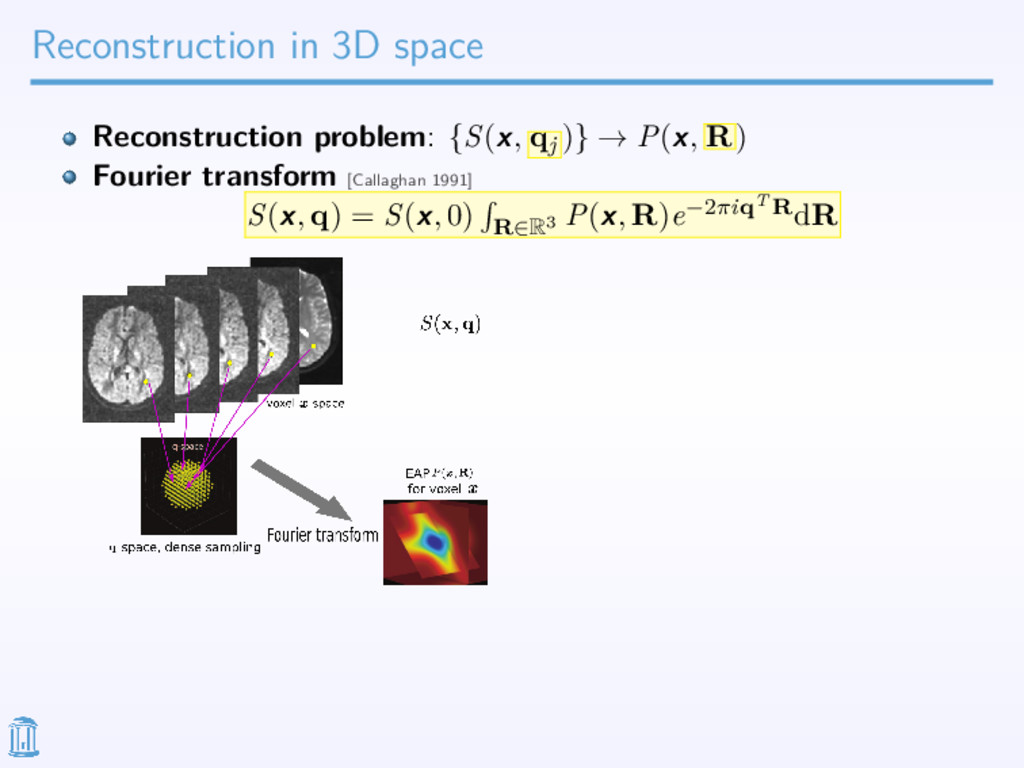
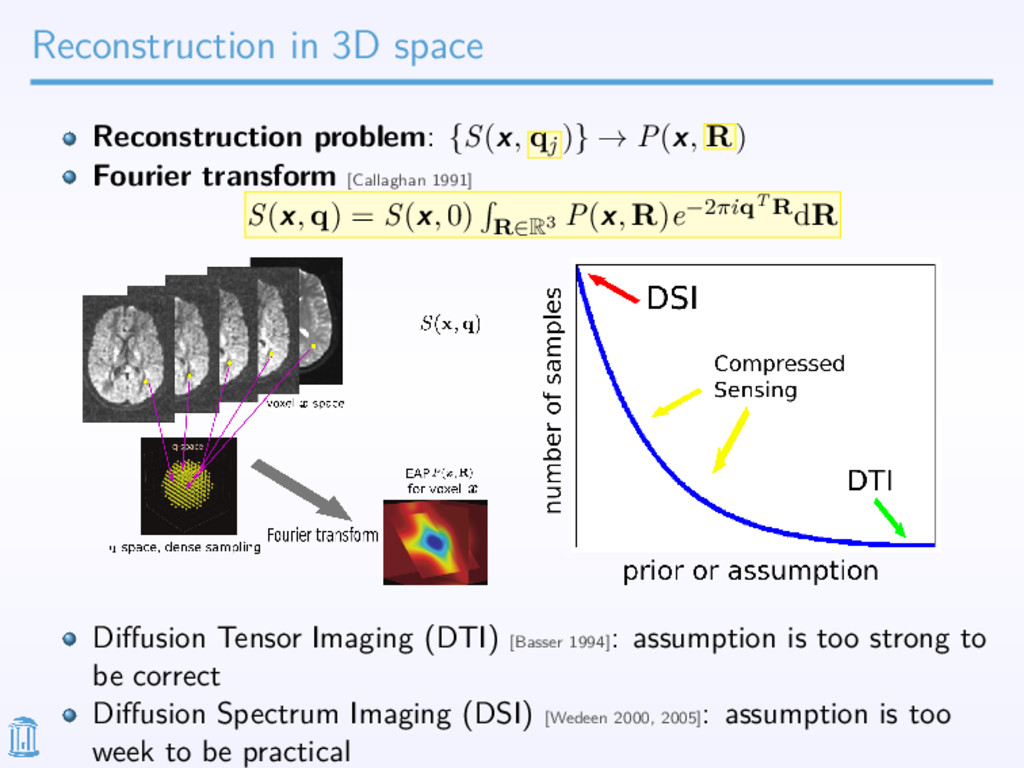
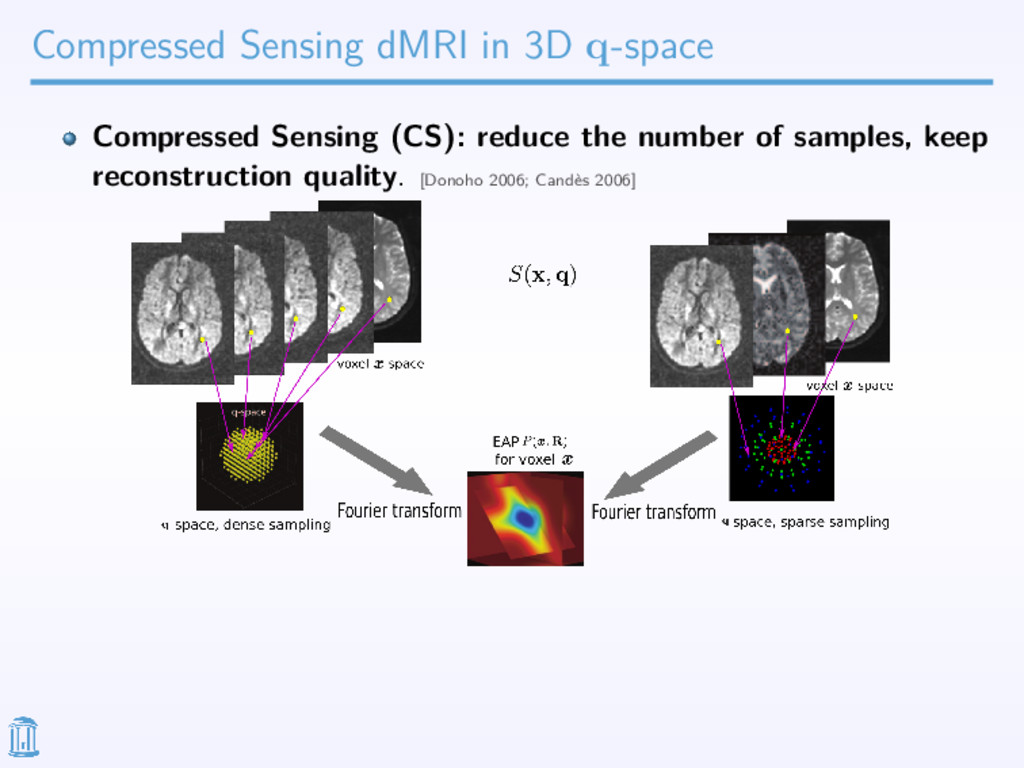
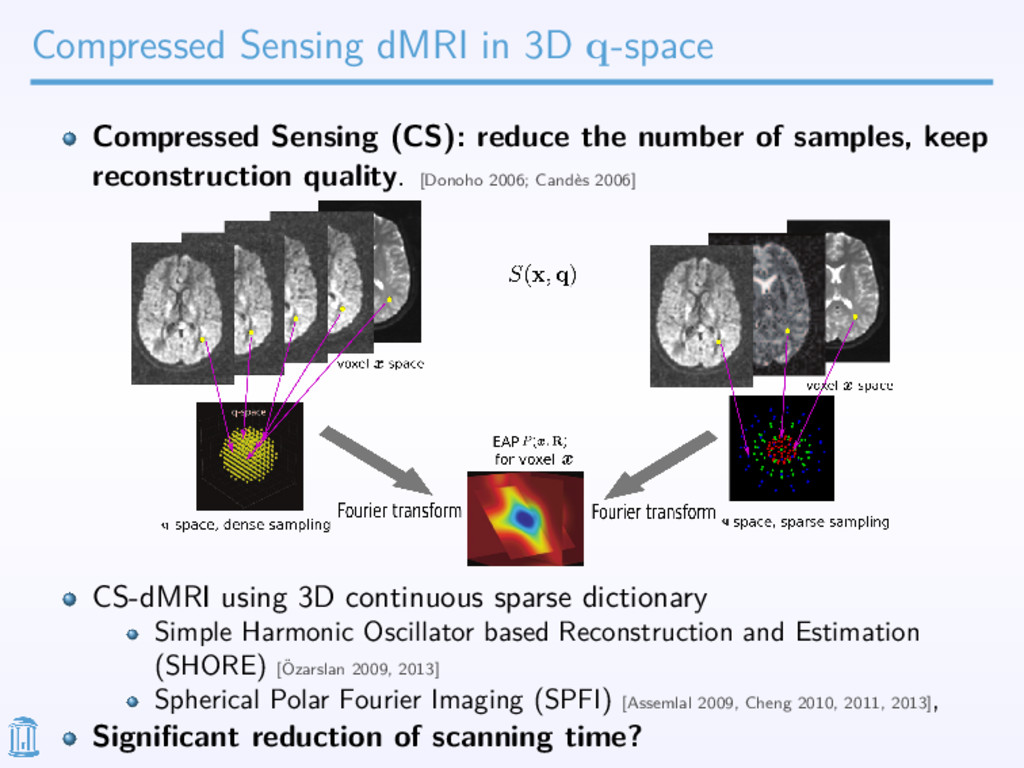
