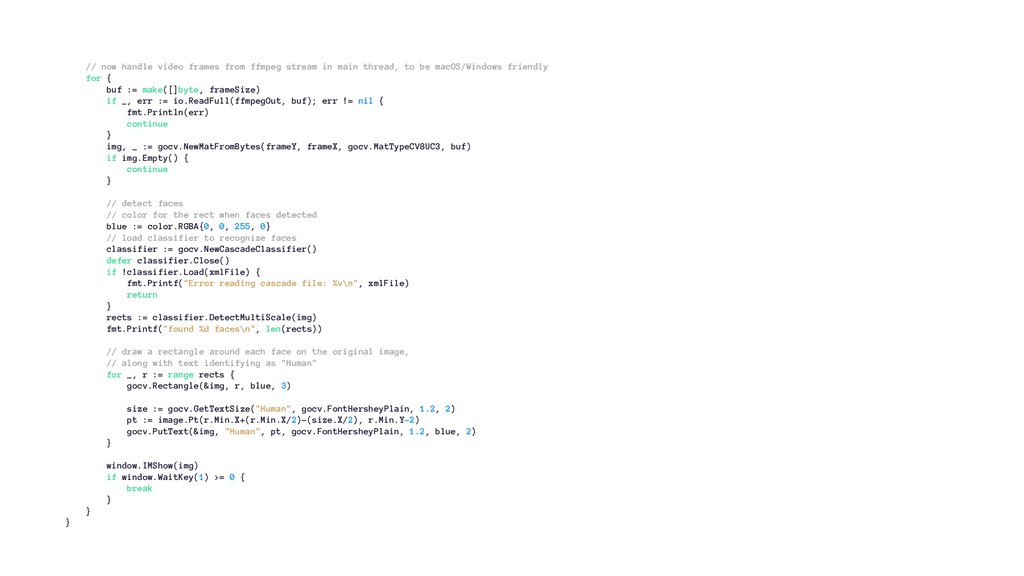
thread, to be macOS/Windows friendly for { buf := make([]byte, frameSize) if _, err := io.ReadFull(ffmpegOut, buf); err != nil { fmt.Println(err) continue } img, _ := gocv.NewMatFromBytes(frameY, frameX, gocv.MatTypeCV8UC3, buf) if img.Empty() { continue } // detect faces // color for the rect when faces detected blue := color.RGBA{0, 0, 255, 0} // load classifier to recognize faces classifier := gocv.NewCascadeClassifier() defer classifier.Close() if !classifier.Load(xmlFile) { fmt.Printf("Error reading cascade file: %v\n", xmlFile) return } rects := classifier.DetectMultiScale(img) fmt.Printf("found %d faces\n", len(rects)) // draw a rectangle around each face on the original image, // along with text identifying as "Human" for _, r := range rects { gocv.Rectangle(&img, r, blue, 3) size := gocv.GetTextSize("Human", gocv.FontHersheyPlain, 1.2, 2) pt := image.Pt(r.Min.X+(r.Min.X/2)-(size.X/2), r.Min.Y-2) gocv.PutText(&img, "Human", pt, gocv.FontHersheyPlain, 1.2, blue, 2) } window.IMShow(img) if window.WaitKey(1) >= 0 { break } } }
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}