Mathematics and Applications Ecole Normale Sup´ erieure, Paris www.math.ens.fr/~hanwang Groupe de travail M´ ethodes Num´ eriques Laboratoire Jacques-Louis Lions, UPMC April 28, 2014 1 Joint work with H.Ammari, T.Boulier, J.Chen, Z.Chen, D.Chung, J.Garnier, W.Jing, H.Kang, S.Mallat, M.P.Tran, D.Volkov, I.Waldspurger 1
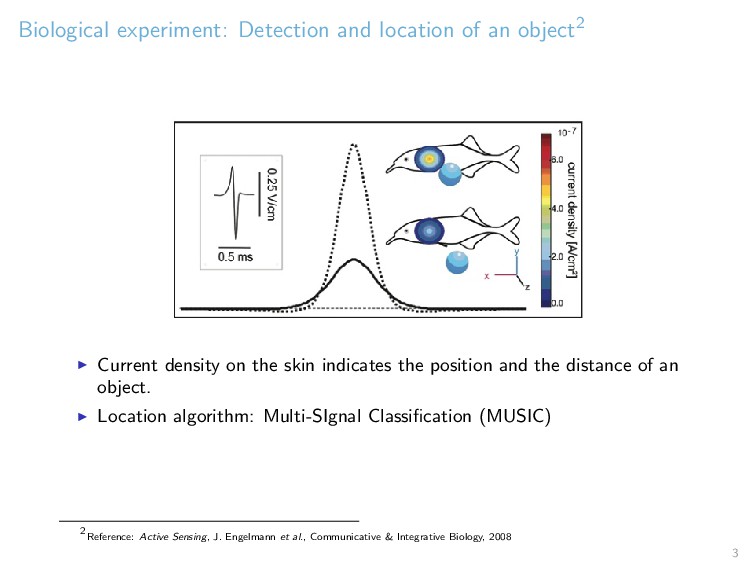
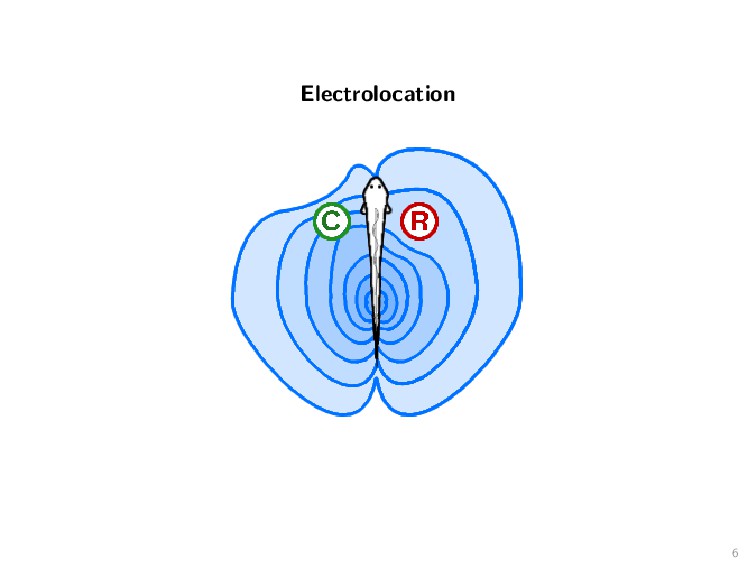
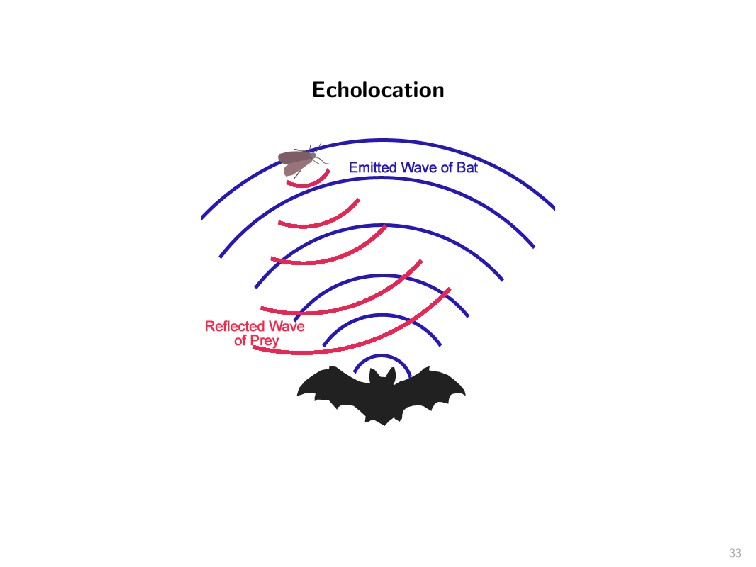
on the skin indicates the position and the distance of an object. Location algorithm: Multi-SIgnal Classification (MUSIC) 2 Reference: Active Sensing, J. Engelmann et al., Communicative & Integrative Biology, 2008 3
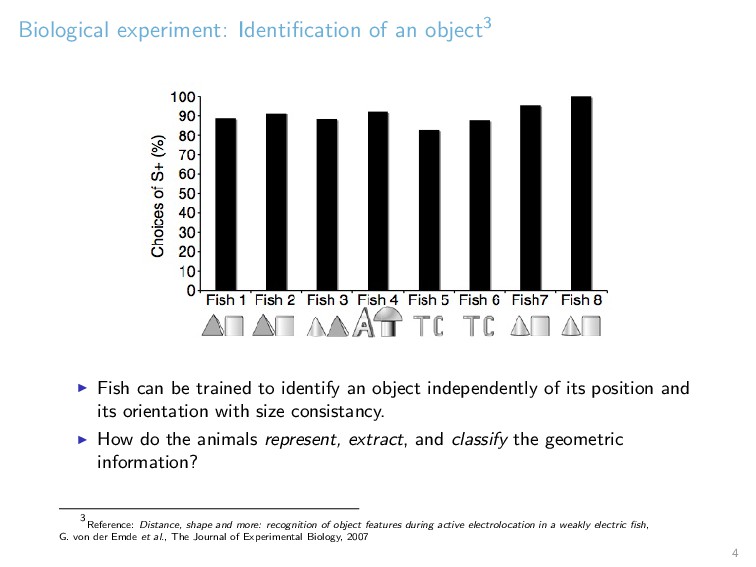
to identify an object independently of its position and its orientation with size consistancy. How do the animals represent, extract, and classify the geometric information? 3 Reference: Distance, shape and more: recognition of object features during active electrolocation in a weakly electric fish, G. von der Emde et al., The Journal of Experimental Biology, 2007 4
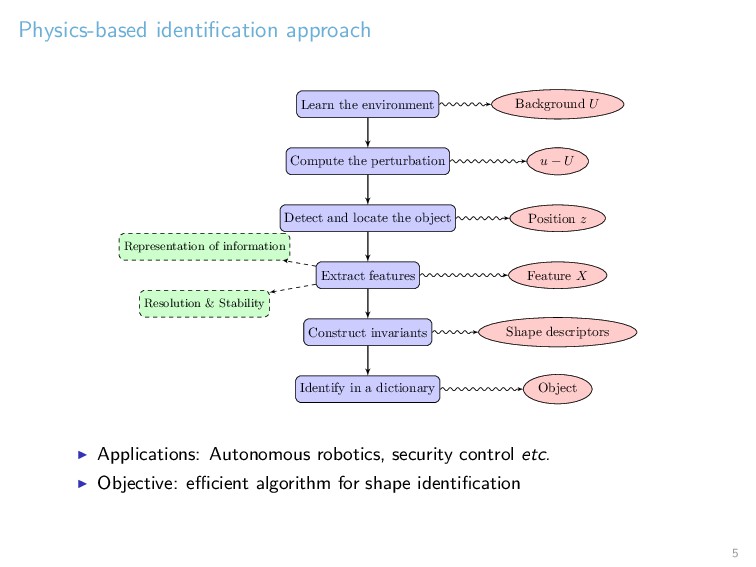
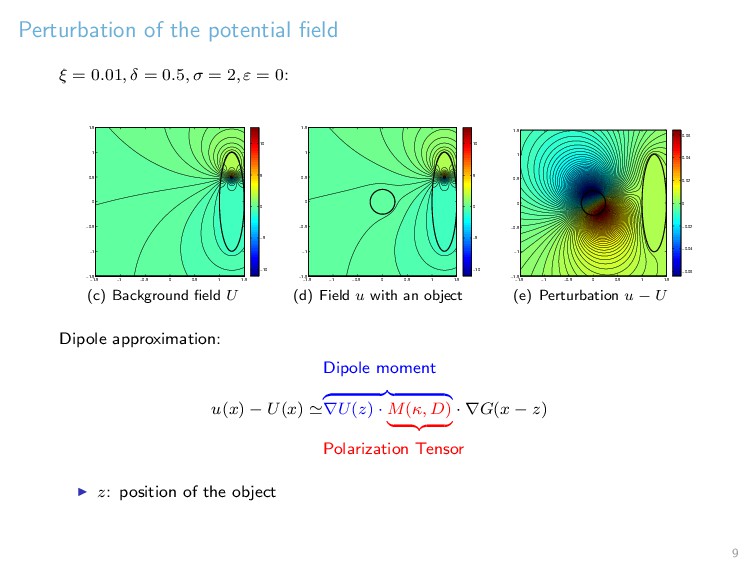
