Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
ミニ四駆AI用制御装置の事例紹介
Search
aks3g
August 22, 2024
Research
480
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
ミニ四駆AI用制御装置の事例紹介
FSS2023で発表に使用したスライドです
aks3g
August 22, 2024
More Decks by aks3g
See All by aks3g
自己位置推定精度向上のためのセンサ情報補正
aks3g
0
99
Other Decks in Research
See All in Research
第64回CV・PRML勉強会 論文紹介:Linguistic Priors for Visual Decoupling: Towards Symmetric Vision-Brain Alignment
sokikatayama
0
140
RS-Agent: Automating Remote Sensing Tasks through Intelligent Agent
satai
3
410
Language and AI
ayaniwa
0
180
JICA QUEST 共創×革新プログラム Impact Report(海ノ向こうコーヒー)
ontheslope
0
250
Apache Gravitinoで実現する Icebergカタログ統合とアクセスの一元化
matsumooon
0
370
IA for theory
gpeyre
0
300
某助成金プロジェクト採択に向けて企業研究所のアウトリーチ専任者がやったこと
afroscript
0
130
EIRによる不正端末のブロッキング 5G時代におけるデバイス識別と不正対策の進化
stellarcraft
0
100
Data Visualization Tools in the Age of AI
flekschas
0
170
CVPR2026論文紹介_VLMにとって良いvision encoderとは何か?Rethinking Model Selection in VLM Through the Lens of Gromov-Wasserstein Distance
kobayashi31
1
180
重要だけど測れていないもの:高齢者ケアの見えない課題
theoriatec2024
0
430
言語モデルから言語について語る際に押さえておきたいこと
eumesy
PRO
6
2.5k
Featured
See All Featured
Into the Great Unknown - MozCon
thekraken
41
2.6k
Neural Spatial Audio Processing for Sound Field Analysis and Control
skoyamalab
0
390
Redefining SEO in the New Era of Traffic Generation
szymonslowik
