will tell about:
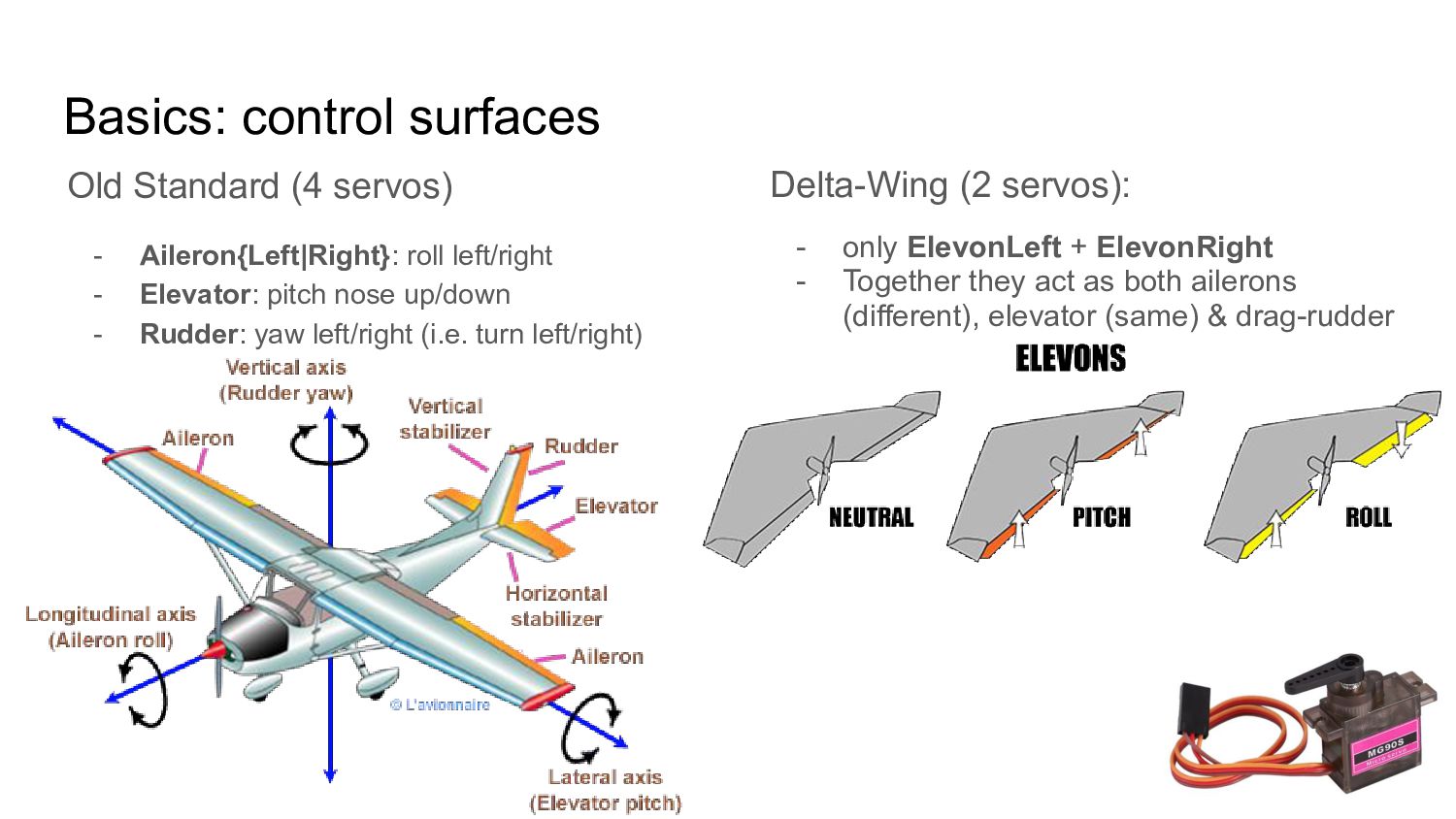
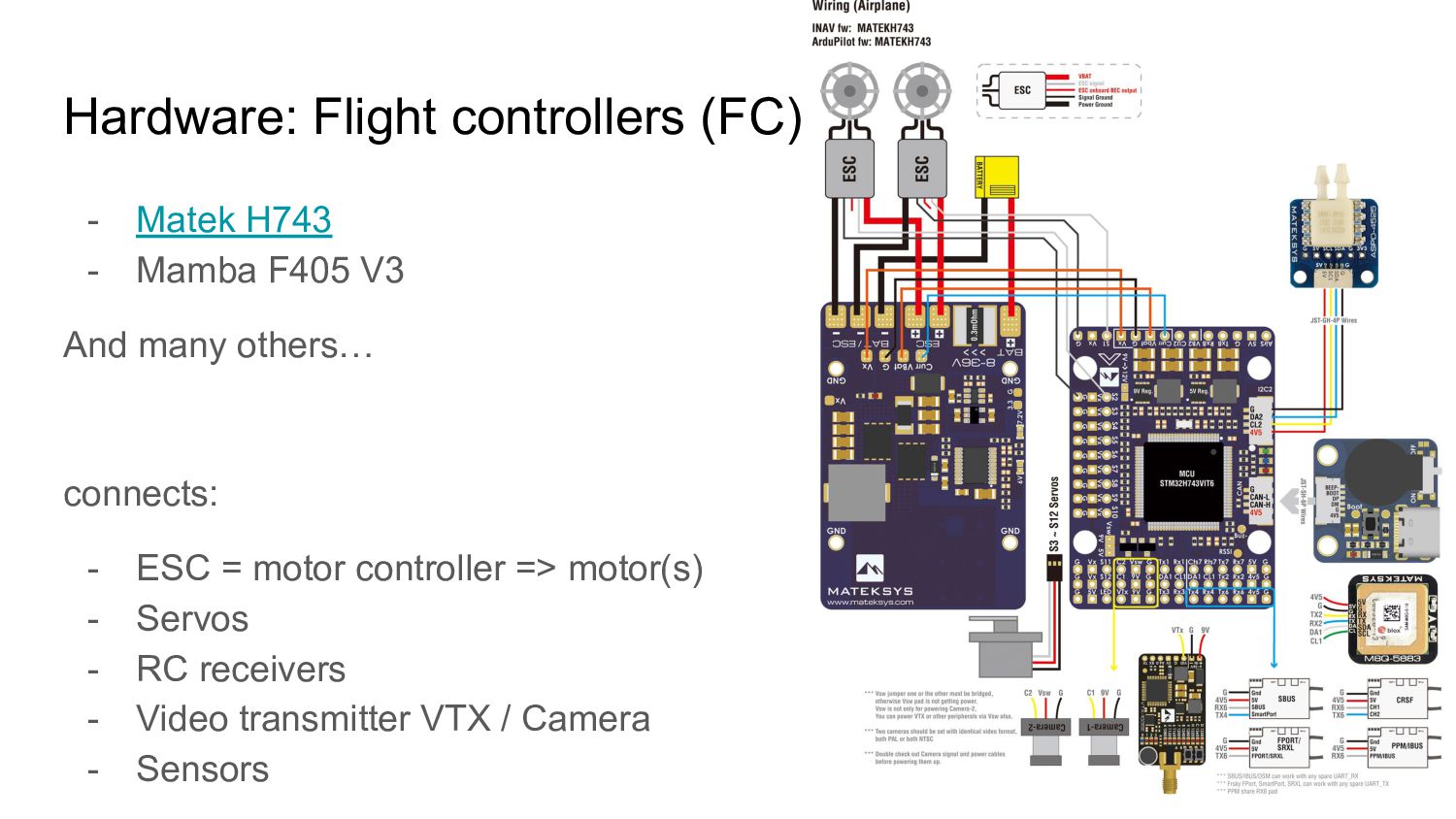
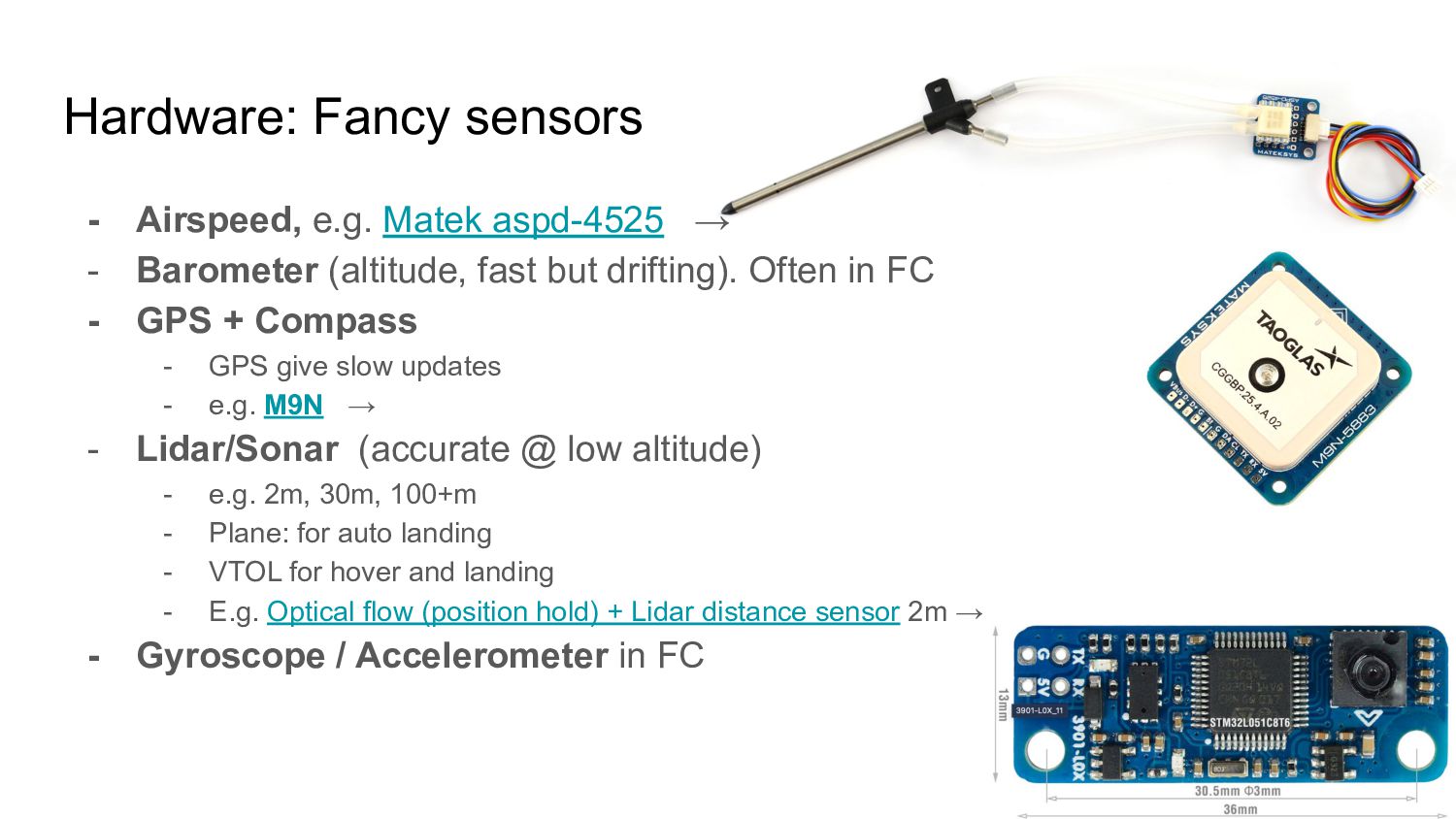
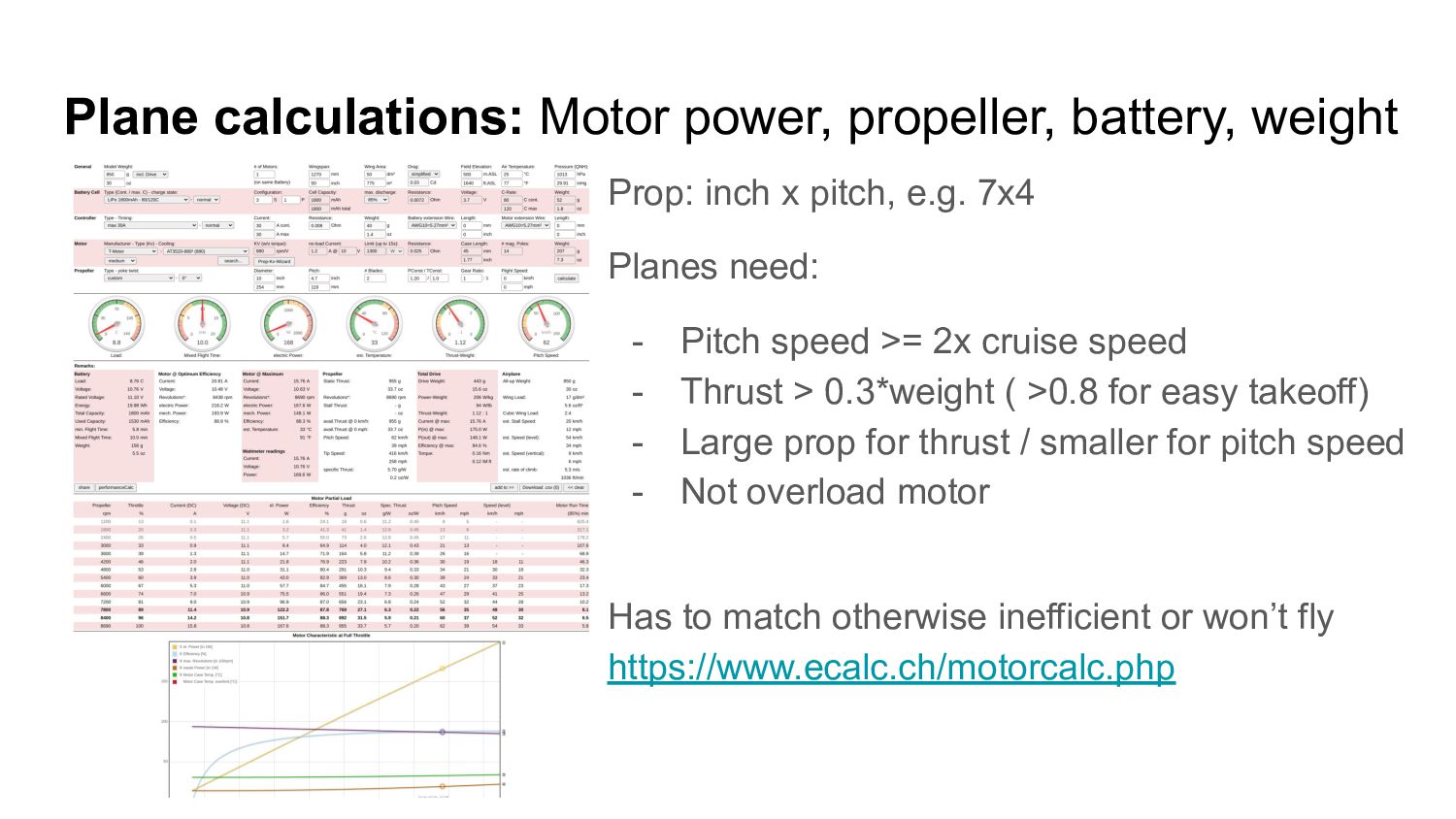
