University College Dublin, Ireland email:
[email protected] Florian D¨ orfler and Gabriela Hug ETH Z¨ urich, Switzerland emails: dorfl
[email protected],
[email protected] David J. Hill⇤ and Gregor Verbiˇ c University of Sydney, Australia ⇤ also University of Hong Kong emails:
[email protected],
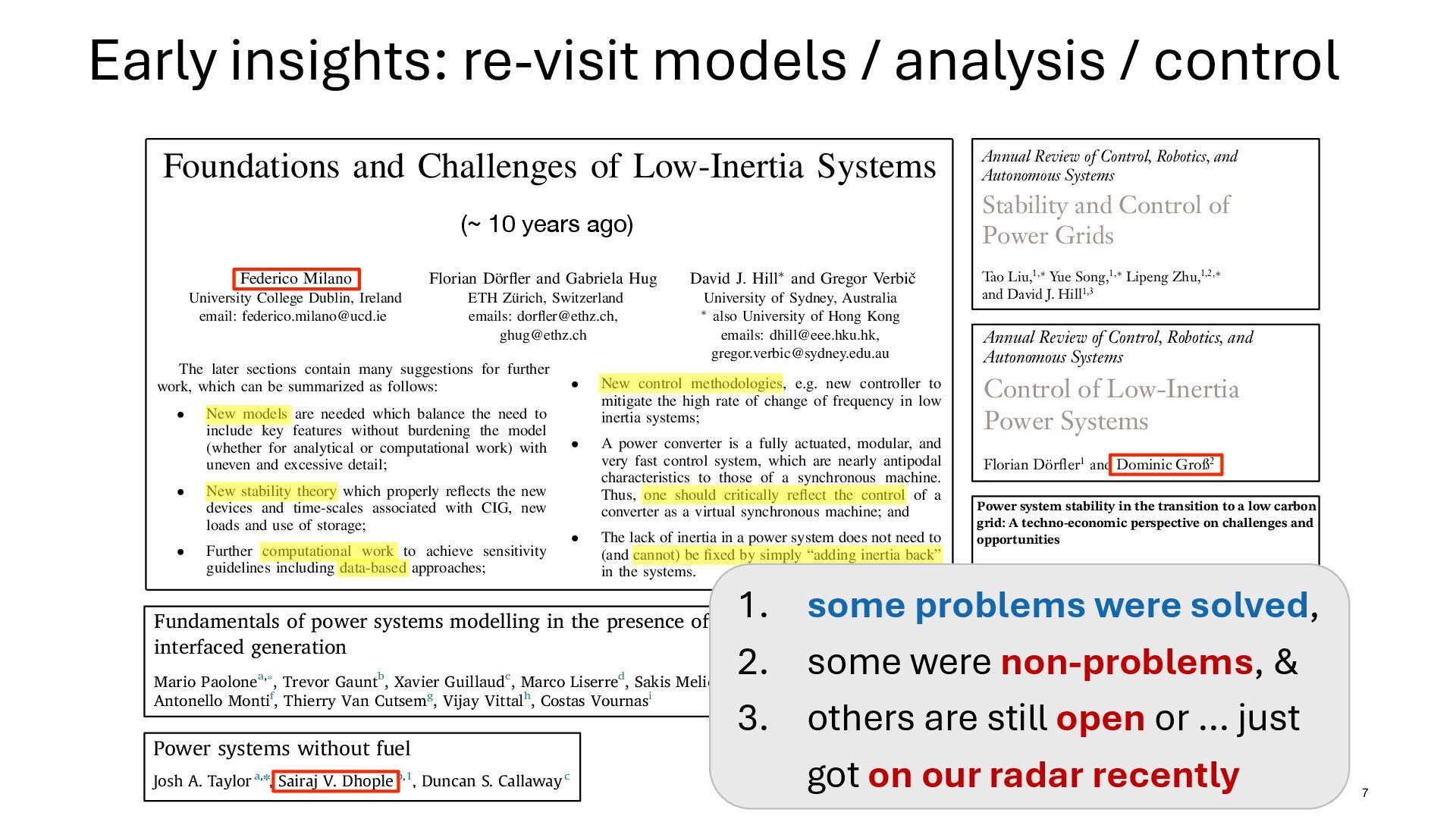
[email protected] Abstract —The electric power system is currently undergoing a period of unprecedented changes. Environmental and sustain- ability concerns lead to replacement of a significant share of conventional fossil fuel-based power plants with renewable energy resources. This transition involves the major challenge of substi- tuting synchronous machines and their well-known dynamics and controllers with power electronics-interfaced generation whose regulation and interaction with the rest of the system is yet to be fully understood. In this article, we review the challenges of such low-inertia power systems, and survey the solutions that have been put forward thus far. We strive to concisely summarize the laid- out scientific foundations as well as the practical experiences of industrial and academic demonstration projects. We touch upon the topics of power system stability, modeling, and control, and we particularly focus on the role of frequency, inertia, as well as control of power converters and from the demand-side. Keywords — Low-inertia power systems, frequency stability, rate of change of frequency (RoCoF), converter-interfaced generation (CIG), grid-forming control, MIGRATE, RE-SEVE, CSIRO. I. INTRODUCTION In an effort to render the electric power system more sustainable, increasing shares of wind and solar generation are being deployed all around the world. The goal is to replace fossil fuel and nuclear based generation by renewable resources. Hence, the total global installed capacities for wind support. This may create unexpected couplings and control approaches based on time-scale separations may become more brittle and increasingly less valid. Likewise, system control tasks predominantly provided by synchronous generators (such as voltage support and oscillation damping) have to be increas- ingly shouldered by non-synchronous devices. Large-scale low inertia power systems have been merely a theoretical concept up until just a decade ago but have now become a reality. Some countries already have solar and/or wind generation capacity able to cover more than 100% of the demand. And some power systems around the world are facing the challenges caused by low inertia. The following are relevant real-life examples. • Australia [3]: The level of combined wind and solar capacity is rapidly increasing and has reached 20% in the National Electricity Market. However, the grid is isolated with a long linear or ’stringy’ topology (over 5000 km synchronous) which leads to special difficul- ties. Furthermore, a multiple of the already existing renewable capacity has additionally been proposed. There are already concerns about inertia distribution. • Central Europe [4]: A task force comprised of Euro- pean system operators studied the frequency behavior for the European system for decreasing system inertia. The main conclusion is that in the interconnected CIG levels has impact on almost everything from planning to operations, modeling, stability and control, there has been a need to focus on some aspects. Inevitably there has also been some emphasis given to work in and connected to the authors’ own institutions in the areas of dynamics and control. Some emphasis has also been given to the relative roles of analytic, computational and practical aspects. The later sections contain