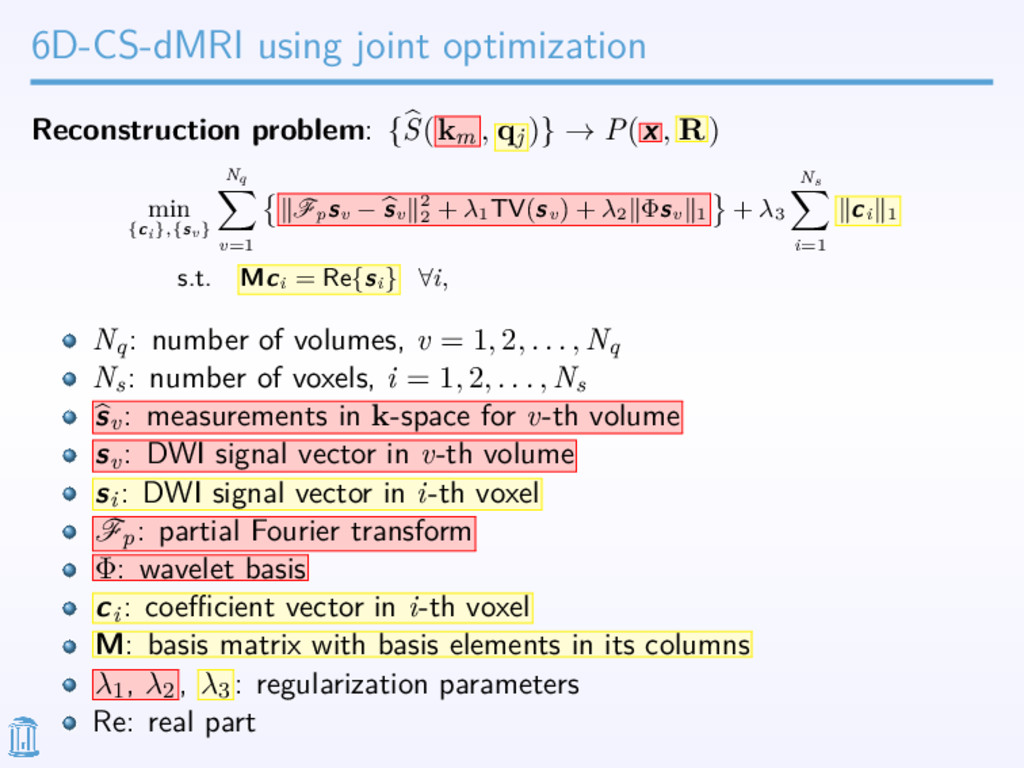
→ {S(x , qj )} → P(x, R) Pros: Fast, easy to be implemented: volume by volume [Lustig 2007], voxel by voxel [Cheng 2013] Cons: Not consider the relationship between diffusion signals in the same voxel across different DWI volumes. Not consider the relationship between diffusion signals in the same DWI volume across different voxels.
