Apresentação do artigo de conclusão da disciplina de Análise Exploratória de Dados Espaciais cursada na Escola Politécnica da Universidade de São Paulo.
Objetivos:
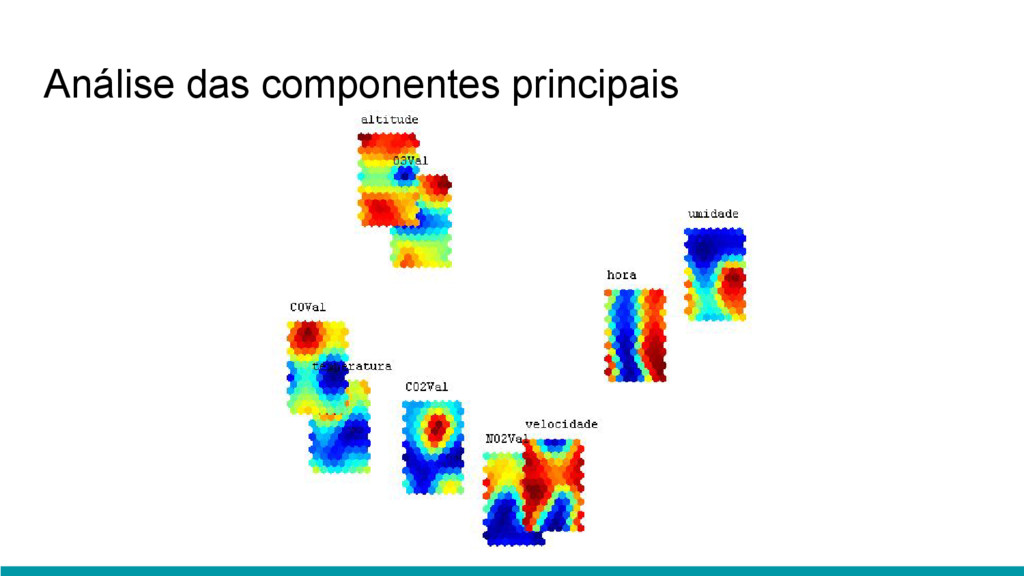
- Aplicação de análise multivariada em dados de qualidade do ar;