many suggestions for further work, which can be summarized as follows: • New models are needed which balance the need to include key features without burdening the model (whether for analytical or computational work) with uneven and excessive detail; • New stability theory which properly reflects the new devices and time-scales associated with CIG, new loads and use of storage; • Further computational work to achieve sensitivity guidelines including data-based approaches; • New control methodologies, e.g. new controller to mitigate the high rate of change of frequency in low inertia systems; • A power converter is a fully actuated, modular, and very fast control system, which are nearly antipodal characteristics to those of a synchronous machine. Thus, one should critically reflect the control of a converter as a virtual synchronous machine; and • The lack of inertia in a power system does not need to (and cannot) be fixed by simply “adding inertia back” in the systems. This group of authors believes that these are the core scientific D. Hill is supported in Hong Kong by the Research Grants Council Theme-based Research Scheme (Project No. T23- 701/14-N). In Sydney D. Hill and G. Verbiˇ c were supported by the CSIRO University Cluster on Future Grid. The authors would like to thank their collaborators for insightful discussions and constructive feedback on an early draft of this survey. Particular thanks goes to the members of the MIGRATE consortium for many inputs and discussions, and to Uros Markovic at ETHZ; Dr ´ Alvaro Ortega in UCD; and Wenting Yi in HKU for contributing some content to a few sections of the paper. REFERENCES [1] “Global wind statistics 2017,” Global Wind Energy Council, Tech. Rep., 2018. [2] International Energy Agency (IEA), “2016 snapshot of global photo- voltaic markets,” 2017. [3] AEMO, “Update Report - Black System Event in South Australia on 28 September 2016,” Tech. Rep., 2016. [4] RG-CE System Protection & Dynamics Sub Group, “Frequency stabil- ity evaluation criteria for the synchronous zone of continental europe,” ENTSO-E, Tech. Rep., 2016. [5] Svenska Kraftn¨ at, Statnett, Fingrid and Energinet.dk, “Challenges and Opportunities for the Nordic Power System,” Tech. Rep., 2016. [6] ERCOT Concept Paper, “Future Ancillary Services in ERCOT,” Tech. Rep., 2013. [7] EirGrid and SONI, All-island Generation Capacity Statement 2017- 2026, 2017, [Online]. Available: http://www.eirgridgroup.com. [8] EirGrid and Soni, “DS3: System Services Review TSO Recommen- dations,” EirGrid, Tech. Rep., 2012. [9] M.-S. Debry, G. Denis, T. Prevost, F. Xavier, and A. Menze, “Maximiz- ing the penetration of inverter-based generation on large transmission CIG levels has impact on almost everything from planning to operations, modeling, stability and control, there has been a need to focus on some aspects. Inevitably there has also been some emphasis given to work in and connected to the authors’ own institutions in the areas of dynamics and control. Some emphasis has also been given to the relative roles of analytic, computational and practical aspects. The later sections contain many suggestions for further work, which can be summarized as follows: • New models are needed which balance the need to include key features without burdening the model (whether for analytical or computational work) with uneven and excessive detail; • New stability theory which properly reflects the new devices and time-scales associated with CIG, new loads and use of storage; • Further computational work to achieve sensitivity guidelines including data-based approaches; • New control methodologies, e.g. new controller to mitigate the high