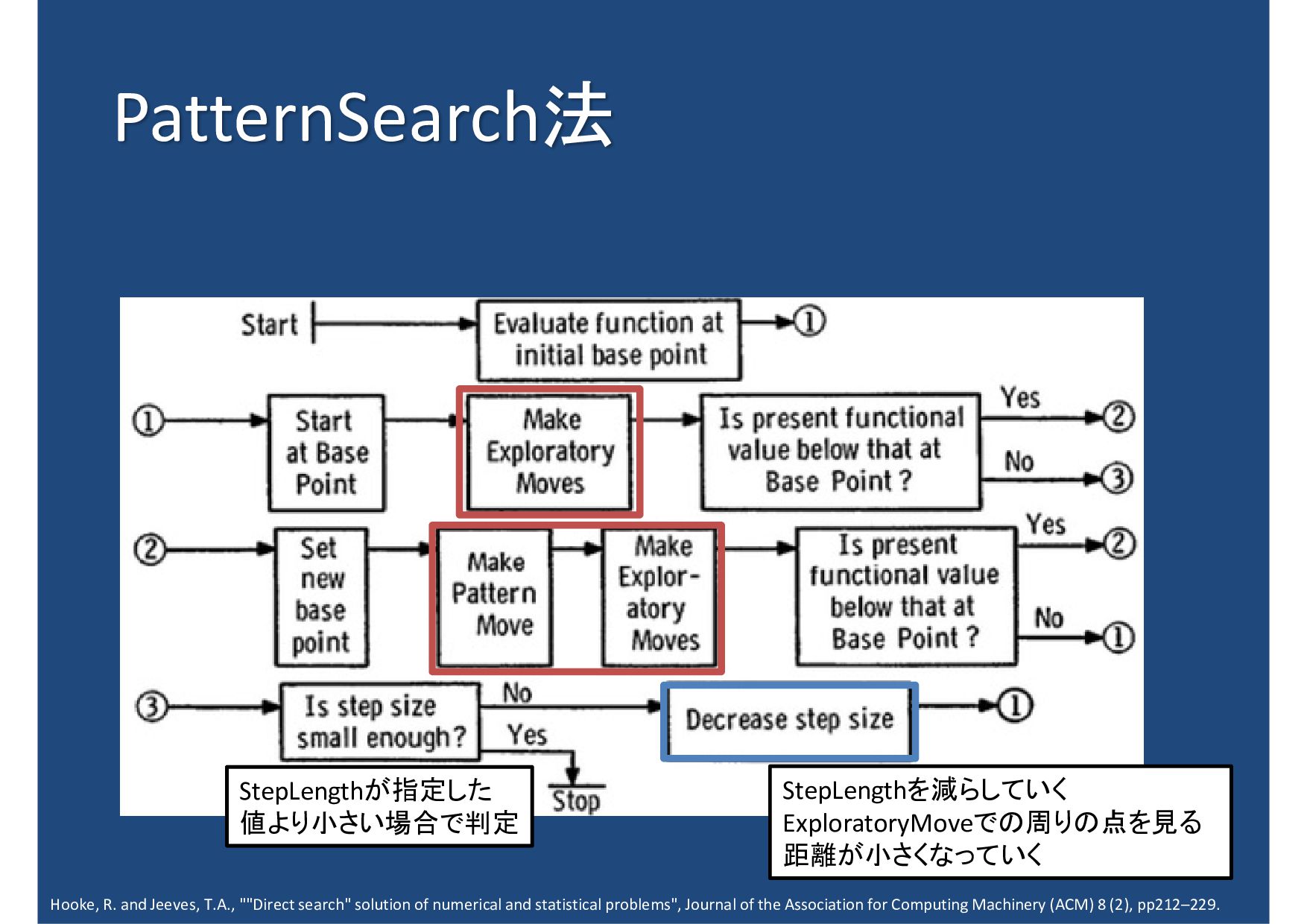
共立出版株式会社, 2007年初版第7刷 3. オペレーションズリサーチ学会, “ORを探せ!”ポスターより(http://www.orsj.or.jp/members/poster.html) 4. 電気学会. "遺伝アルゴリズムとニューラルネット." コロナ社, 1999. 5. Ono, Isao, Shigenobu Kobayashi, and Koji Yoshida. "Optimal lens design by real-coded genetic algorithms using UNDX." Computer methods in applied mechanics and engineering 186.2-4 (2000): 483-497. 6. 大林茂. "進化計算と工学設計." 進化計算学会論文誌 1.1 (2011): 8-9. 7. Wolpert, David H., and William G. Macready. "No free lunch theorems for optimization." IEEE transactions on evolutionary computation 1.1 (1997): 67-82. 8. 