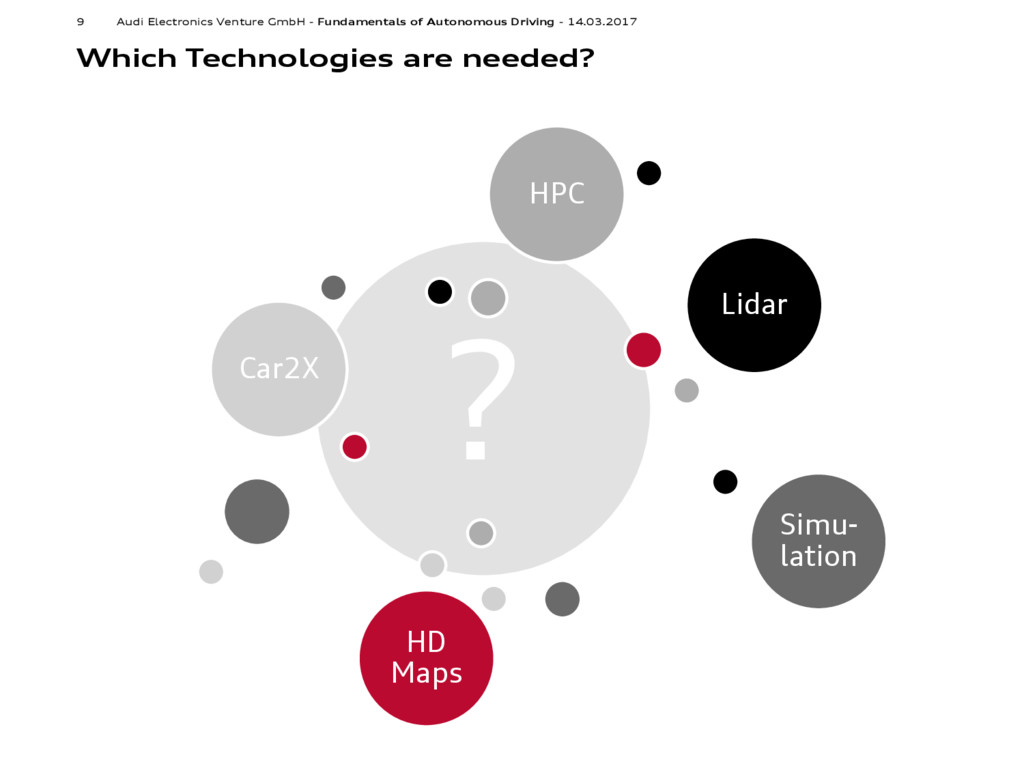
Why didn't self-driving cars hit the market yet? What makes it difficult to build them? And which technologies will play an important role?
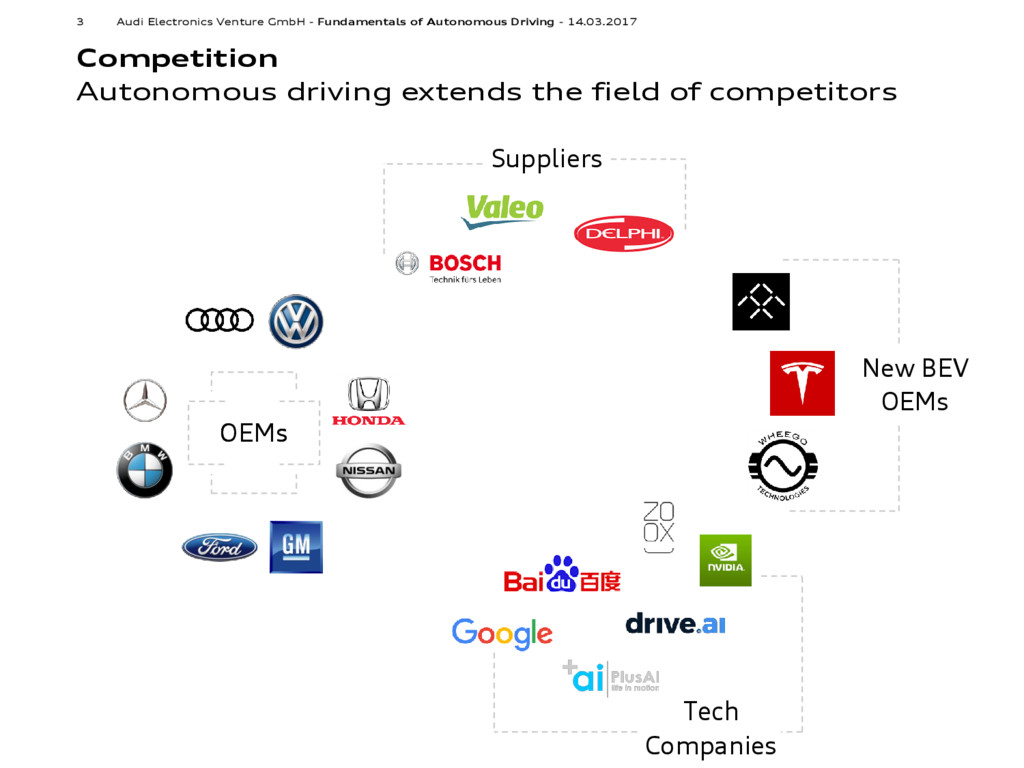
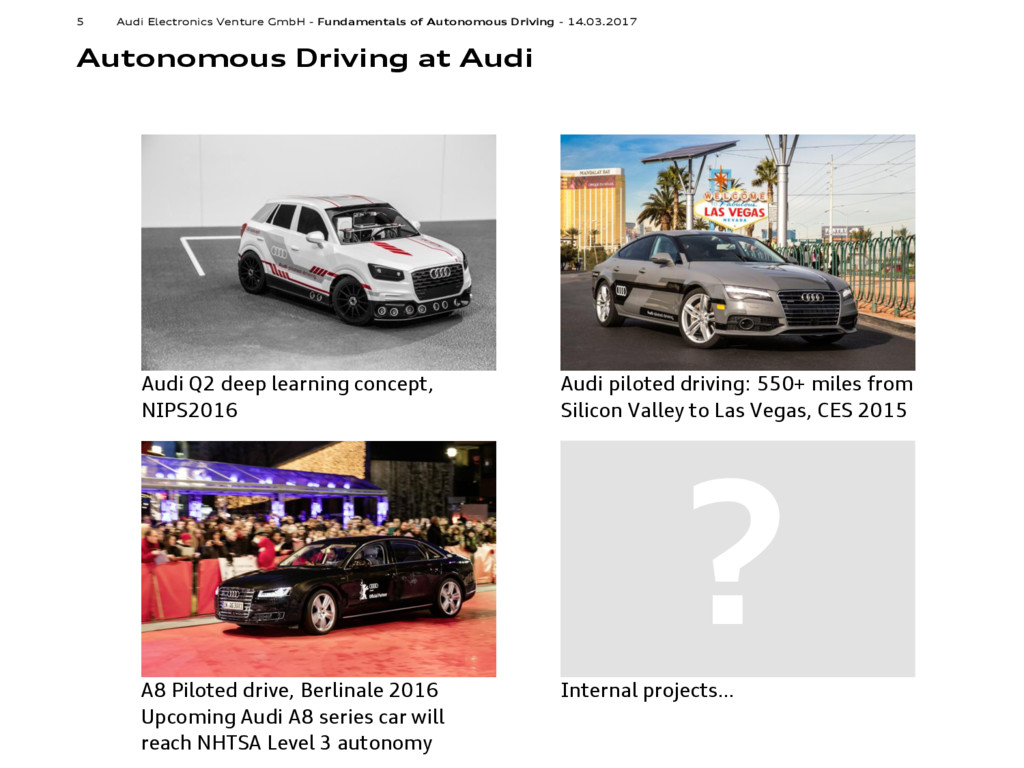
Although self-driving cars were repeatedly announced in recent years, we still don't see them on streets, apart from occasional tests. While the technology behind some of the first autonomous cars seemed somewhat mysterious, it became subject of public discussion in the meanwhile. MOOC providers and universities are offering courses on the engineering of self-driving systems and a wave of startups has spawned - often just to be bought by traditional car makers soon after [1, 2, 3].
We want to bring the discussion about self-driving cars and the technology to build them to center of the engineer community and share it with everyone who is interested in the topic. This sessions is intended to give an overview of challenges involved with self-driving cars, discusses fundamental technologies. Ideally, the session will not only equip you with the basic understanding of the topic, but also ignite many further discussions.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}