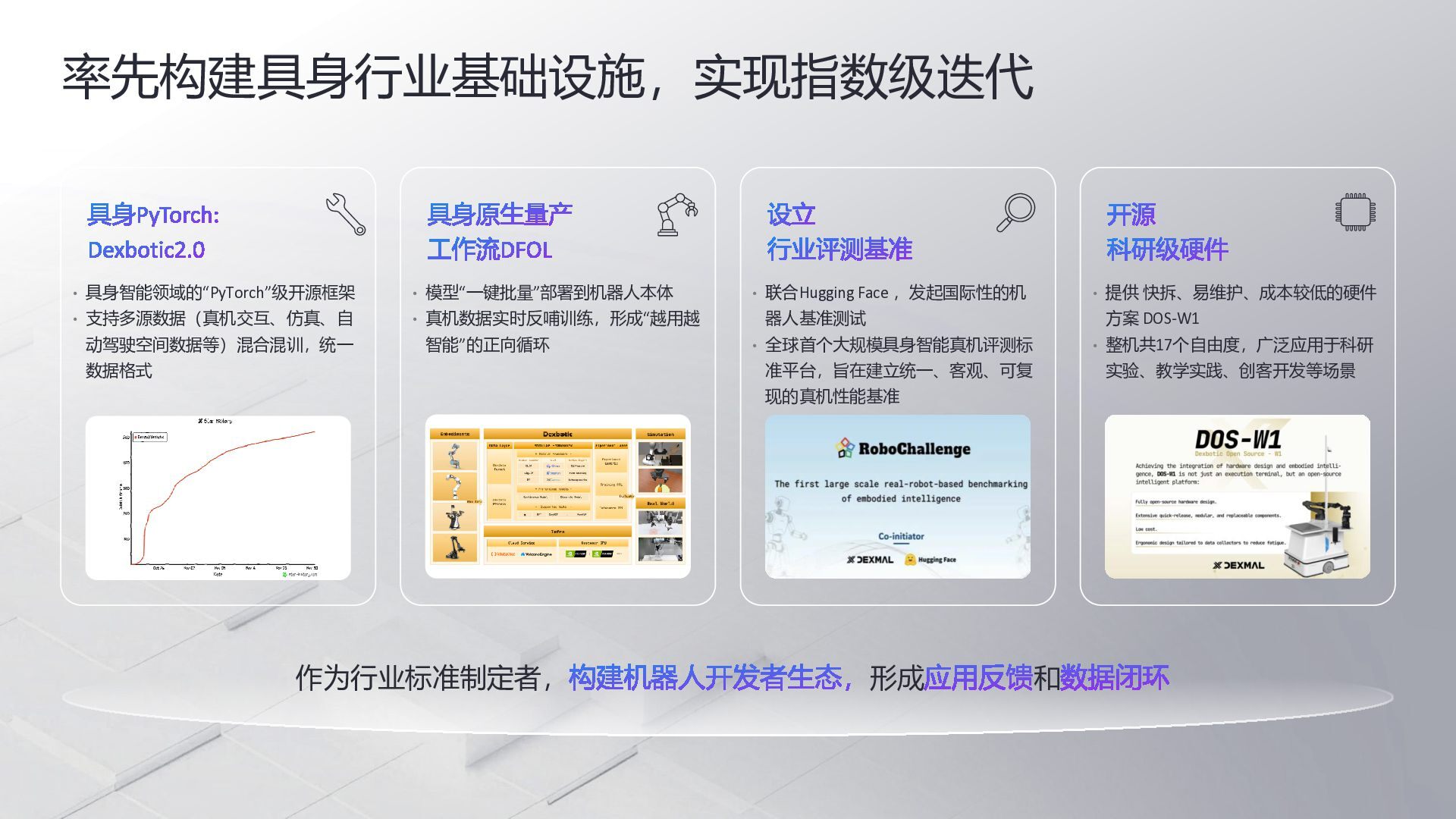
率先构建具身行业基础设施,实现指数级迭代 • 模型“一键批量”部署到机器人本体 • 真机数据实时反哺训练,形成“越用越 智能”的正向循环 • 具身智能领域的“PyTorch”级开源框架 • 支持多源数据(真机交互、仿真、自
动驾驶空间数据等)混合混训,统一 数据格式 • 联合Hugging Face ,发起国际性的机 器人基准测试 • 全球首个大规模具身智能真机评测标 准平台,旨在建立统一、客观、可复 现的真机性能基准 • 提供 快拆、易维护、成本较低的硬件 方案 DOS-W1 • 整机共17个自由度,广泛应用于科研 实验、教学实践、创客开发等场景 作为行业标准制定者, 形成 和
Dexbotic 2.0 五大特性支撑具身原生 模块化架构 统一模仿学习 与强化学习 多源数据训练 统一通用具身 操作与导航 标准化
具身开发全流程 2.0
Dexbotic 已经服务数十家机构、超千名研发者
Dexbotic&Rlinf携手打造具身智能 PyTorch 定位 作用 产出 Evolution 大模型 RL 后训练 利用强化学习进行深度攻坚
