acoustique? Han Wang 1 Ecole Polytechnique www.math.ens.fr/~hanwang Seminaire du Centre de Cournot, IHPST, Paris 12 Mars 2015 1. Travail conjoint avec H.Ammari, T.Boulier, D.Chung, J.Garnier, W.Jing, H.Kang, M.P.Tran 1
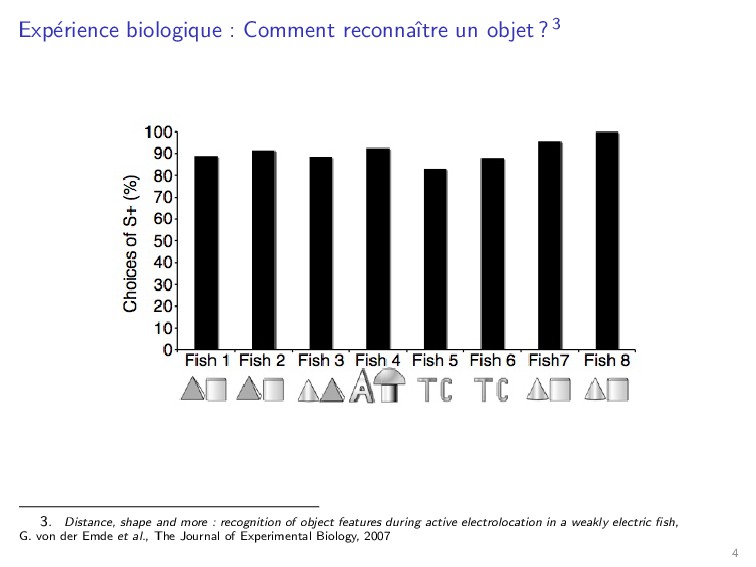
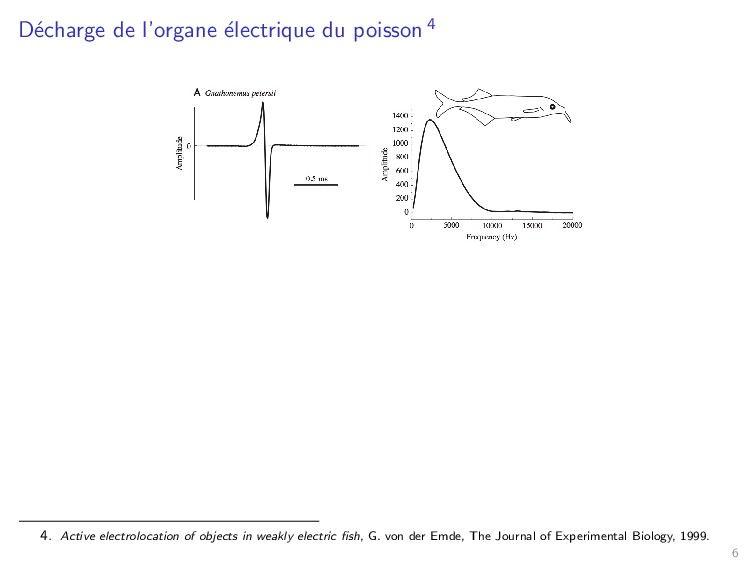
3 3. Distance, shape and more : recognition of object features during active electrolocation in a weakly electric fish, G. von der Emde et al., The Journal of Experimental Biology, 2007 4
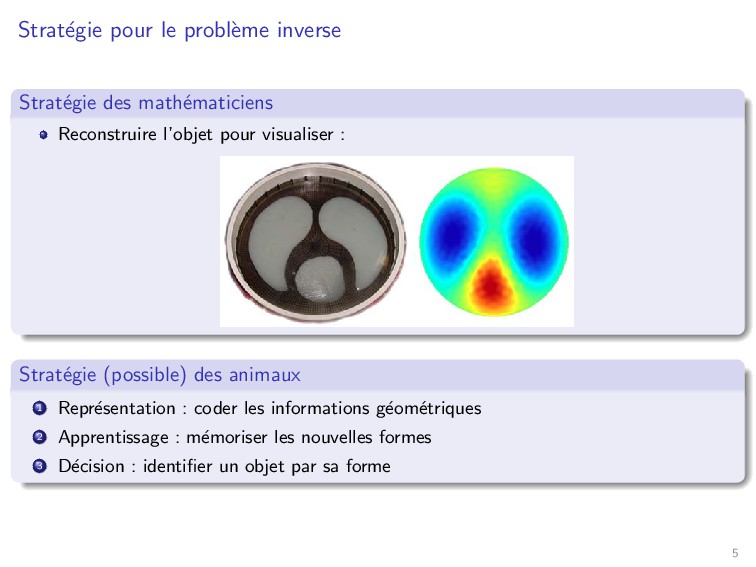
math´ ematiciens Reconstruire l’objet pour visualiser : Strat´ egie (possible) des animaux 1 Repr´ esentation : coder les informations g´ eom´ etriques 2 Apprentissage : m´ emoriser les nouvelles formes 3 D´ ecision : identifier un objet par sa forme 5