1
370
SEO for Brand Visibility & Recognition
aleyda
0
4.6k
BBQ
matthewcrist
89
10k
The Art of Delivering Value - GDevCon NA Keynote
reverentgeek
16
2.1k
Why Mistakes Are the Best Teachers: Turning Failure into a Pathway for Growth
auna
0
190
How to Align SEO within the Product Triangle To Get Buy-In & Support - #RIMC
aleyda
2
1.7k
AI Search: Where Are We & What Can We Do About It?
aleyda
0
7.7k
sira's awesome portfolio website redesign presentation
elsirapls
0
310
Measuring & Analyzing Core Web Vitals
bluesmoon
9
930
Skip the Path - Find Your Career Trail
mkilby
1
170
Transcript
ミニ四駆AI用制御装置の 事例紹介 赤坂清隆 2023/9/7 FSS2023 1
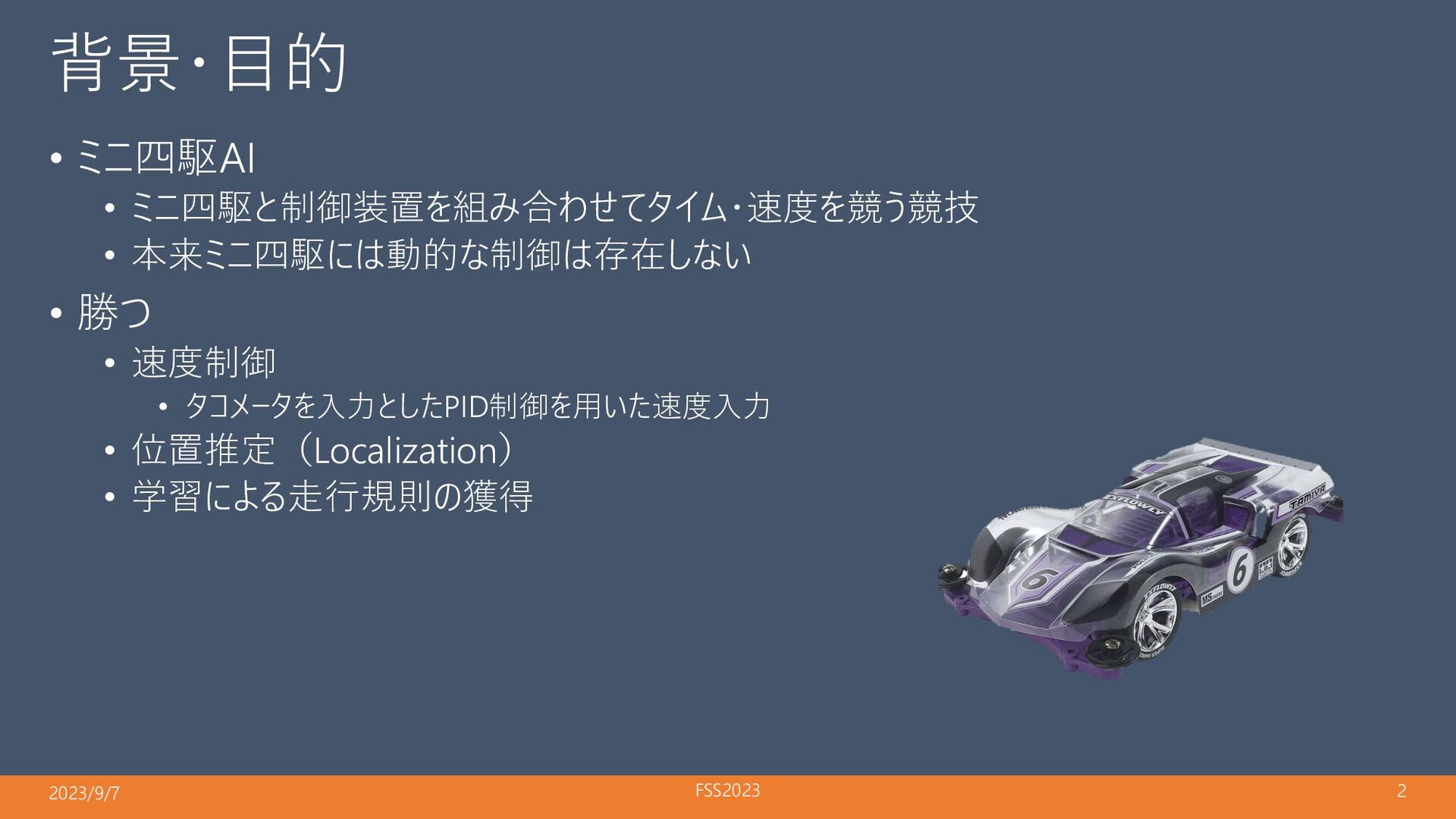
