Share
ArduinoとPCの間で通信を行う方法についてまとめた資料です。LチカからPCとArduinoで通信を行う簡単な方法を説明しています。 Part1はコチラ(https://speakerdeck.com/tomit3/ltikadezhong-warasenaiarduino-siriarutong-xin-part1)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
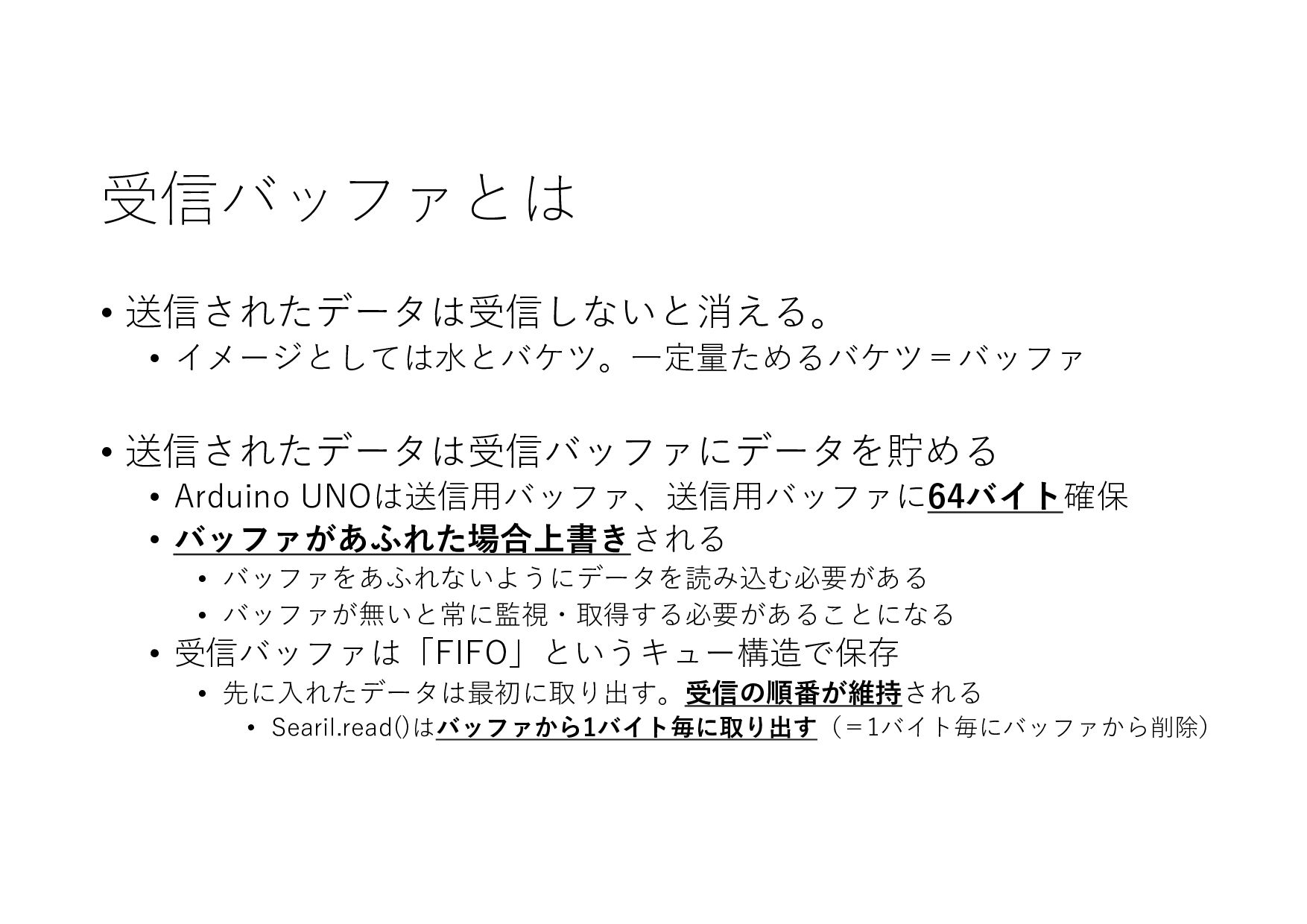
![LF 0x31 1[送信] 受信バッファ FIFO(First In First Out) 先入れ先出し ↑](https://files.speakerdeck.com/presentations/0b99988e3c324ea4b42556c7f9adcf8b/slide_13.jpg){kind=link}