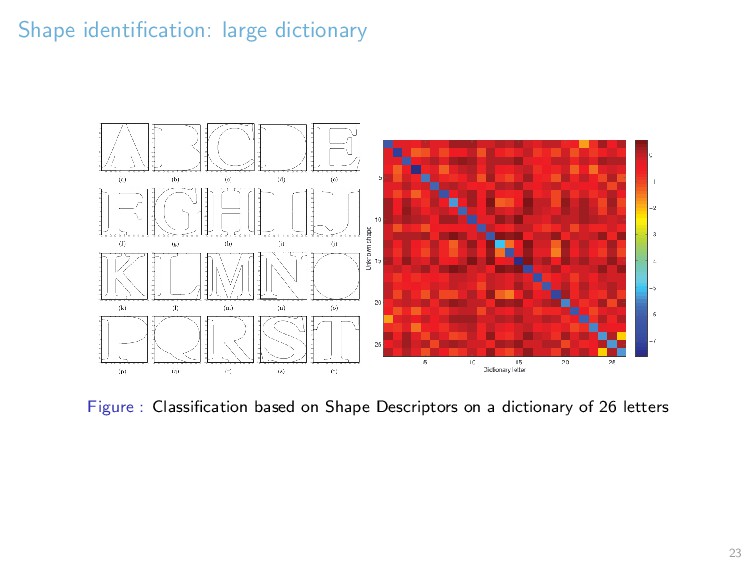
perturbation u − U Detect and locate the object Position z Extract features Feature X Construct invariants Shape descriptors Identify in a dictionary Object Representation of information Resolution & Stability Applications: Autonomous robotics, security control etc. Objective: efficient algorithm for shape identification 5
D) · ∇ ∂G ∂νx (xr − z) Define the vector, z in the search domain, ˜ g(z ) := ∇U(z ) · ∇ ∂G ∂νx (x1 − z ), . . . , ∇U(z ) · ∇ ∂G ∂νx (xL − z ) T , and its normalized version g = ˜ g/|˜ g|. Imaging functional has a large peak at z: I(z ) := 1 |(Id −P)g(z )| , P: the orthogonal projection onto the first singular vector of the space-frequency response matrix Vs = (V k sr )rk. 12
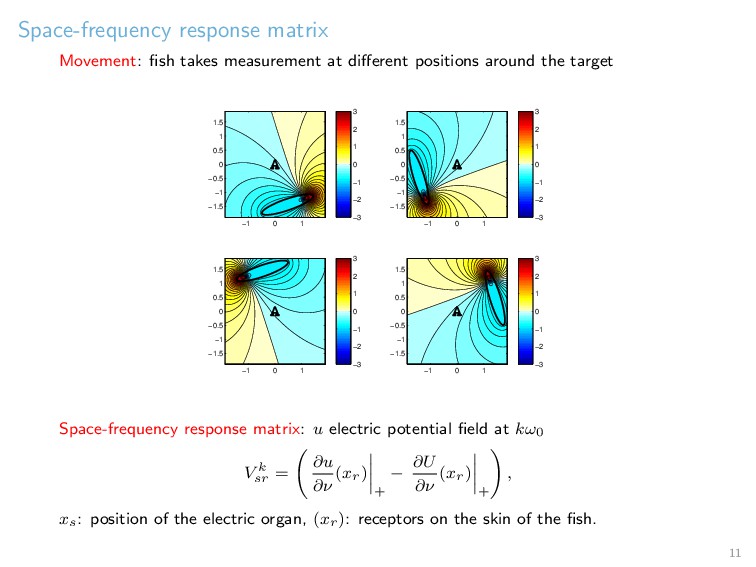
iεkω0. We have the linear system: V k sr = ∂u ∂ν + − ∂U ∂ν + (xr) ∇U(z) · Mk · ∂G ∂νx (xr − z) L(Mk)sr Reconstruct Mk from V k by solving the least square problem: Mk = arg min M L(M) − V k L depends only on the postions of xs, xr Well conditioned system for full aperture and equally distributed xs, xr Inversion of L: very