背景・目的 • ミニ四駆AI • ミニ四駆と制御装置を組み合わせてタイム・速度を競う競技 • 本来ミニ四駆には動的な制御は存在しない • 勝つ •
速度制御 • タコメータを入力としたPID制御を用いた速度入力 • 位置推定(Localization) • 学習による走行規則の獲得 2023/9/7 FSS2023 2
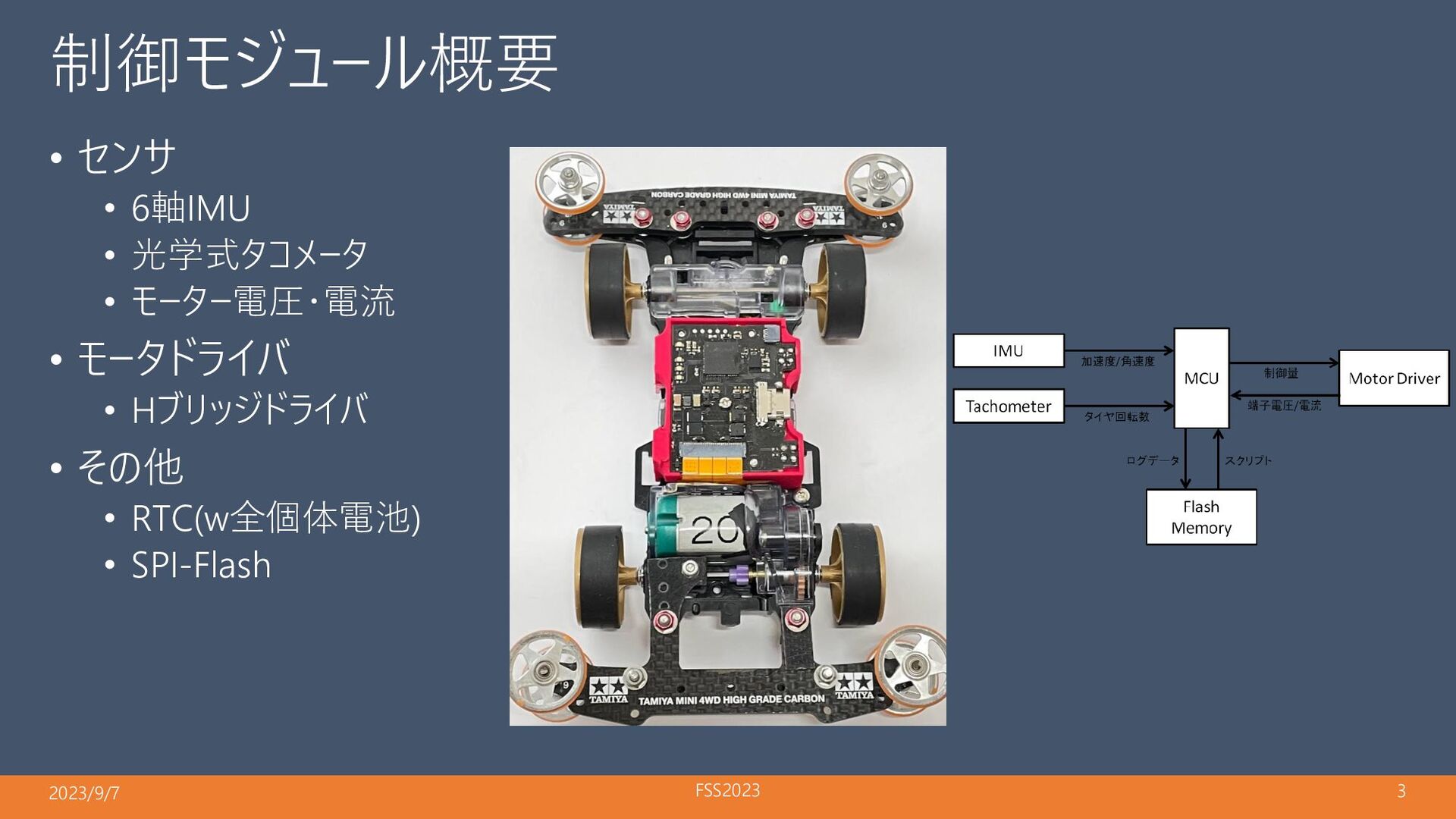
制御モジュール概要 • センサ • 6軸IMU • 光学式タコメータ • モーター電圧・電流 •
モータドライバ • Hブリッジドライバ • その他 • RTC(w全個体電池) • SPI-Flash 2023/9/7 FSS2023 3
位置推定 2023/9/7 FSS2023 4
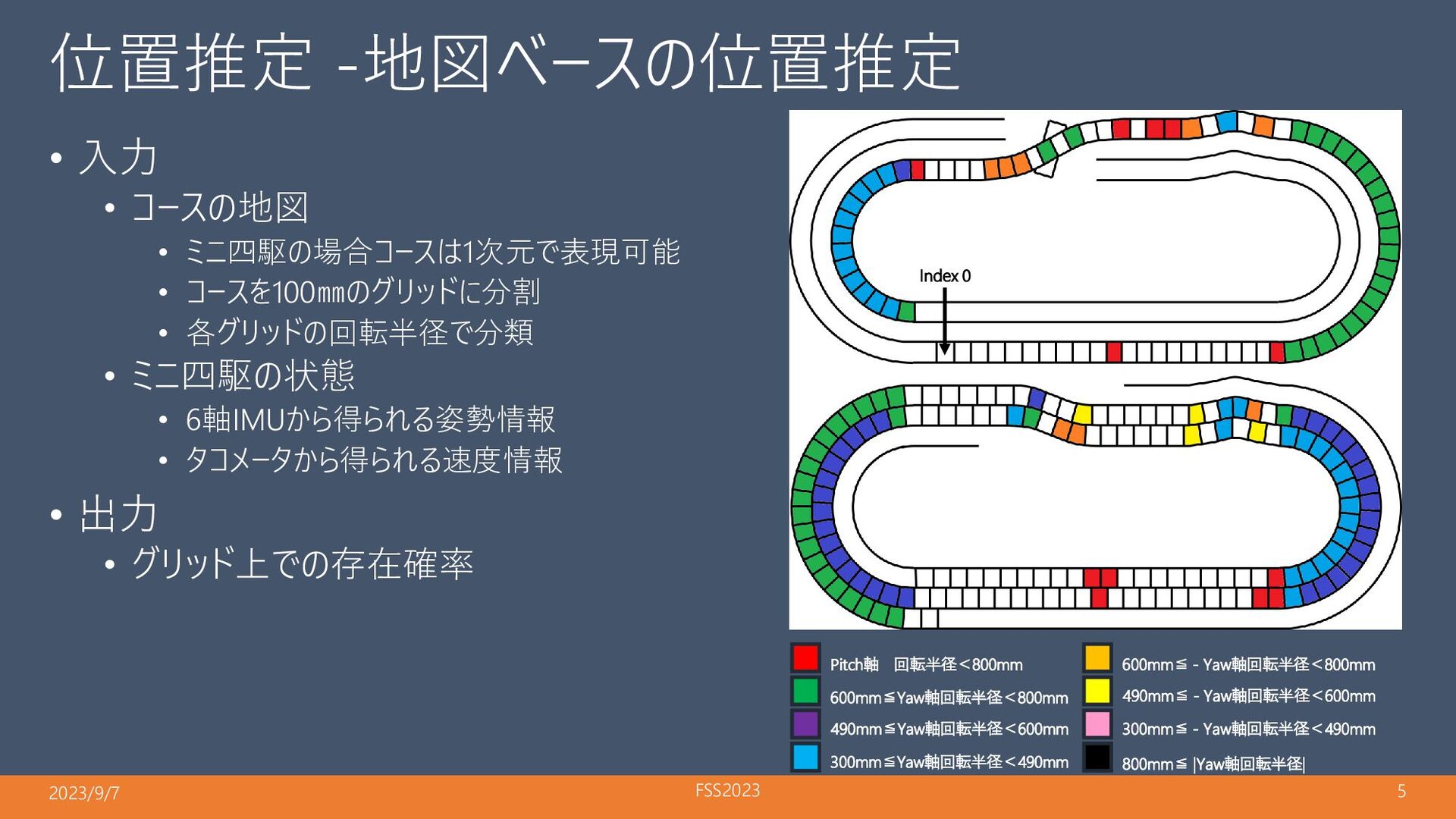
位置推定 -地図ベースの位置推定 • 入力 • コースの地図 • ミニ四駆の場合コースは1次元で表現可能 • コースを100㎜のグリッドに分割
• 各グリッドの回転半径で分類 • ミニ四駆の状態 • 6軸IMUから得られる姿勢情報 • タコメータから得られる速度情報 • 出力 • グリッド上での存在確率 Index 0 Pitch軸 回転半径<800mm 600mm≦Yaw軸回転半径<800mm 490mm≦Yaw軸回転半径<600mm 300mm≦Yaw軸回転半径<490mm 600mm≦ - Yaw軸回転半径<800mm 490mm≦ - Yaw軸回転半径<600mm 300mm≦ - Yaw軸回転半径<490mm 800mm≦ |Yaw軸回転半径| 2023/9/7 FSS2023 5