編集人 亀井哲治郎, 発行人 大石進, “数学セミナー”, 日本評論社, 1985年8月号 9. サポートベクターマシン: https://ja.wikipedia.org/wiki/%E3%82%B5%E3%83%9D%E3%83%BC%E3%83%88%E3%83%99%E3%82%AF%E3%82%BF%E3%83%BC%E3%83%9E%E3%82%B7%E3%83%B3 10. 逐次最小問題最適化法: https://ja.wikipedia.org/wiki/%E9%80%90%E6%AC%A1%E6%9C%80%E5%B0%8F%E5%95%8F%E9%A1%8C%E6%9C%80%E9%81%A9%E5%8C%96%E6%B3%95 11. K. Hoki and T. Kaneko, "Large-Scale Optimization for Evaluation Functions with Minimax Search", Journal of Artificial Intelligence Research (JAIR), 2014, Volume 49, pages 527-568 12. 組合せ最適化でチーム分けする(平均偏差最小化):https://qiita.com/matsulib/items/898873b73d584c7dcb8b 13. 小林 一郎. “人工知能の基礎.” サイエンス社, 2008. 14. 荒屋 真二. ”人工知能概論 第2版 ―コンピュータ知能からWeb知能まで.”共立出版, 2004 15. 進化的計算:https://ja.wikipedia.org/wiki/%E9%80%B2%E5%8C%96%E7%9A%84%E8%A8%88%E7%AE%97 16. Valdez, Fevrier, Patricia Melin, and Oscar Castillo. "A survey on nature-inspired optimization algorithms with fuzzy logic for dynamic parameter adaptation." Expert systems with applications 41.14 (2014): 6459-6466. 17. Fister Jr, Iztok, et al. "A brief review of nature-inspired algorithms for optimization." arXiv preprint arXiv:1307.4186 (2013). 18. Bhuvaneswari, M., et al. "Nature Inspired Algorithms: A Review." International Journal of Emerging Technology in Computer Science and Electronics 12.1 (2014): 21-28. 19. 自然選択説:https://ja.wikipedia.org/wiki/%E8%87%AA%E7%84%B6%E9%81%B8%E6%8A%9E%E8%AA%AC 20. 樋口 隆英, 筒井 茂義, 山村 雅幸, "実数値GAにおけるシンプレクス交叉", 人工知能学会論文誌Vol. 