rate of change of frequency in low inertia systems; • A power converter is a fully actuated, modular, and very fast control system, which are nearly antipodal characteristics to those of a synchronous machine. Thus, one should critically reflect the control of a converter as a virtual synchronous machine; and • The lack of inertia in a power system does not need to (and cannot) be fixed by simply “adding inertia back” in the systems. This group of authors believes that these are the core scientific challenges to be addressed in low-inertia systems. There are also many important points to be made concerning issues that we only superficially touched upon such as the effects of low- inertia grids on conventional generation, voltage stability and reactive power support by converters, the economic aspects of inertia and conventional generation dispatch, as well as the role of FACTS devices, HVDC, and synchronous condensers. Ultimately, the techniques above will serve to define proper network codes and, hopefully, to increase the instantaneous penetration and the capacity credit of CIGs. Finally the authors generally advocate a more scientific approach to technical and bigger questions where analytical D. Hill is supported in Hong Kong by the Research Grants Council Theme-based Research Scheme (Project No. T23- 701/14-N). In Sydney D. Hill and G. Verbiˇ c were supported by the CSIRO University Cluster on Future Grid. The authors would like to thank their collaborators for insightful discussions and constructive feedback on an early draft of this survey. Particular thanks goes to the members of the MIGRATE consortium for many inputs and discussions, and to Uros Markovic at ETHZ; Dr ´ Alvaro Ortega in UCD; and Wenting Yi in HKU for contributing some content to a few sections of the paper. REFERENCES [1] “Global wind statistics 2017,” Global Wind Energy Council, Tech. Rep., 2018. [2] International Energy Agency (IEA), “2016 snapshot of global photo- voltaic markets,” 2017. [3] AEMO, “Update Report - Black System Event in South Australia on 28 September 2016,” Tech. Rep., 2016. [4] RG-CE System Protection & Dynamics Sub Group, “Frequency stabil- ity evaluation criteria for the synchronous zone of continental europe,” ENTSO-E, Tech. Rep., 2016. [5] Svenska Kraftn¨ at, Statnett, Fingrid and Energinet.dk, “Challenges and Opportunities for the Nordic Power System,” Tech. Rep., 2016. [6] ERCOT Concept Paper, “Future Ancillary Services in ERCOT,” Tech. Rep., 2013. [7] EirGrid and SONI, All-island Generation Capacity Statement 2017- 2026, 2017, [Online]. Available: http://www.eirgridgroup.com. [8] EirGrid and Soni, “DS3: System Services Review TSO Recommen- dations,” EirGrid, Tech. Rep., 2012. [9] M.-S. Debry, G. Denis, T. Prevost, F. Xavier, and A. Menze, “Maximiz- ing the penetration of inverter-based generation on large transmission systems: the migrate project,” in 6th Solar Integration Workshop, 2017. [10] RESERVE, 2016, [Online]. Available: https://www.re-serve.eu. [11] CSIRO, “Change and Choice-The Future Grid Forum’s analysis of Australia’s potential electrical pathways to 2050: Final Report,” Tech. Rep. December, 2013. [12] P. Tielens and D. Van Hertem, “The relevance of inertia in power systems,” Renewable and Sustainable Energy Reviews, vol. 55, pp. 999–1009, 2016. [13] W. Winter, K. Elkington, G. Bareux, and J. Kostevc, “Pushing the limits: Europe’s new grid: Innovative tools to combat transmission bottlenecks and reduced inertia,” IEEE Power and Energy Magazine, vol. 13, no. 1, pp. 60–74, 2015. [14] B. Kroposki, B. Johnson, Y. Zhang, V. Gevorgian, P. Denholm, B.