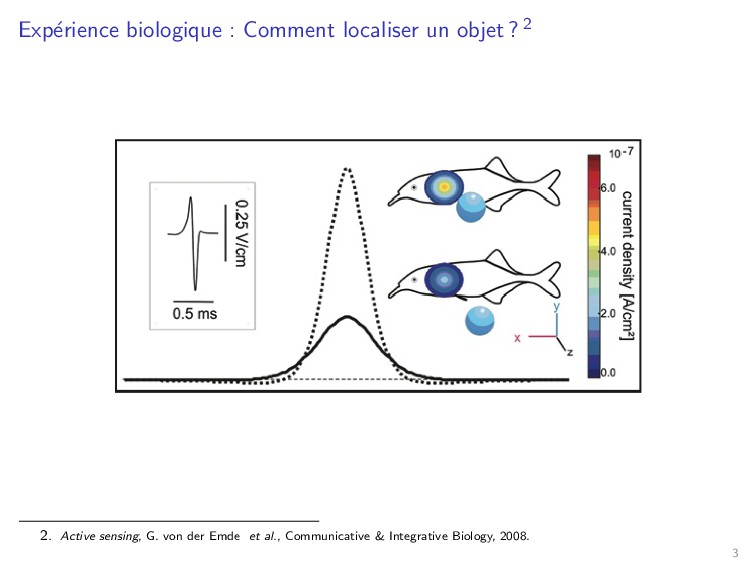
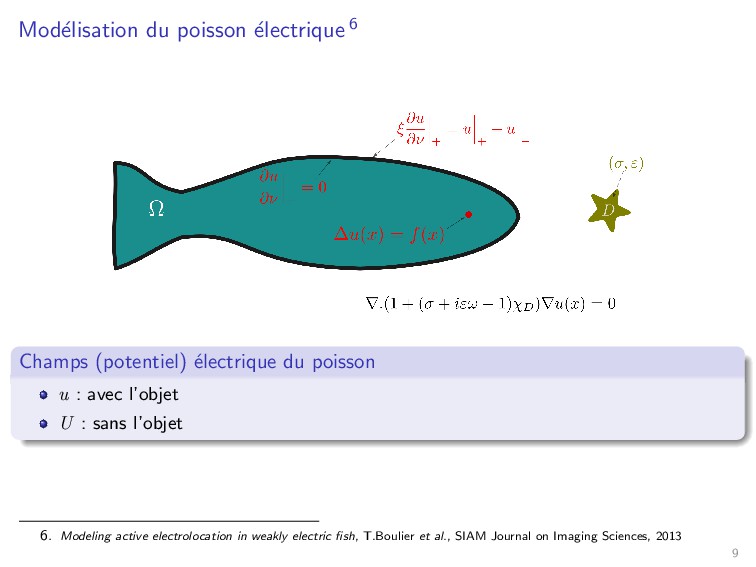
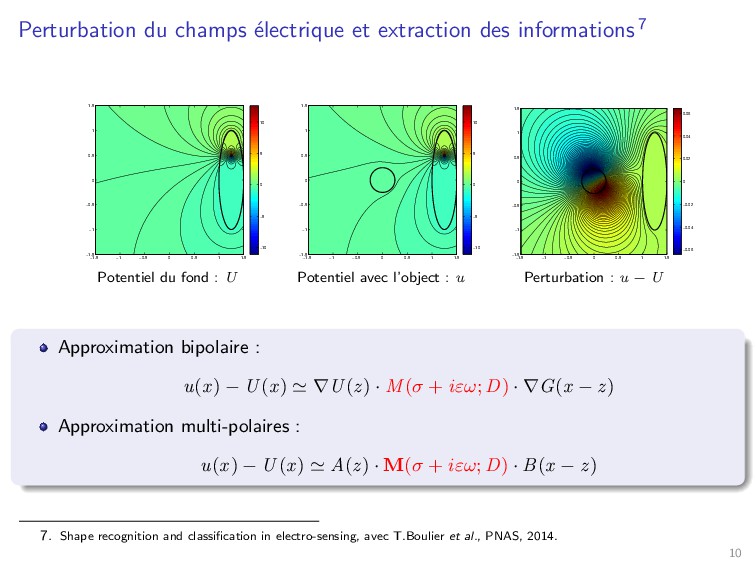
electrique du poisson u : avec l’objet U : sans l’objet 6. Modeling active electrolocation in weakly electric fish, T.Boulier et al., SIAM Journal on Imaging Sciences, 2013 9
invariants Invariant par r´ ecalage. Centre de mass ´ electrique : M12 (D) 2M11 (D) = z + seiθ M12 (D ) 2M11 (D ) Invariant par les valeurs propres : µ1 (D) µ1 (D)2 + µ2 (D)2 = µ1 (D ) µ1 (D )2 + µ2 (D )2 ⇒ Descripteurs de forme invariant ` a la transformation rigide et dilatation. Proc´ edure pour l’identification d’un objet 1 Extraction des informations 2 Calcule des descripteurs de forme 3 Comparaison des descripteurs de forme avec la base de donn´ ee 8. Target Identification Using Dictionary Matching of Generalized Polarization Tensors, avec H.Ammari et al., Foundation of Computational Mathematics, 2013 12
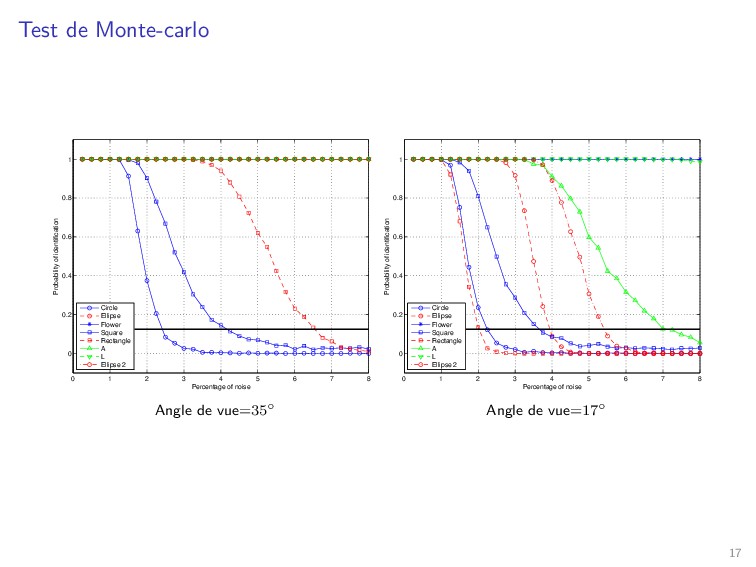
7 8 0 0.2 0.4 0.6 0.8 1 Percentage of noise Probability of identification Circle Ellipse Flower Square Rectangle A L Ellipse 2 Angle de vue=35◦ 0 1 2 3 4 5 6 7 8 0 0.2 0.4 0.6 0.8 1 Percentage of noise Probability of identification Circle Ellipse Flower Square Rectangle A L Ellipse 2 Angle de vue=17◦ 17