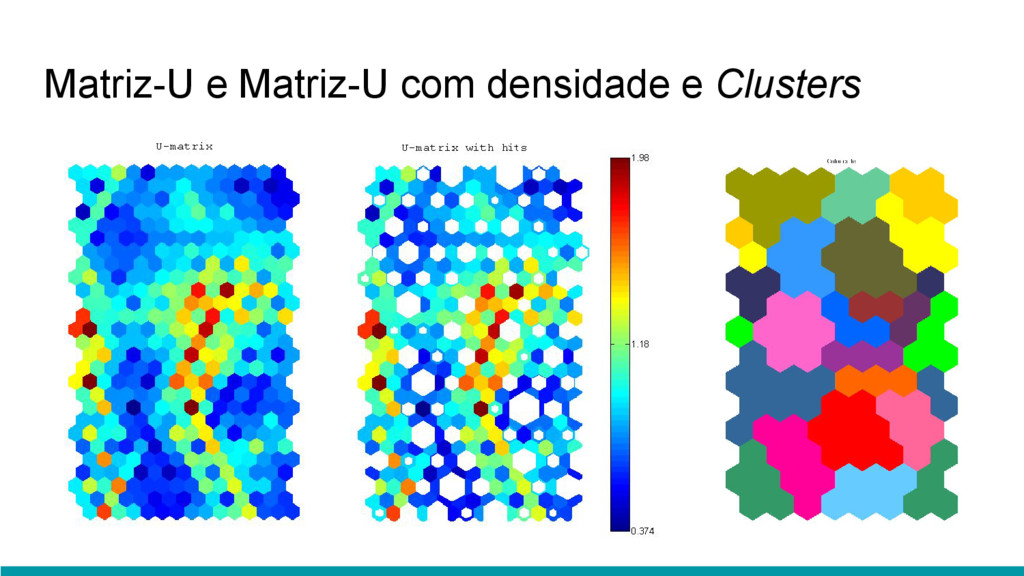
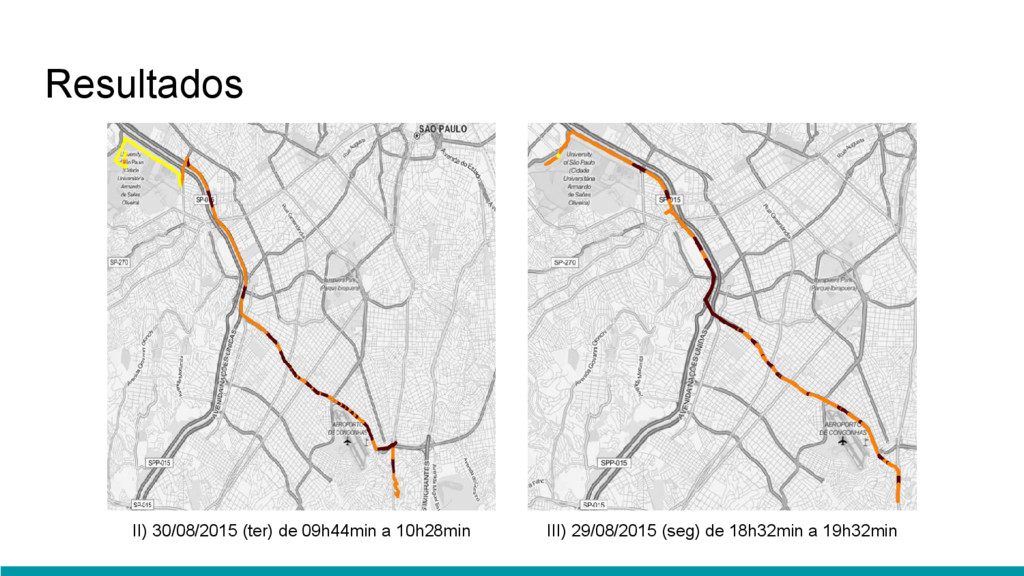
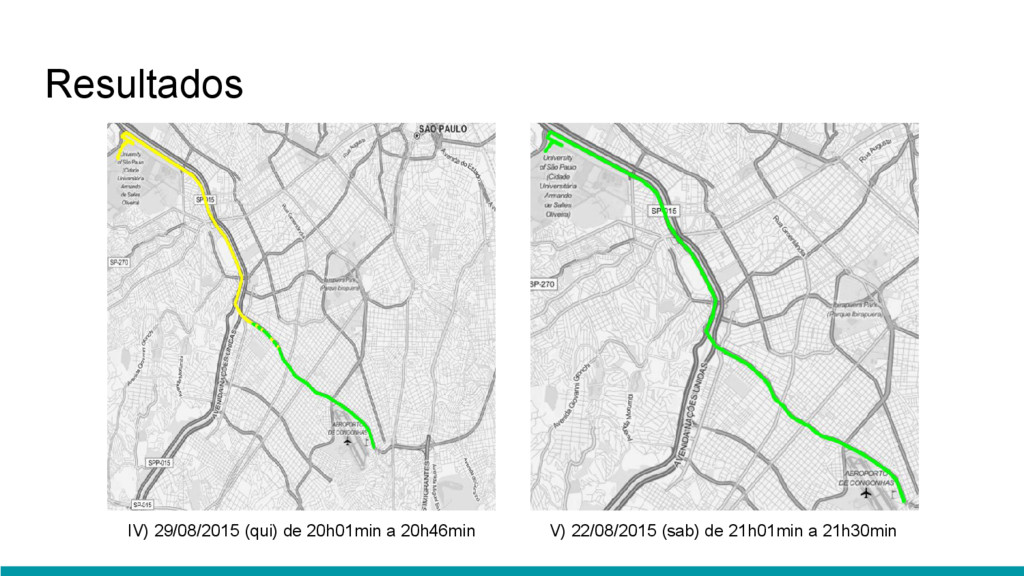
- Classificação de localidades urbanas em função da dispersão de poluentes em diferentes horarios.
