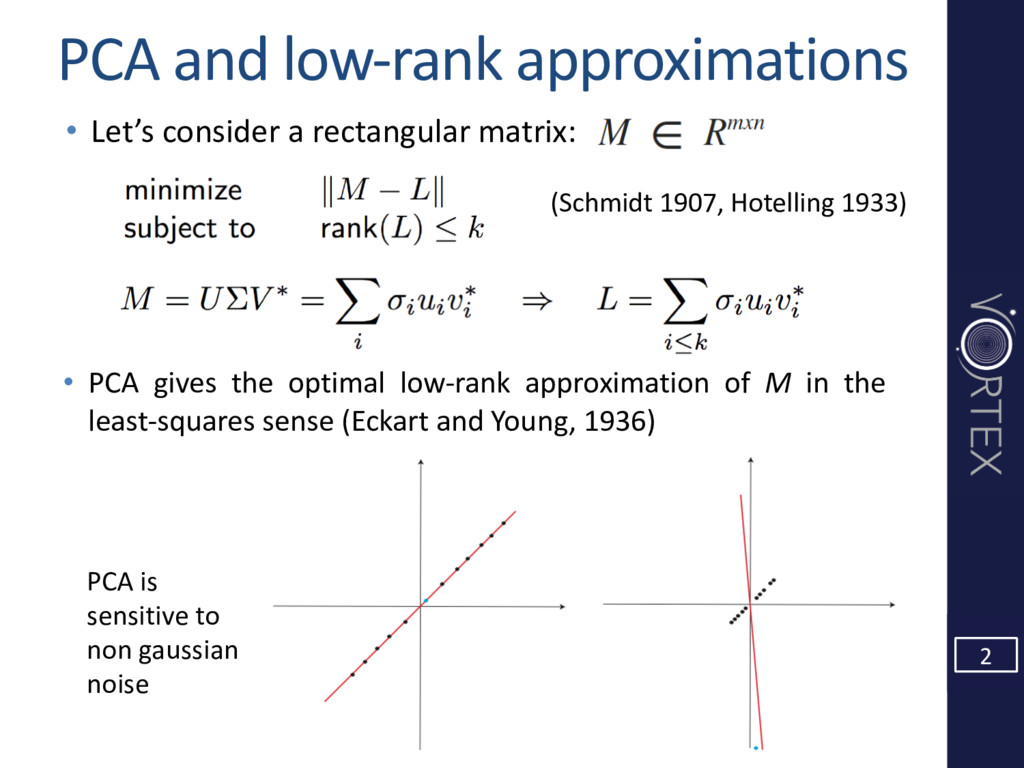
low-rank approximation of M in the least-squares sense (Eckart and Young, 1936) PCA is sensitive to non gaussian noise (Schmidt 1907, Hotelling 1933) • Let’s consider a rectangular matrix:
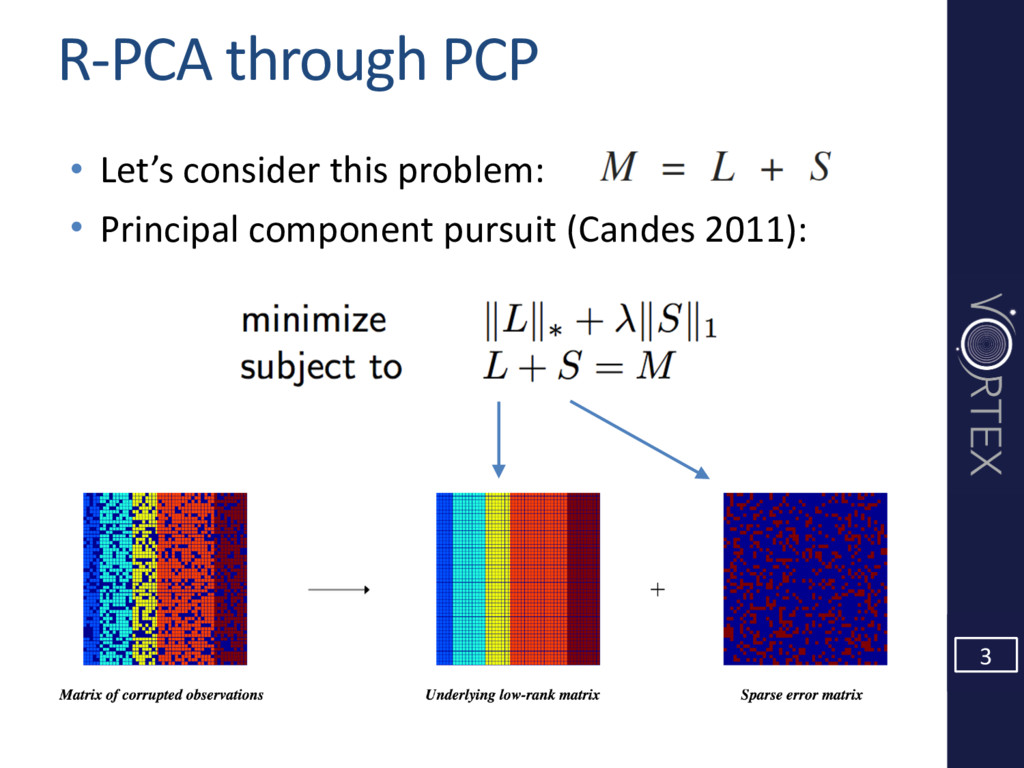
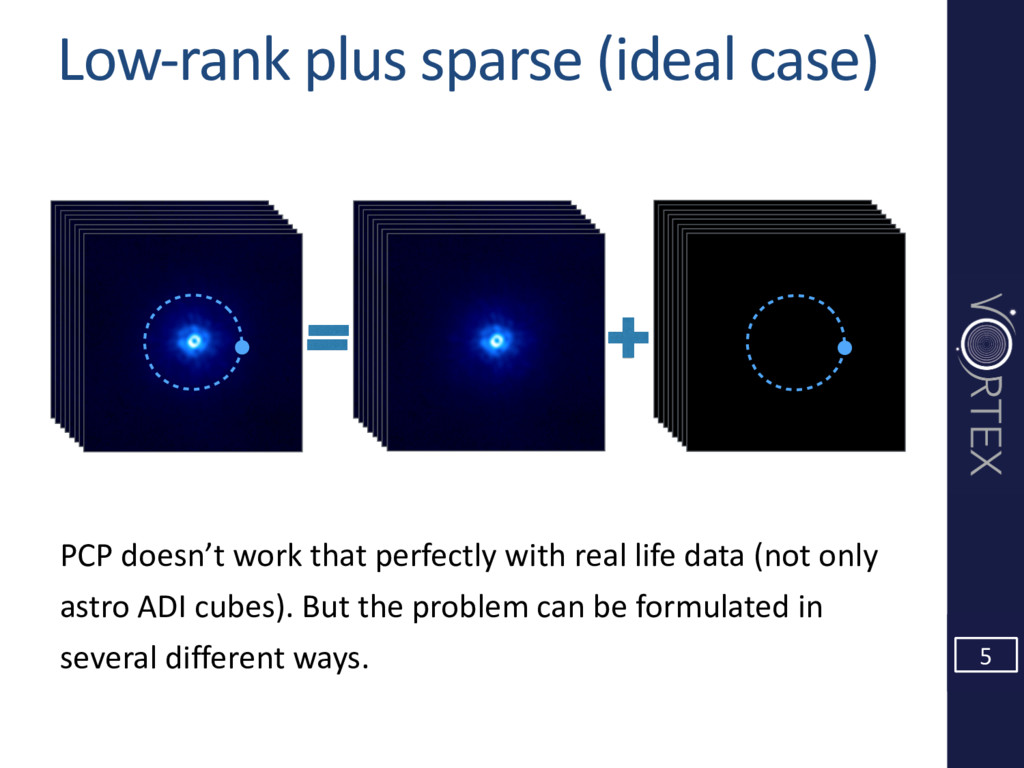
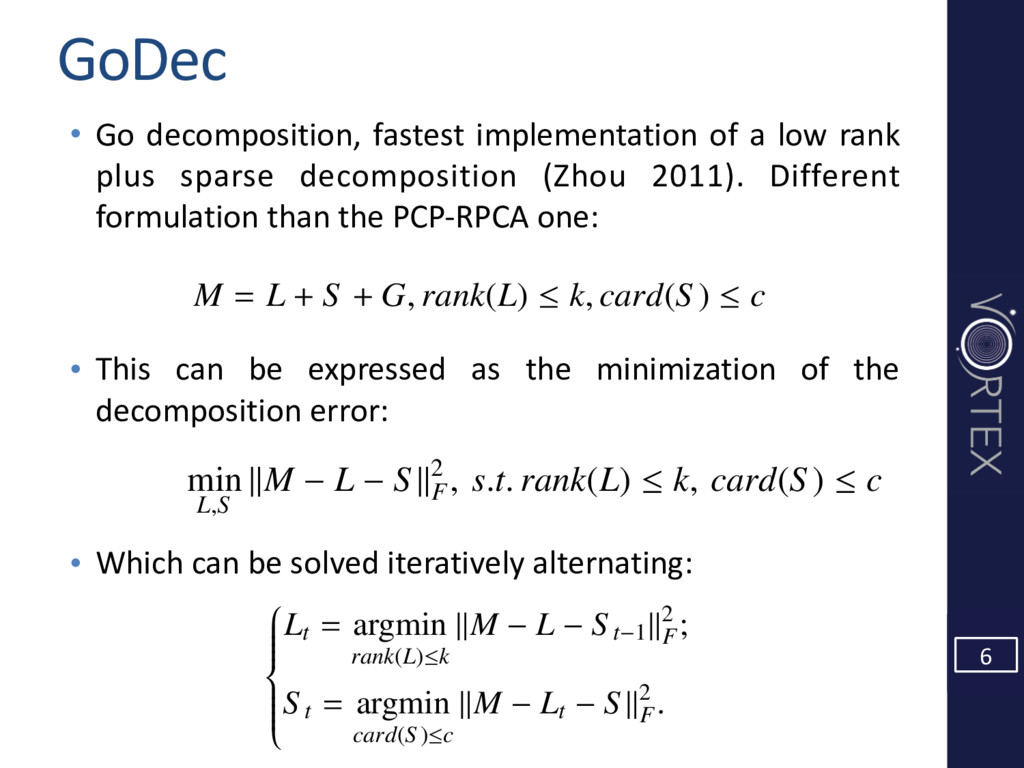
plus sparse decomposition (Zhou 2011). Different formulation than the PCP-RPCA one: • This can be expressed as the minimization of the decomposition error: • Which can be solved iteratively alternating: 6 sition. Among this approaches we find the approximated RP algorithm: GoDec (Zhou & Tao 2011b). This convenient, in terms of computational cost, appro mated approach to the decomposition