Share
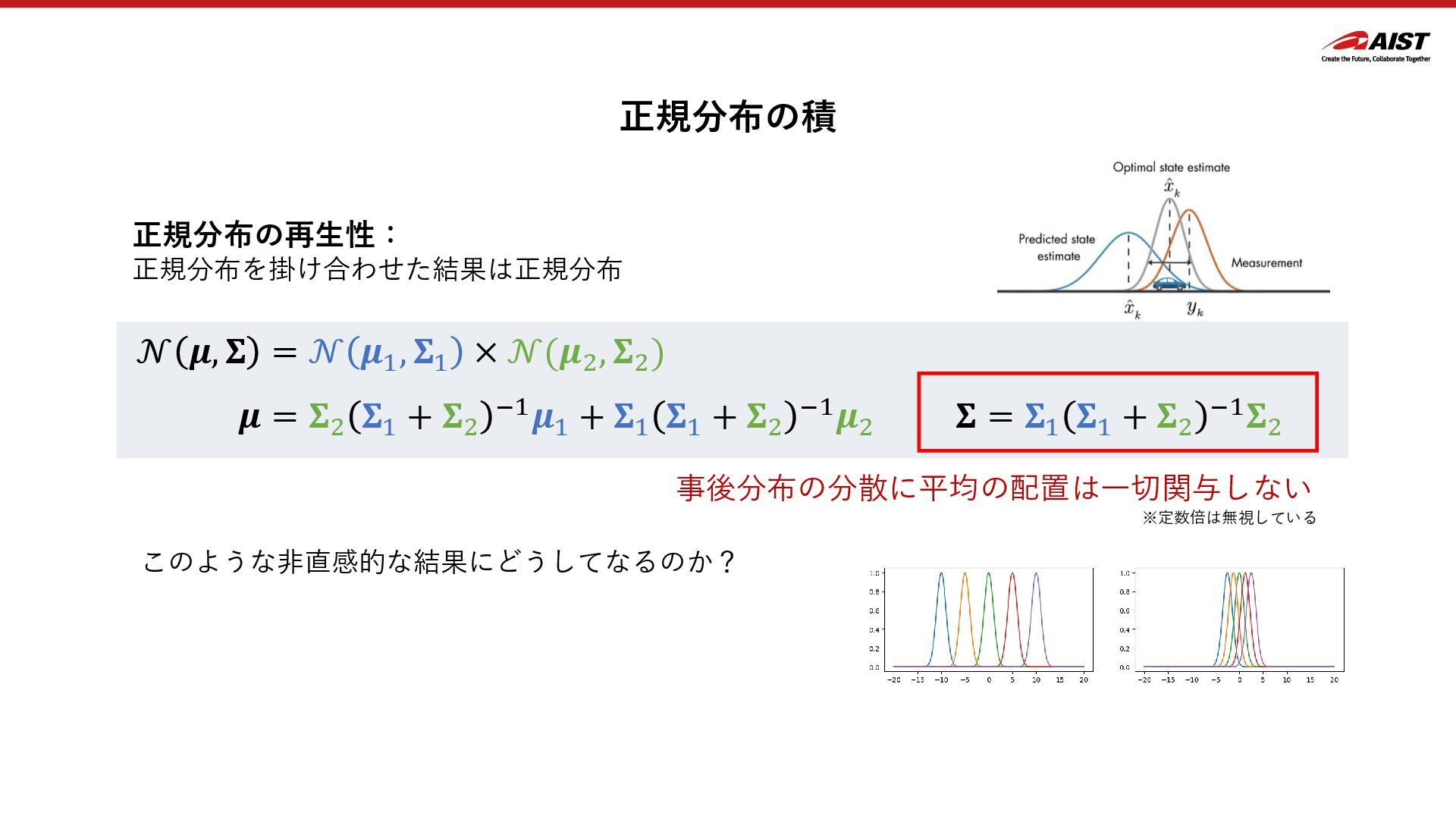