cheap operation – Post-processing on V by 1 2 I − K∗ Ω − ξ ∂DΩ ∂ν to convert the Green function of Robin boundary condition – Take imaginary part to eliminate the background field U 14
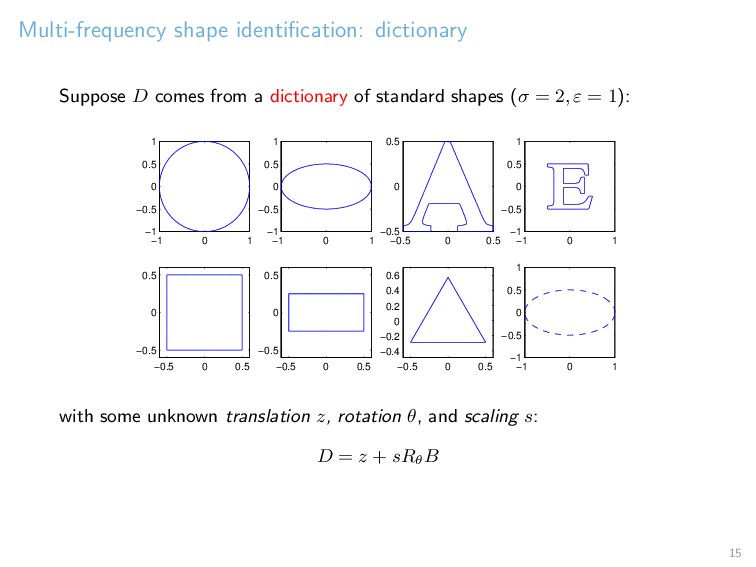
M(κ(ω), D): invariant to translation M(κ(ω), D + z) = M(κ(ω), D) µj(ω): singular values of M(κ(ω), D) invariant to rotation Effect of scaling: M(κ(ω), sD) = s2M(κ(ω), D) ω∞: highest probing frequency Normalized multi-frequency singular values: Ij(ω; D) := µj(ω) µj(ω∞) , for j = 1, . . . , d. Invariant with respect to arbitrary translation, rotation, scaling: Ij(ω; D) = Ij(ω; z + sRθB). Shape identification in the dictionary by comparing Ij(ω; D) with precomputed Ij(ω; Bm), m = 1, . . . 8. 5 Shape recognition and classification in electro-sensing with H.Ammari, T.Boulier and J.Garnier, To appear in Proceedings of the National Academy of Sciences of the United States of America, 2014 16
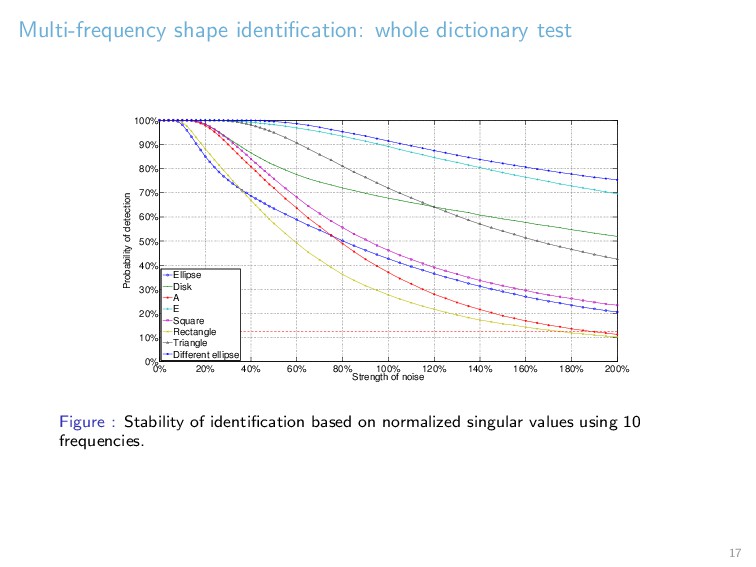
80% 100% 120% 140% 160% 180% 200% 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% Strength of noise Probability of detection Ellipse Disk A E Square Rectangle Triangle Different ellipse Figure : Stability of identification based on normalized singular values using 10 frequencies. 17