高成功率的 VLA 最终策略 Foundation VLA预训练+有监督微调 利用海量数据进行广度覆盖 通用常识的VLA初始策略
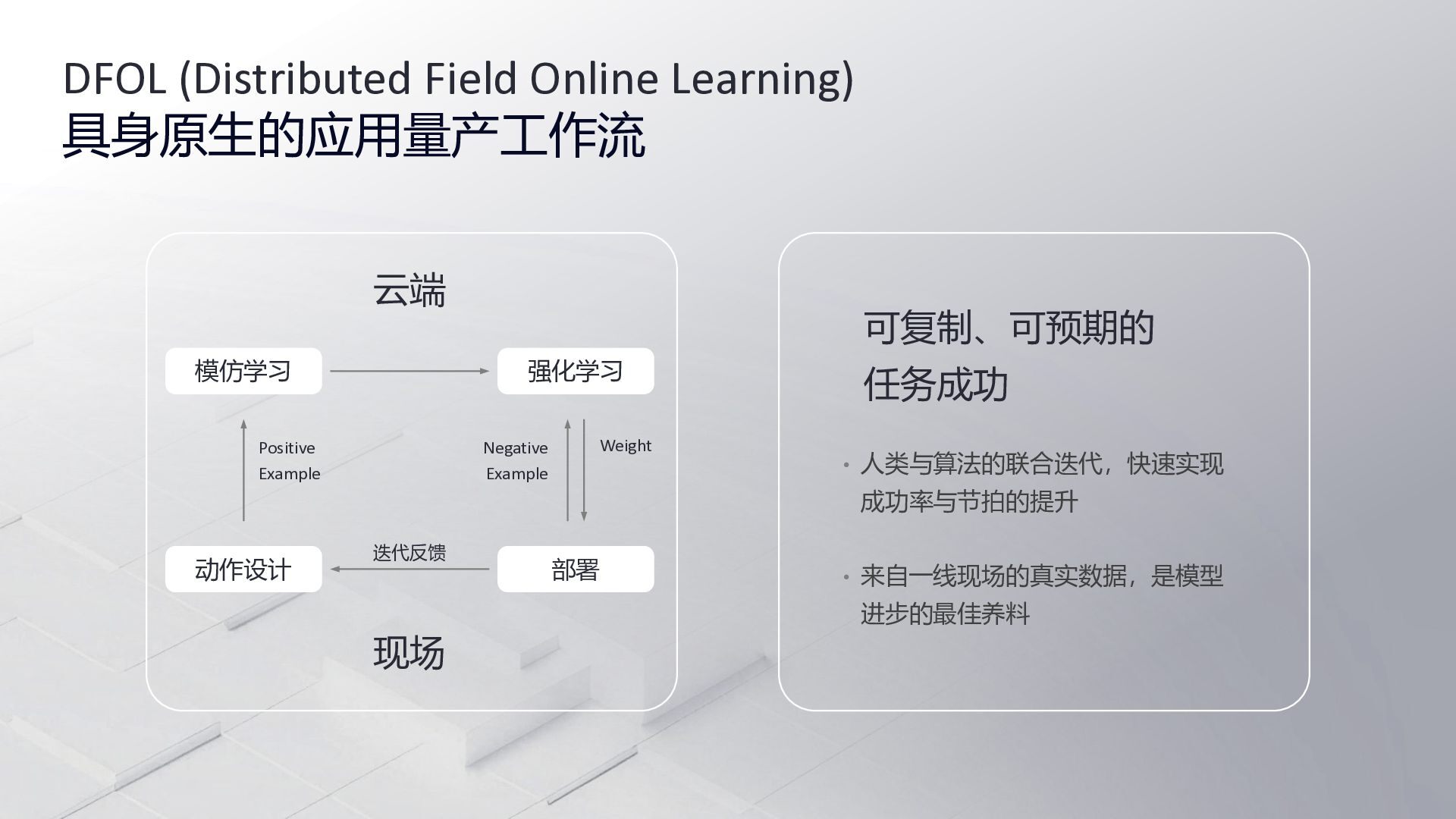
DFOL (Distributed Field Online Learning) 具身原生的应用量产工作流 Positive Example Negative Example
Weight 云端 现场 模仿学习 强化学习 动作设计 迭代反馈 部署 可复制、可预期的 任务成功 • 人类与算法的联合迭代,快速实现 成功率与节拍的提升 • 来自一线现场的真实数据,是模型 进步的最佳养料
硬件支持:Dexbotic支持行业主流硬件开发 10+ Embodiments LeRobot SO- 101 Dexmal DOS- W1 Galaxea
R1 UR Franka WidowX ALOHA ARX UMI Realman
全球首个具身智能的大规模真机评测平台 Co-initiator : 模型评测榜单 Table30 Benchmark