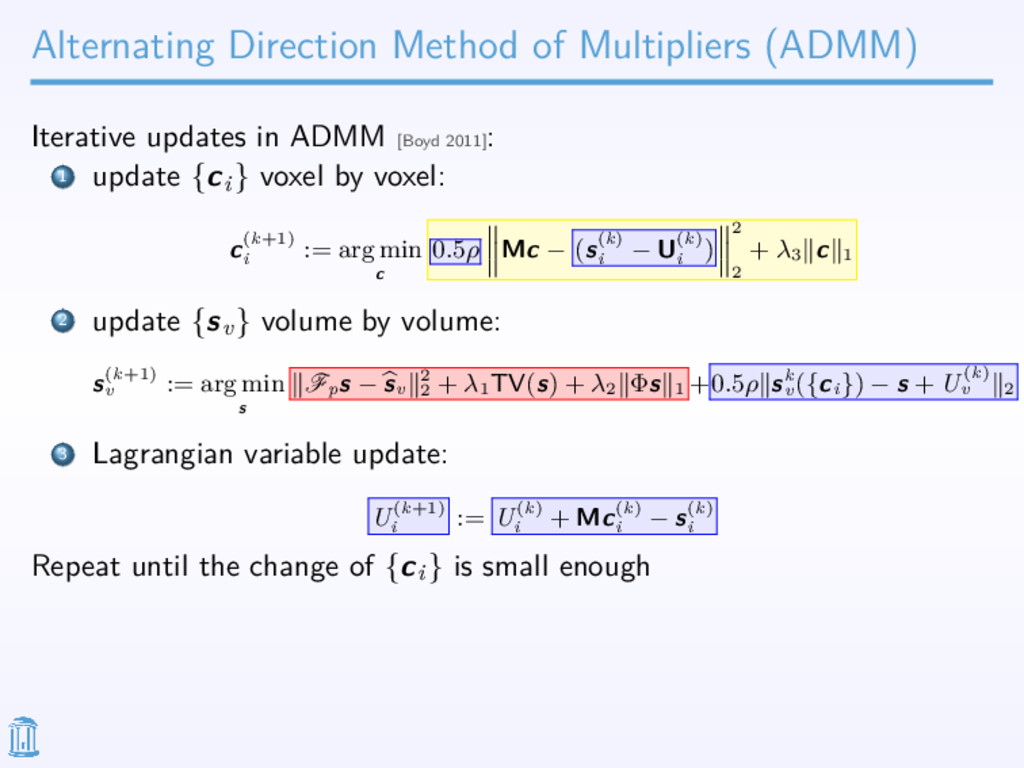
[Boyd 2011] : 1 update {ci} voxel by voxel: c(k+1) i := arg min c 0.5ρ Mc − (s(k) i − U(k) i ) 2 2 + λ3 c 1 2 update {sv} volume by volume: s(k+1) v := arg min s Fp s − sv 2 2 + λ1 TV(s) + λ2 Φs 1 +0.5ρ sk v ({ci}) − s + U(k) v 2 3 Lagrangian variable update: U(k+1) i := U(k) i + Mc(k) i − s(k) i Repeat until the change of {ci} is small enough