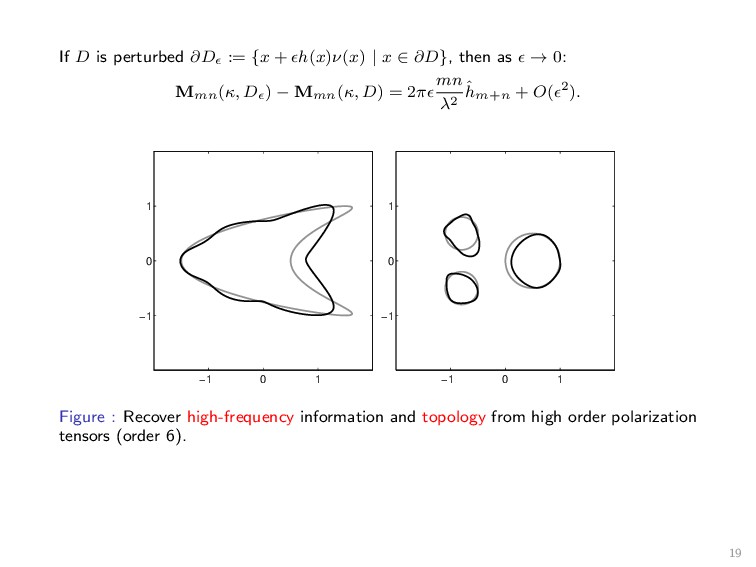
y (λI − K∗ D )−1 [ν](y) dσ(y) Generalized polarization tensors: Mmn = ∂D Pm(y)(λI − K∗ D )−1 ∂Qn ∂ν (y) dσ(y) = Mcc mn Mcs mn Msc mn Mss mn with Pm(y), Qm(y): real or imaginary part of (y1 + iy2)m. Polarization tensor contains only low frequency information; mixture of material parameter and size. High-frequency oscillations of the boundary deformations are only contained in high order polarization tensors. 18
with H(x) = Γ(x) + SΩ ∂u ∂ν + (x) − ξDΩ ∂u ∂ν + (x) Multi-polar expansion Vsr = K+1 m+n=1 SsmMmnR(s) nr L(M)sr +O(δK+2). Extraction of feature: M = arg min M L(M) − V L is exponentially ill-conditionned. Mmn decays exponentially with m + n. Maximum resolving order: K log σnoise log(R/δ) 6 Shape recognition and classification in electro-sensing, H.Ammari, T.Boulier, J.Garnier, H.Wang, To appear in PNAS 20
