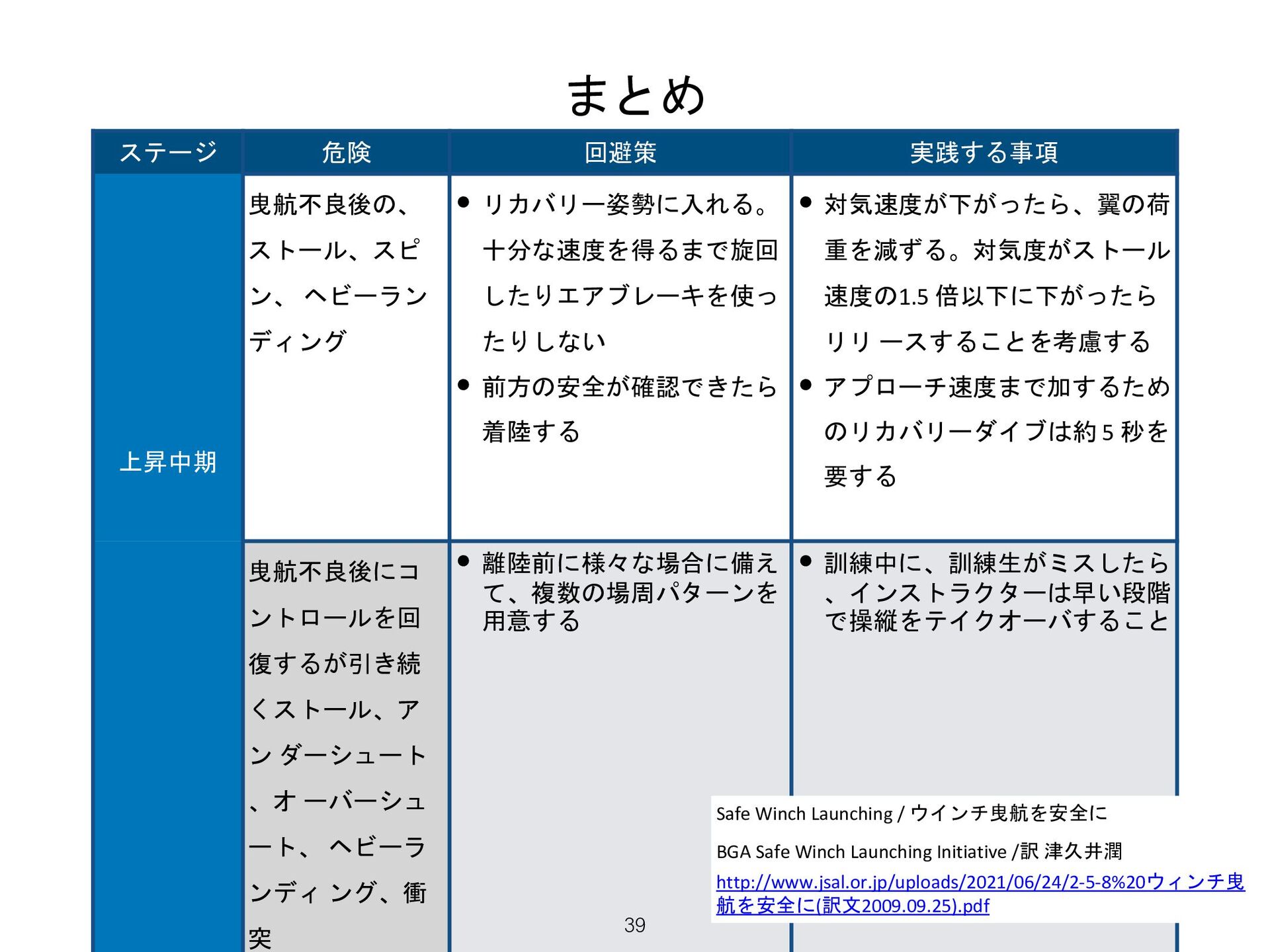
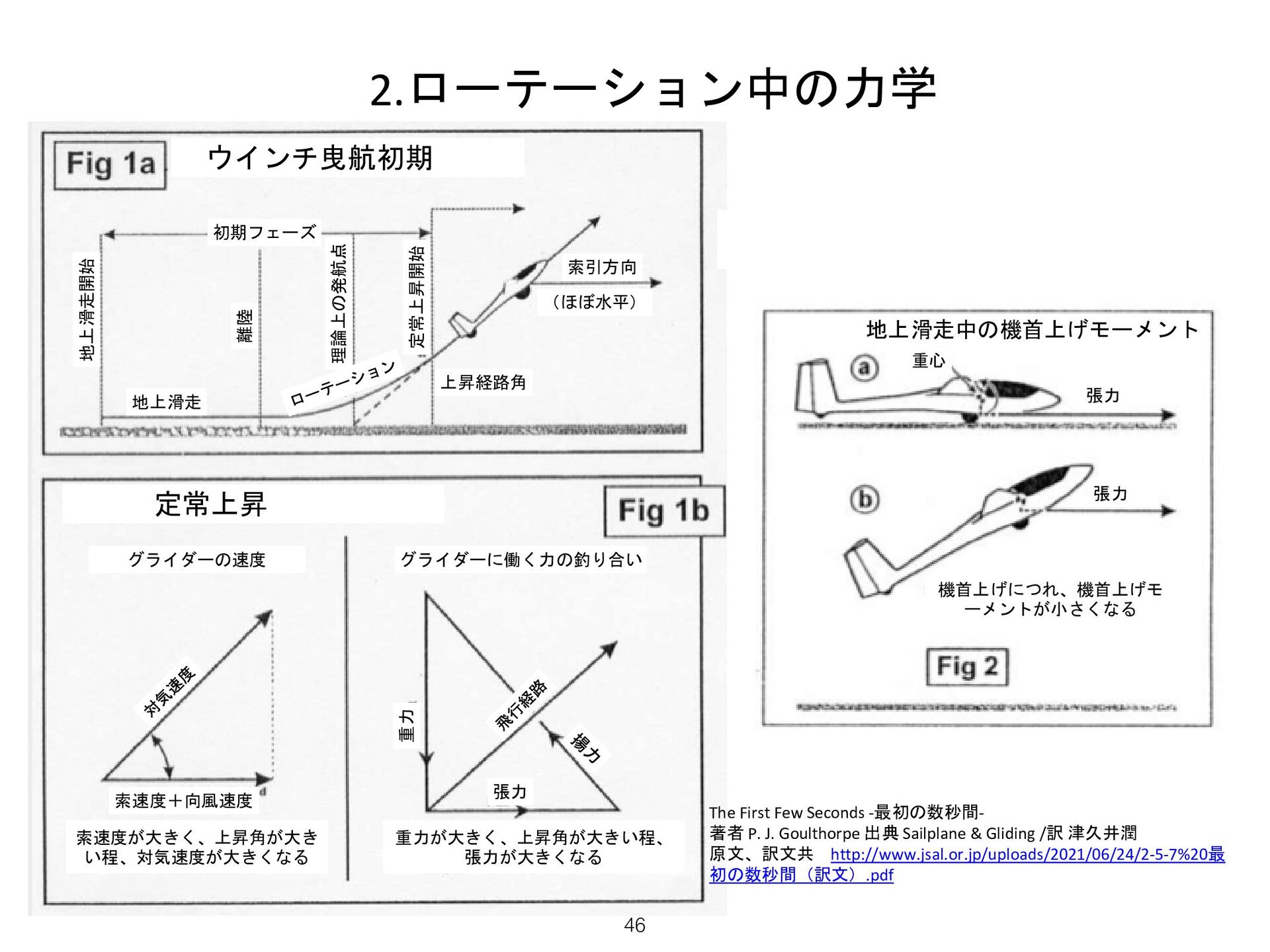
向に働くため、機首上げのモーメントが発生する。もし、パイロットがこれ を認識していなければ、離陸速度に達するや否や過度の機首上げが起こる( 図2a)。 索の張力はそのうち重心の近くを通り、不必要な機首上 げモーメン トを減らし、そしてグライダはコントロールを取り戻す(図2b)。 48 The First Few Seconds -最初の数秒間- 著者 P. J. Goulthorpe 出典 Sailplane & Gliding /訳 津久井潤 原文、訳文共 http://www.jsal.or.jp/uploads/2021/06/24/2-5-7%20最初の数秒間(訳文).pdf
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}