of M proposes a thr member decomposition (instead of the typical low-rank p sparse one): M = L + S + G , rank ( L ) k , card ( S ) c , where G is a dense noise component. GoDec produces an proximated decomposition of M , whose exact low-rank p sparse decomposition does not exist due to additive noise restricting rank ( L ) and the cardinality of S in order to con model complexity. This three-member decomposition can be pressed as the minimization of the decomposition error: min L , S k M L S k2 F , s . t . rank ( L ) k , card ( S ) c . M = L + S + G , rank ( L ) k , card ( S ) c , where G is a dense noise component. GoDec produces an proximated decomposition of M , whose exact low-rank sparse decomposition does not exist due to additive nois restricting rank ( L ) and the cardinality of S in order to co model complexity. This three-member decomposition can b pressed as the minimization of the decomposition error: min L , S k M L S k2 F , s . t . rank ( L ) k , card ( S ) c . us sparse means in the ideal case that the background, speckle noise and residual starli ll stay in the sparse component. of arbitrarily large and k L k⇤ denotes lues. The nuclear ns of rank ( L ) and ractable approxi- on recovers under components that eground outliers. The optimization problem of (1) is solved by altern solving the following two subproblems until convergence 8 > > > > > < > > > > > : Lt = argmin rank ( L ) k k M L S t 1 k2 F ; S t = argmin card ( S ) c k M Lt S k2 F .