= ei(m+n)θMmn(D) Translation: Mmn(D + z) = m l=1 n k=1 Cz ml Mlk(D)Cz nk Registration point: for D = z + sRθB, M12(D) 2M11(D) u(D) = z + seiθ M12(B) 2M11(B) u(B) Construct transform invariant shape descriptors I so that I(D) = I(z + sRθD) for arbitrary scaling, rotation, and translation. 7 Target identification using dictionary matching of generalized polarization tensors, with H.Ammari, T.Boulier, J.Garnier, W.Jing, and H.Kang, in Foundations of Computational Mathematics, 2014 21
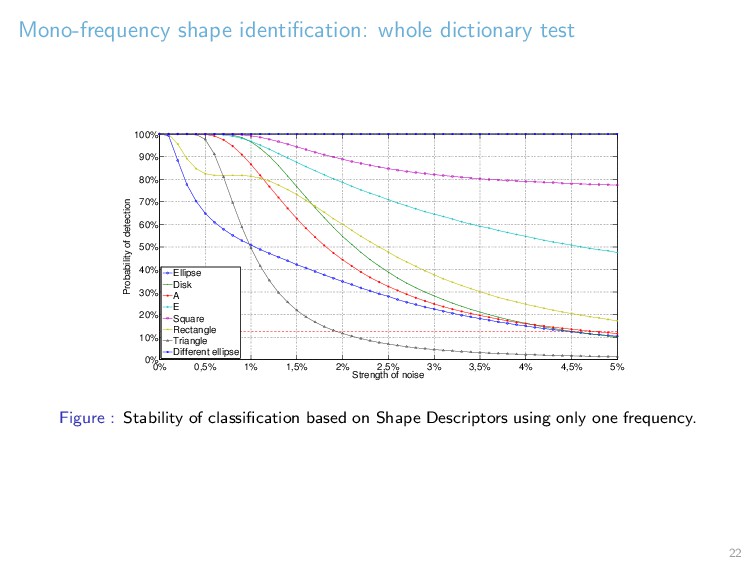
2% 2,5% 3% 3,5% 4% 4,5% 5% 0% 10% 20% 30% 40% 50% 60% 70% 80% 90% 100% Strength of noise Probability of detection Ellipse Disk A E Square Rectangle Triangle Different ellipse Figure : Stability of classification based on Shape Descriptors using only one frequency. 22
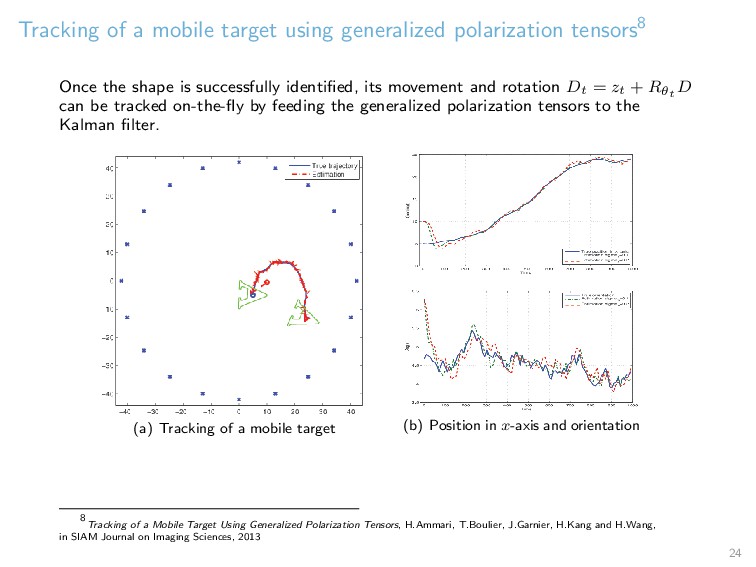
the shape is successfully identified, its movement and rotation Dt = zt + Rθt D can be tracked on-the-fly by feeding the generalized polarization tensors to the Kalman filter. (a) Tracking of a mobile target (b) Position in x-axis and orientation 8 Tracking of a Mobile Target Using Generalized Polarization Tensors, H.Ammari, T.Boulier, J.Garnier, H.Kang and H.Wang, in SIAM Journal on Imaging Sciences, 2013 24