RoboChallenge全球最大规模的真机测评 桌面场景 原子任务 25.09 多任务泛化 一个模型多任务 26.03 商业真实场景 长程与精细化操作 26.08
开源所有硬件BOM +自组零件三维图纸& CMF +所选市售成熟产品选型及资料 开源所有软件代码和 sdk 涵盖数据采集+模型训练 +模型部署的全流程 开源轮式双臂机器人实验平台 自研开源硬件DOS-W1
灵活的模块化设计, 上位机、机械臂、相机等 组件快拆快换; 易维护、支持 DIY
人机混合模式 机器人平滑进入场景,形成最快数据飞轮 场景应用
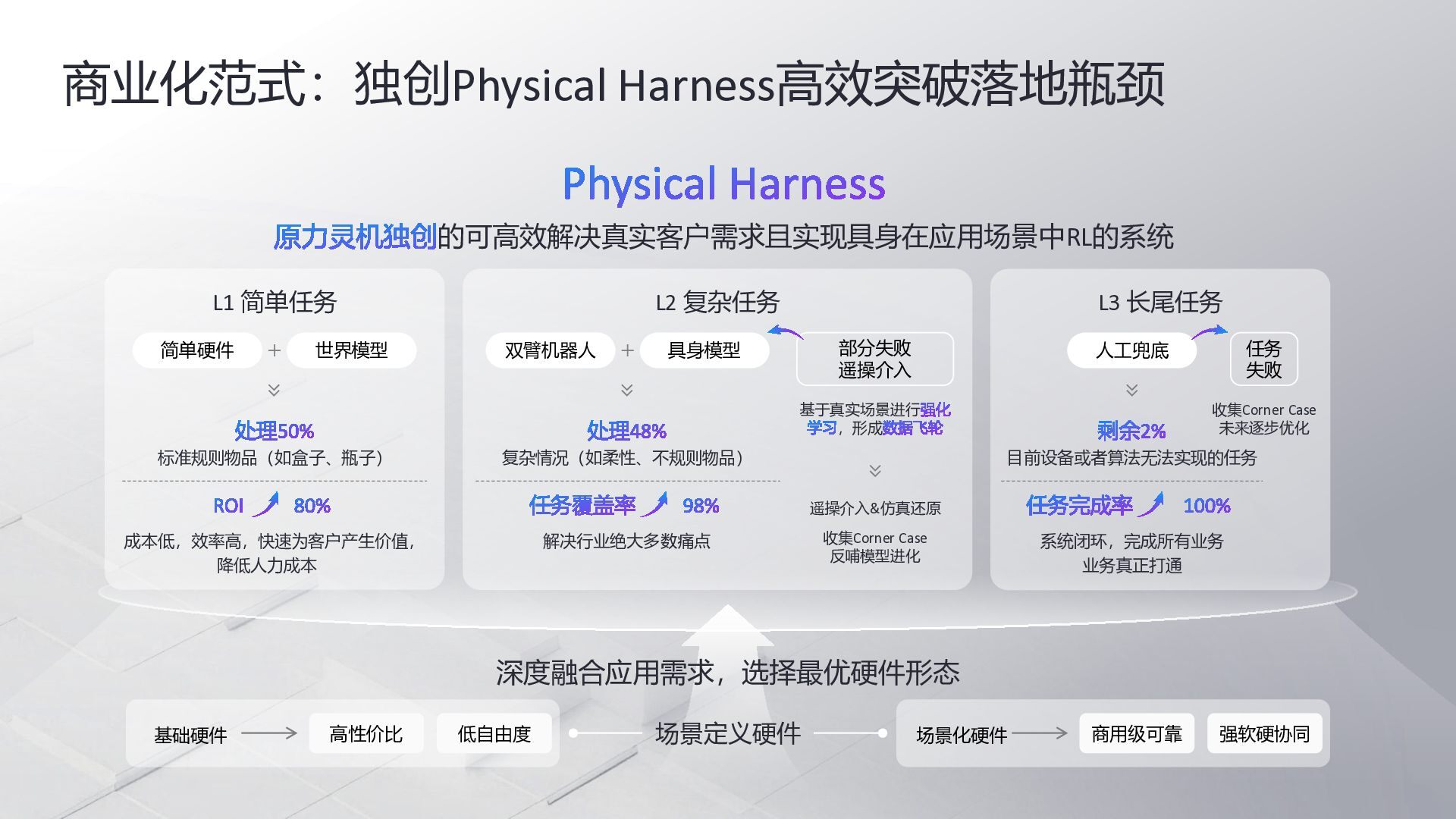
商业化范式:独创Physical Harness高效突破落地瓶颈 的可高效解决真实客户需求且实现具身在应用场景中RL的系统 L1 简单任务 标准规则物品(如盒子、瓶子) 简单硬件 世界模型 成本低,效率高,快速为客户产生价值, 降低人力成本
L2 复杂任务 双臂机器人 具身模型 复杂情况(如柔性、不规则物品) 部分失败 遥操介入 解决行业绝大多数痛点 基于真实场景进行 ,形成 遥操介入&仿真还原 收集Corner Case 反哺模型进化 人工兜底 目前设备或者算法无法实现的任务 L3 长尾任务 