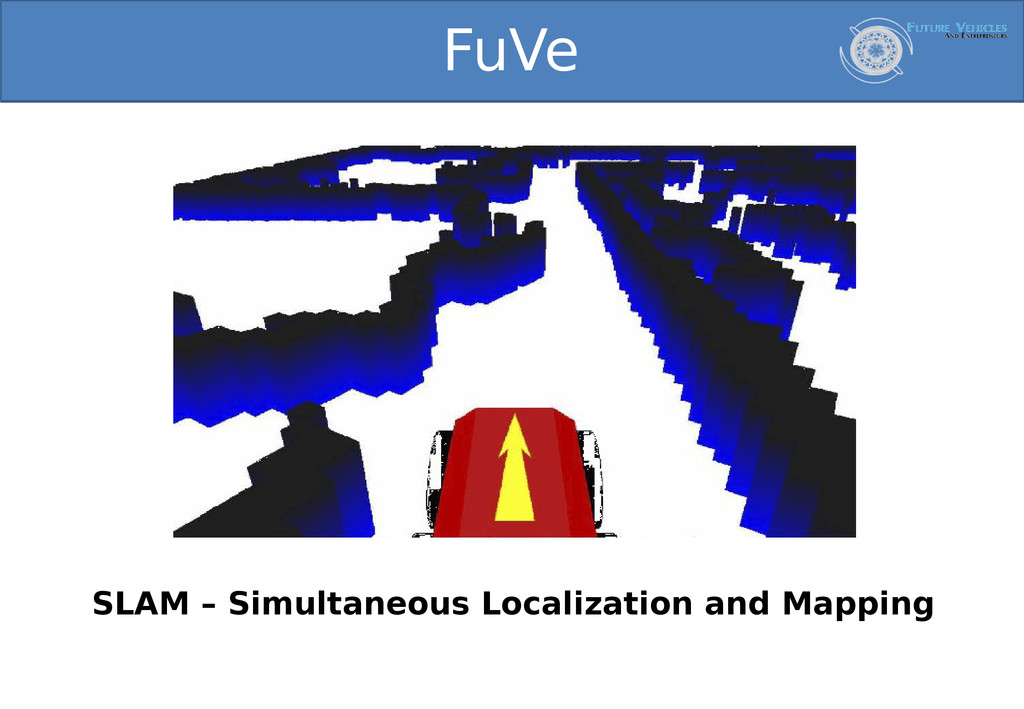
solamente un concurso sino para ser una plataforma Sistema de Propulsión innovadora Sistema de Visión Artificial Estereoscópica (3D) SLAM (3D) Torpedos inteligentes (autoguiados)
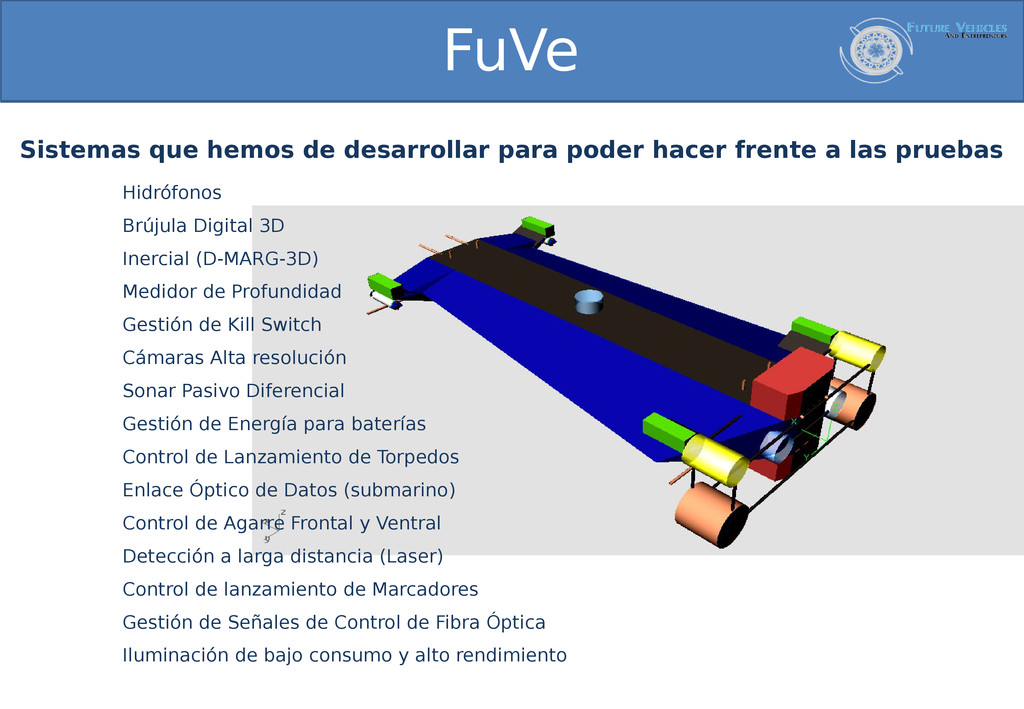
a las pruebas Hidrófonos Brújula Digital 3D Inercial (D-MARG-3D) Medidor de Profundidad Gestión de Kill Switch Cámaras Alta resolución Sonar Pasivo Diferencial Gestión de Energía para baterías Control de Lanzamiento de Torpedos Enlace Óptico de Datos (submarino) Control de Agarre Frontal y Ventral