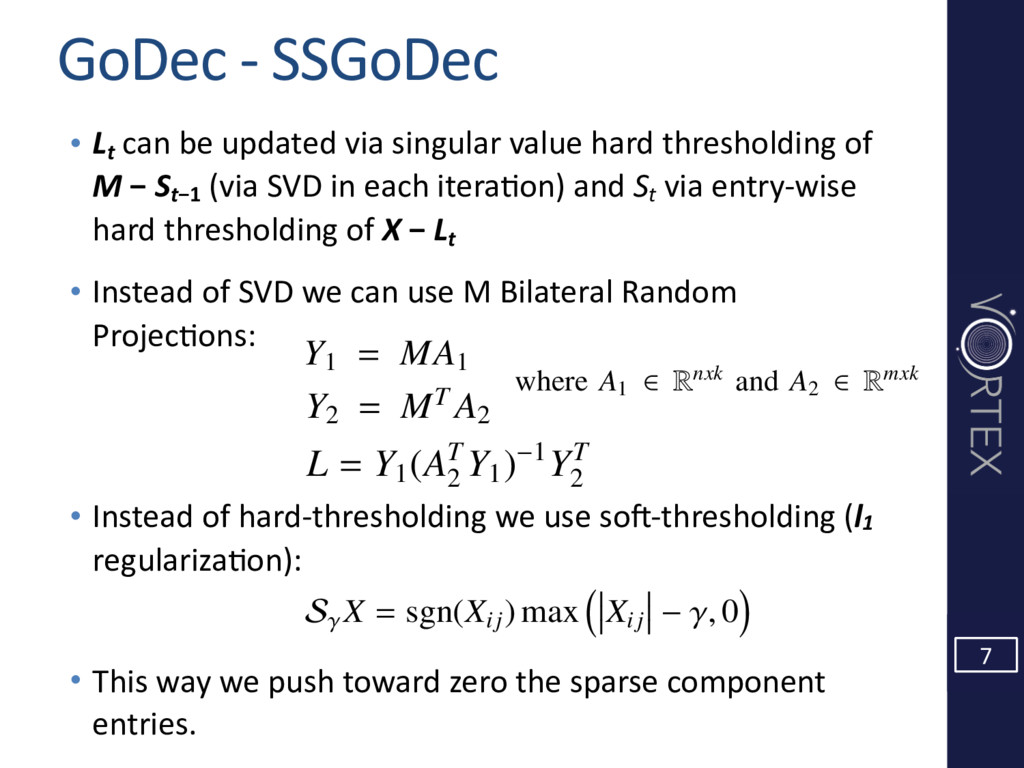
value hard thresholding of M − St−1 (via SVD in each iteracon) and St via entry-wise hard thresholding of X − Lt • Instead of SVD we can use M Bilateral Random Projeccons: • Instead of hard-thresholding we use sof-thresholding (l1 regularizacon): • This way we push toward zero the sparse component entries. 7 of multiple companions, as the subtracted from the data (espe- or bright speckles could turn into ly this type of three-member de- the geometrical structure of the singular value thresholding for e low-rank of M we make use ions (BRP, Zhou & Tao 2011a). w-rank approximation technique random projections, Y1 = MA1 Rnxk and A2 2 Rmxk are random ximation of M is computed as: ximated L requires less floating- d approximation. The bounds of P are close to the error of SVD itions (Zhou & Tao 2011a). gether to build an ADI post- are di↵erent rix decompo- mated RPCA ost, approxi- oses a three- ow-rank plus duces an ap- ow-rank plus tive noise G , der to control on can be ex- error: ages is problematic in presence of multiple compan dimmest one could get severely subtracted from the cially for close-in companions) or bright speckles cou false positives. We therefore apply this type of three-m composition locally exploiting the geometrical struc ADI datasets. Instead of using singular value thres computing on each iteration the low-rank of M w of its Bilateral Random Projections (BRP, Zhou & T BRP is a fast randomized low-rank approximation which uses M ’s left and right random projections, and Y2 = MT A2 where A1 2 Rnxk and A2 2 Rmxk matrices. Then the rank- k approximation of M is com L = Y1 ( AT 2 Y1 ) 1 YT 2 The computation of this approximated L requires le point operations than SVD based approximation. Th the approximation error in BRP are close to the er approximation under mild conditions (Zhou & Tao 2 These ideas were put together to build an roximated RPCA nal cost, approxi- proposes a three- al low-rank plus produces an ap- ct low-rank plus additive noise G , n order to control osition can be ex- ion error: cially for close-in