(e) Stabilities More information can be reconstructed with near field measurement. How to choose the right basis for the representation and reconstruction of features? 25
H2(Rd) × H1(Rd) → R: T (f, g) := ∂D g(x)(λI − K∗ D )−1 ∂f ∂ν (x) ds(x) D = D if and only if their associated T are the same Representation of T ↔ features of D: Xmn = T (em, en) {em}m is a basis of Hs(Rd), s = 1, 2. – polynomial basis: generalized polarization tensors, global feature – wavelet basis: local feature Multistatic response matrix (EIT in free space): Vsr = ∂D Γr(x)(λI − K∗ D )−1 ∂Γs ∂ν (x) ds(x) Asymptotic expansion: Vsr = T (PK Γs, PK Γr) + Esr γs Xγr L(X)sr 9 Wavelet methods for shape perception in electro-sensing with H.Ammari, S.Mallat, and I.Waldspurger, submitted to Mathematics of Computation, 2013 26
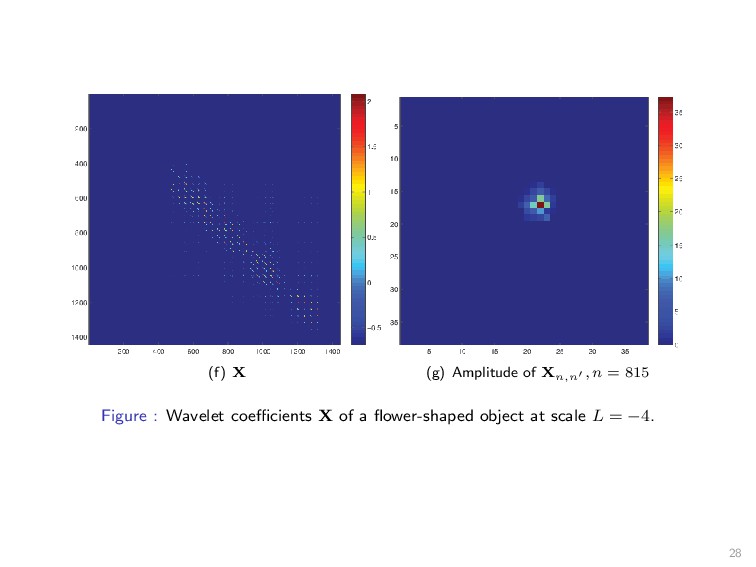
order 6: φ ∈ Cr 0 (R2), r ≥ 2. φL,n(x) = 2−Lφ(2−Lx − n), L ∈ Z, n ∈ Z2 Orthonormal basis of L2(R2), basis of Hs(R2), s = 1, 2. Xn,n = T (φL,n, φL,n ) = ∂D φL,n (x)(λI − K∗ D )−1 ∂φL,n ∂ν (x)ds(x). Very high dimension: ∼ 2−4L coefficients Very high sparsity: ∼ 22L (ratio of non-zeros) Localization of the boundary by the diagonal coefficients: |T (φL,n, φL,n )| = O(2−2L) for overlapped φL,n, φL,n , O(2−L) otherwise. 27