-M. Hodge, and B. Hannegan, “Achieving a 100% renewable grid: Oper- CIG levels has impact on almost everything from planning to operations, modeling, stability and control, there has been a need to focus on some aspects. Inevitably there has also been some emphasis given to work in and connected to the authors’ own institutions in the areas of dynamics and control. Some emphasis has also been given to the relative roles of analytic, computational and practical aspects. The later sections contain many suggestions for further work, which can be summarized as follows: • New models are needed which balance the need to include key features without burdening the model (whether for analytical or computational work) with uneven and excessive detail; • New stability theory which properly reflects the new devices and time-scales associated with CIG, new loads and use of storage; • Further computational work to achieve sensitivity guidelines including data-based approaches; • New control methodologies, e.g. new controller to mitigate the high rate of change of frequency in low inertia systems; • A power converter is a fully actuated, modular, and very fast control system, which are nearly antipodal characteristics to those of a synchronous machine. Thus, one should critically reflect the control of a converter as a virtual synchronous machine; and • The lack of inertia in a power system does not need to (and cannot) be fixed by simply “adding inertia back” in the systems. This group of authors believes that these are the core scientific D. Hill is supported in Hong Kong by the Research Grants Council Theme-based Research Scheme (Project No. T23- 701/14-N). In Sydney D. Hill and G. Verbiˇ c were supported by the CSIRO University Cluster on Future Grid. The authors would like to thank their collaborators for insightful discussions and constructive feedback on an early draft of this survey. Particular thanks goes to the members of the MIGRATE consortium for many inputs and discussions, and to Uros Markovic at ETHZ; Dr ´ Alvaro Ortega in UCD; and Wenting Yi in HKU for contributing some content to a few sections of the paper. REFERENCES [1] “Global wind statistics 2017,” Global Wind Energy Council, Tech. Rep., 2018. [2] International Energy Agency (IEA), “2016 snapshot of global photo- voltaic markets,” 2017. [3] AEMO, “Update Report - Black System Event in South Australia on 28 September 2016,” Tech. Rep., 2016. [4] RG-CE System Protection & Dynamics Sub Group, “Frequency stabil- ity evaluation criteria for the synchronous zone of continental europe,” ENTSO-E, Tech. Rep., 2016. [5] Svenska Kraftn¨ at, Statnett, Fingrid and Energinet.dk, “Challenges and Opportunities for the Nordic Power System,” Tech. Rep., 2016. [6] ERCOT Concept Paper, “Future Ancillary Services in ERCOT,” Tech. Rep., 2013. [7] EirGrid and SONI, All-island Generation Capacity Statement 2017- 2026, 2017, [Online]. Available: http://www.eirgridgroup.com. [8] EirGrid and Soni, “DS3: System Services Review TSO Recommen- dations,” EirGrid, Tech. Rep., 2012. [9] M.-S. Debry, G. Denis, T. Prevost, F. Xavier, and A. Menze, “Maximiz- ing the penetration of inverter-based generation on large transmission Annual Review of Control, Robotics, and Autonomous Systems Stability and Control of Power Grids Tao Liu,1,∗ Yue Song,1,∗ Lipeng Zhu,1,2,∗ and David J. Hill1,3 1Department of Electrical and Electronic Engineering, University of Hong Kong, Hong Kong, China; email:
[email protected],
[email protected],
[email protected] 2College of Electrical and Information Engineering, Hunan University, Changsha, China; email:
