1 r 2 r 3 r 4 クロック 誤差s 1点で交わらない 擬似距離 s s s ( ) ( ) ( ) 1 2 1 2 1 2 1 r c s z z y y x x = + − + − + − ( ) ( ) ( ) 2 2 2 2 2 2 2 r c s z z y y x x = + − + − + − ( ) ( ) ( ) 3 2 3 2 3 2 3 r c s z z y y x x = + − + − + − ( ) ( ) ( ) 4 2 4 2 4 2 4 r c s z z y y x x = + − + − + −
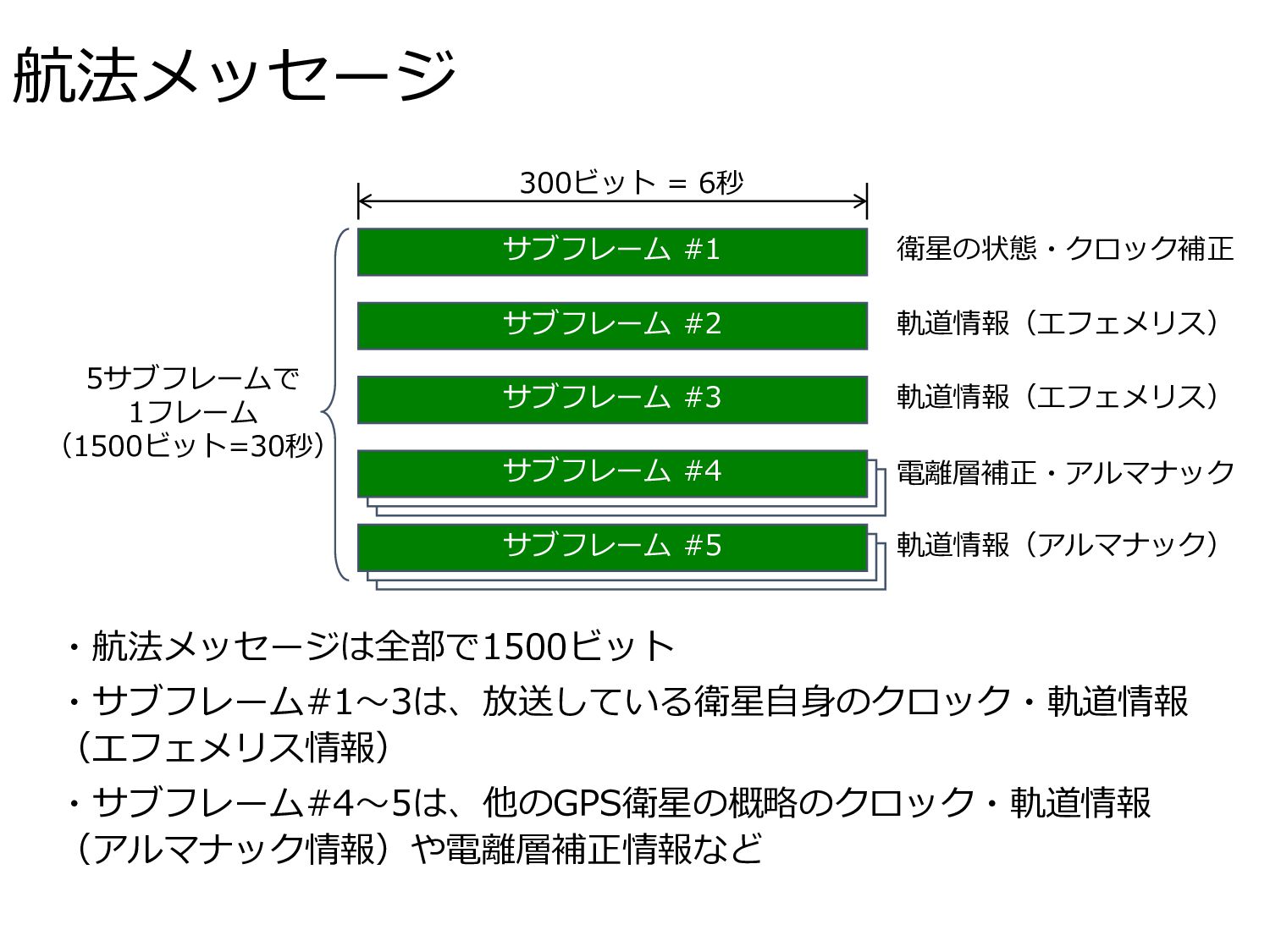
a f2 M 0 W0 w i 0 Dn e ビット数 16 16 22 16 8 32 32 32 32 16 32 内容 エポック時刻 エポック時刻 クロック補正 クロック補正 クロック補正 平均近点角 昇交点赤経 近地点引数 軌道傾斜角 補正値 離心率 項目 sqrt A dot W dot i C rc C rs C uc C us C ic C ic 合計 ビット数 32 24 14 16 16 16 16 16 16 420 内容 軌道長半径 Wの変化率 iの変化率 補正値 補正値 補正値 補正値 補正値 補正値 位置計算に使用するクロック・軌道の情報
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}