reconstruction of X X := arg min X L(X) − V 2 + µ X 1 , Algorithm 1 Imaging by maximum Input: the matrix X of an unknown shape D, a zero-valued matrix I. for n ∈ Z2 do 1. n ← arg max n ∈Z2 |Xn,n | 2. I(n) ← I(n) + |Xn,n |; end for Output: the 2D image I. 29
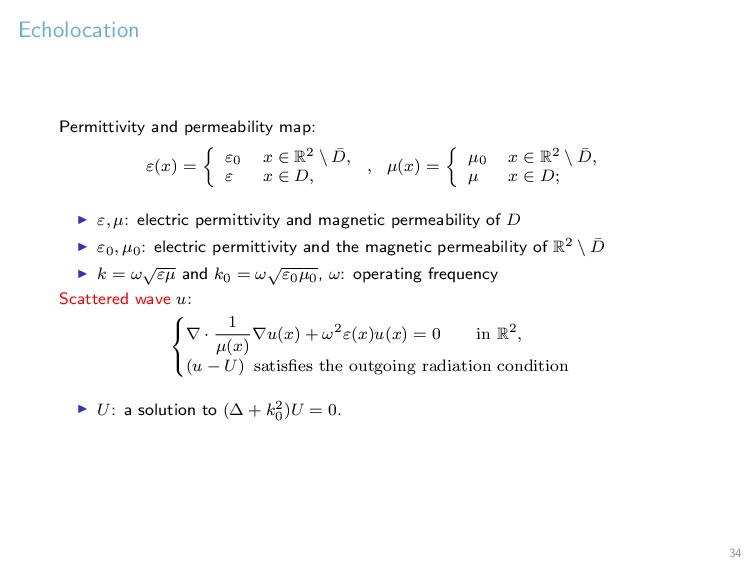
R2 \ ¯ D, ε x ∈ D, , µ(x) = µ0 x ∈ R2 \ ¯ D, µ x ∈ D; ε, µ: electric permittivity and magnetic permeability of D ε0, µ0: electric permittivity and the magnetic permeability of R2 \ ¯ D k = ω √ εµ and k0 = ω √ ε0µ0, ω: operating frequency Scattered wave u: ∇ · 1 µ(x) ∇u(x) + ω2ε(x)u(x) = 0 in R2, (u − U) satisfies the outgoing radiation condition U: a solution to (∆ + k2 0 )U = 0. 34
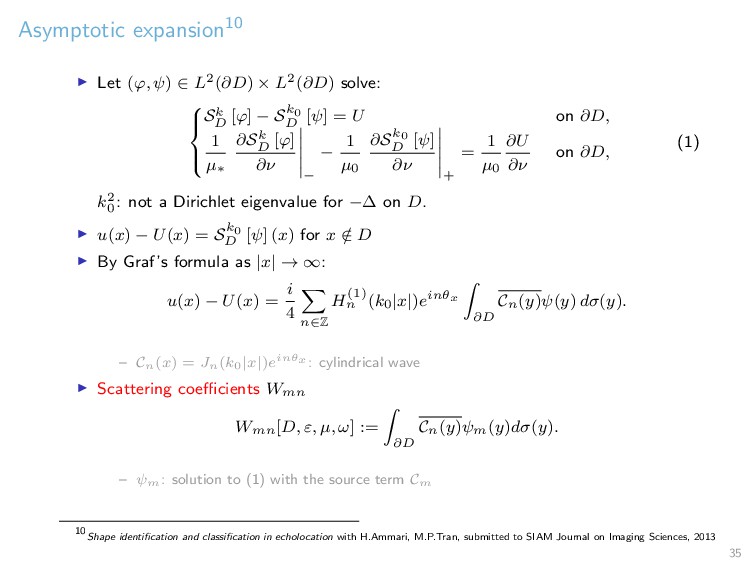
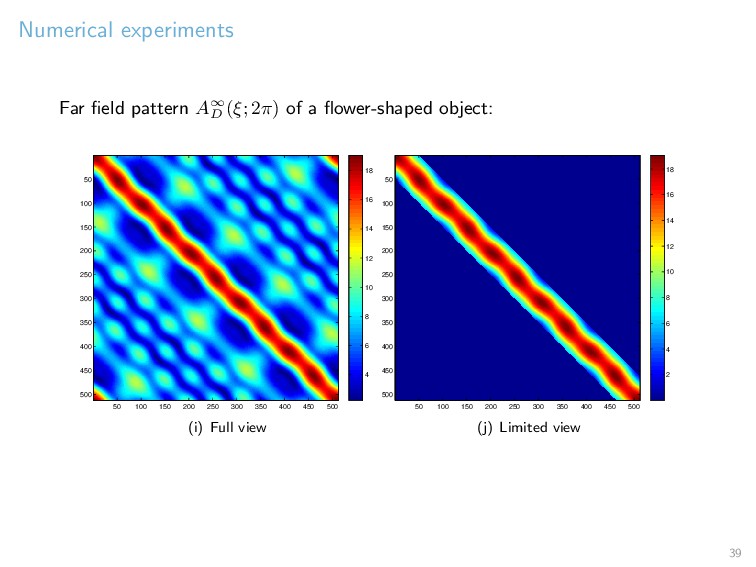
Sk D [ϕ] − Sk0 D [ψ] = U on ∂D, 1 µ∗ ∂Sk D [ϕ] ∂ν − − 1 µ0 ∂Sk0 D [ψ] ∂ν + = 1 µ0 ∂U ∂ν on ∂D, (1) k2 0 : not a Dirichlet eigenvalue for −∆ on D. u(x) − U(x) = Sk0 D [ψ] (x) for x / ∈ D By Graf’s formula as |x| → ∞: u(x) − U(x) = i 4 n∈Z H(1) n (k0|x|)einθx ∂D