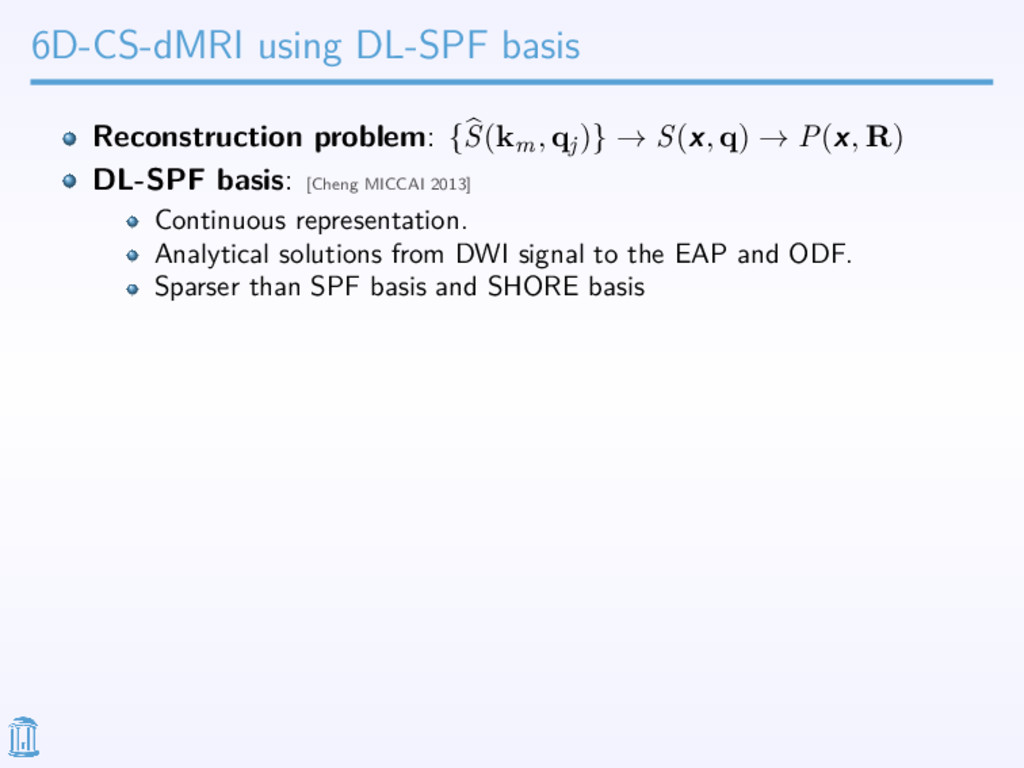
q) → P(x, R) DL-SPF basis: [Cheng MICCAI 2013] Continuous representation. Analytical solutions from DWI signal to the EAP and ODF. Sparser than SPF basis and SHORE basis
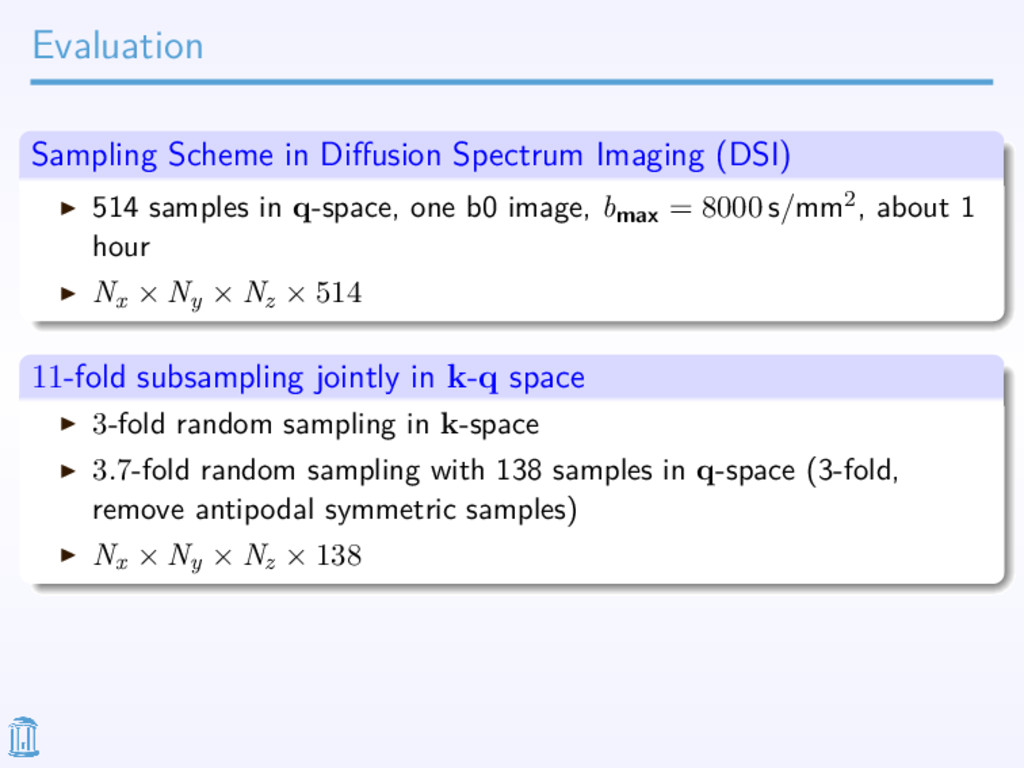
samples in q-space, one b0 image, bmax = 8000 s/mm2, about 1 hour I Nx × Ny × Nz × 514 11-fold subsampling jointly in k-q space I 3-fold random