位置推定 -瞬時的な存在確率 • センサの1サンプル毎にYAW軸,PITCH軸の回転半径を計算 • コース上の何処にいる確率があるかないかが分かる • 例:300mm <Yaw軸回転半径<490mm が計測された場合
• 水色で示す各グリッドに存在する確率が3.3% • 全グリッド数:240 • 内周左カーブ数:30 2023/9/7 FSS2023 6
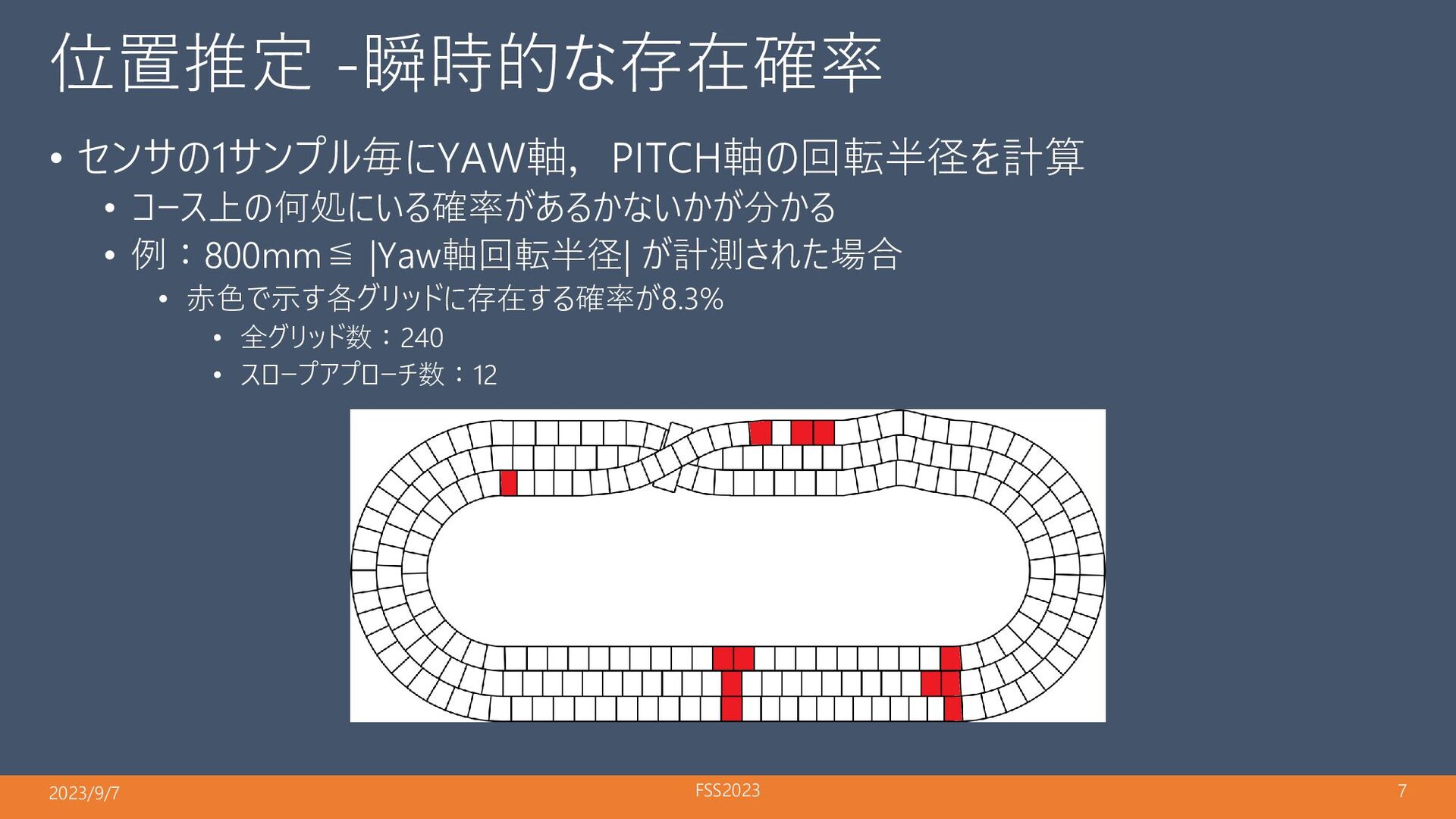
位置推定 -瞬時的な存在確率 • センサの1サンプル毎にYAW軸,PITCH軸の回転半径を計算 • コース上の何処にいる確率があるかないかが分かる • 例:800mm≦ |Yaw軸回転半径| が計測された場合
• 赤色で示す各グリッドに存在する確率が8.3% • 全グリッド数:240 • スロープアプローチ数:12 2023/9/7 FSS2023 7
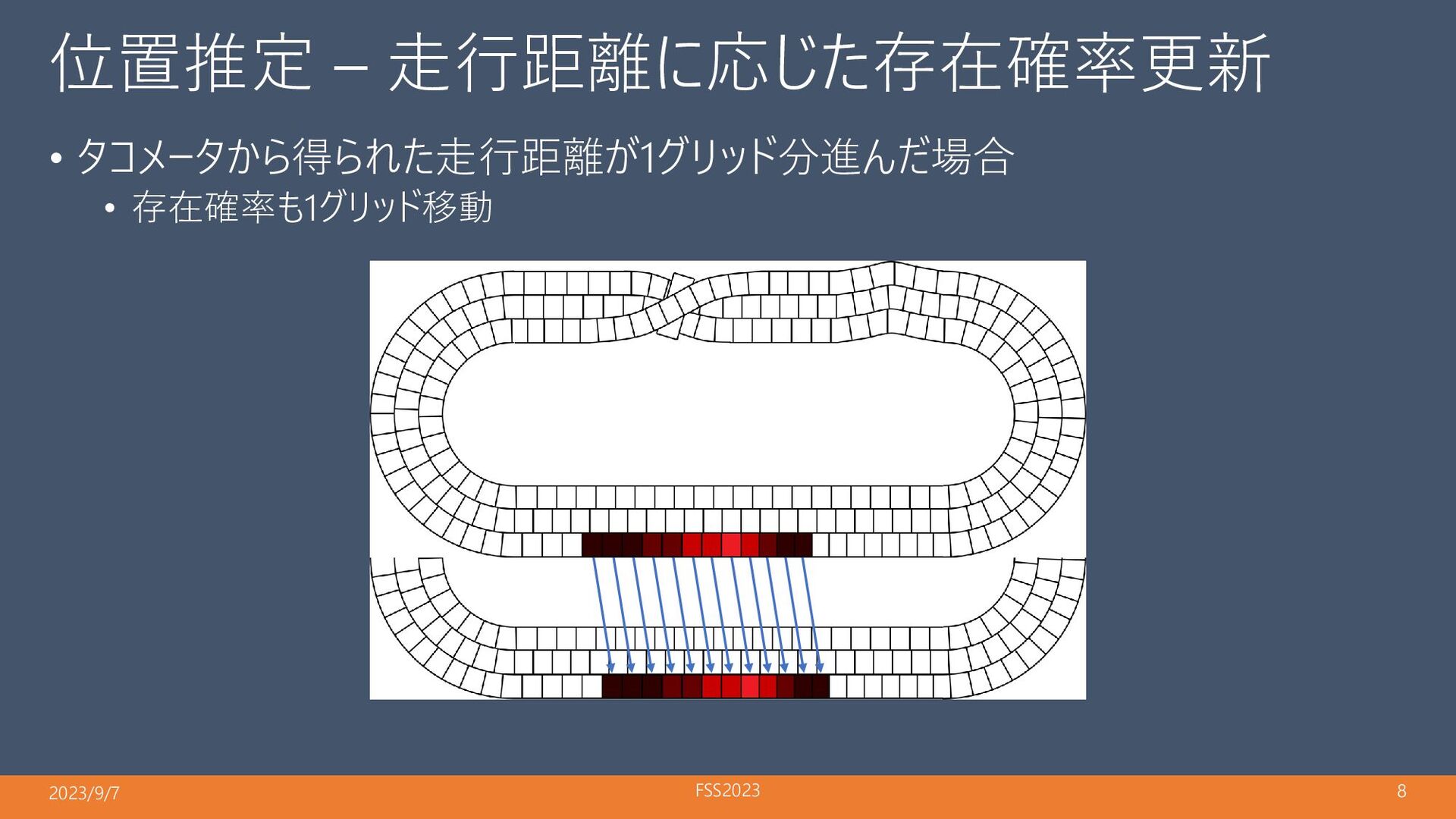
位置推定 – 走行距離に応じた存在確率更新 • タコメータから得られた走行距離が1グリッド分進んだ場合 • 存在確率も1グリッド移動 2023/9/7 FSS2023 8
位置推定 – グリッド上での存在確率 • 瞬時的な存在確率と更新された既存存在確率の重み付き和 • センサ1サンプル毎にこの計算を繰り返す • 最も存在確率が高い箇所を自己位置として解釈 •
