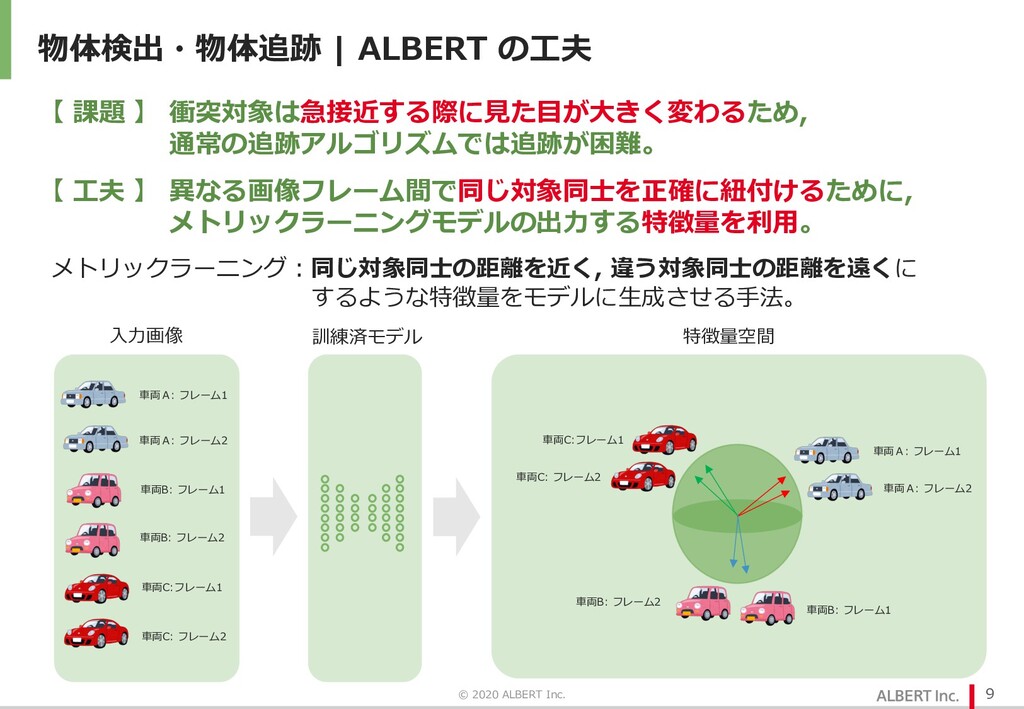
フレーム1 ⾞両B: フレーム1 ⾞両C:フレーム1 ⾞両A: フレーム2 ⾞両B: フレーム2 ⾞両C: フレーム2 特徴量空間 ⼊⼒画像 訓練済モデル メトリックラーニング︓同じ対象同⼠の距離を近く, 違う対象同⼠の距離を遠くに するような特徴量をモデルに⽣成させる⼿法。 ⾞両A: フレーム1 ⾞両A: フレーム2 ⾞両C:フレーム1 ⾞両C: フレーム2 ⾞両B: フレーム1 ⾞両B: フレーム2 【 課題 】 衝突対象は急接近する際に⾒た⽬が⼤きく変わるため, 通常の追跡アルゴリズムでは追跡が困難。 【 ⼯夫 】 異なる画像フレーム間で同じ対象同⼠を正確に紐付けるために, メトリックラーニングモデルの出⼒する特徴量を利⽤。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}