companions) or bright speckle false positives. We therefore apply this type of th composition locally exploiting the geometrical ADI datasets. Instead of using singular value computing on each iteration the low-rank of of its Bilateral Random Projections (BRP, Zho BRP is a fast randomized low-rank approxim which uses M ’s left and right random project and Y2 = MT A2 where A1 2 Rnxk and A2 2 R matrices. Then the rank- k approximation of M L = Y1 ( AT 2 Y1 ) 1 YT 2 The computation of this approximated L requi point operations than SVD based approximatio the approximation error in BRP are close to t approximation under mild conditions (Zhou & These ideas were put together to build processing algorithm for boosting point-like s nds on the postulation CP, there are di↵erent parse matrix decompo- e approximated RPCA tational cost, approxi- f M proposes a three- typical low-rank plus , oDec produces an ap- e exact low-rank plus e to additive noise G , S in order to control composition can be ex- position error: ( S ) c . (1) Restricting the cardinality of X Lt operating on the whole ages is problematic in presence of multiple companions, as dimmest one could get severely subtracted from the data (es cially for close-in companions) or bright speckles could turn i false positives. We therefore apply this type of three-member composition locally exploiting the geometrical structure of ADI datasets. Instead of using singular value thresholding computing on each iteration the low-rank of M we make of its Bilateral Random Projections (BRP, Zhou & Tao 2011 BRP is a fast randomized low-rank approximation techni which uses M ’s left and right random projections, Y1 = M and Y2 = MT A2 where A1 2 Rnxk and A2 2 Rmxk are rand matrices. Then the rank- k approximation of M is computed a L = Y1 ( AT 2 Y1 ) 1 YT 2 The computation of this approximated L requires less floati point operations than SVD based approximation. The bound the approximation error in BRP are close to the error of S approximation under mild conditions (Zhou & Tao 2011a). These ideas were put together to build an ADI p processing