Detección a larga distancia (Laser) Control de lanzamiento de Marcadores Gestión de Señales de Control de Fibra Óptica Iluminación de bajo consumo y alto rendimiento
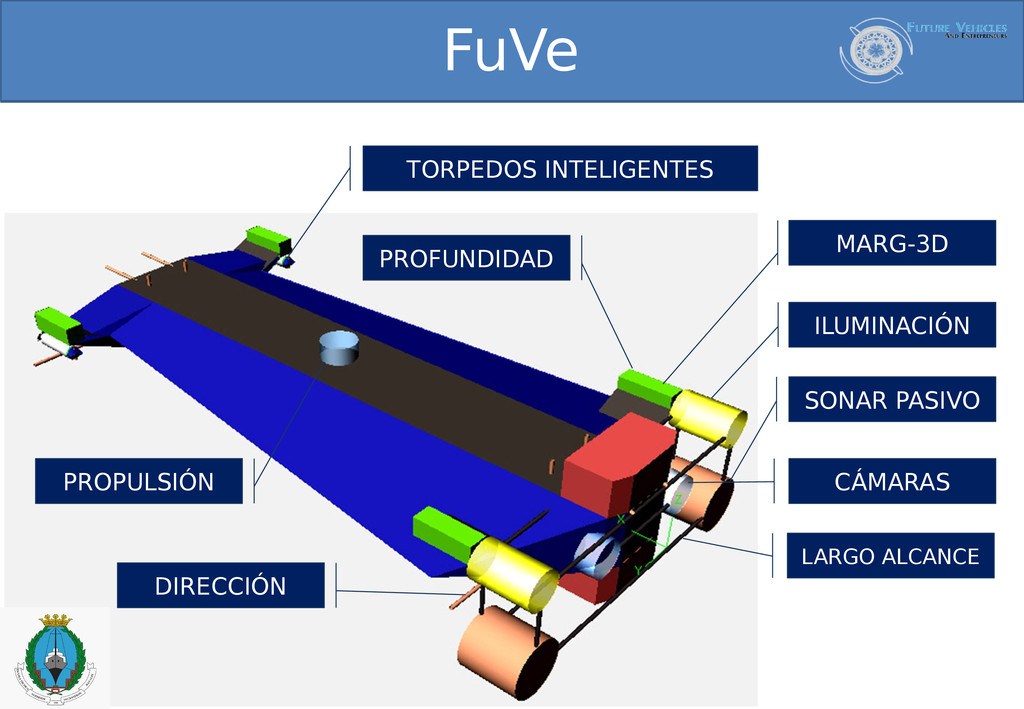
Programable • Inteligencia Artificial • Visión Artificial • Auto-guiado SISTEMAS • 3 servos de control de dirección • Gestión de energía de baterías • Cámara alta resolución 30fps • D-MARG-3D • 1 m/s crucero • Brújula Digital 3D • Enlace Óptico de Datos • Medidor de Profundidad • Autonomía de 30 minutos
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}