[email protected] 3School of Electrical Engineering and Telecommunications, University of New South Wales, Kensington, New South Wales, Australia Annu. Rev. Control Robot. Auton. Syst. 2022. 5:689–716 First published as a Review in Advance on November 4, 2021 The Annual Review of Control, Robotics, and Autonomous Systems is online at control.annualreviews.org https://doi.org/10.1146/annurev-control-042820- 011148 Copyright © 2022 by Annual Reviews. All rights reserved ∗These authors contributed equally to this article Keywords power grids, stability, network systems, distributed control, machine learning, deep learning Abstract Power grids are critical infrastructure in modern society, and there are well- established theories for the stability and control of traditional power grids under a centralized paradigm. Driven by environmental and sustainability concerns, power grids are undergoing an unprecedented transition, with much more exibility as well as uncertainty brought by the growing pen- etration of renewable energy and power electronic devices. A new paradigm for stability and control is under development that uses graph-based, data- based, and distributed analysis tools. This article surveys classic and novel results on the stability and control of power grids to provide a perspective on this both old and new subject. Annu. Rev. Control Robot. Auton. Syst. 2022.5:689-716. Downloaded from www.annualreviews.org Access provided by ETH- Zurich on 01/06/23. For personal use only. 2130 IEEE JOURNAL OF EMERGING AND SELECTED TOPICS IN POWER ELECTRONICS, VOL. 7, NO. 4, DECEMBER 2019 On the Inertia of Future More-Electronics Power Systems Jingyang Fang , Student Member, IEEE, Hongchang Li , Member, IEEE, Yi Tang , Senior Member, IEEE, and Frede Blaabjerg , Fellow, IEEE Abstract—Inertia plays a vital role in maintaining the fre- quency stability of power systems. However, the increase of power electronics-based renewable generation can dramatically reduce the inertia levels of modern power systems. This issue has already challenged the control and stability of small-scale power systems. It will soon be faced by larger power systems as the trend of large-scale renewable integration continues. In view Contents lists available at ScienceDirect Electric Power Systems Research journal homepage: www.elsevier.com/locate/epsr Fundamentals of power systems modelling in the presence of converter- interfaced generation Mario Paolonea,⁎, Trevor Gauntb, Xavier Guillaudc, Marco Liserred, Sakis Meliopoulose, Antonello Montif, Thierry Van Cutsemg, Vijay Vittalh, Costas Vournasi a ÉcolePolytehcniqueFédérale de Lausanne, Distributed Electrical Systems Laboratory, Lausanne, Switzerland b University of Cape Town, Department of Electrical Engineering, Cape Town, South Africa c Univ. Lille, Arts et Metiers Institute of Technology, Centrale Lille, Yncrea Hauts-de-France, ULR 2697 - L2EP, F-59000, Lille, France d University of Kiel, Chair of Power Electronics, Kiel, Germany e Georgia Institute of Technology, School of Electrical and Computer Engineering, Atlanta, GA, United States f RWTH Aachen University, Institute for Automation of Complex Power Systems, Aachen, Germany g University of Liège, Fund for Scientific Research (FNRS), Liège, Belgium h Electric Power Systems Research 189 (2020) 106811 T O V E R V I E W Power system stability in the transition to a low carbon grid: A techno-economic perspective on challenges and opportunities Lasantha Meegahapola1 | Pierluigi Mancarella2,3 | Damian Flynn4 | Rodrigo Moreno5,6,7 1RMIT University, Melbourne, Australia 2The University of Melbourne, Melbourne, Australia 3The University of Manchester, Manchester, UK 4University College Dublin, Dublin, Ireland 5The University of Chile, Santiago, Chile 6Instituto Sistemas Complejos de