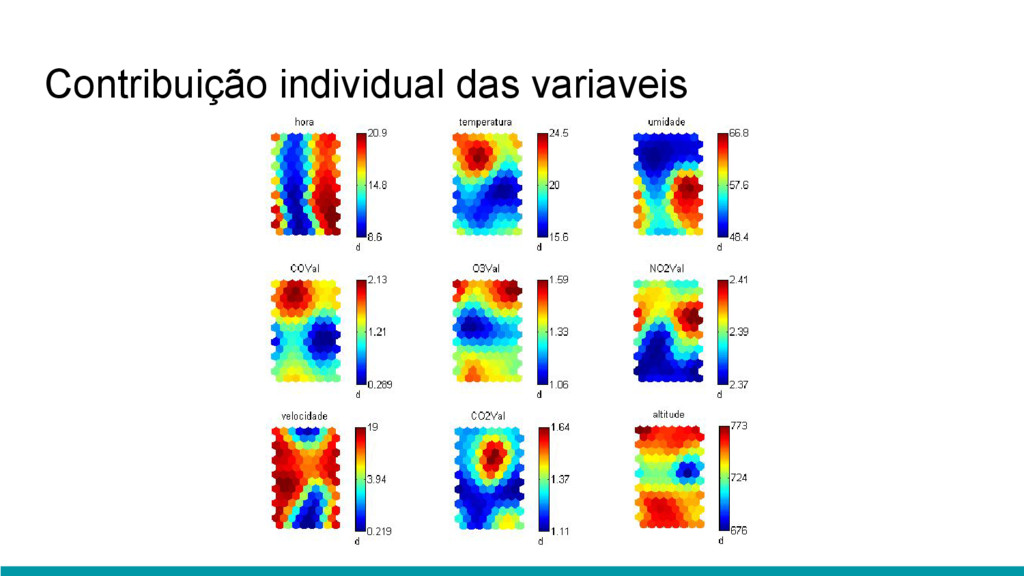
- Analisar o comportamento de cada variável em relação às classes obtidas por similaridade;
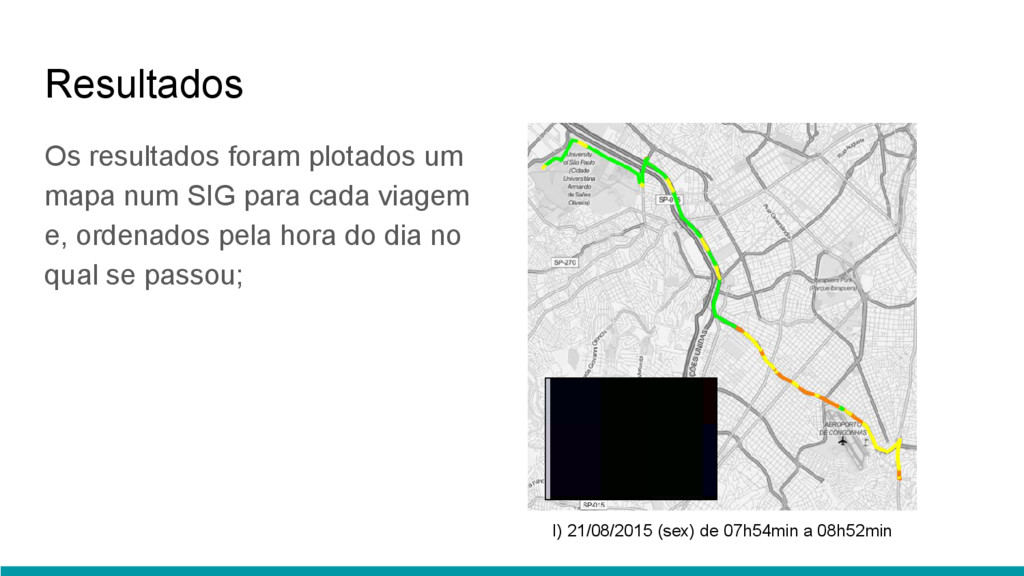
- Alimentar a discussão de questões relacionadas à representação cartográfica dos resultados e à granularidade espacial e temporal.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}