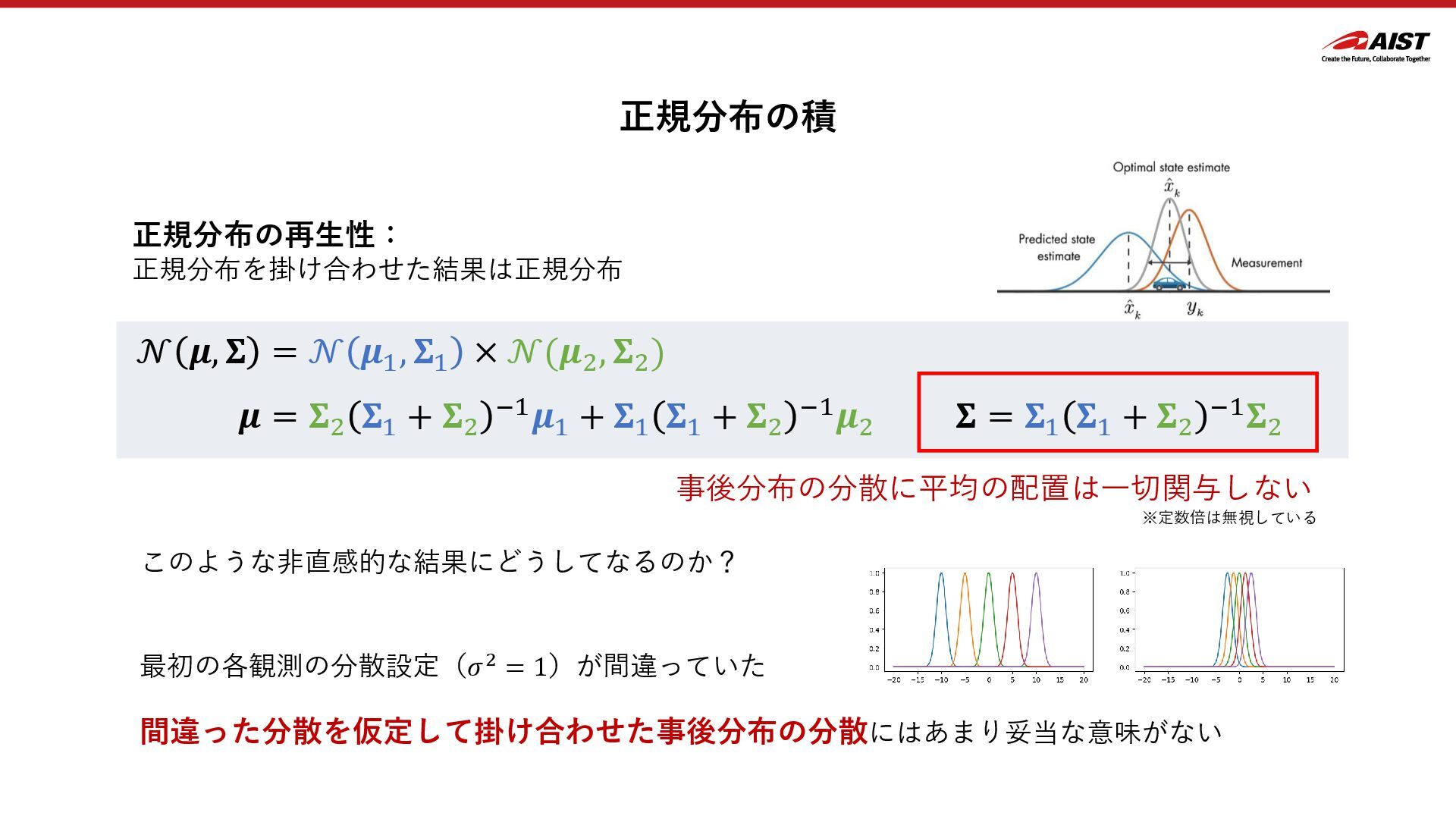
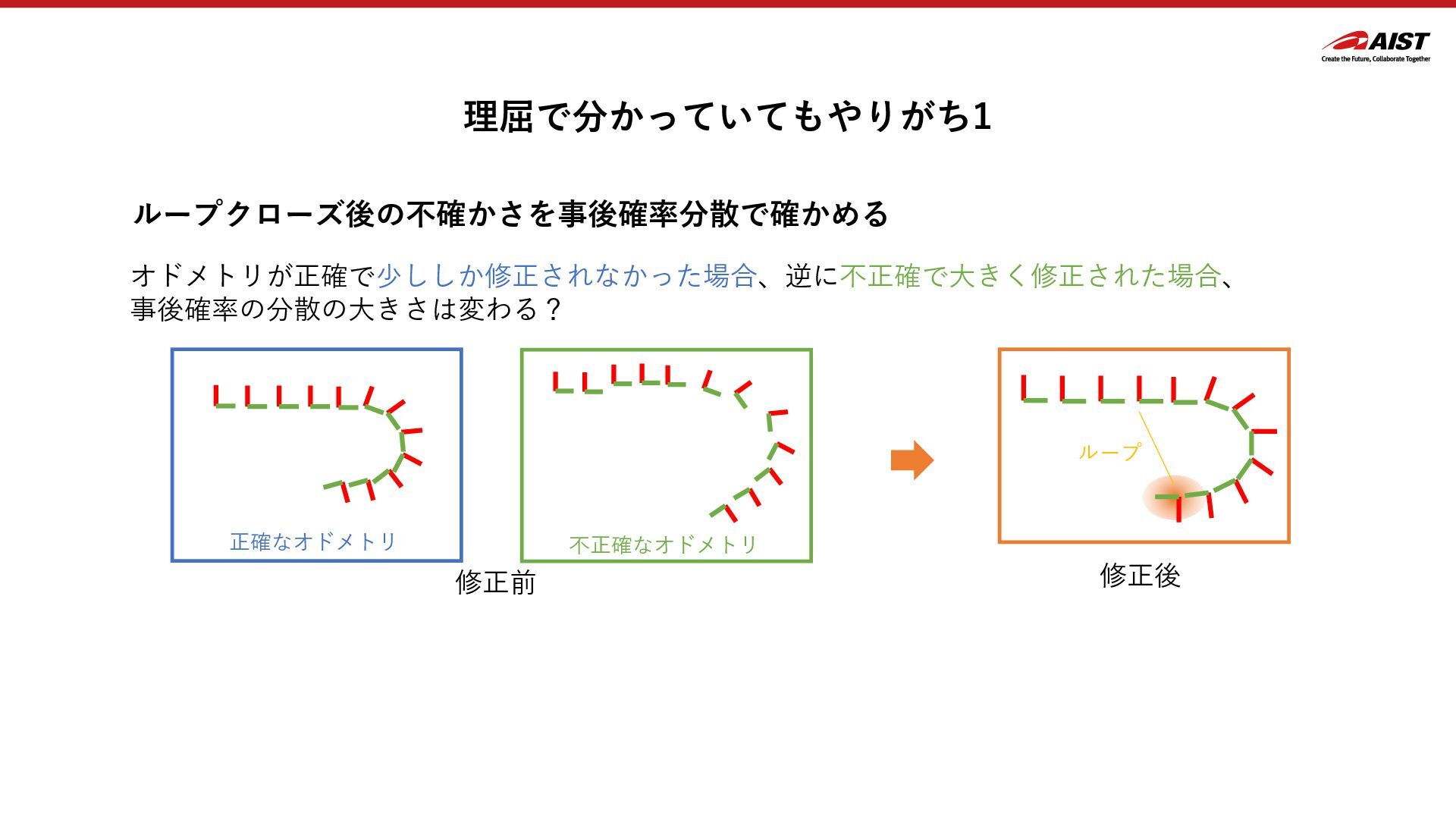