16 (2001) No. 1 pp.147-155 21. Amari, Shun-Ichi. "Natural gradient works efficiently in learning." Neural computation 10.2 (1998): 251-276. 22. Akimoto, Youhei, et al. "Bidirectional relation between CMA evolution strategies and natural evolution strategies." International Conference on Parallel Problem Solving from Nature. Springer, Berlin, Heidelberg, 2010. 23. James Martens. New insights and perspectives on the natural gradient method. https://arxiv.org/abs/1412.1193 v9 24. Arnold, L., A. Auger, N. Hansen, Y. Ollivier (2011). Information-Geometric Optimization Algorithms: A Unifying Picture via Invariance Principles, technical report on HAL: hal-00601503 25. 小林重信. "実数値 GA のフロンティア." 人工知能学会論文誌 24.1 (2009): 147-162. 26. Hooke, R. and Jeeves, T.A., ""Direct search" solution of numerical and statistical problems", Journal of the Association for Computing Machinery (ACM) 8 (2), pp212–229. 27. J.A.Nelder and R.Mead, "A simplex method for function minimization" ,The Computer Journal vol.7, 308–313 (1965)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
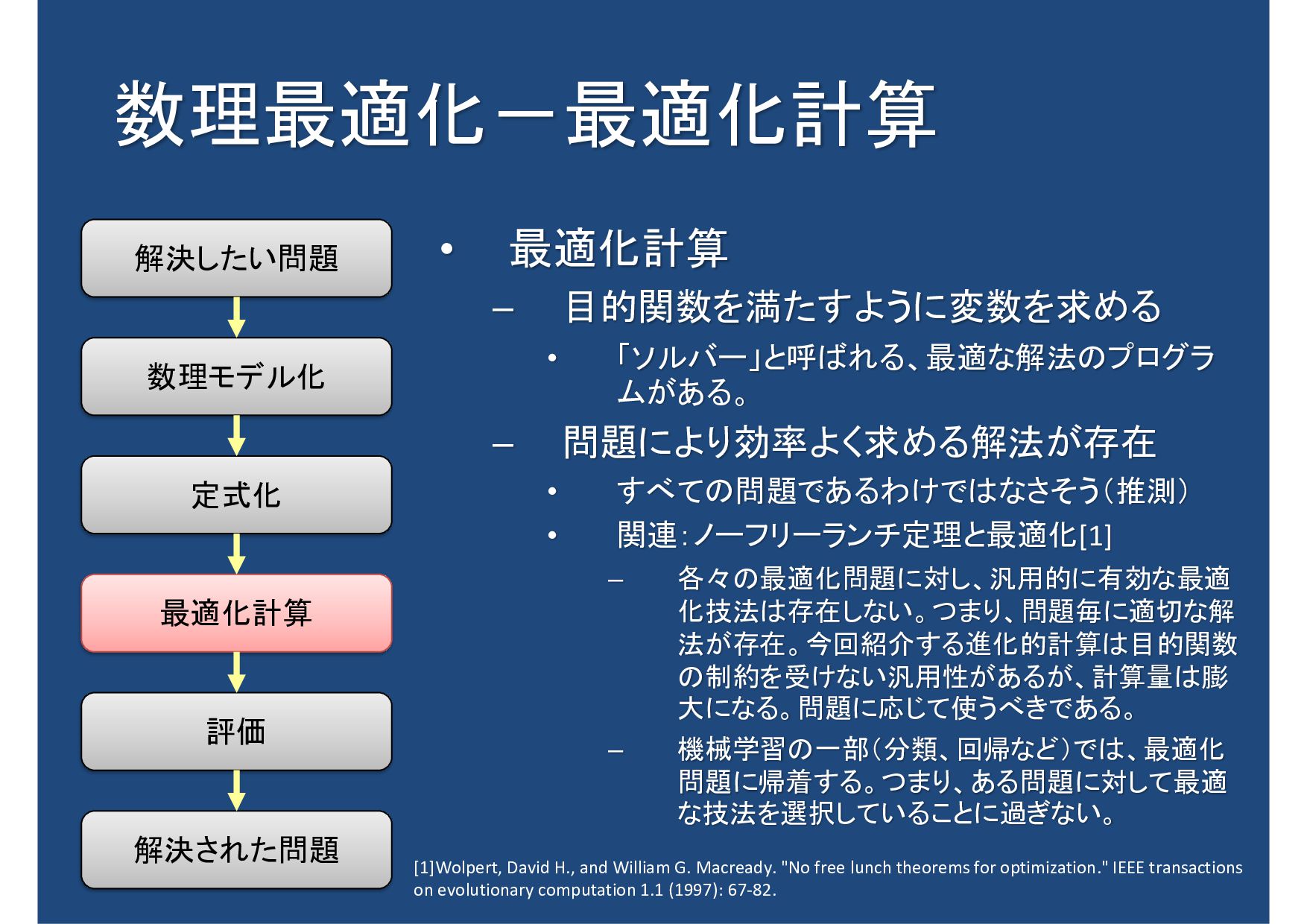
{kind=link}
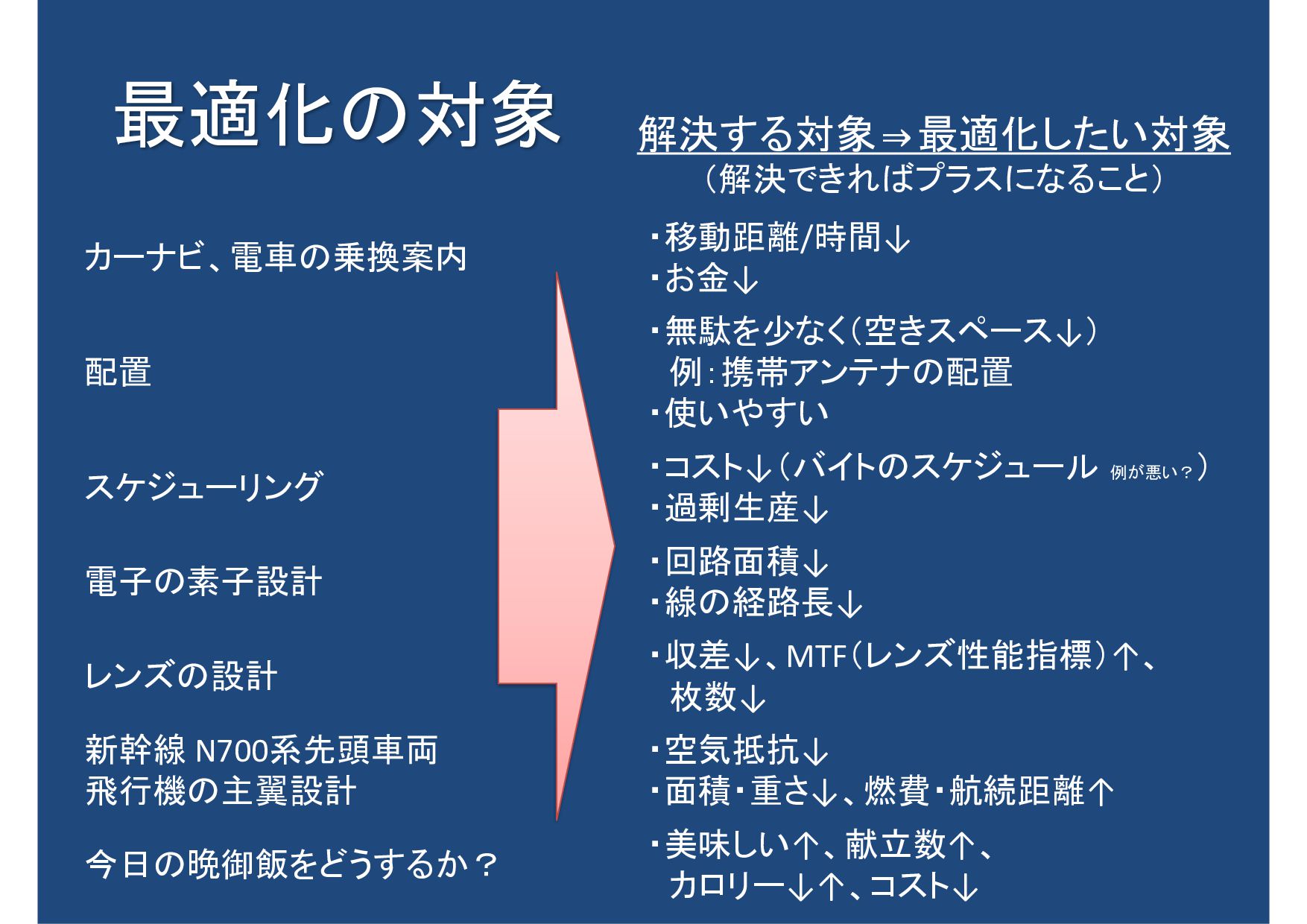
![最適化の具体例 • 身近にある“最適化”によってもたらされたコト・モノ – カーナビ、電車の乗換案内[1] – 配置[1] – スケジューリング(生産、バイトのシフトなど)[1] –](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_7.jpg){kind=link}
{kind=link}