- quick overview of hardware in Airplane models to feel what's like to construct one - quite easy! (Flight Controller "computer"`, e.g. [Mamba STM32 F405](https://ardupilot.org/plane/docs/common-mamba-basic-mk3.html) with onboard gyro/accelerometer/barometer sensors, control surfaces/Servos, motor(s), wing, radio systems for control/telemetry & video)
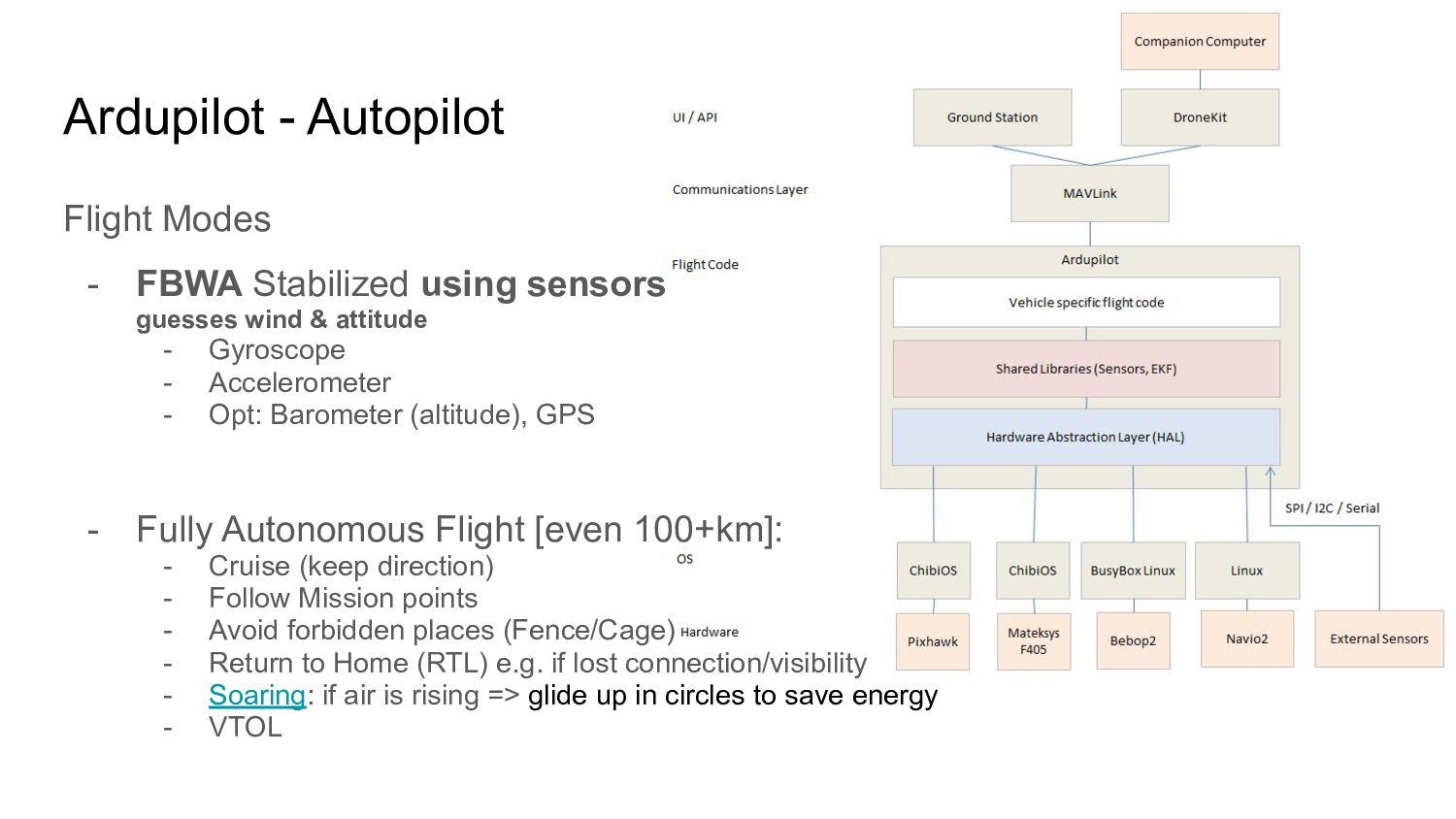