Cn(y)ψ(y) dσ(y). – Cn(x) = Jn(k0|x|)einθx : cylindrical wave Scattering coefficients Wmn Wmn[D, ε, µ, ω] := ∂D Cn(y)ψm(y)dσ(y). – ψm: solution to (1) with the source term Cm 10 Shape identification and classification in echolocation with H.Ammari, M.P.Tran, submitted to SIAM Journal on Imaging Sciences, 2013 35
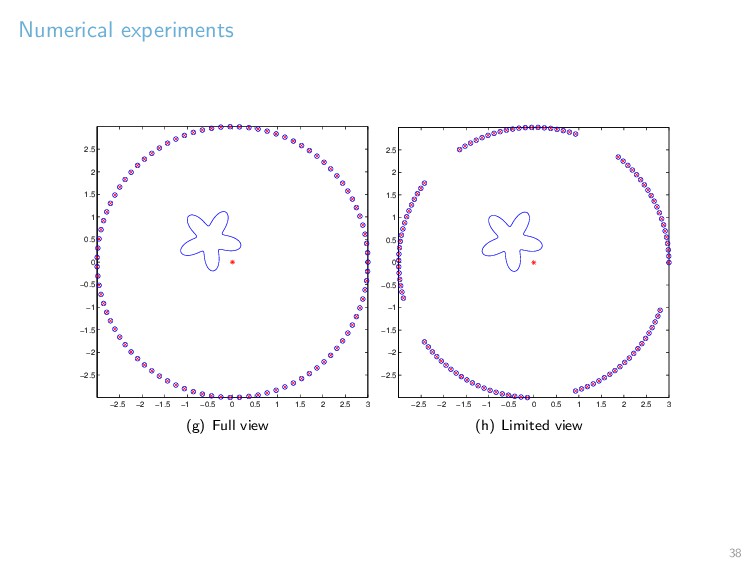
Use plane wave source Us(x) = eik0ξs·x with equally distributed receptors xr Multistatic response matrix Vsr = us(xr) − Us(xr) Linear system: Vsr = m,n∈Z AsmWmn[D − z](B∗)nr = L(W), A, B depend only on the sources and receptors. Extract W by solving a least-squares method W = arg min W L(W) − V L is ill-conditionned, W decays rapidely: |Wmn| C0 |m|+|n| |m||m||n||n| for all m, n ∈ Z. Maximum resolving order K: KK+1/2 SNR 36
of geometric information: global (or local) features for far-field (or near-field or internal) measurements. Feature extraction from measurements and construction of invariants. Classfication and identification in a dictionary. Potential applications in engineering and other type of physics. Thank you! 41
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}