![最適化の定義 • 定義 – “与えられた条件のもとで複数の選択肢の中から何らかの 意味で最善なものを選択するのが最適化”[1] – “与えられた制約条件のもとで関数の値を最大または最小 にする変数の値を求めることを最適化と呼ぶ。”[2] [1]穴井宏和.](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_9.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
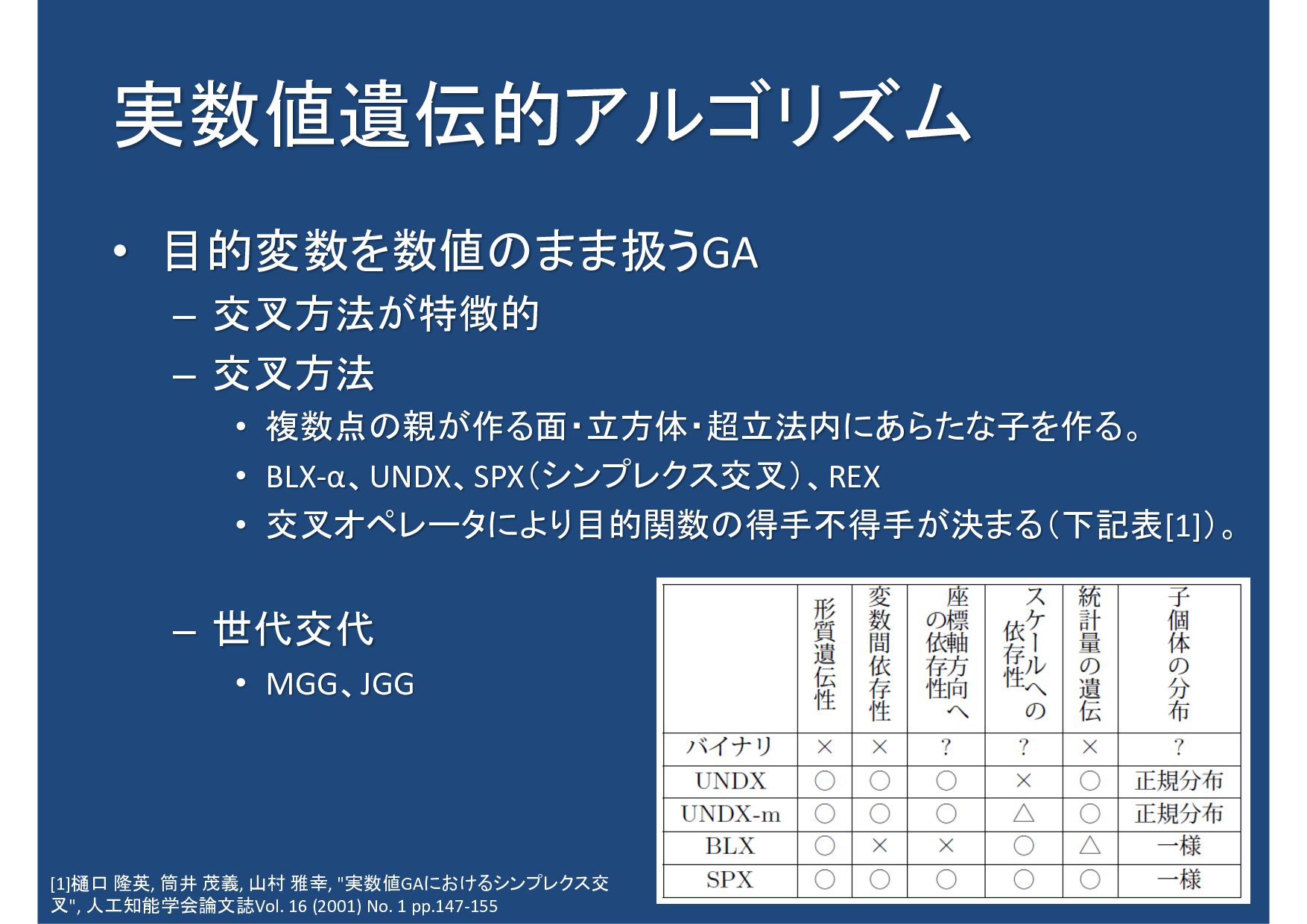
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
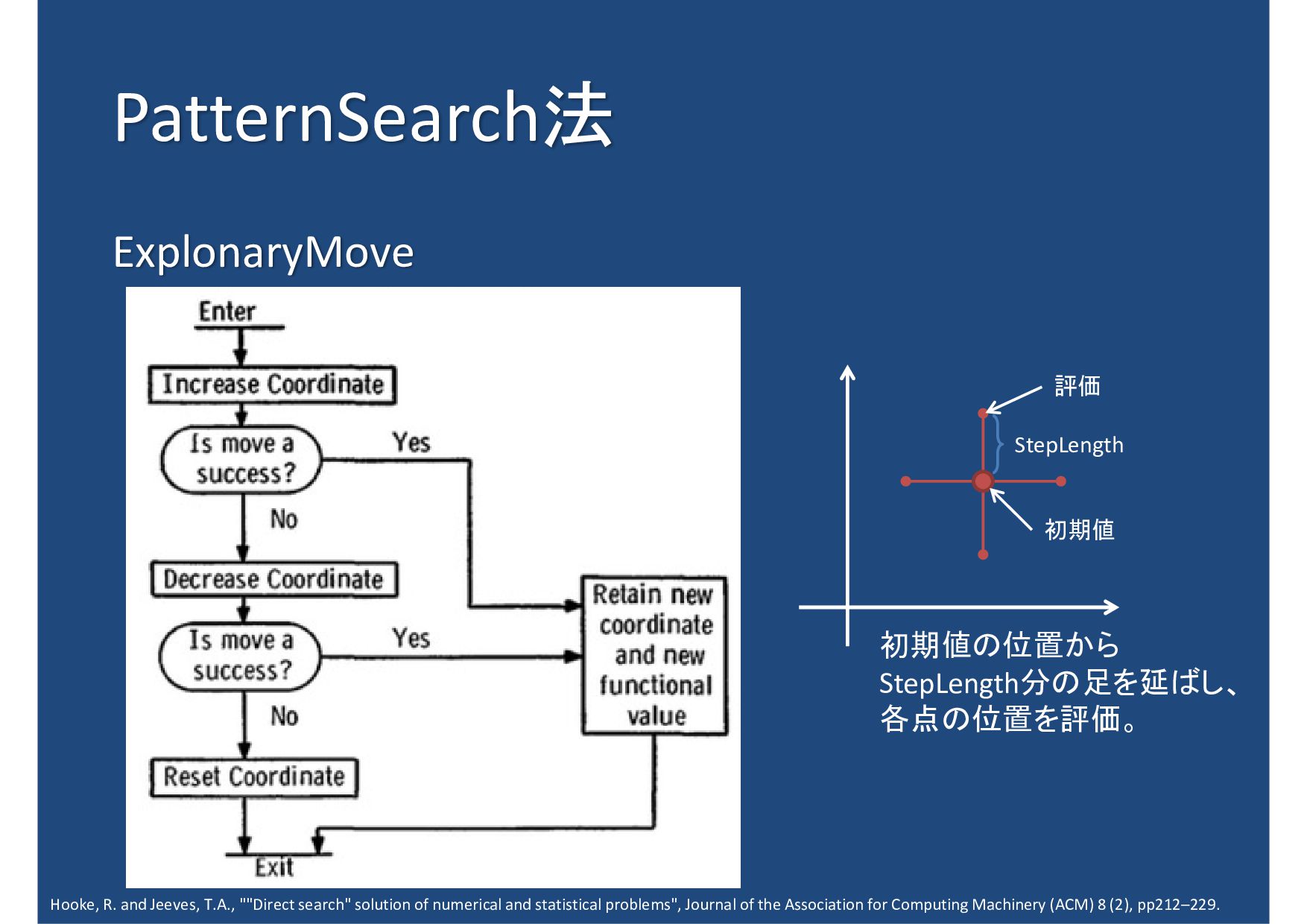
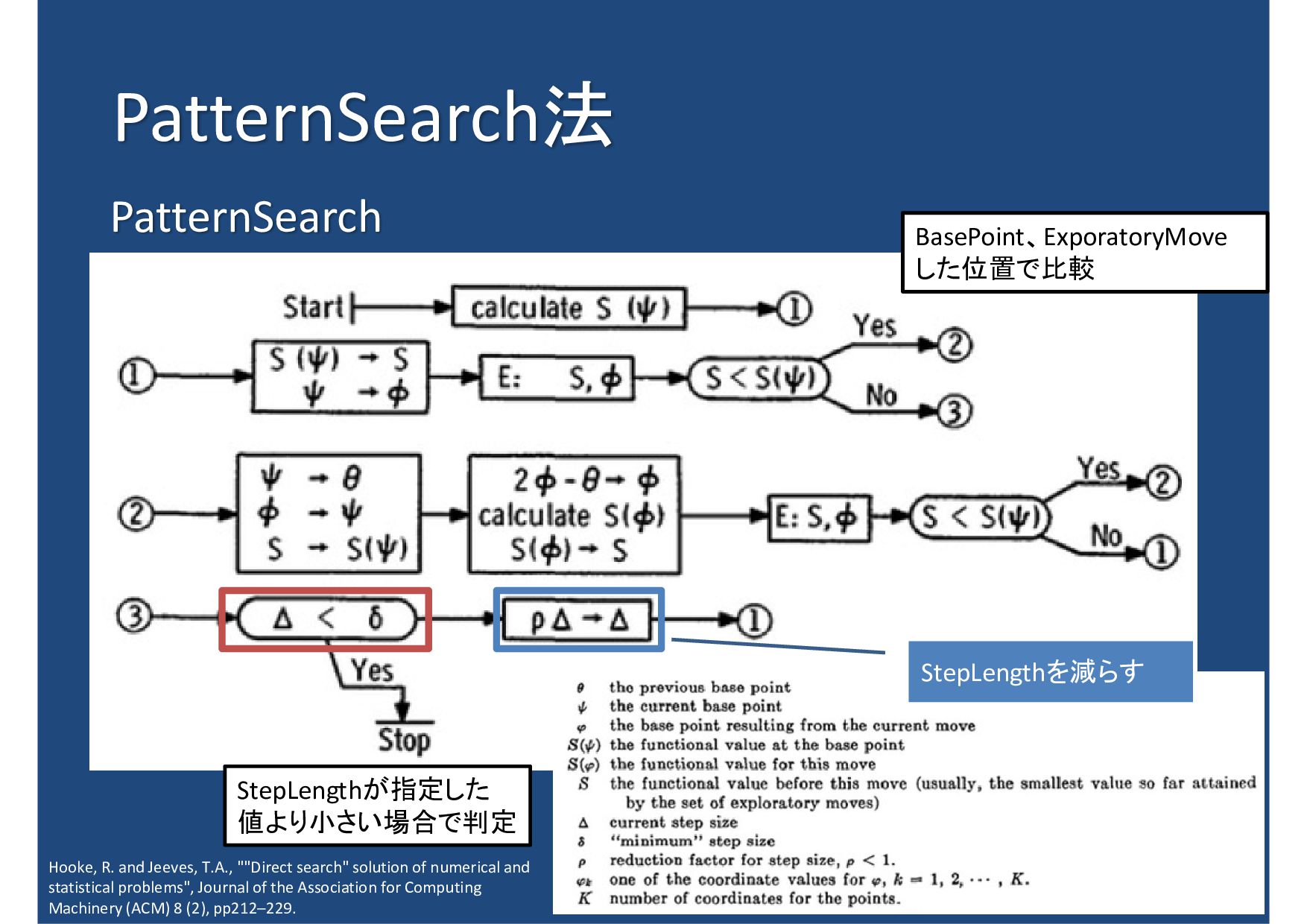
{kind=link}
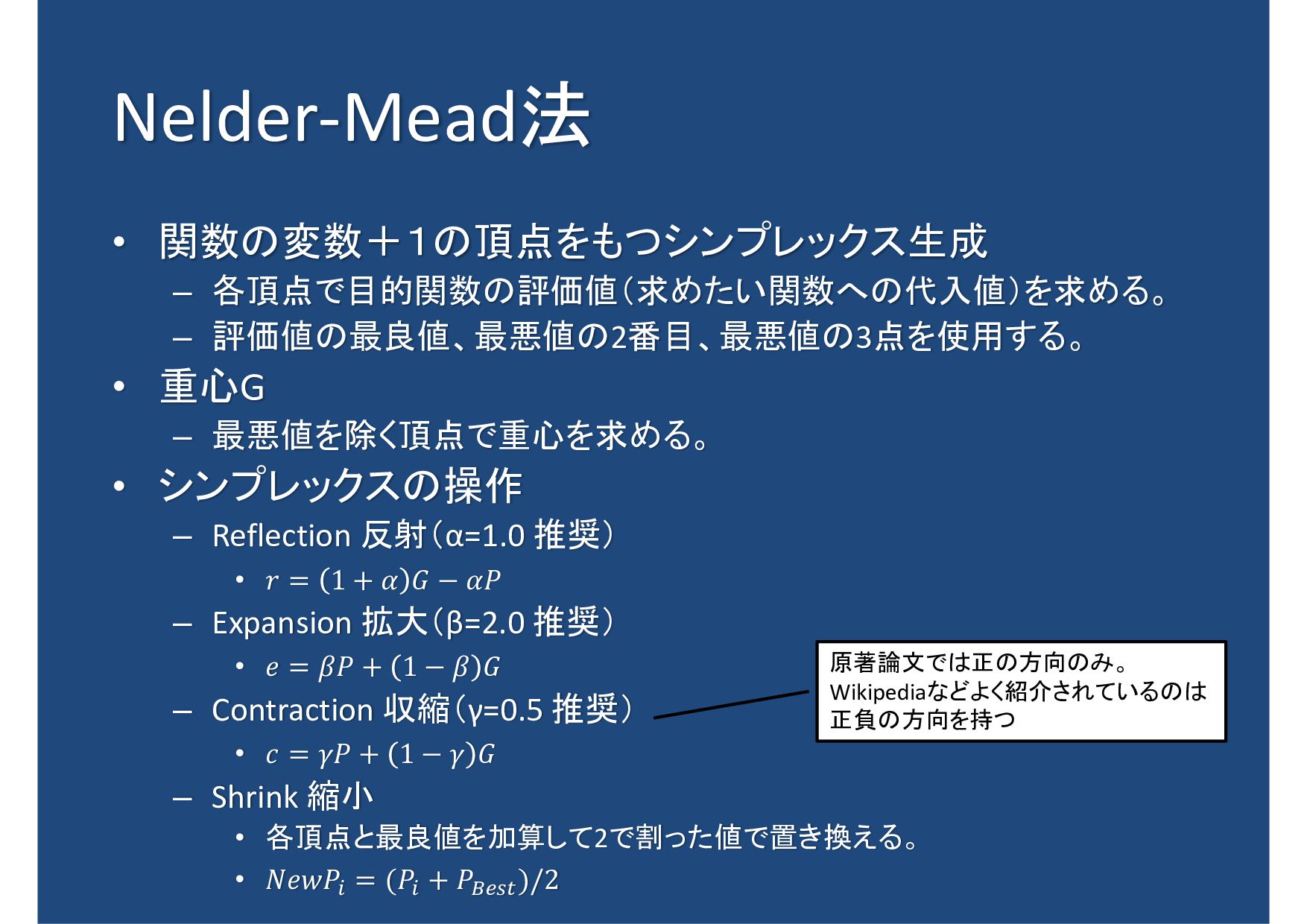
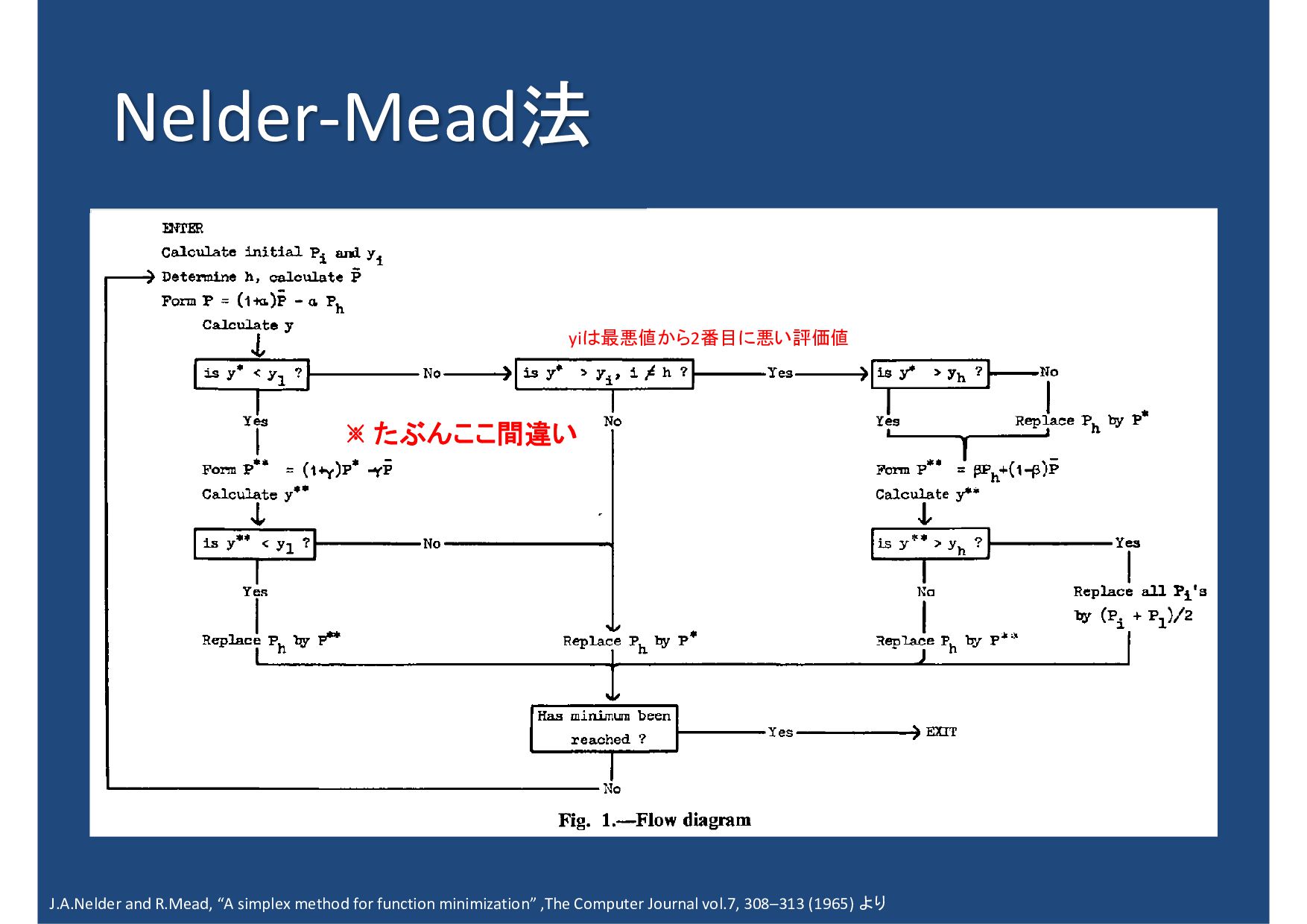
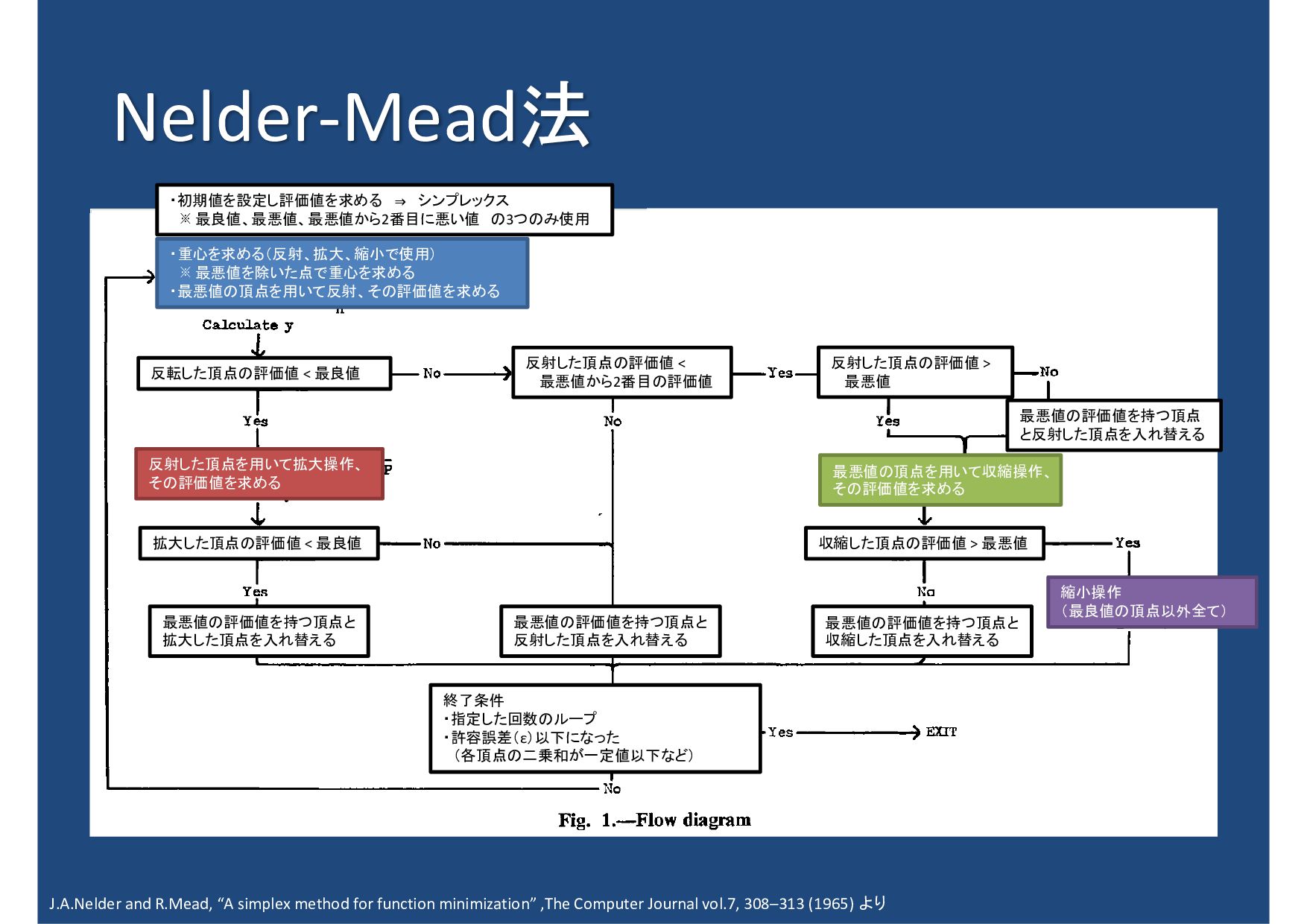
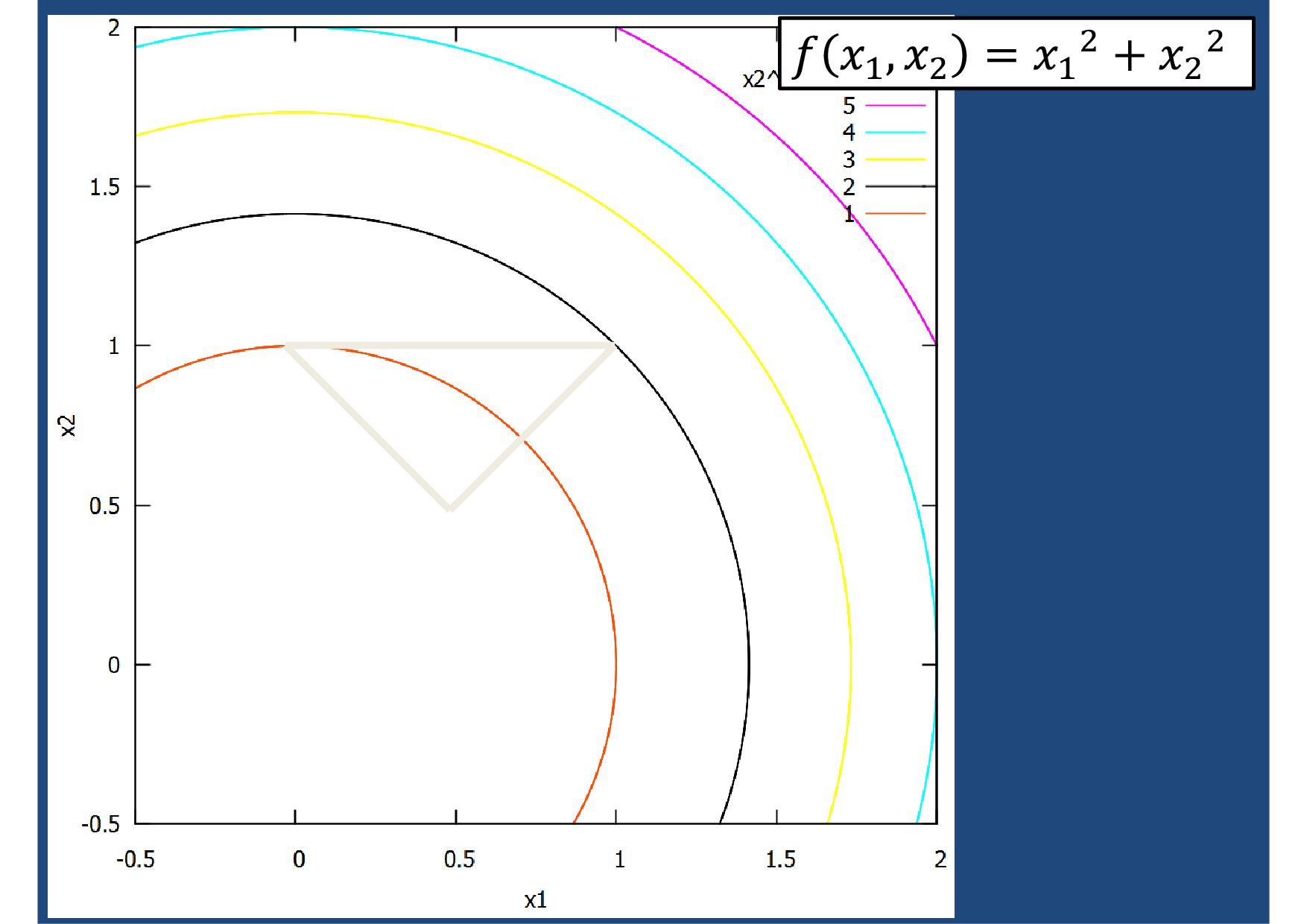
{kind=link}
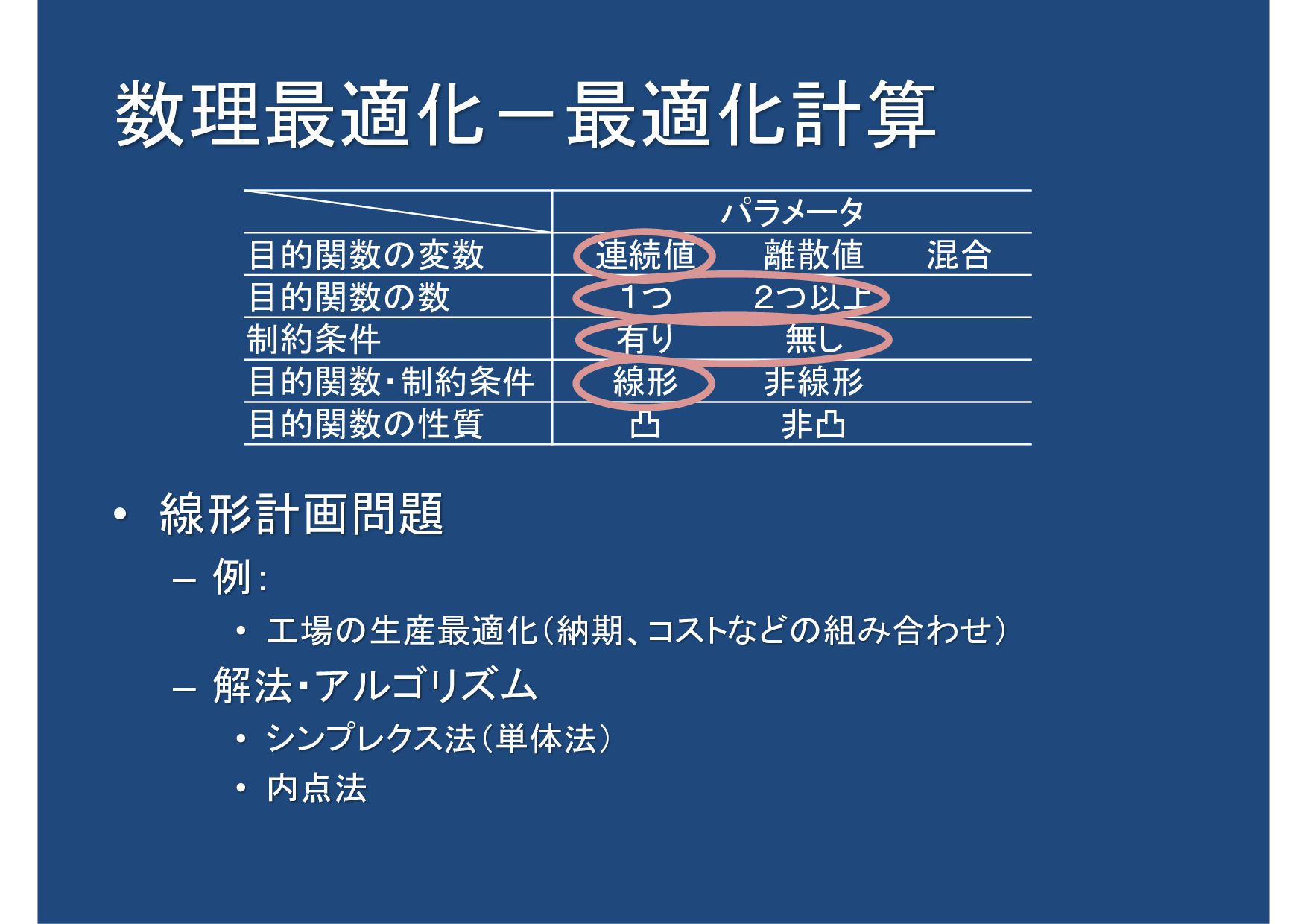
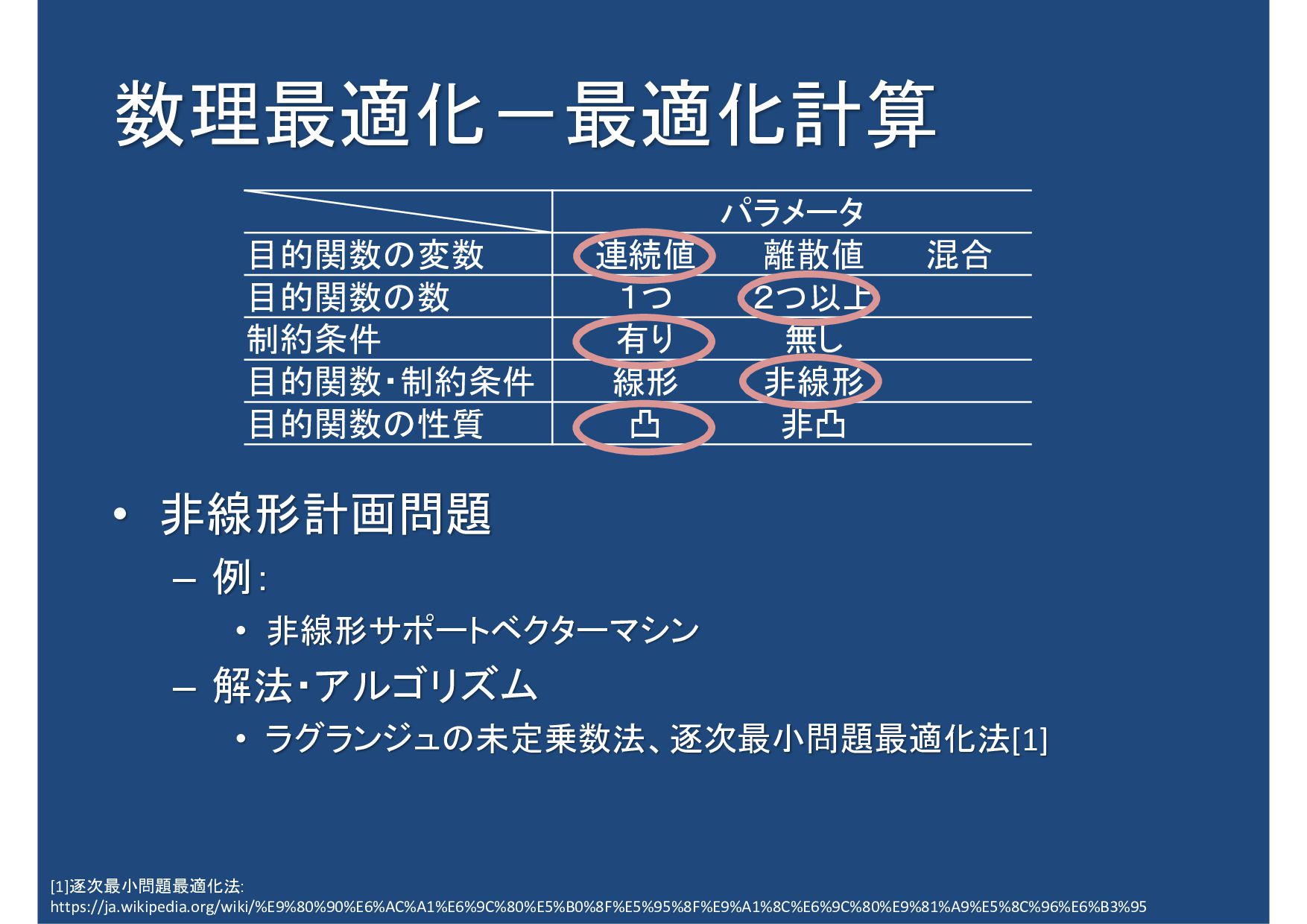