メリット • 比較的計算コストが低い • 1ループで実装可能 • デメリット • 位置ロックまでにある程度の距離が必要 2023/9/7 FSS2023 9
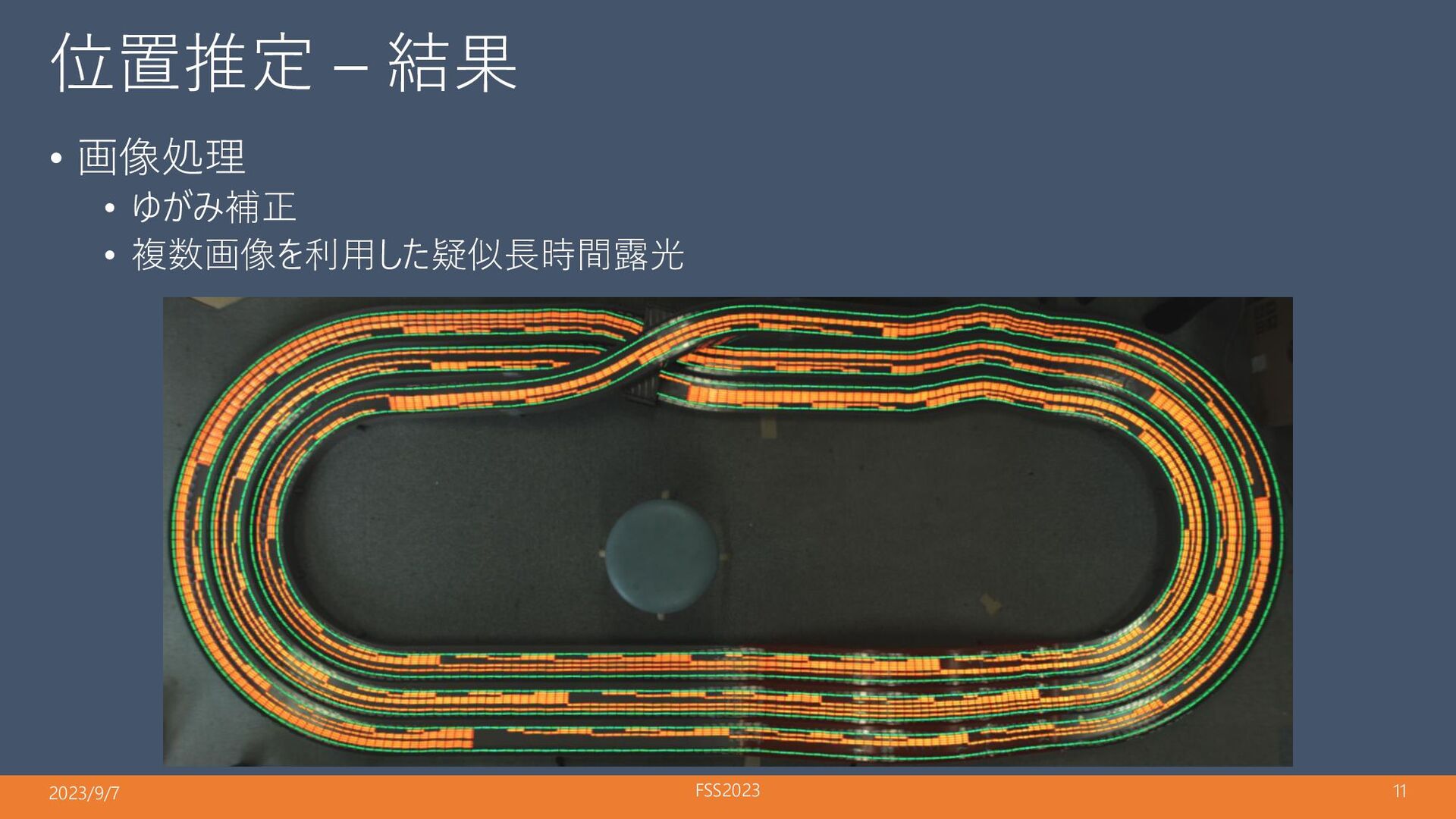
位置推定 – 実験 • コース上部からのハイスピードカメラでの撮影 • マシン上部のLED表示器にグリッド番号を表示 • バイナリコードで出力 •
時速10km/hで走行 • 100fpsで撮影 • 瞬時的な存在確率の重みを0.01に設定 2023/9/7 FSS2023 10
位置推定 – 結果 • 画像処理 • ゆがみ補正 • 複数画像を利用した疑似長時間露光 2023/9/7
FSS2023 11
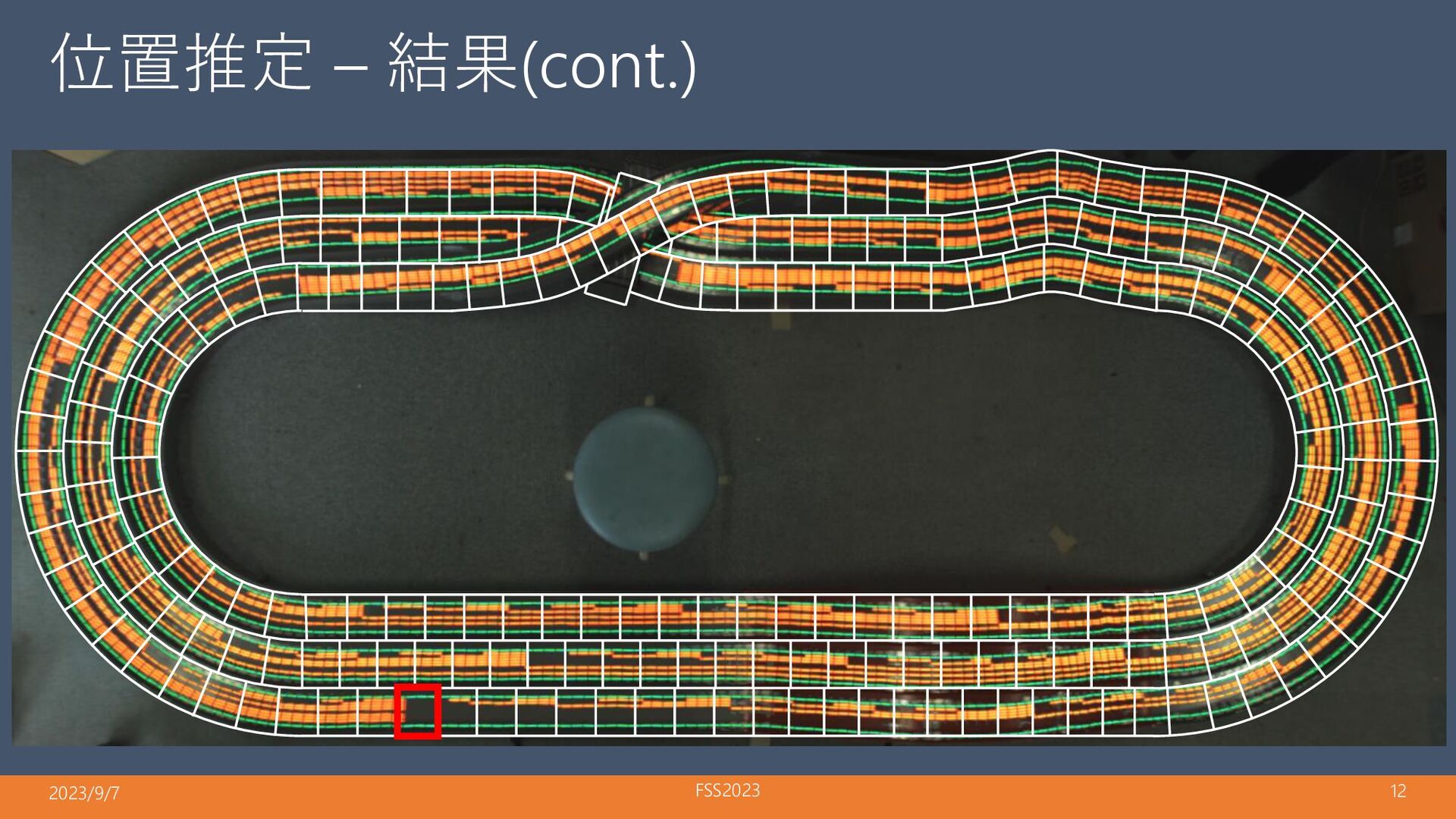
位置推定 – 結果(cont.) 2023/9/7 FSS2023 12
位置推定 – 結果(cont.) • 真値との比較 • 各グリッド番号と画像上の位置情報を照合 • グリッド内に真値が一部でも入っているかで判断 •
±50mm 46.3% • ±150mm 95.8% ±50mm以内 ±150mm以内 ±250mm以内 2023/9/7 FSS2023 13
学習による走行ルールの獲得 2023/9/7 FSS2023 14
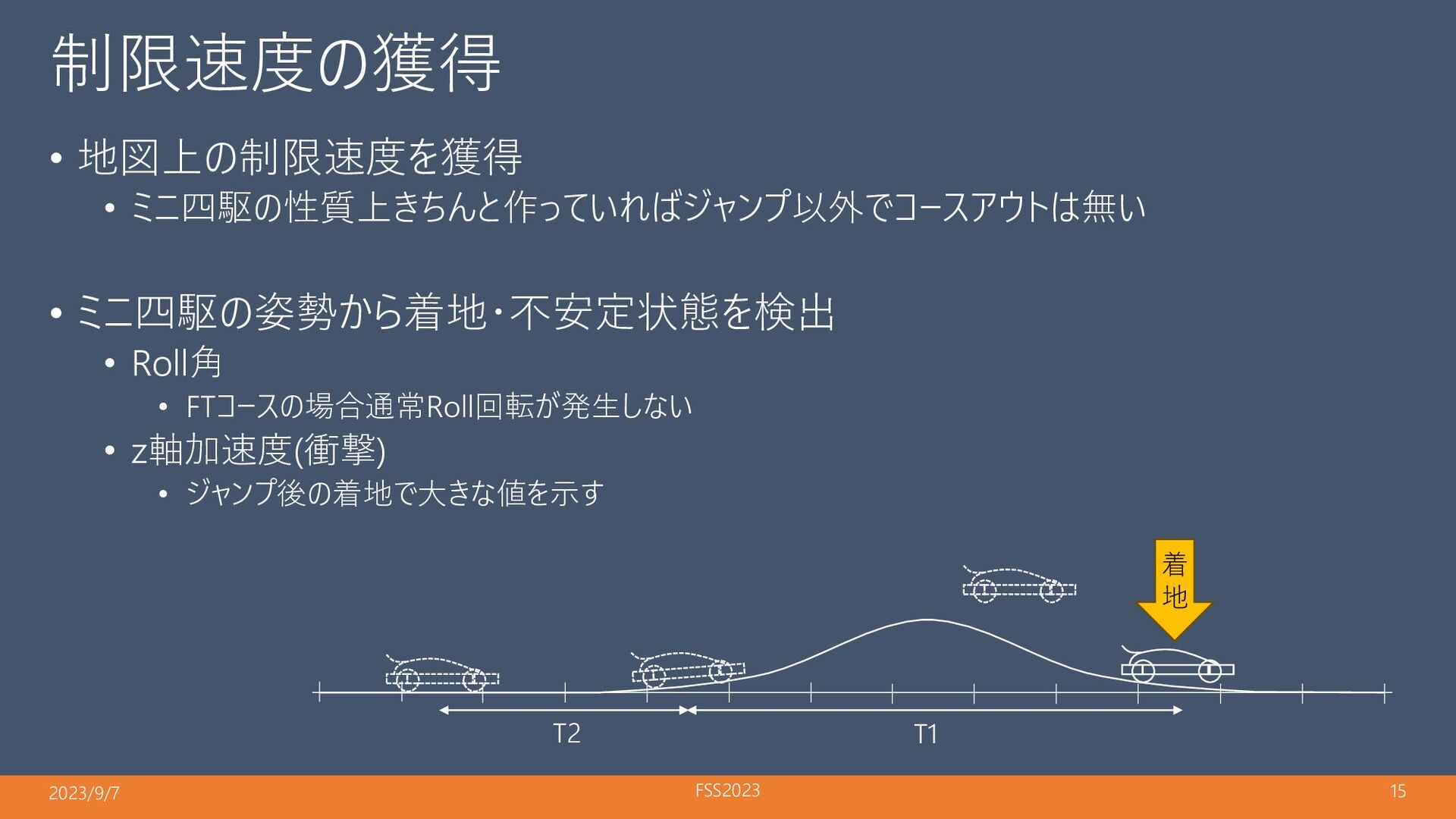
制限速度の獲得 • 地図上の制限速度を獲得 • ミニ四駆の性質上きちんと作っていればジャンプ以外でコースアウトは無い • ミニ四駆の姿勢から着地・不安定状態を検出 • Roll角 •