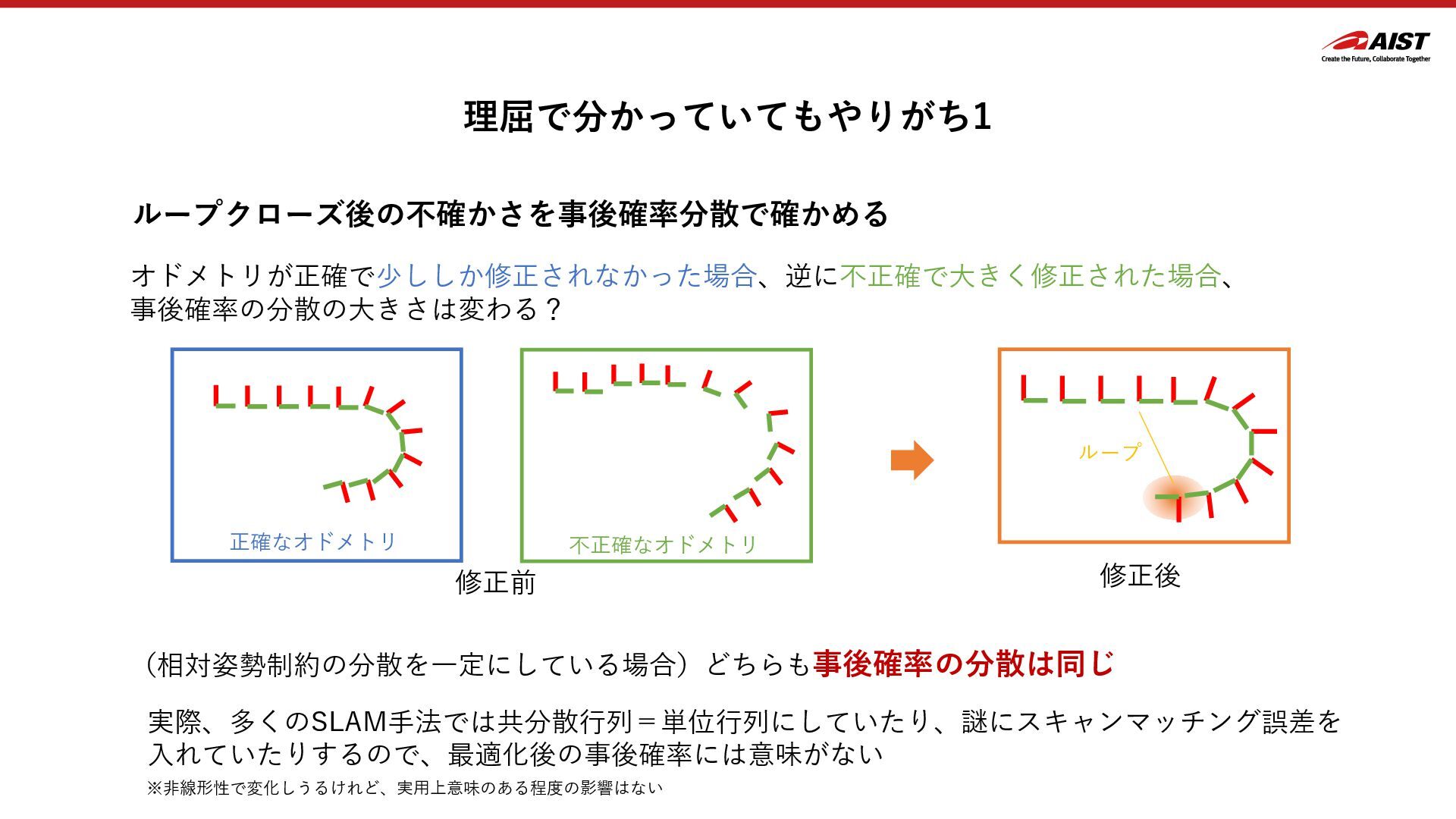
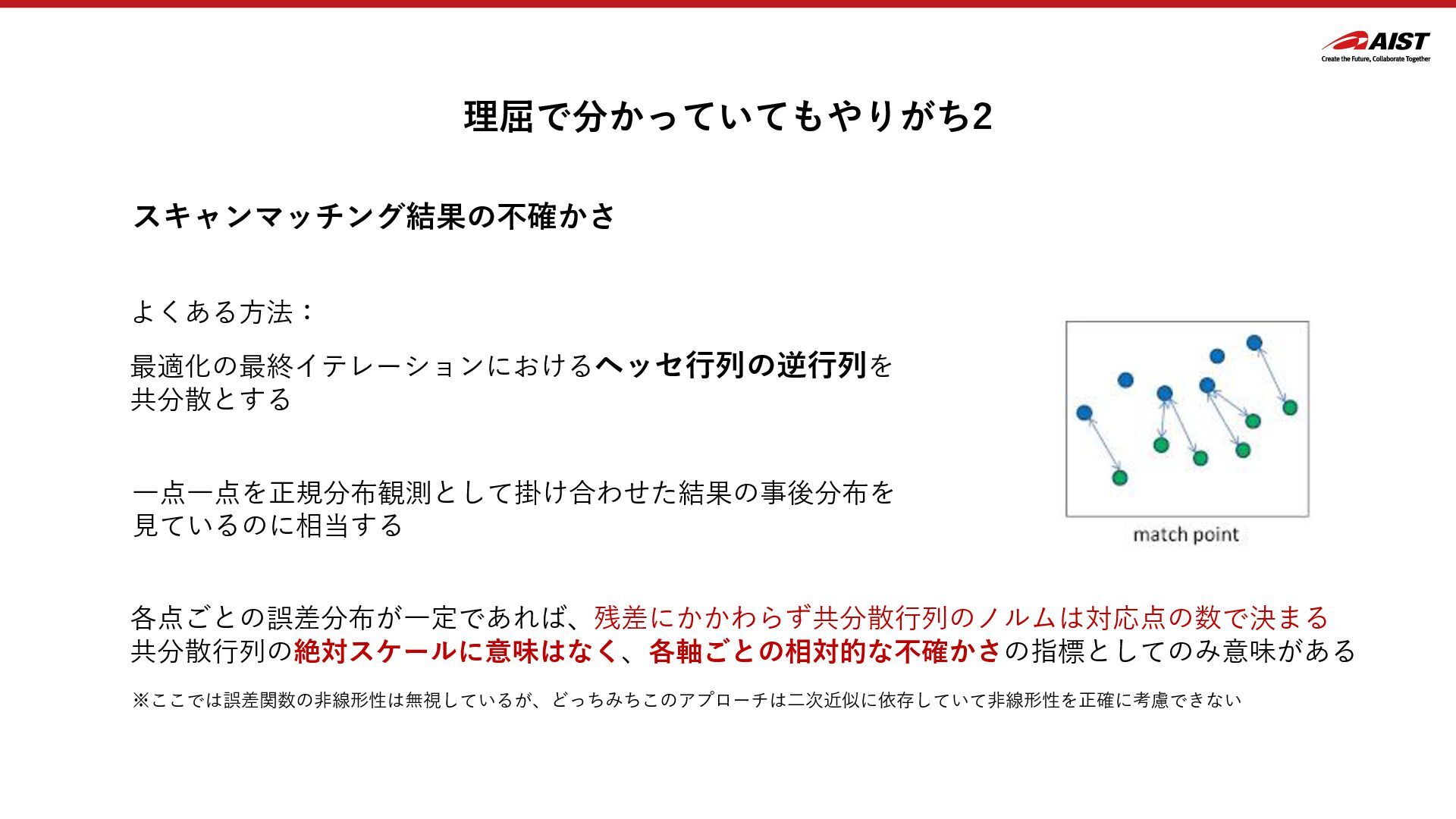
