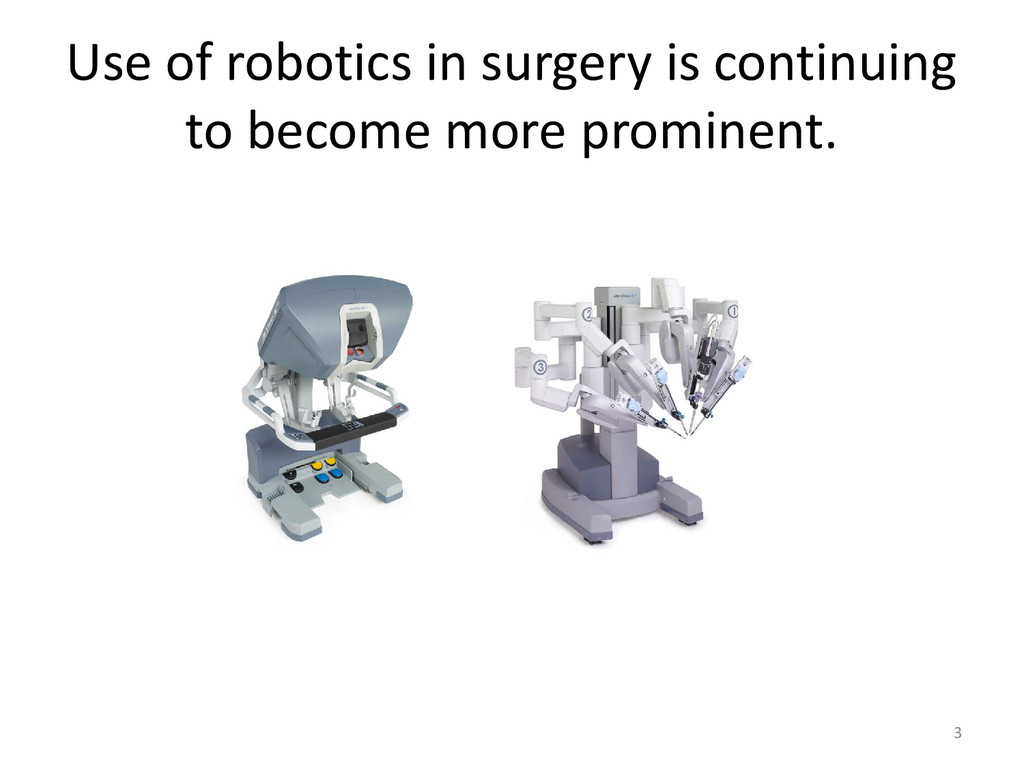
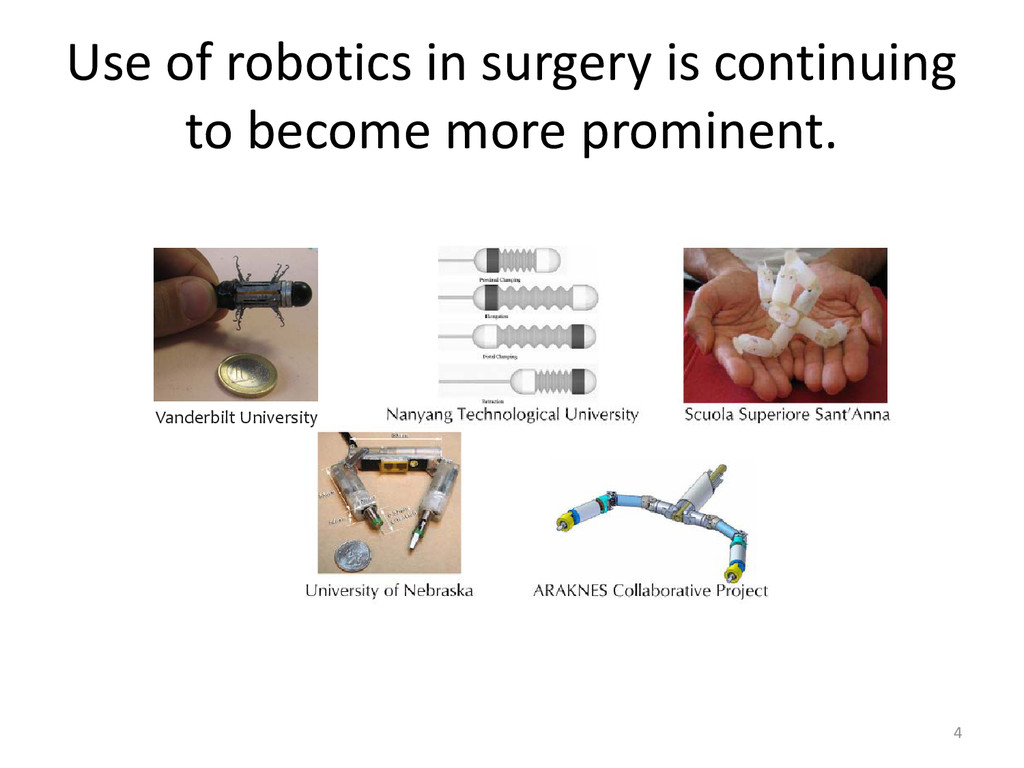
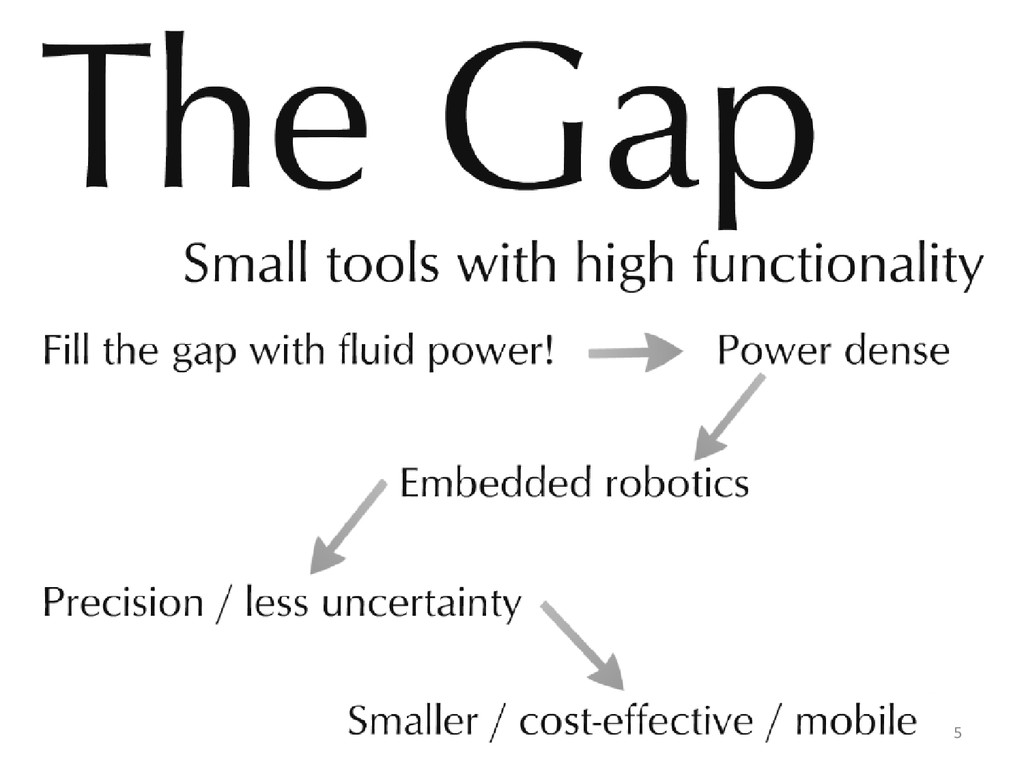
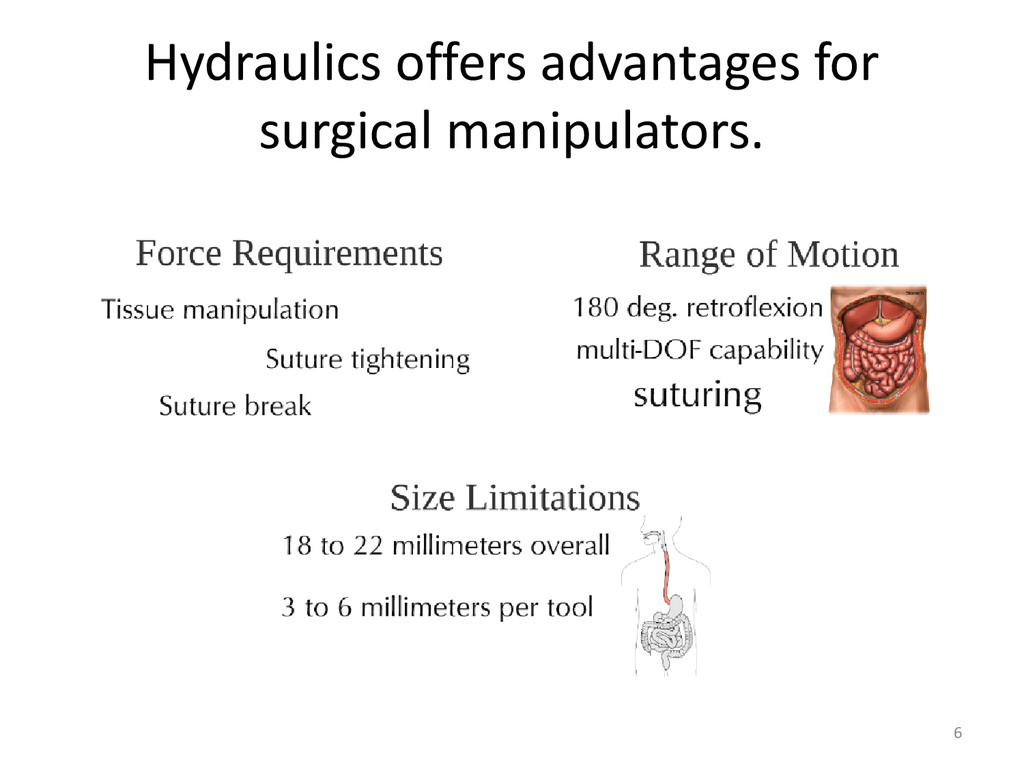