algorithm for boosting point-like source detecti The algorithm follows four main steps: S and k L k⇤ denotes values. The nuclear ions of rank ( L ) and ly tractable approxi- ation recovers under rse components that foreground outliers. high computational omponent is exactly ctly sparse, contrary n corrupted by noise ouwmans & Zahzah ch decomposition to would be captured moving planets (re- parse component as presence of speckle ow-rank plus sparse dim planets. oposed to address its background subtrac- solving the following two subproblems until converge 8 > > > > > < > > > > > : Lt = argmin rank ( L ) k k M L S t 1 k2 F ; S t = argmin card ( S ) c k M Lt S k2 F . In (2) Lt can be updated via singular value hard th of M S t 1 (via SVD in each iteration) and S t via hard thresholding of X Lt . It must be noted that sing hard thresholding is equivalent to the truncation of the principal components in the PCA low-rank approxim cardinality constraint can be modified by introducing larization which induces soft-thresholding in updatin & Tao 2013). The soft-thresholding operator S with applied on the elements of a matrix X can be expres S X = sgn( Xi j ) max ⇣ Xi j , 0 ⌘ 3. Local randomized fast low-rank plus spa decomposition of ADI datasets
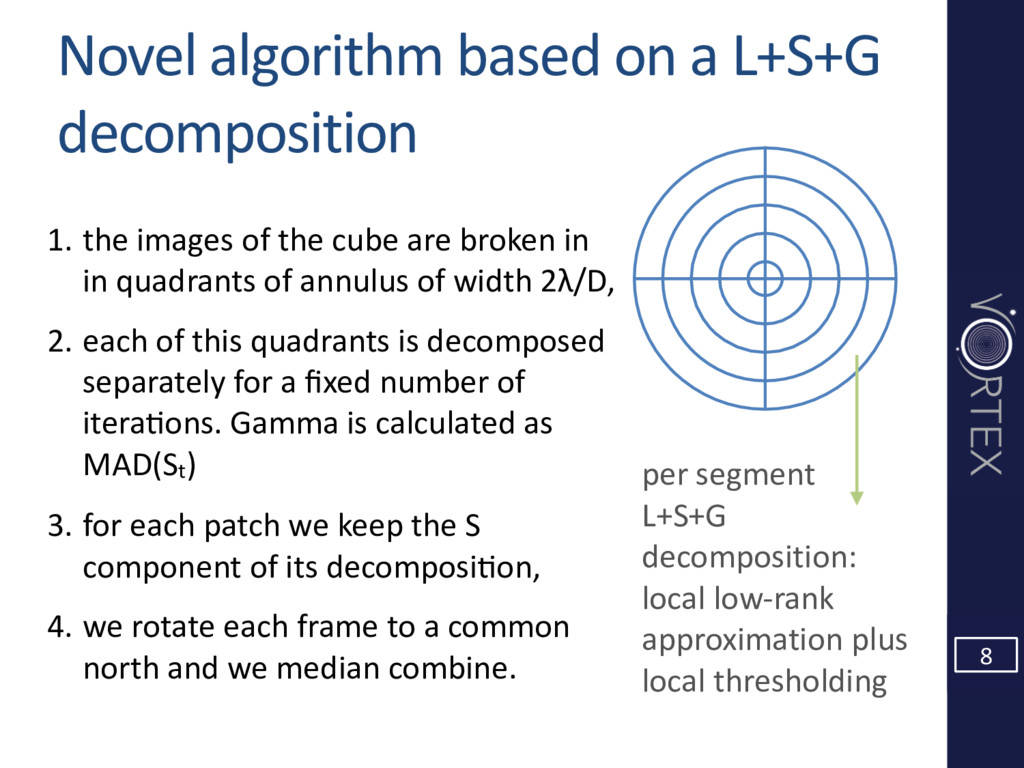
L+S+G decomposition: local low-rank approximation plus local thresholding 1. the images of the cube are broken in in quadrants of annulus of width 2λ/D, 2. each of this quadrants is decomposed separately for a fixed number of iteracons. Gamma is calculated as MAD(St) 3. for each patch we keep the S component of its decomposicon, 4. we rotate each frame to a common north and we median combine.
per cube). 50% chance of injection • PCA and our algorithm post-proc • Detection threshold on SNR is varied, changes the decision of the classifier • We count true positives and false positives to get the TPR and FPR for each threshold 2,4,6,8,10,14 • Tools available in signal detection theory and machine learning • Receiver operating characteristic (ROC) curves
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}