FTコースの場合通常Roll回転が発生しない • z軸加速度(衝撃) • ジャンプ後の着地で大きな値を示す 2023/9/7 FSS2023 15 着 地 T1 T2
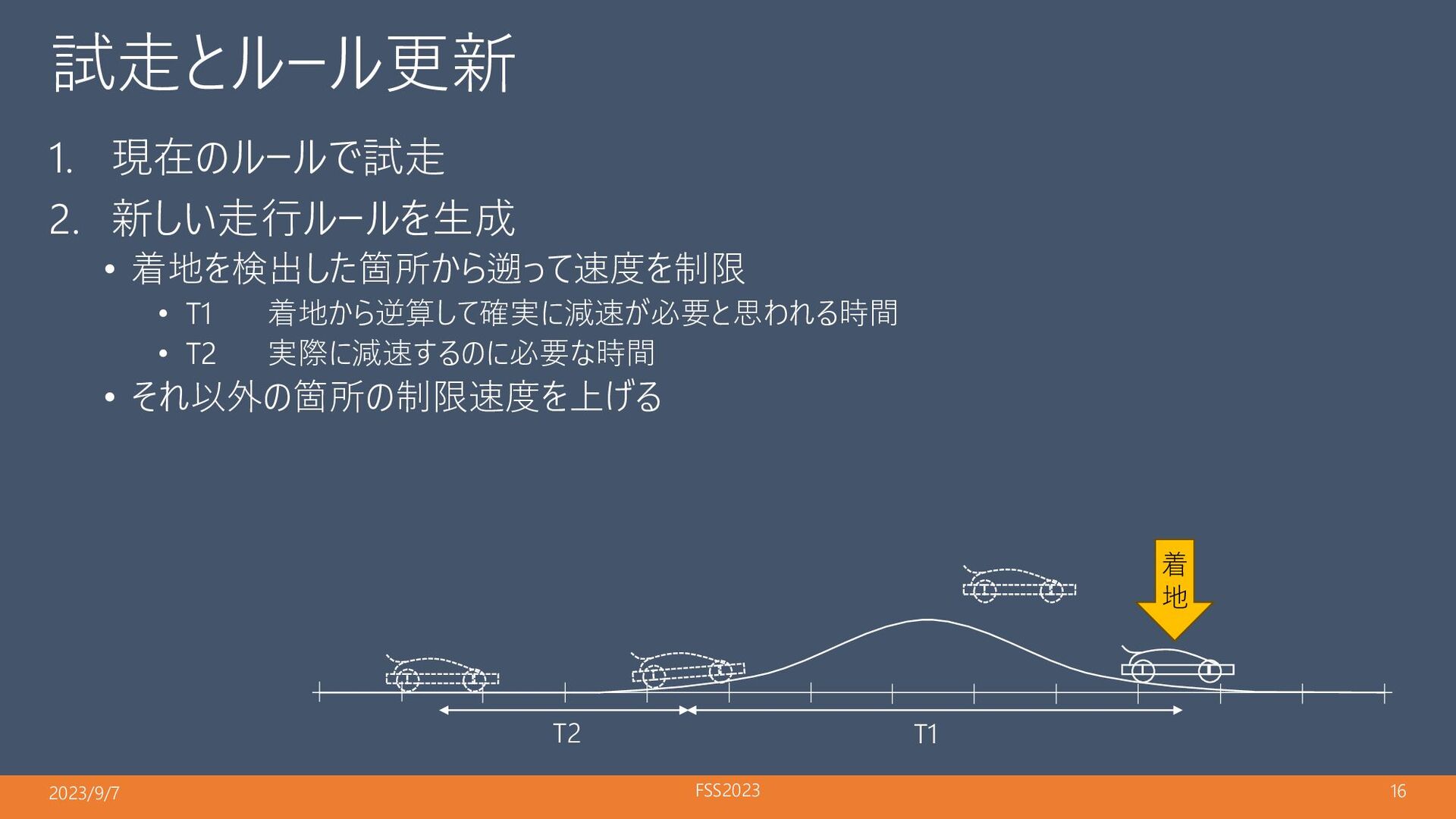
試走とルール更新 1. 現在のルールで試走 2. 新しい走行ルールを生成 • 着地を検出した箇所から遡って速度を制限 • T1 着地から逆算して確実に減速が必要と思われる時間
• T2 実際に減速するのに必要な時間 • それ以外の箇所の制限速度を上げる 2023/9/7 FSS2023 16 着 地 T1 T2
獲得したルール • 更新条件 • T1=0.4[sec], T2=0.2[sec] • 1試走毎の制限速度上昇量2km/h • 更新結果
• コース難所手前から十分な減速が得られている 2023/9/7 FSS2023 17 初期ルール 1回目更新後 2回目更新後 3回目更新後 4回目更新後 5回目更新後
結論・考察 2023/9/7 FSS2023 18
結論・考察 • 位置推定 • 安定して動作する位置推定が実現できた • 位置推定の精度を上げる事が課題 • 重み付き和の重みなど,人間が決めているパラメータの調整が必要 •