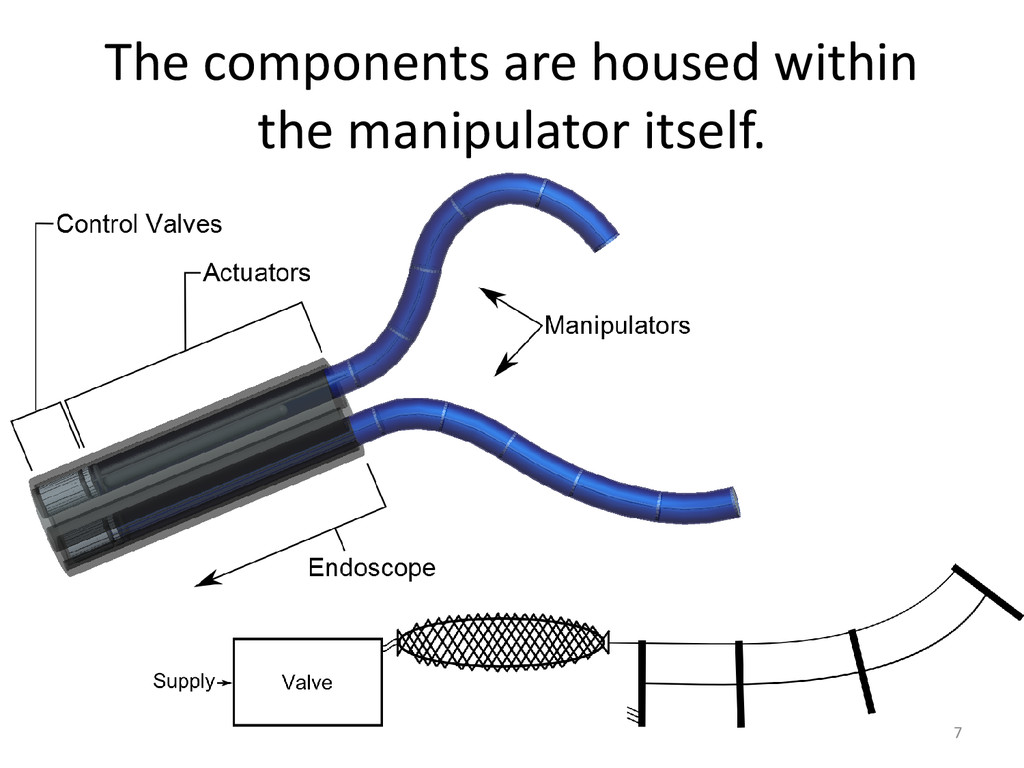
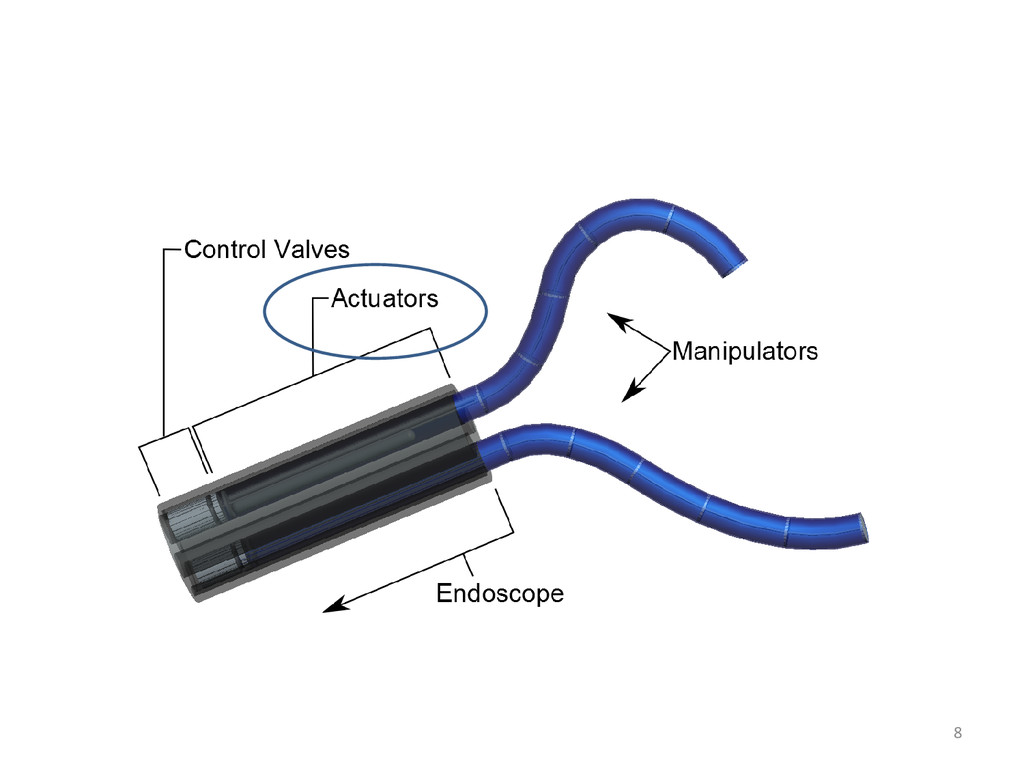
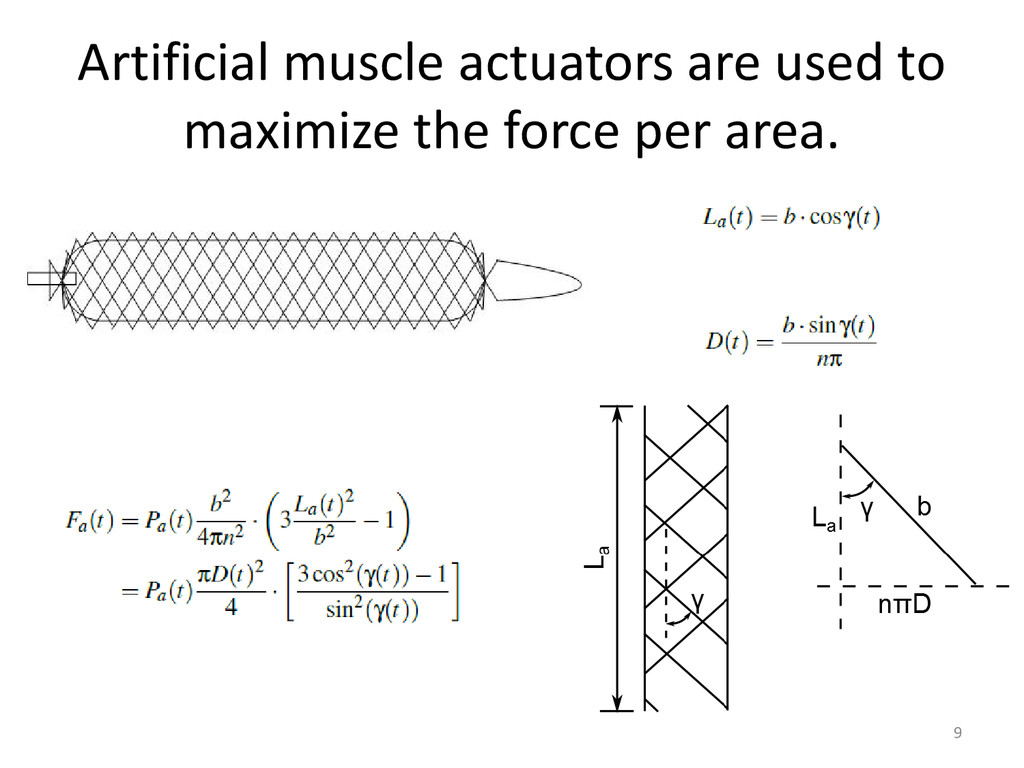
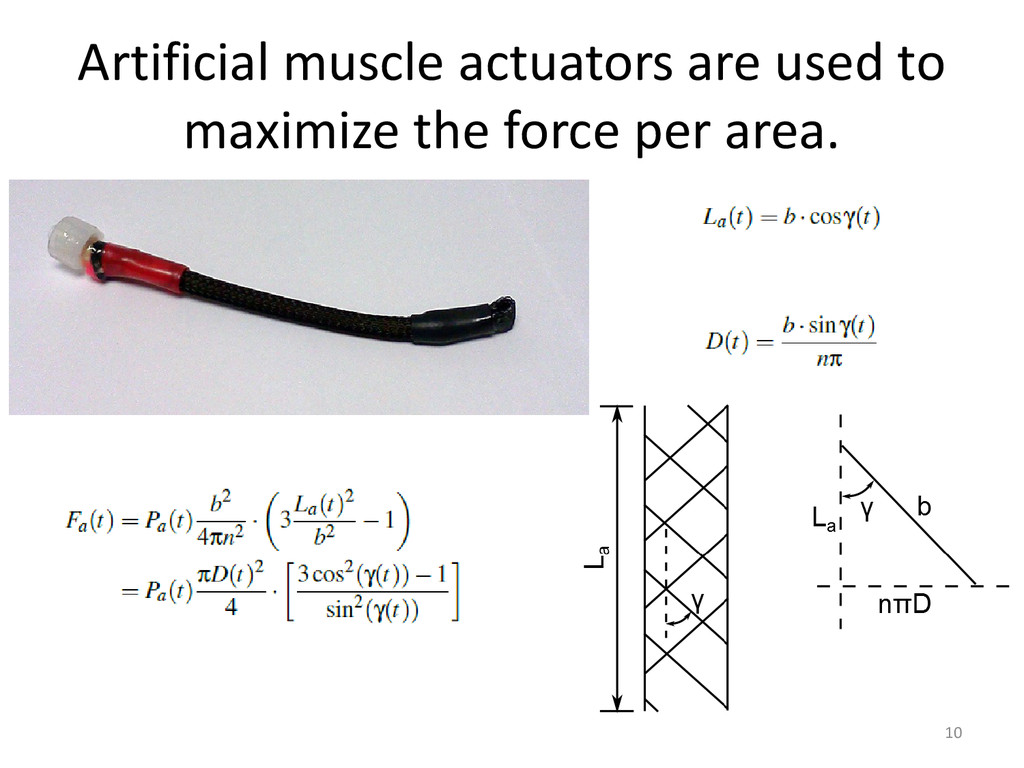
