Robotic Fingers” “Faye Y. WuHarryH.Asada” “d'ArbeloffLaboratory,MassachusettsInstitute of Technology Cambridge, MA 02139, USA, {yfwu,asada}@mit.edu”(July, 2014) 2. Arduino 官網 https://www.arduino.cc/en/Guide/Introduction 3. Massimo Banzi: How Arduino is open-sourcing imagination ,TED(6,2012) 4. 經濟部 智慧自動化 產業期刊 季刊 NO.10 (9,2014)頁碼 11 頁 5. S.K. Clark and K.D. Wise, “Pressure sensitivity in anisotropically etched thin- diaphragm pressure sensors,” IEEE Transactions on Electron Devices, Vol. ED- 26, pp. 1887-1896, 1979. 6. W.P. Eaton and J.H. Smith, “Micromachined pressure sensors: review and recent developments,” Smart Master., Struct. 6, pp. 530-539, 1997. 7. 國立中央大學,資訊工程研究所,碩士論文,Intuitive Remote Control Robot Arm System,研究生:蔡子文,指導教授:曾定章教授(6,2015)p5 8. 行政院 2010 年產業科技策略會議,議題三:智慧型自動化之產業化推動策略,子題 二: 發展智慧型機器人產業,經濟部工業局(12,2010)p20 9. 機器人軍團 顛覆勞力供應鏈,經濟日報 張小玫、科技產業資訊室團隊(2,2015) 10. 物聯網將掀起工業 4.0 革命,RESEARCH PORTAL 科技政策觀點(6,2015) 11. 國立台灣科技大學,機械工程系,碩士論文,以系統晶片發展具機器視覺隻機械手 臂運動控制,研究生誣憲欣,指導教授黃緒哲教授(6,2006) 12. 7. 國立中央大學,機械工程研究所,碩士論文,力量控制於機械手臂運動之應用, 研究生喬執中,指導教授黃碧正教授(7,2001)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
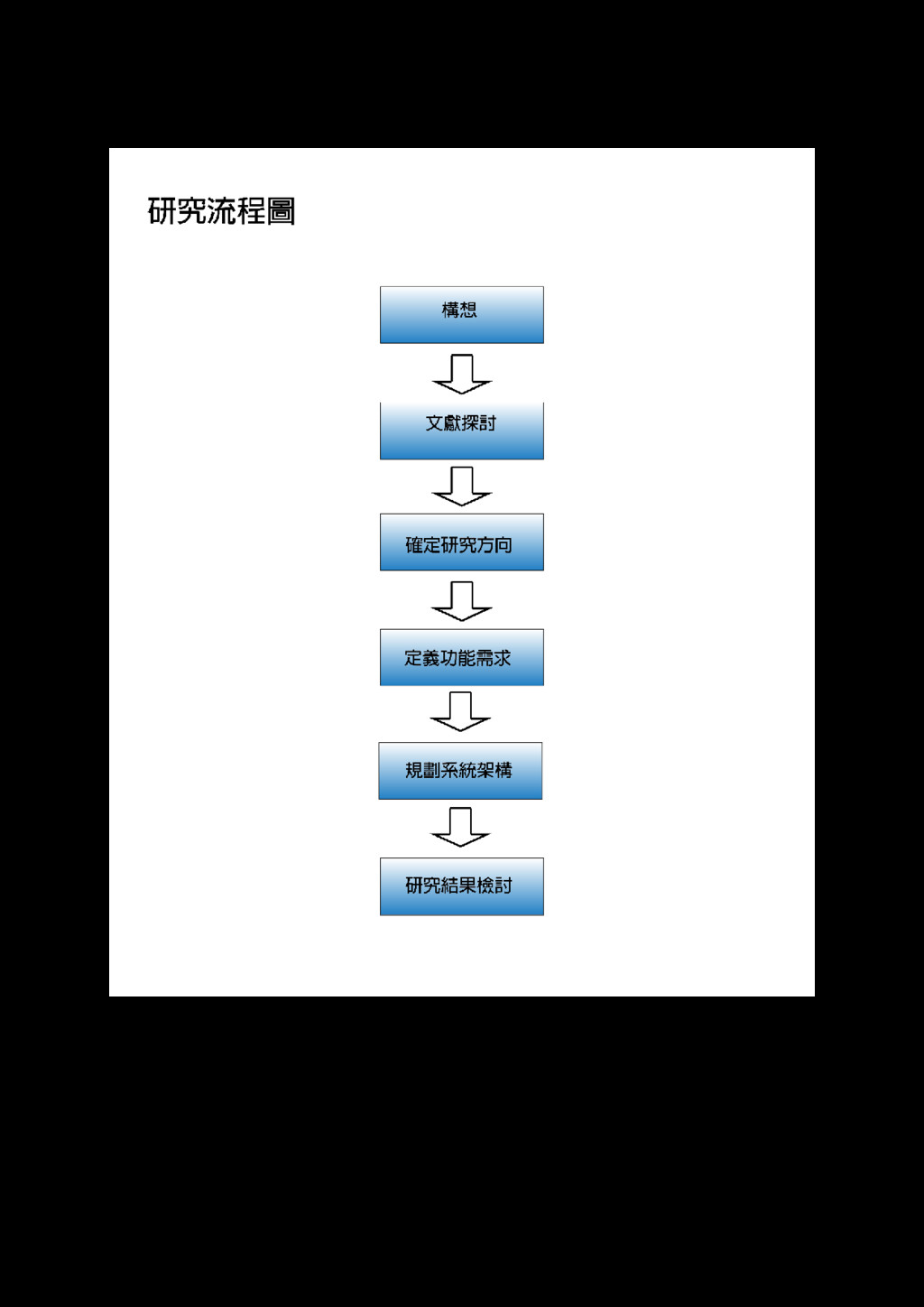
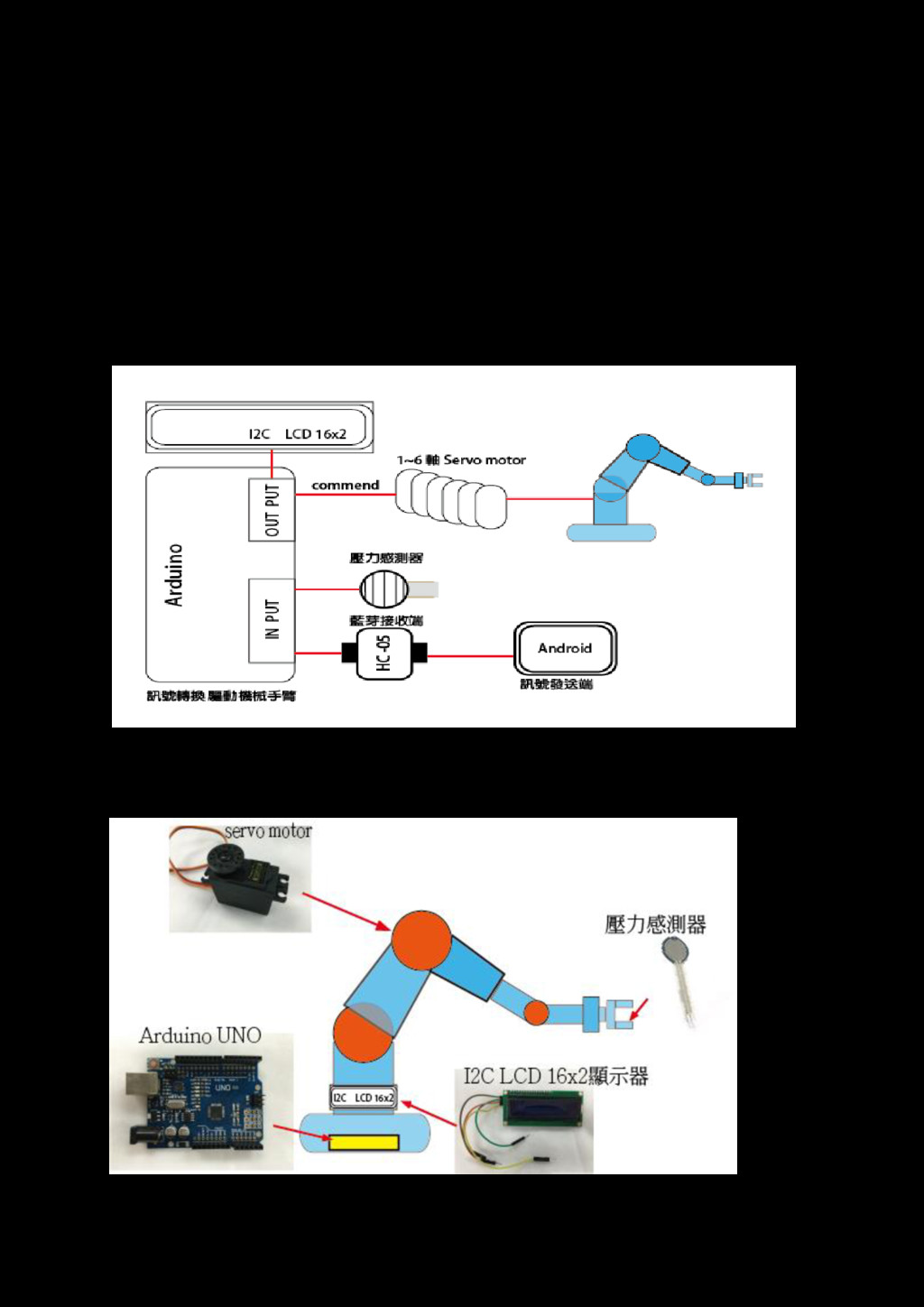
![感測器之介紹 在網通及感測器的發展帶動下,物聯網時代即將來臨,感測器的多樣化,剛開始較 多使用在汽車上,到現在感測器越來越多樣化,舉凡我們外界感受到的物理因素,都 可以透過感測器,比如重力,壓力,溫度,濕度還有空氣品質都可以透過感測器變成 訊號給終端的接收裝置比如,Raspberry PI,Arduino,android,IOS,ARM mbed... 