系统闭环,完成所有业务 业务真正打通 任务 失败 收集Corner Case 未来逐步优化 深度融合应用需求,选择最优硬件形态 基础硬件 高性价比 低自由度 场景化硬件 商用级可靠 强软硬协同 场景定义硬件
行业落地 率先落地物流场景,是具身智能可最快应用落地的行业 错误容忍 具备内置的恢复机制或人工兜底方案, 单一错误不会导致全流程崩溃 适度泛化 操作任务可满足适度的泛化要求 时间容忍 对实时性无严苛要求,允许延迟执行和 进行二次尝试
长时作业 长时运行摊低成本,ROI 更高
行业落地 从物流快速延伸到其他工业场景,最终落地家庭 底层模型复用,优先落地家庭部分任务 在多元场景下不断提升任务成功率和泛化性 为其他场景横向扩展提供商业化范本 零售 轻工 …… 收纳 整理
家庭助手 避障 规划 分类 抓取 识别
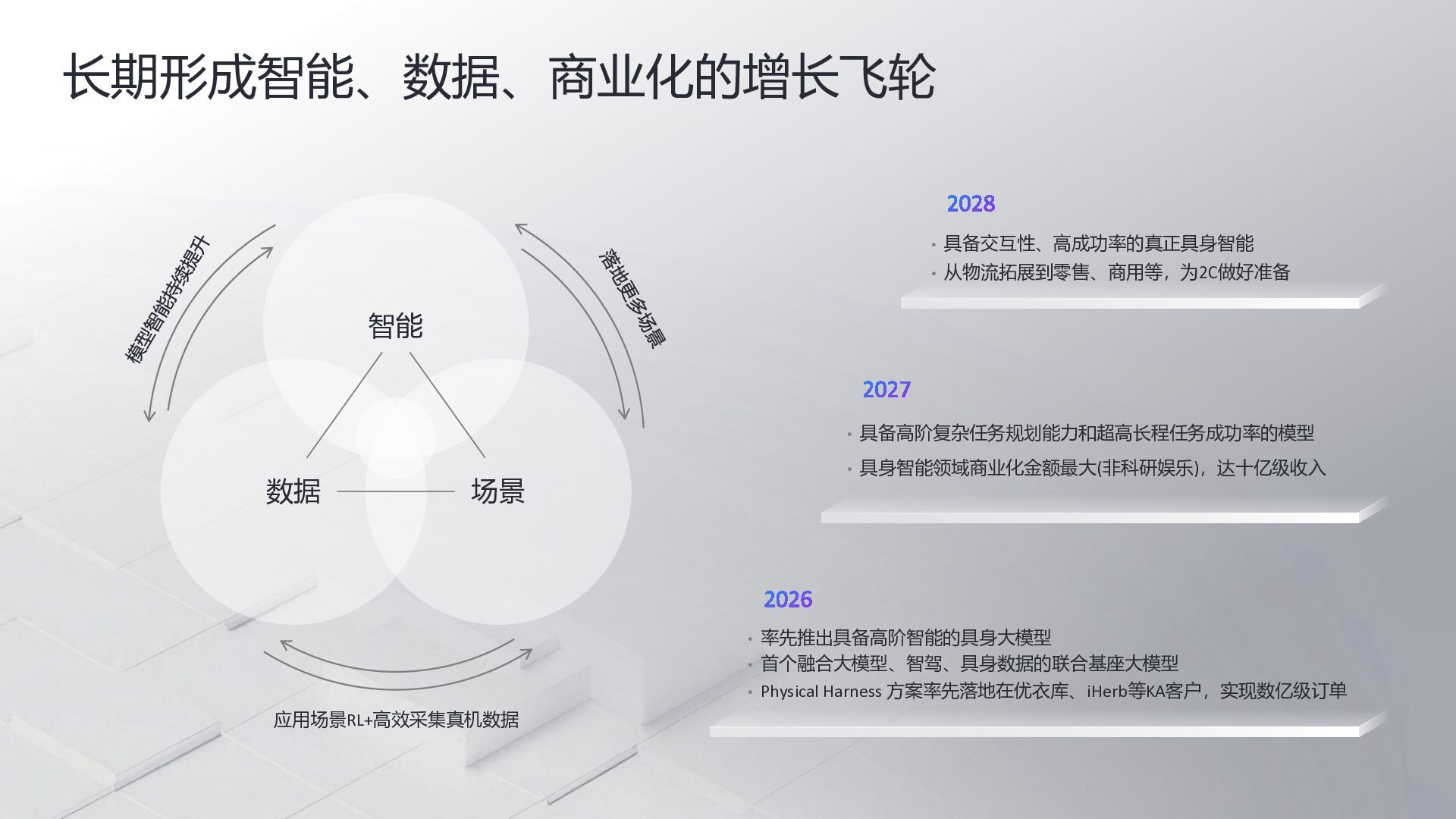
长期形成智能、数据、商业化的增长飞轮 智能 数据 场景 应用场景RL+高效采集真机数据 • 率先推出具备高阶智能的具身大模型 • 首个融合大模型、智驾、具身数据的联合基座大模型 •
Physical Harness 方案率先落地在优衣库、iHerb等KA客户,实现数亿级订单 • 具备高阶复杂任务规划能力和超高长程任务成功率的模型 • 具身智能领域商业化金额最大(非科研娱乐),达十亿级收入 • 具备交互性、高成功率的真正具身智能 • 从物流拓展到零售、商用等,为2C做好准备
携手Dexmal原力灵机 共创具身智能新时代 官方网站:https://dexmal.com 商业合作:
[email protected]
媒体联系:
[email protected]
招聘咨询:
[email protected]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![携手Dexmal原力灵机 共创具身智能新时代 官方网站:https://dexmal.com 商业合作:[email protected] 媒体联系:[email protected] 招聘咨询:[email protected]](https://files.speakerdeck.com/presentations/d759e4ee2c404ad8bd81fa51e0356fea/slide_40.jpg){kind=link}