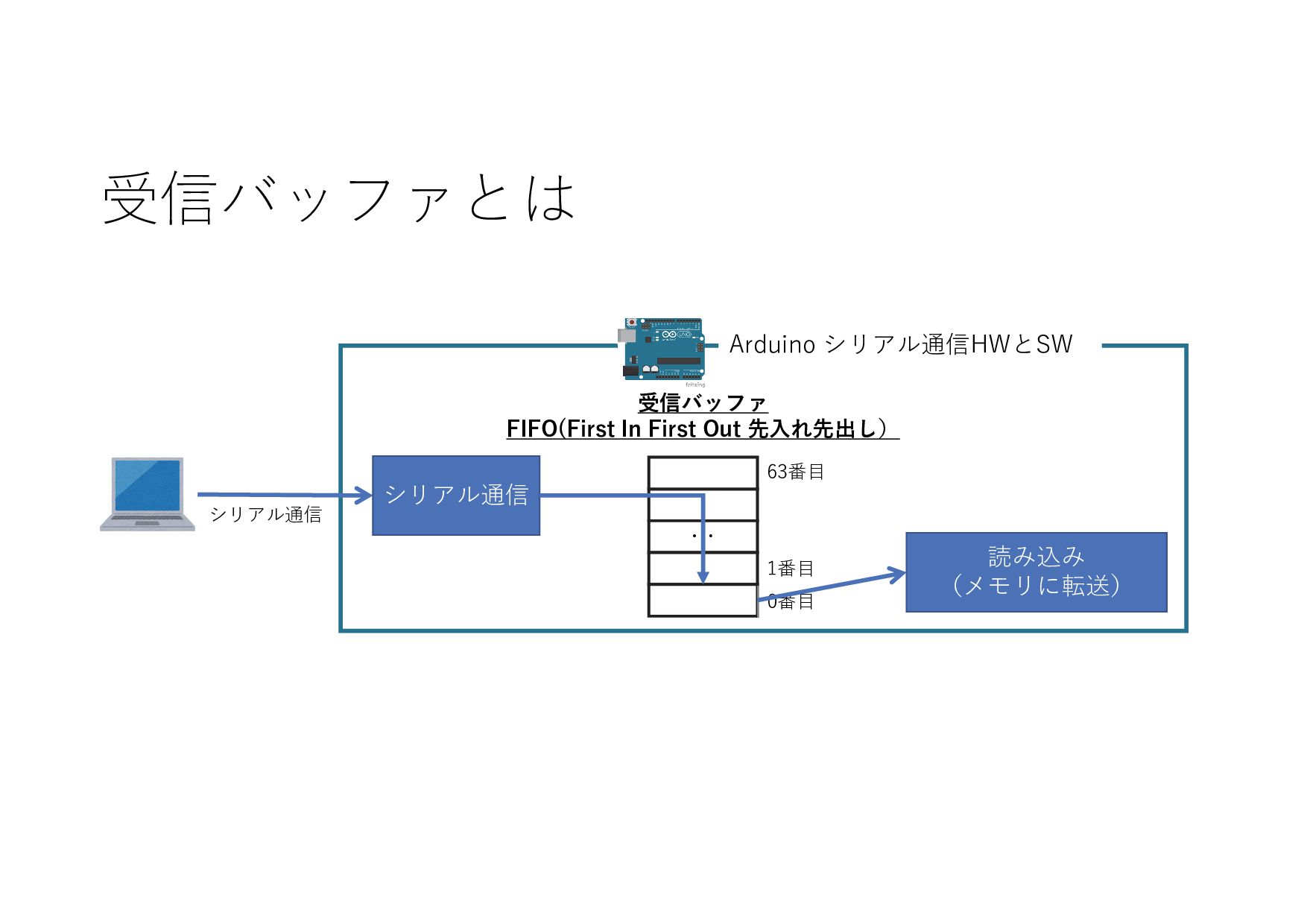
![受信バッファとFIFO • 「12」を送信すると LF 0x32 0x31 0番目 1番目 63番目 12[送信]](https://files.speakerdeck.com/presentations/0b99988e3c324ea4b42556c7f9adcf8b/slide_14.jpg){kind=link}
![LF 0x32 0x31 0番目 1番目 63番目 12[送信] 受信バッファ FIFO(First In](https://files.speakerdeck.com/presentations/0b99988e3c324ea4b42556c7f9adcf8b/slide_15.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