Ingeniería, Santiago, Chile 7Imperial College London, London, UK Correspondence Lasantha Meegahapola, RMIT University, Melbourne, Australia. Email: lasantha.meegahapola@rmit. edu.au Edited by: Peter Lund, Co-Editor-in- Chief Abstract Increasing power system stability challenges are being witnessed worldwide, while transitioning toward low-carbon grids with a high-share of power elec- tronic converter (PEC)-interfaced renewable energy sources (RESs) and distrib- uted energy resources (DERs). Concurrently, new technologies and operational strategies are being implemented or proposed to tackle these chal- lenges. Since electricity grids are deregulated in many jurisdictions, such tech- nologies need to be integrated within a market framework, which is often a challenge in itself due to inevitable regulatory delays in updating grid codes and market rules. It is also highly desirable to ensure that an economically fea- sible optimal technology mix is integrated in the power system, without impos- ing additional burdens on electricity consumers. This article provides a comprehensive overview of emerging power system stability challenges posed by PEC-interfaced RES and DER, particularly related to low inertia and low system strength conditions, while also introducing new technologies that can help tackle these challenges and discussing the need for suitable techno- economic considerations to integrate them into system and market operation. As a key point, the importance of recognizing the complexity of system ser- vices to guarantee stability in low-carbon grids is emphasized, along with the Received: 1 September 2020 Revised: 1 February 2021 Accepted: 8 March 2021 DOI: 10.1002/wene.399 2041840x, 2021, 5, Downloaded from https://wires.onlinelibrary.wiley.com/doi/10.1002/wene.399 by Eth Zürich Eth-Bibliothek, Wiley Online Library on [06/01/2023]. See the Terms and Conditions (https://onlinelibrary.wiley.com/terms-and-conditions) on W (~ 10 years ago) AS06CH01_Dor er ARjats.cls September 14, 2022 15:9 Annual Review of Control, Robotics, and Autonomous Systems Control of Low-Inertia Power Systems Florian Dör er1 and Dominic Groß2 1Automatic Control Laboratory, ETH Zurich, Zurich, Switzerland; email: dor
[email protected] 2Department of Electrical and Computer Engineering, University of Wisconsin–Madison, Madison, Wisconsin, USA; email:
[email protected] Annu. Rev. Control Robot. Auton. Syst. 2023. 6:1.1–1.31 The Annual Review of Control, Robotics, and Autonomous Systems is online at control.annualreviews.org https://doi.org/10.1146/annurev-control-052622- 032657 Copyright © 2023 by the author(s). Keywords power systems control, power electronics control, low-inertia systems, grid-forming control, dynamic virtual power plant Abstract Electric power systems are undergoing an unprecedented transition from fossil fuel–based power plants to low-inertia systems that rely predominantly nnu. Rev. Control Robot. Auton. Syst. 2023.6. Downloaded from www.annualreviews.org Access provided by ETH- Zurich on 01/06/23. For personal use only. Power systems without fuel Josh A. Taylor a,n, Sairaj V. Dhople b,1, Duncan S. Callaway c a Electrical and Computer Engineering, University of Toronto, Toronto, Canada ON M5S 3G4 b Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/rser Renewable and Sustainable Energy Reviews Renewable and Sustainable Energy Reviews 57 (2016) 1322–1336 Early insights: re-visit models / analysis / control 7 I stopped collecting surveys five years ago… 1. some problems were solved, 2. some were non-problems, & 3. others are still open or … just got on our radar recently
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}