sampling in k-space I 3.7-fold random sampling with 138 samples in q-space (3-fold, remove antipodal symmetric samples) I Nx × Ny × Nz × 138
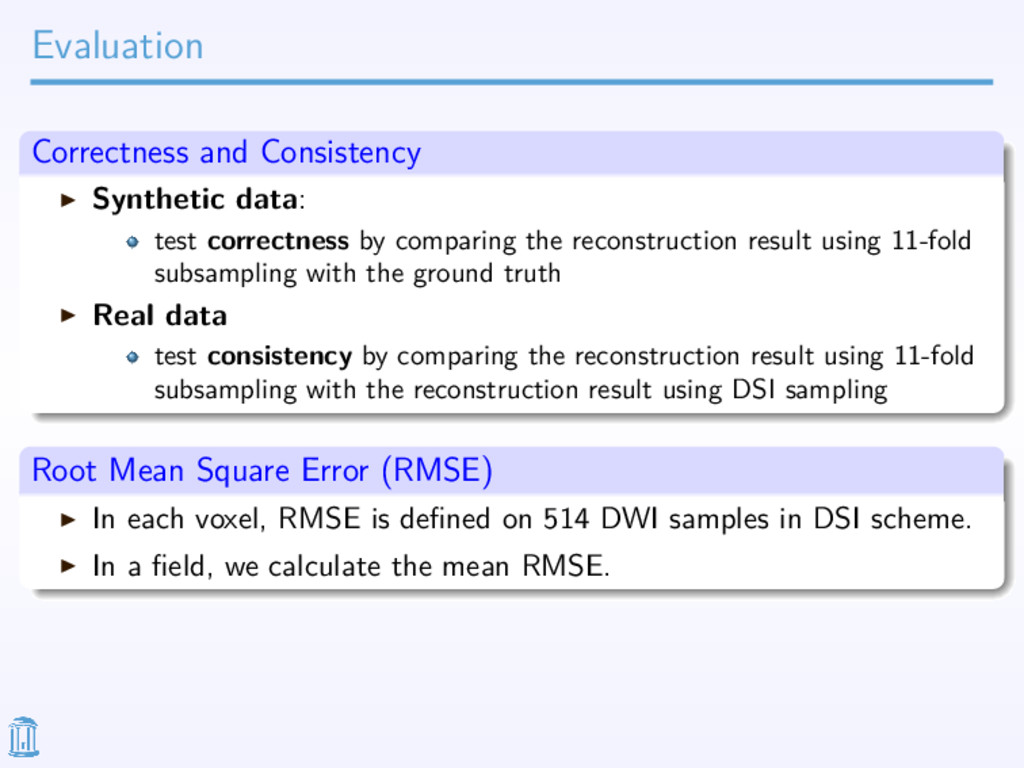
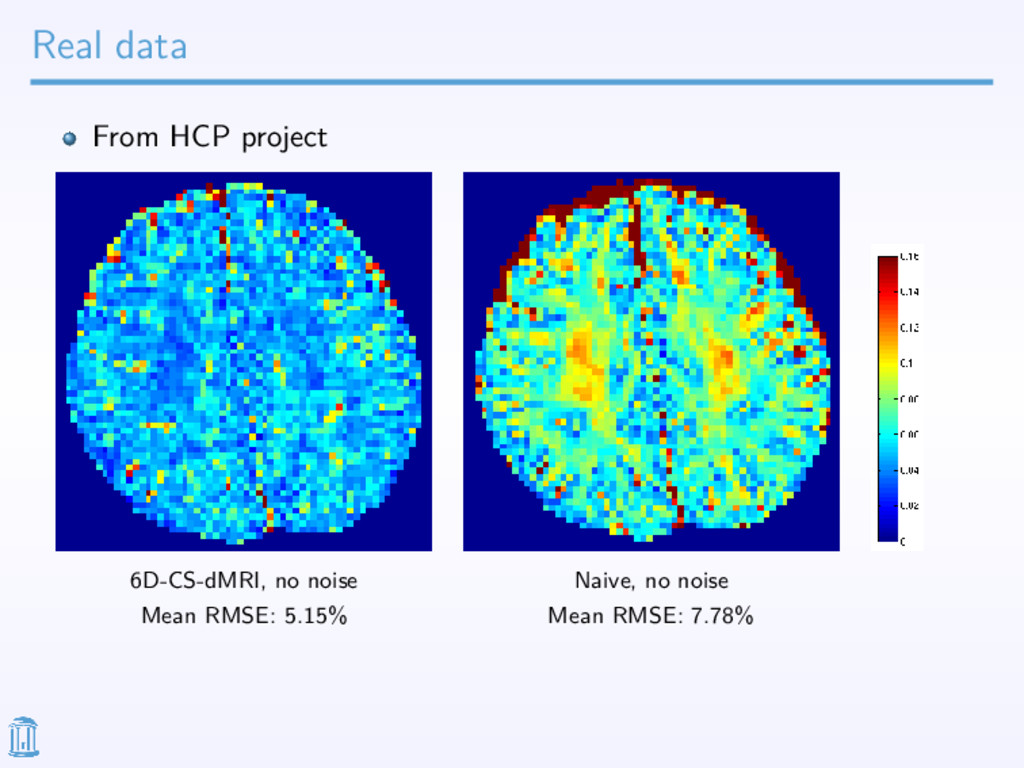
comparing the reconstruction result using 11-fold subsampling with the ground truth I Real data test consistency by comparing the reconstruction result using 11-fold subsampling