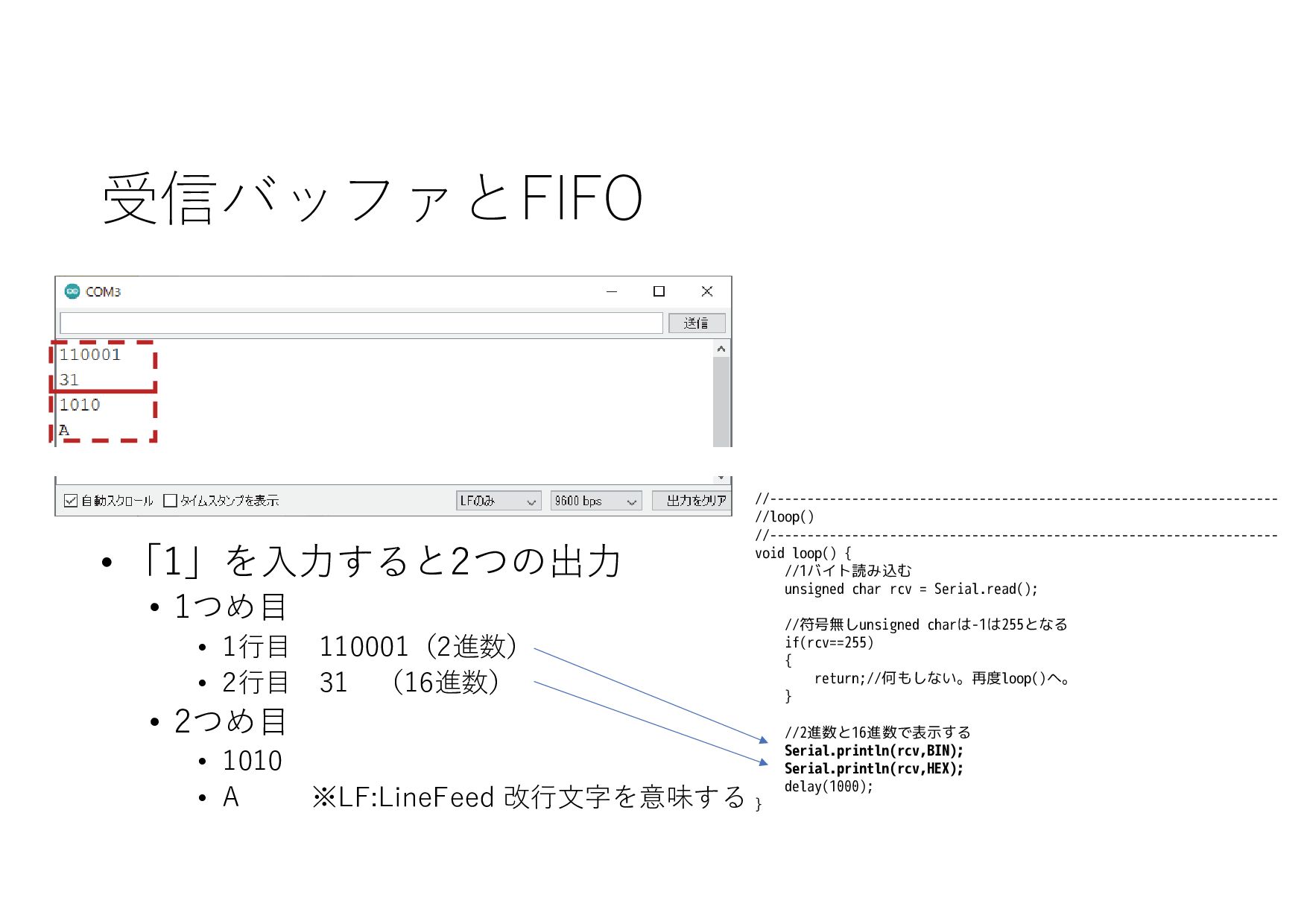
![効率よく送る(データ構造) • 例:「15」を送る。受信側は数字として扱う。 • 文字で送る(シリアルモニタはこちら) • 文字を送ることになる「1」と「5」の2バイト • [0x31][0x35]を送る=1バイトを2回送信 •](https://files.speakerdeck.com/presentations/0b99988e3c324ea4b42556c7f9adcf8b/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
![0x32 0x31 0番目 1番目 63番目 12[送信] 受信バッファ FIFO(First In First](https://files.speakerdeck.com/presentations/0b99988e3c324ea4b42556c7f9adcf8b/slide_23.