等等,再經過雲端做處理。圖例[X] Arduino 接收訊號根據壓力感測器,commend](https://files.speakerdeck.com/presentations/3595506f9ea846ca8c2065ea9b6b9058/slide_13.jpg){kind=link}
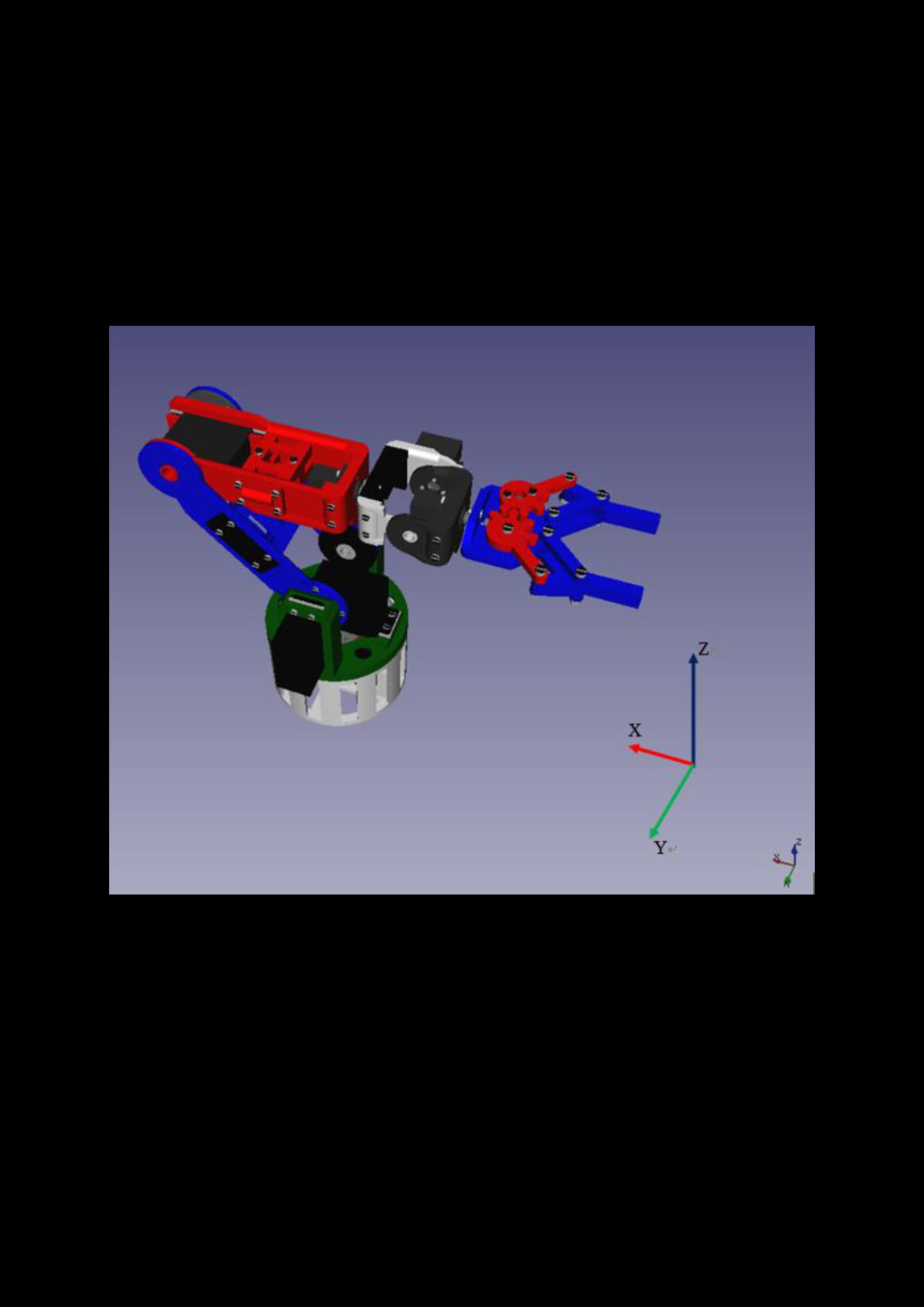
![機械手臂發展現況及探討 機械手臂在工業自動化的應用已經相當廣泛,主要是使用於人工無法進行或者會耗 費較多時間來做的工作,機械手臂在精度與耐用性上可以減少許人為的不可預知問題。 自從第一台產業用機器人發明以來,機械手臂的應用也從原本的汽車工業、模具製造、 電子製程等相關產業,更拓展到農業、醫療、服務業…等等,近年來各國把重點放在 輔具機械手臂,例圖[X] 。 http://robohub.org/robots-podcast-supernumerary-limbs-with-federico-parietti/](https://files.speakerdeck.com/presentations/3595506f9ea846ca8c2065ea9b6b9058/slide_14.jpg){kind=link}
{kind=link}
{kind=link}