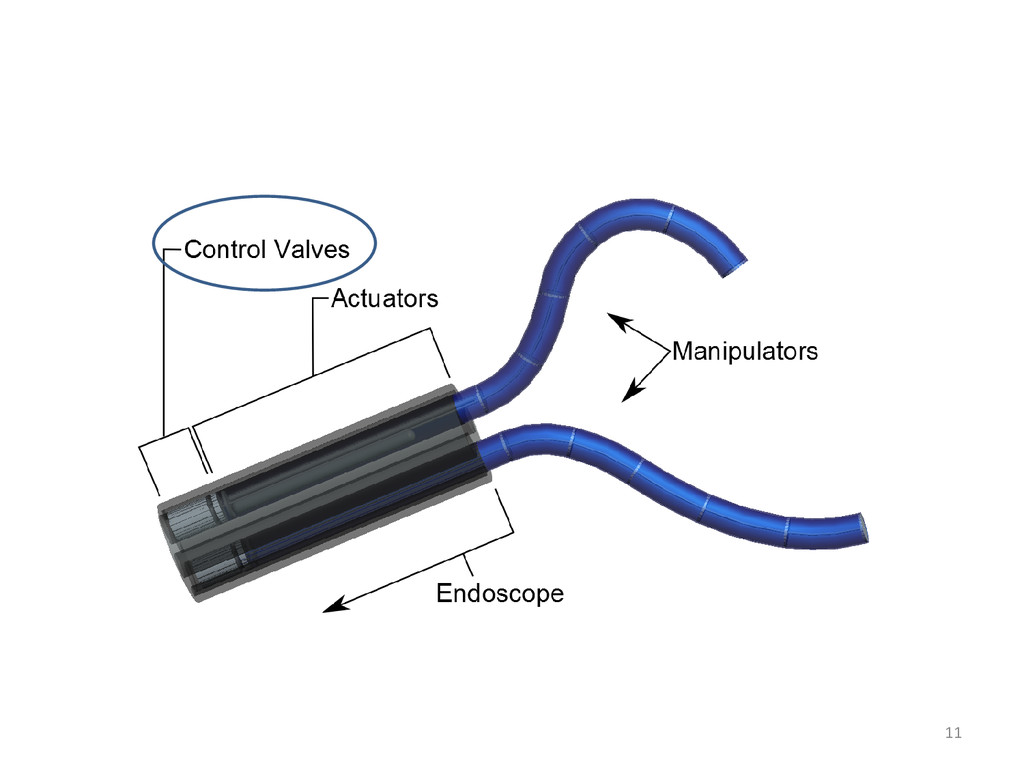
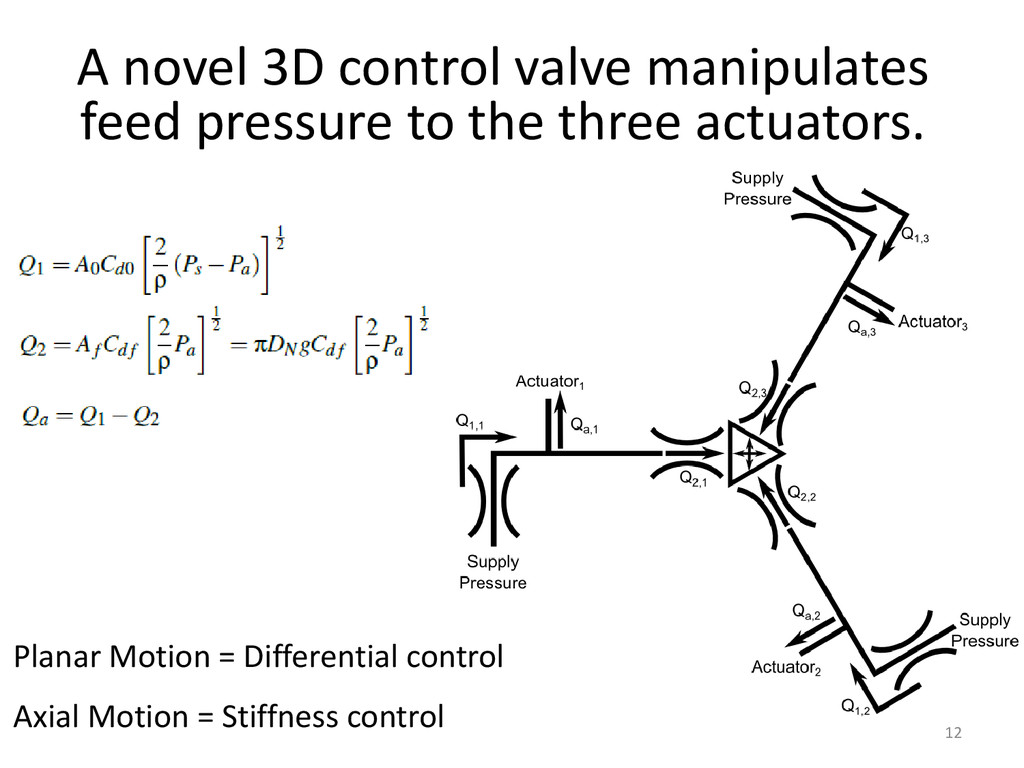
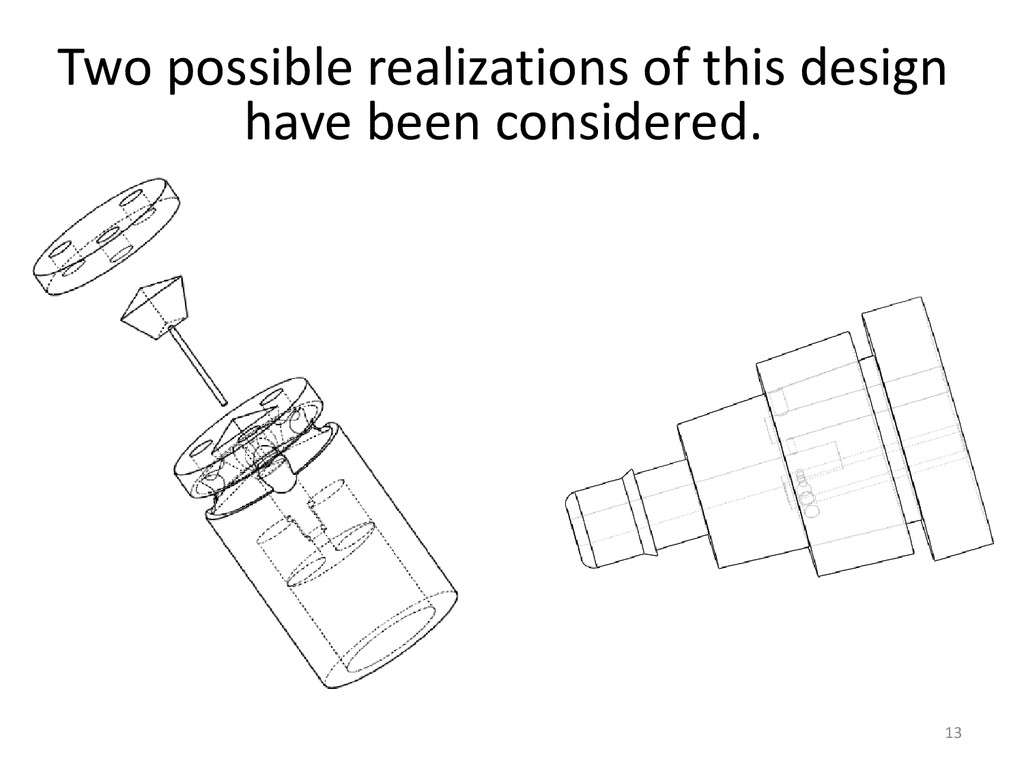
Existing robotic surgical platforms face limitations which include the balance between the scale of the robot and its capability. These limitations can be overcome by taking advantage of fluid power as an enabling technology with its inherent power density and controllability. The adaptation of fluid power for this purpose involves many challenges such as miniaturization of the necessary components and identifying the unique requirements of the surgical field. These challenges were explored through the design of a fluid powered surgical robot.
Cite: http://dx.doi.org/10.6084/m9.figshare.709015
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}