with the reconstruction result using DSI sampling Root Mean Square Error (RMSE) I In each voxel, RMSE is defined on 514 DWI samples in DSI scheme. I In a field, we calculate the mean RMSE.
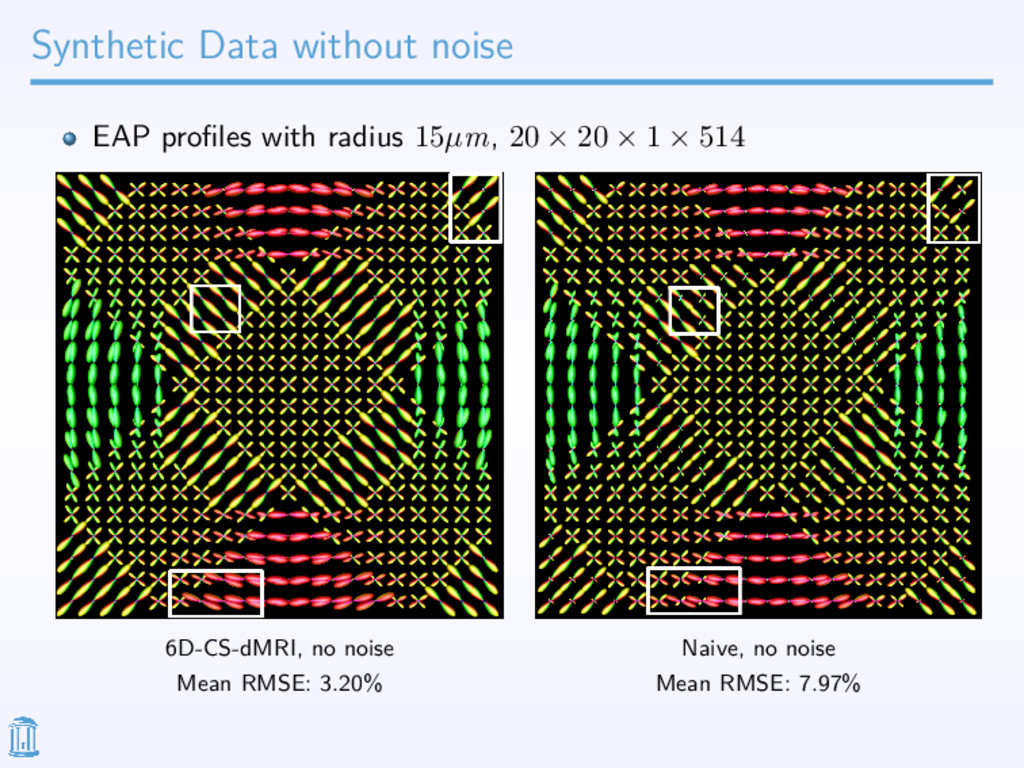
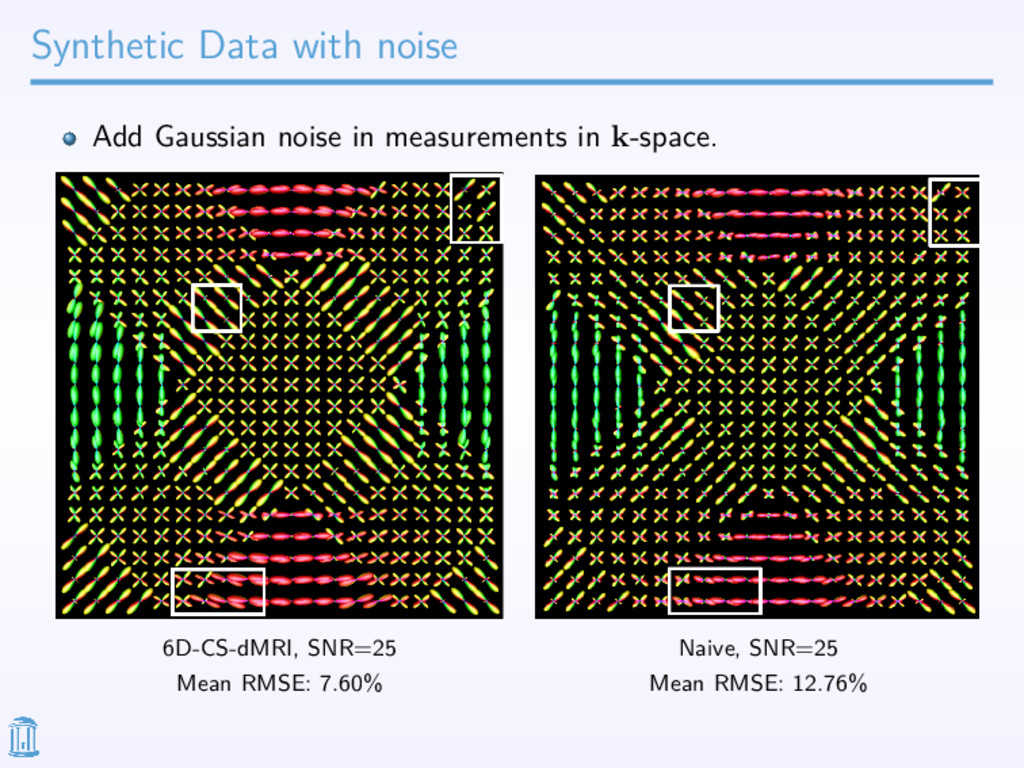
signal and propagator in joint k-q space. 6D-CS-dMRI has lower RMSE and more robust to noise than its naive way. 6D-CS-dMRI achieves RMSE about 5% by using 11-fold subsampling in k-q space. Future work: Acquire raw complex data in k-space. Sampling scheme in q-space: a subset of DSI scheme → multi-shell uniform sampling scheme. (poster id: 2558. Wednesday, 4pm-6pm. MICCAI 2014) Efficient implementation: parallel in different volumes and different voxels
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}