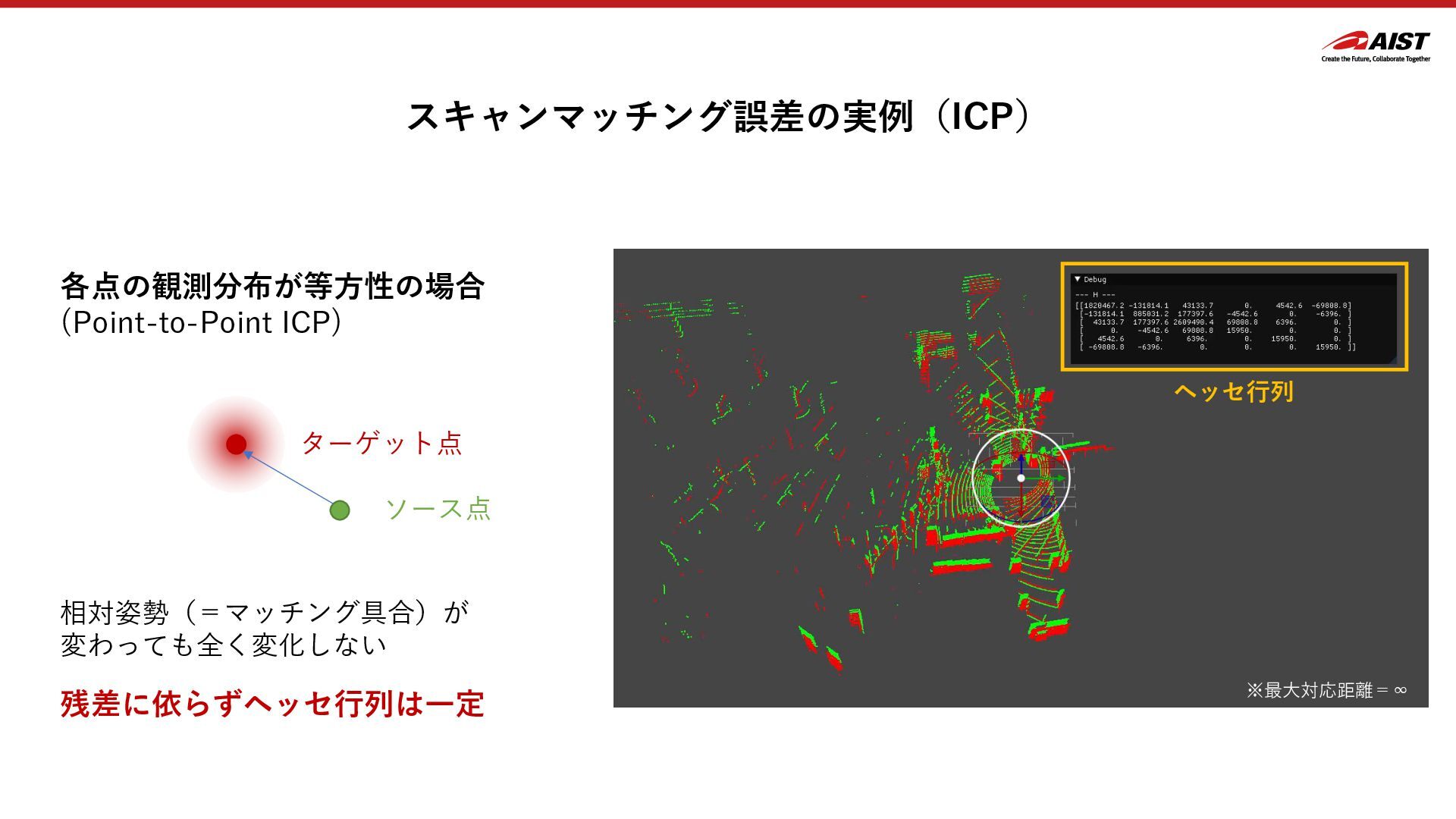
