length simultaneously is hard. • Use multiple images with wide range of pan & tilt. • Use a single optimization for all images. – Different pan, tilt and zoom. – Same position & pitch rotation
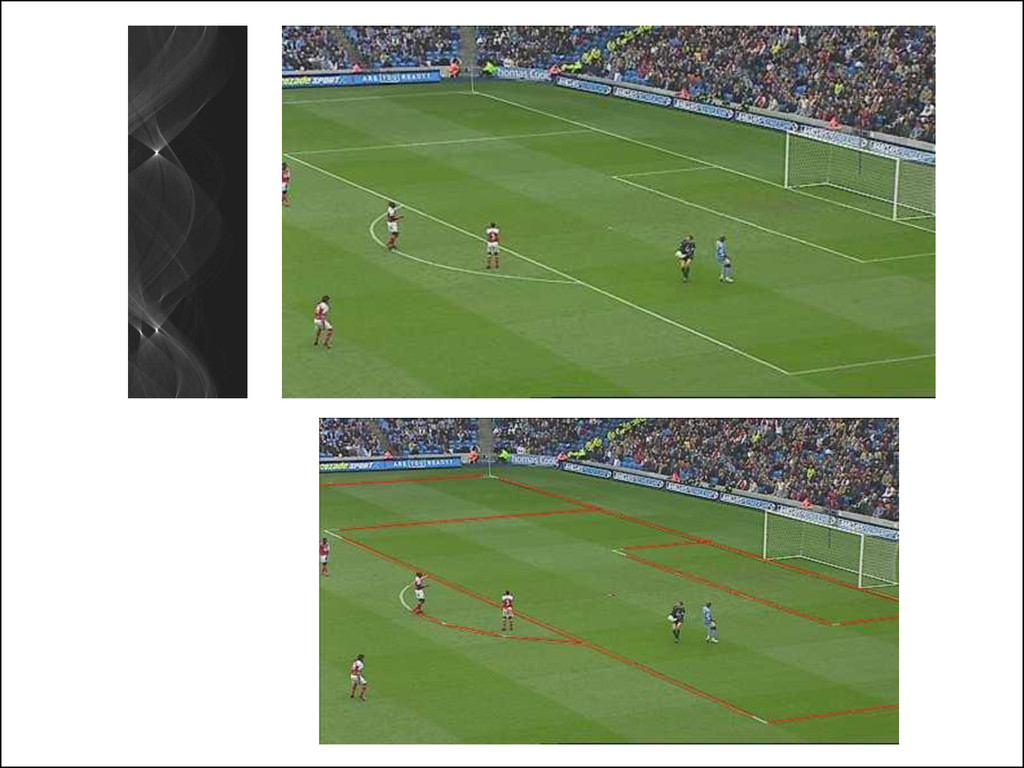
• How good is this estimated pose? 1. we know the pitch model (set of 3D lines) 2. project those lines to image using the pose (set of 2D lines) 3. find those lines in Hough space (set of Hough bins) 4. match-value = sum of found Hough bins
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}