Self-Supervised Interest Point Detection and Description. CVPR 2018 Deep Learning for Visual SLAM Workshop n [2] Yurun Tian, Xin Yu, Bin Fan, Fuchao Wu, Huub Heijnen, Vassileios Balntas. SOSNet: Second Order Similarity Regularization for Local Descriptor Learning. CoRR 2019 n [3] Mihai Dusmanu, Ignacio Rocco, Tomas Pajdla, Marc Pollefeys, Josef Sivic, Akihiko Torii, Torsten Sattler. D2-Net: A Trainable CNN for Joint Detection and Description of Local Features. CVPR 2019 n [4] Zixin Luo, Tianwei Shen, Lei Zhou, Jiahui Zhang, Yao Yao, Shiwei Li, Tian Fang, Long Quan. ContextDesc: Local Descriptor Augmentation with Cross-Modality Context. CVPR 2019 n [5] Kun He, Yan Lu, Stan Sclaroff. Local Descriptors Optimized for Average Precision. CVPR 2018 n [6] Yurun Tian, Bin Fan, Fuchao Wu. L2-Net: Deep Learning of Discriminative Patch Descriptor in Euclidean Space. CVPR 2017 n [7] Mishchuk, Anastasiia, et al. Working hard to know your neighbor's margins: Local descriptor learning loss. NeurIPS 2017 24 Summary
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![DNNによる特徴点推論⼿法 12 論⽂紹介 ペアワイズ リストワイズ ContextDesc[4] DOAP[5] L2-Net[6] D2-Net[3] SuperPoint[1]](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_11.jpg){kind=link}
![SuperPoint [1] n 画像から特徴点・記述⼦を1つのネットワークで作成するモデル n 学習のために、正解データ作成がほぼ不要 Ø 簡易的な図形で正解データを⾃動⽣成し、特徴点を学習(左図) Ø 学習したモデルを利⽤して、複雑な画像の特徴点正解データを⽣成(中図)](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_12.jpg){kind=link}
![SOSNet [2] n パッチから記述⼦のみを作成するモデル n 記述⼦の学習にパッチ間の類似度を保存させる制約を加えた⼿法 Ø Triplet lossを⽤いて、ポジティブ/ネガティブの 類似度を学習](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_13.jpg){kind=link}
![D2-Net [3] n 画像から特徴点・記述⼦を1つのネットワークで作成 n これまでの⼿法(ex. SuperPoint) Ø 特徴点・記述⼦は別々に⽣成 Ø](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_14.jpg){kind=link}
![ContextDesc [4] n 画像から特徴点ごとの記述⼦を作成するモデル Ø 3種類の経路から個別に記述⼦を作成する p Geometric context︓特徴点の分布情報から記述⼦を作成 p](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_15.jpg){kind=link}
![DOAP [5] n パッチから記述⼦のみを作成するモデル n 予測結果の順序を評価するAverage Precisionを最⼤化 Ø Average Precisionは上位の予測結果が正解かを重視した評価指標](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_16.jpg){kind=link}
![L2-Net [6] n パッチから記述⼦のみを作成するモデル Ø ネガティブの類似度に対するポジティブの類似度⽐率を⽤いるリストワイズ型 Ø ネガティブに対するポジティブの割合を1に近づけるように学習 18 論⽂紹介](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_17.jpg){kind=link}
![HardNet [7] n パッチから記述⼦のみを予測するモデル n 対象パッチに対して、「ポジティブ」と「分離が難しいネガティブ」のパッチを学習 p 学習ではtriplet lossを利⽤ p](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_18.jpg){kind=link}
{kind=link}
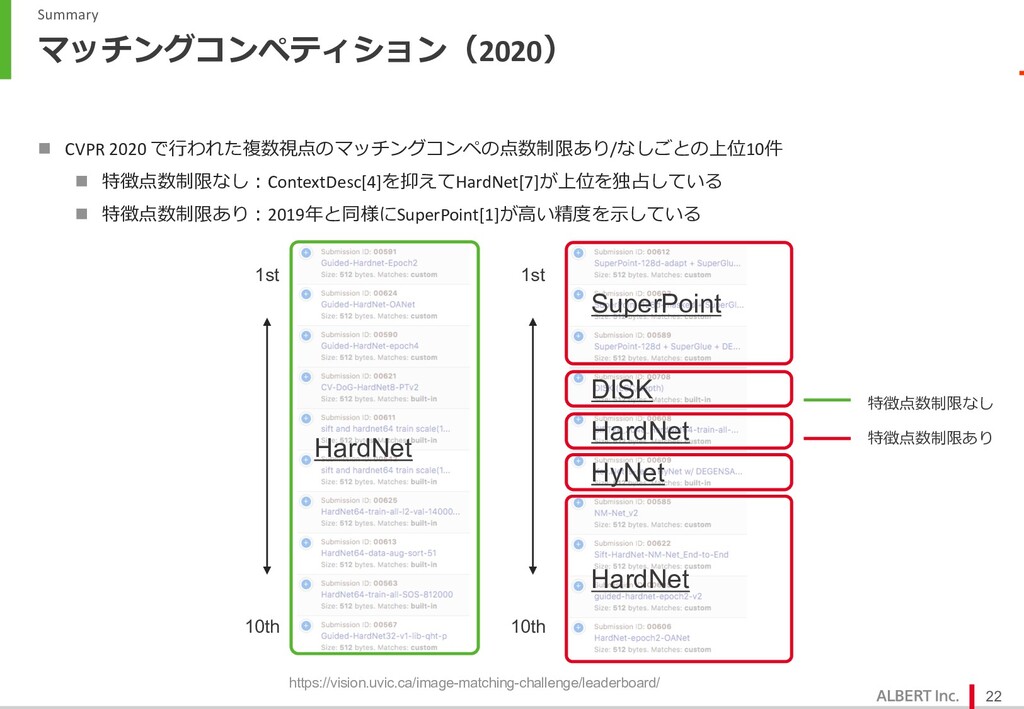
![マッチングコンペティション(2019) n CVPR 2019 で⾏われた複数視点のマッチングコンペの上位20件 n 特徴点数制限なし︓ContextDesc[4]が⾼い精度を出しており、D2-Net[3]が続いている n 特徴点数制限あり︓SuperPoint[1]が⾼精度を独占している 21](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_20.jpg){kind=link}
{kind=link}
{kind=link}
![参考⽂献 n [1] Daniel DeTone, Tomasz Malisiewicz, Andrew Rabinovich. SuperPoint:](https://files.speakerdeck.com/presentations/a469db8241d94f5e8940c2f21bcefe2f/slide_23.jpg){kind=link}