ストレート部分など,タコメータと速度の乖離が起こる場所で精度が落ちやすい • ルール獲得 • ジャンプを抑制する形でのルール獲得が実現できた • コースアウトを前提としていないことが課題 • ミニ四駆としての余力を使い切ってない • ルール更新の収束という観点がない • 制限速度を設けるだけなので,ルール更新の終点設定が出来ていない • 現在は回数で制限しているが,本来はミニ四駆の速度限界があるはず 2023/9/7 FSS2023 19
Appendix 2023/9/7 FSS2023 20
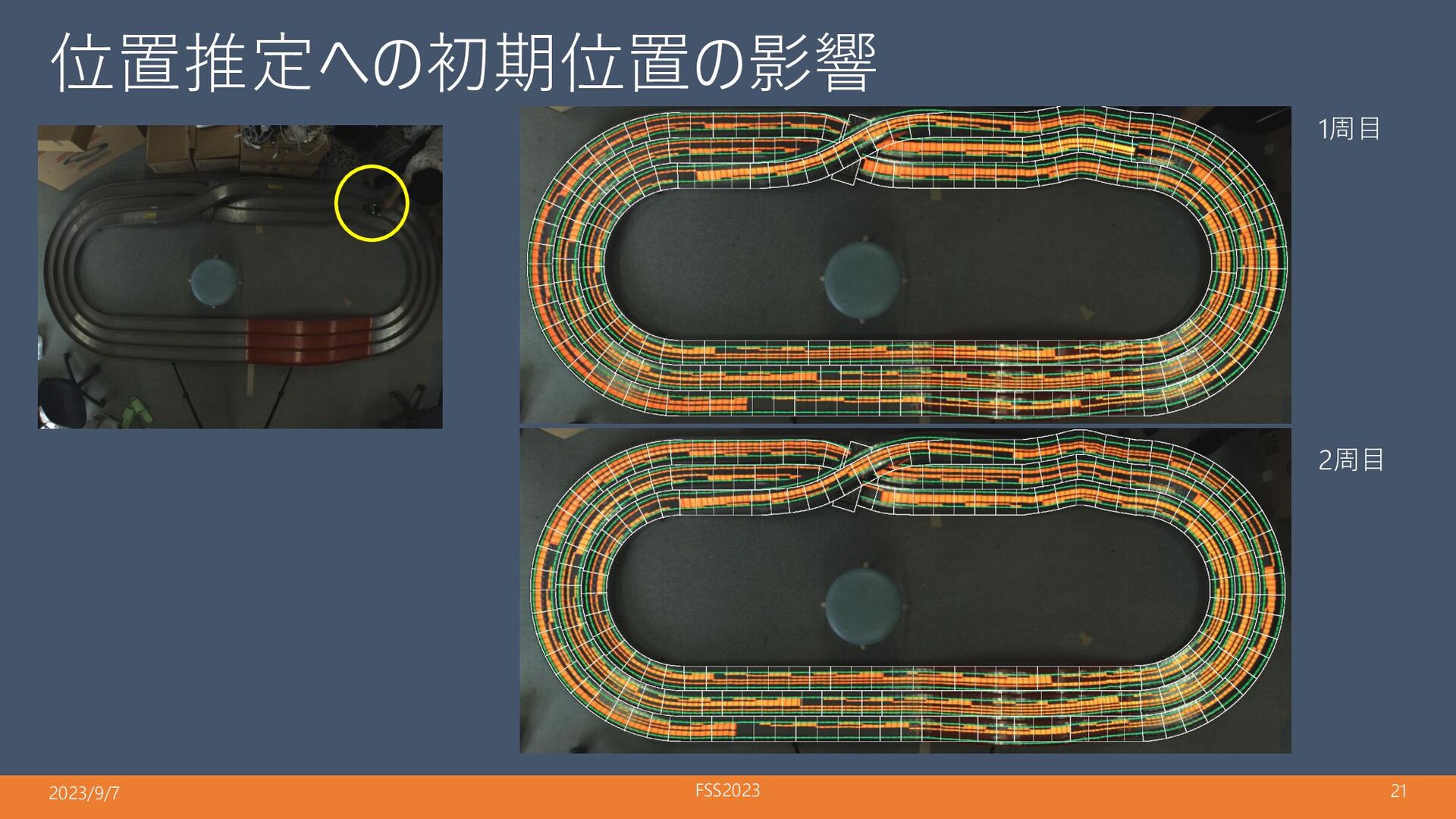
位置推定への初期位置の影響 2023/9/7 FSS2023 21 1周目 2周目
使用機材 2023/9/7 FSS2023 22 • カメラ sony XCU-CG160C • グローバルシャッタ―
• フレームレート 100fps • 解像度 1456x1088 • レンズ
• https://youtu.be/O7OeU- hMIOc?si=BhswixadYRu03Rt_ 2023/9/7 FSS2023 23
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![獲得したルール • 更新条件 • T1=0.4[sec], T2=0.2[sec] • 1試走毎の制限速度上昇量2km/h • 更新結果](https://files.speakerdeck.com/presentations/9b5fe2f1f6844ad7a991f17979dbb605/slide_16.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}