- [Ardupilot](https://ardupilot.org/plane/index.html) as the most popular and capable OSS autopilot software (not only for planes - quadcopters, cars, submarines,etc) including:
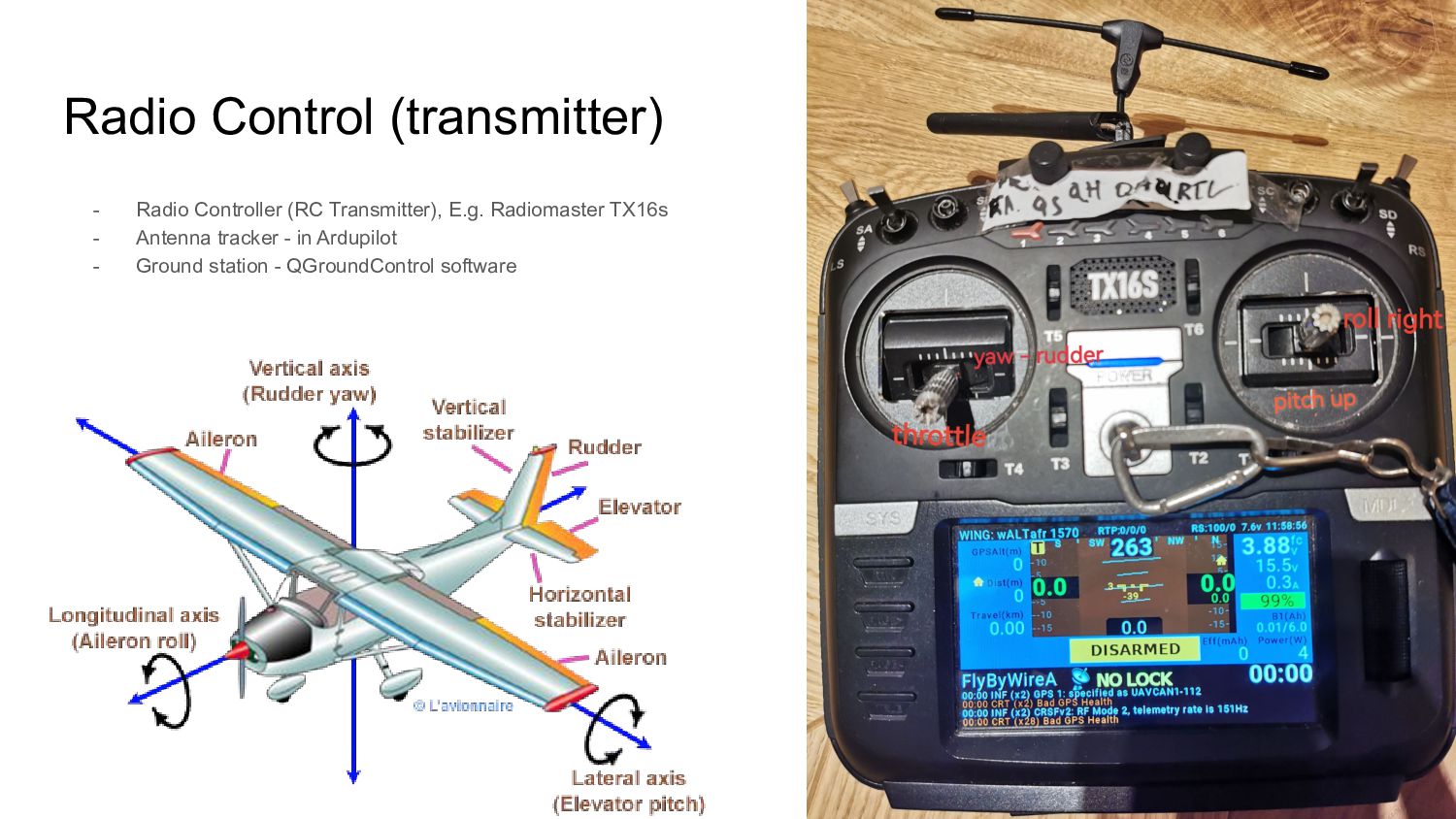
* main wing flight modes: airplane stabilization (FBWA) and even autonomous flight missions - as programmed, or return to home (RTL) if lost control radio link
* VTOL - how `Vertical Take-Off and Landing` simplifies and makes the takeoff safer, even increasing the payload capacity and possible flight duration/distance (by allowing to use higher minimum speed)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}