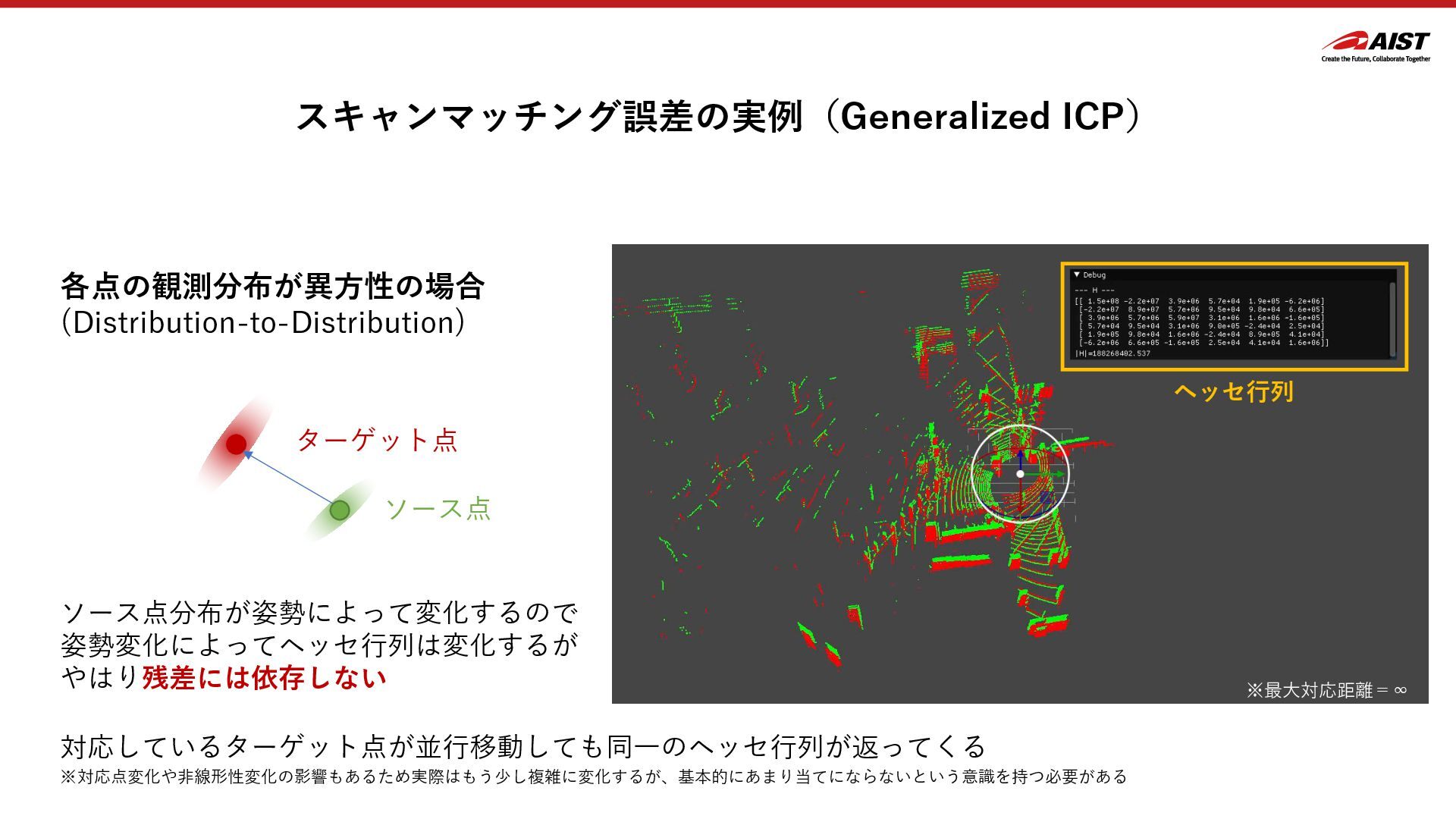
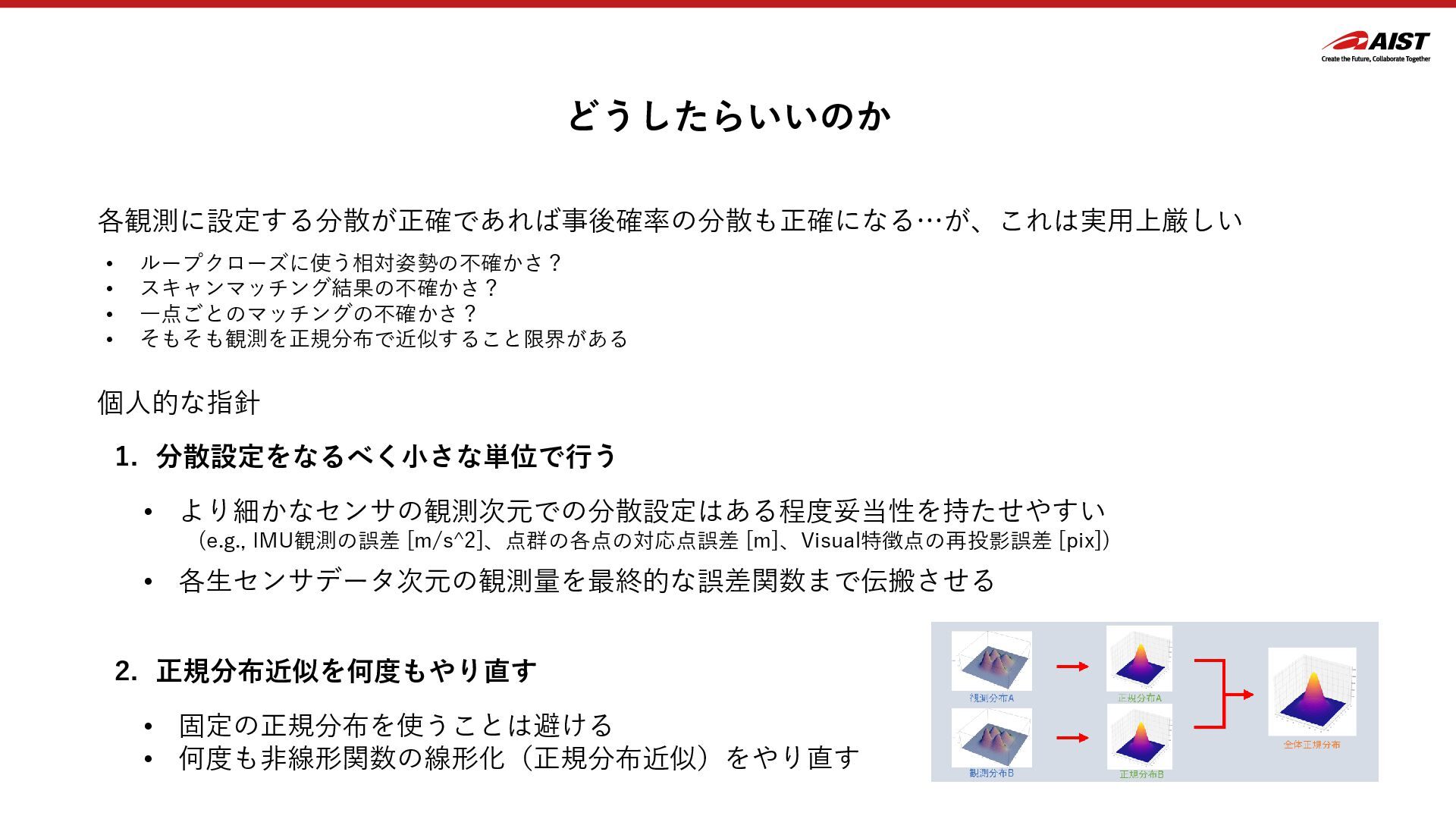