![数理最適化-最適化計算 • 線形計画問題 – 例: • 線形サポートベクターマシン[1] (機械学習での分類の技法、線形識別関数を求める技法のひとつ) – 解法・アルゴリズム](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_27.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![目的関数が非線形、非凸 • 目的関数がとりうる形状で、最適化の困難さ ([1]より図を引用) • 目的関数が不連続or微分不可 • 目的関数に谷が複数存在(多峰性˱単峰性) [1]K. Hoki](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_32.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![進化的計算とは? • 定義 – “環境に適応して進化する生物のダイナミックスを模倣し、計算機 処理のアルゴリズムに取り入れようとする進化的計算”[1] – “生物の進化の過程を模倣することにより、環境によりよく適応す るための知識や機能をコンピュータが自動的に獲得できるように することが進化的計算の目標”[2]](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_38.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
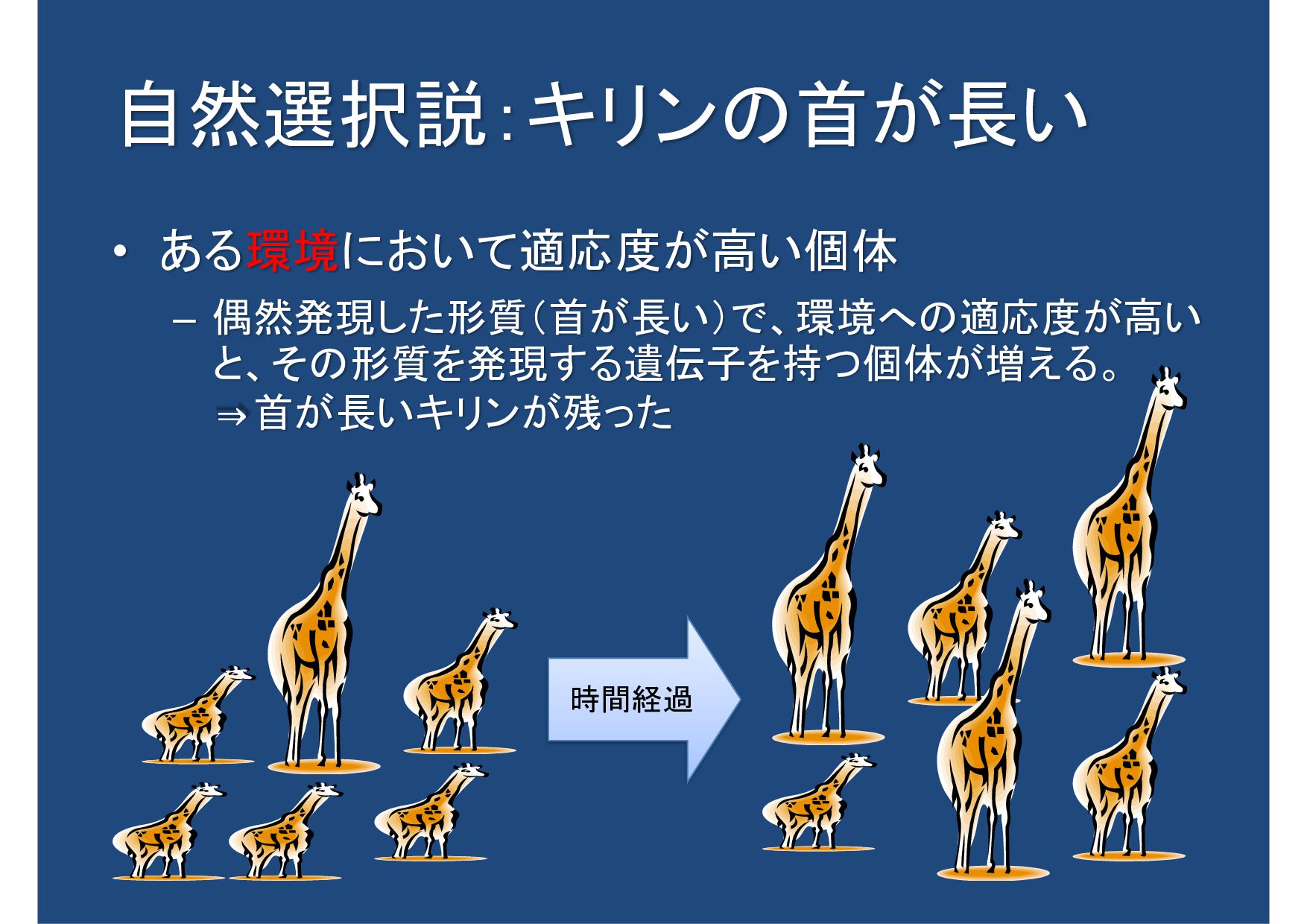
![遺伝的アルゴリズム(GA) • 概要 – Goldbergが1989年に提唱 – 自然選択説[1]をベースにしたアルゴリズム • 下記の3条件を満たす時、伝達的性質が累積的に変化 –](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_51.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![実数値遺伝的アルゴリズム • シンプレクス交叉[1] – 変数数+1の親を選択、一定の拡張をした空間で子を生成 – 下の図の灰色になっている空間に子が生成される[1] [1]樋口 隆英, 筒井](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_60.jpg){kind=link}
{kind=link}
{kind=link}
![進化的計算 • 変数が多い(=高次元になると)と収束しなくなる。 • ESの一種である「CMA-ES(共分散行列適応進化戦 略)」は自然勾配法[1]と関連[2] – 自然勾配法(Natural Gradiend Descent)は、勾配法の一種。](https://files.speakerdeck.com/presentations/1145e9b734e642bbb4deddb61f982451/slide_63.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}