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
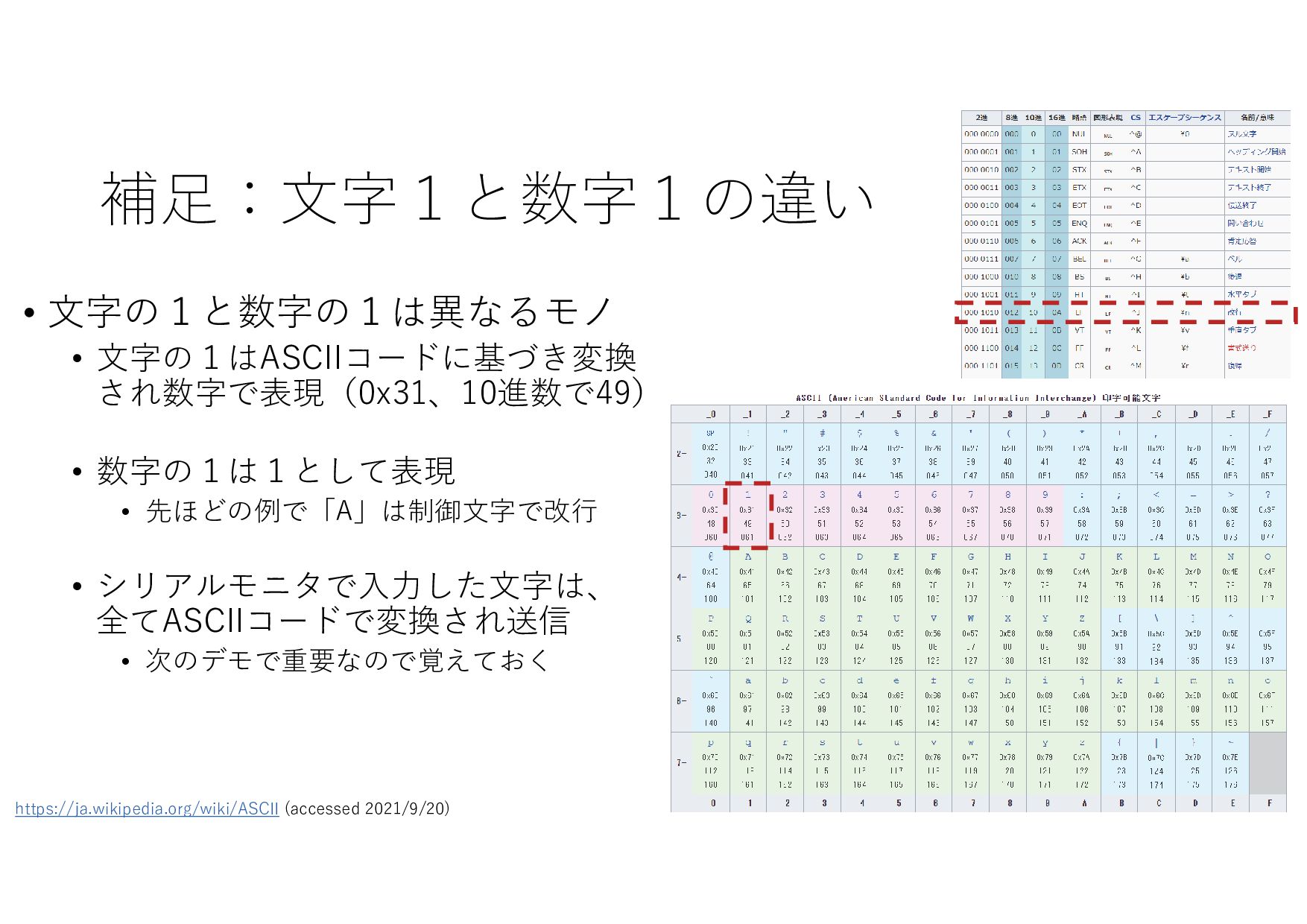
![#define RCV_SIZE 10 #define RCV_LOOP 10 byte rcvData[RCV_SIZE]; //-------------------------------------------------------------------- //loop()](https://files.speakerdeck.com/presentations/0b99988e3c324ea4b42556c7f9adcf8b/slide_36.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}