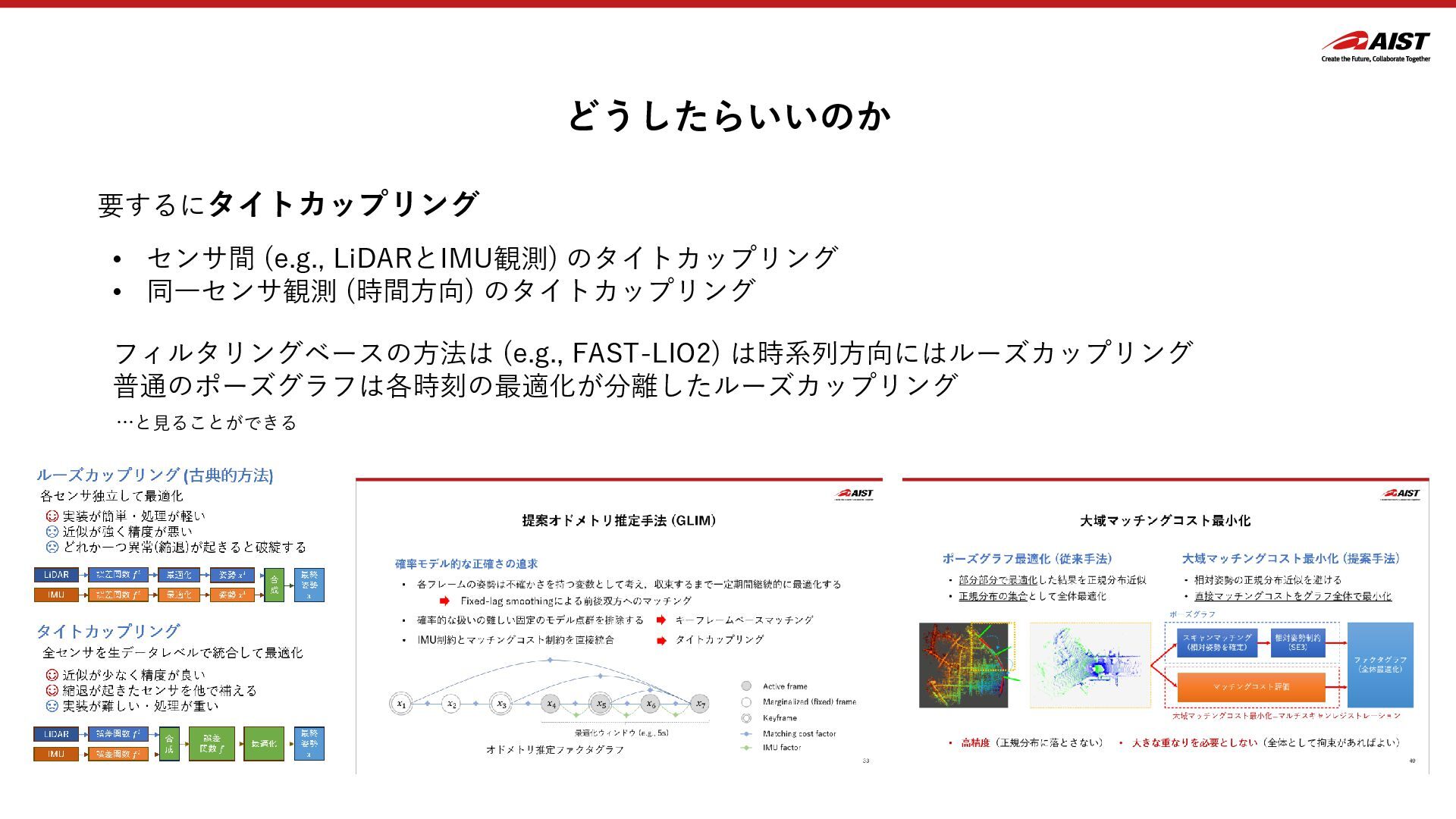
内部学生向けの勉強資料です。 最尤推定結果の共分散行列を利用することに関する問題点などの説明です。 無批判にスキャンマッチング結果のヘッセ行列から姿勢誤差分布を求めるのは良くないというような話です。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}