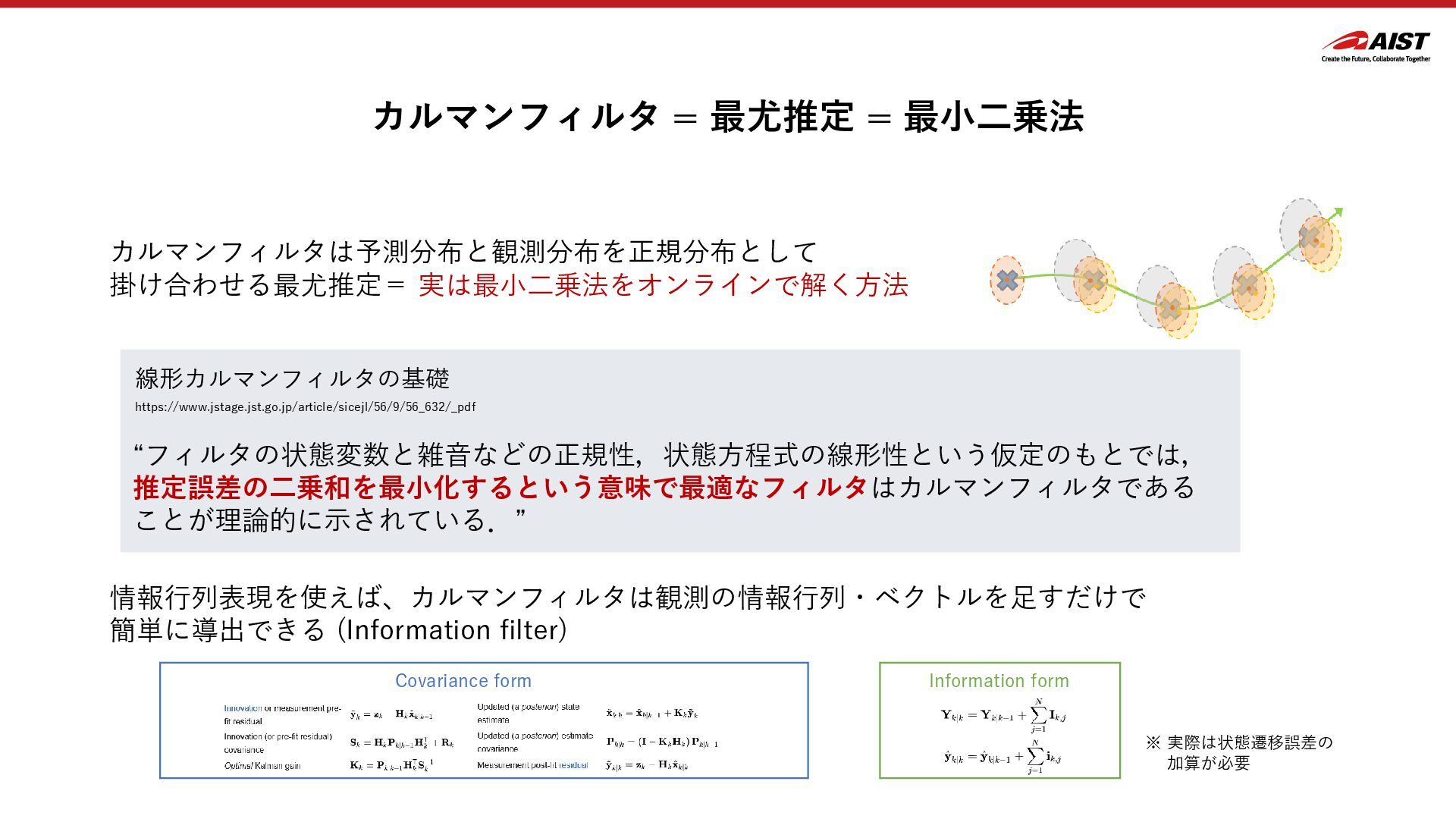
“フィルタの状態変数と雑音などの正規性,状態方程式の線形性という仮定のもとでは, 推定誤差の二乗和を最小化するという意味で最適なフィルタはカルマンフィルタである ことが理論的に示されている.” 情報行列表現を使えば、カルマンフィルタは観測の情報行列・ベクトルを足すだけで 簡単に導出できる (Information filter) Covariance form Information form ※ 実際は状態遷移誤差の 加算が必要
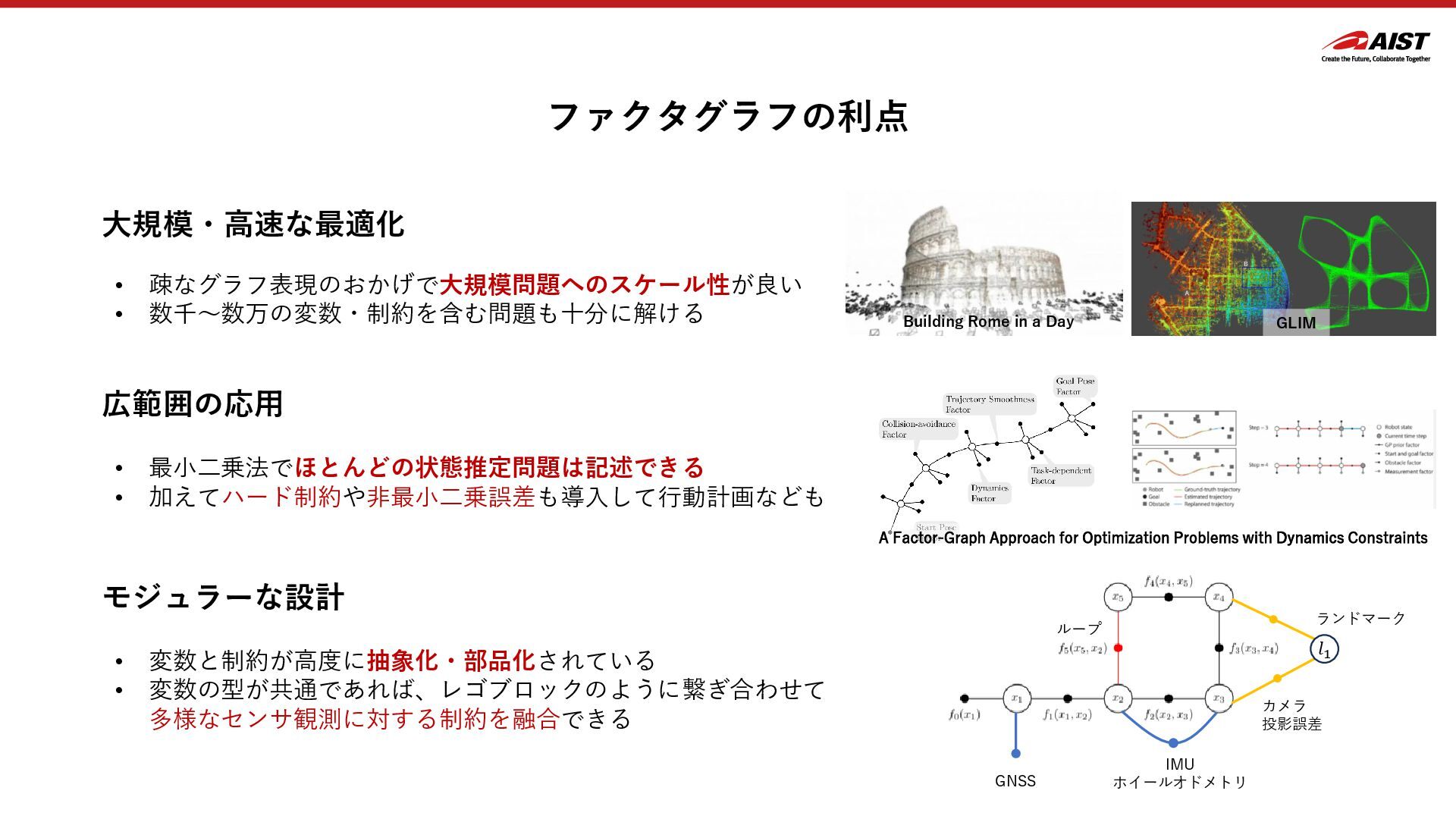
• 加えてハード制約や非最小二乗誤差も導入して行動計画なども • 変数と制約が高度に抽象化・部品化されている • 変数の型が共通であれば、レゴブロックのように繋ぎ合わせて 多様なセンサ観測に対する制約を融合できる GNSS IMU ホイールオドメトリ ループ 𝑙1 ランドマーク カメラ 投影誤差 GLIM Building Rome in a Day A Factor-Graph Approach for Optimization Problems with Dynamics Constraints
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}