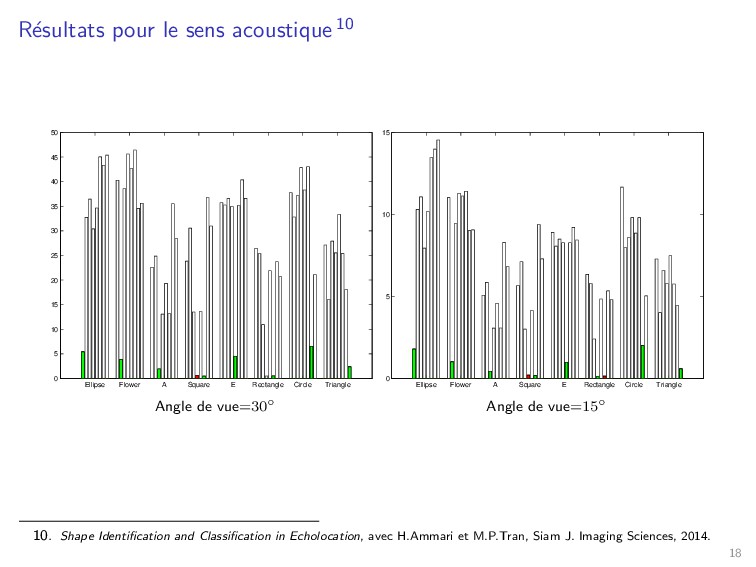
Square E Rectangle Circle Triangle 0 5 10 15 20 25 30 35 40 45 50 Angle de vue=30◦ Ellipse Flower A Square E Rectangle Circle Triangle 0 5 10 15 Angle de vue=15◦ 10. Shape Identification and Classification in Echolocation, avec H.Ammari et M.P.Tran, Siam J. Imaging Sciences, 2014. 18
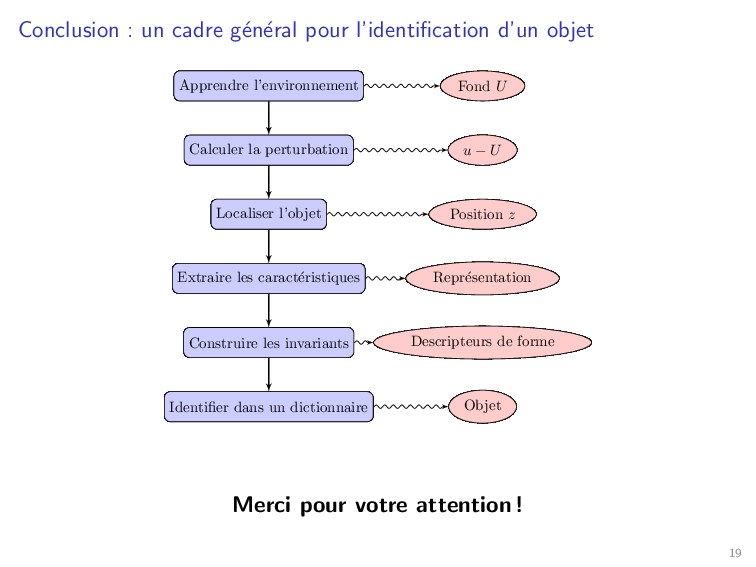
objet Apprendre l’environnement Fond U Calculer la perturbation u − U Localiser l’objet Position z Extraire les caract´ eristiques Repr´ esentation Construire les invariants Descripteurs de forme Identifier dans un dictionnaire Objet Merci pour votre attention ! 19
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}