Upgrade to Pro
— share decks privately, control downloads, hide ads and more …
Speaker Deck
Features
Speaker Deck
PRO
Sign in
Sign up for free
Search
Search
Pythonではじめる農業ロボット開発
Search
Makoto Koike
November 20, 2021
Technology
1.9k
0
Share
Embed
Copy iframe code
Copy JS code
Copy link
Start on current slide
Pythonではじめる農業ロボット開発
#2021/11/20 PyCon mini Shizuoka 2021
Makoto Koike
November 20, 2021
More Decks by Makoto Koike
See All by Makoto Koike
Meta AIのSegment Anything Model (SAM) が色々便利そうな話
koike91
0
840
Pythonで不均衡で一貫性のないデータセットを少しだけマシにする話
koike91
1
2.4k
Other Decks in Technology
See All in Technology
変更し続けられるシステムをどう保つか — AI時代のSSoTという設計原則
kawauso
1
1.1k
kaonavi Tech Night#1
kaonavi
0
160
大量データに対しても、生成AIを用いてリーズナブルにデータ加工をしたい!Databricksのai_queryについて調べてみた
kamoshika
1
280
仕様駆動開発、導入半年。「本当に速くなってるの?」にデータで答える / AICon2026_hirakawa
rakus_dev
0
320
Oracle Base Database Service 技術詳細
oracle4engineer
PRO
15
110k
非定型なドキュメントを効率よくリファクタする 〜えぇ!?仕様書27本の移行が1日で終わったって!?〜
subroh0508
2
620
SRENEXT_2026_Chairs__Talks_in_Tamachi.sre.pdf
srenext
1
150
アップデートで何が変わった?デモで学んで使いこなすIBM Bob2.0
muehara
0
230
事業成長とAI活用を止めないデータ基盤アーキテクチャの設計思想
hiracky16
0
540
「顧客の声を聞かなければ何も始まらない」 ── 顧客の声から生まれた『AI返信補助機能』の開発プロセス / AICon2026_shikata_imai
rakus_dev
1
270
それでも、技術なブログを書く理由 #kichijojipm / Why I Still Write Tech Blogs Even Now
shinkufencer
0
490
Playwright × AI Agent でE2Eテストはどう変わるか AI駆動テストの可能性と実用検証の結果
taiga7543
2
810
Featured
See All Featured
The Web Performance Landscape in 2024 [PerfNow 2024]
tammyeverts
12
1.2k
実際に使うSQLの書き方 徹底解説 / pgcon21j-tutorial
soudai
PRO
201
75k
Keith and Marios Guide to Fast Websites
keithpitt
413
23k
Stop Working from a Prison Cell
hatefulcrawdad
274
21k
The Invisible Side of Design
smashingmag
301
52k
Jamie Indigo - Trashchat’s Guide to Black Boxes: Technical SEO Tactics for LLMs
techseoconnect
PRO
0
510
How to build a perfect <img>
jonoalderson
1
5.8k
Chrome DevTools: State of the Union 2024 - Debugging React & Beyond
addyosmani
10
1.3k
Improving Core Web Vitals using Speculation Rules API
sergeychernyshev
21
1.5k
Technical Leadership for Architectural Decision Making
baasie
3
440
Art, The Web, and Tiny UX
lynnandtonic
304
22k
Hiding What from Whom? A Critical Review of the History of Programming languages for Music
tomoyanonymous
3
1k
Transcript
Pythonではじめる 農業ロボット開発 #2021/11/20 PyCon mini Shizuoka 2021
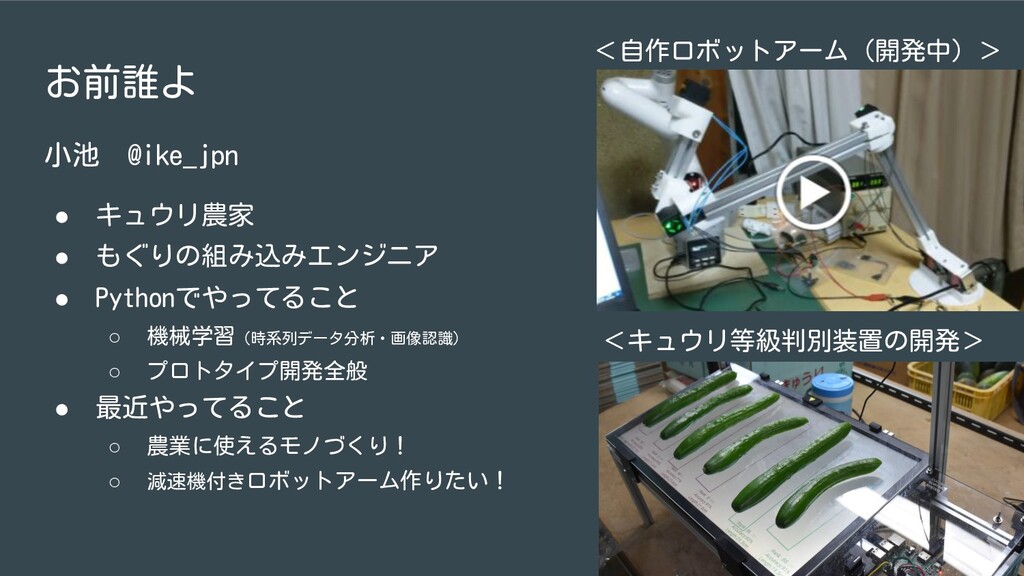
お前誰よ 小池 @ike_jpn • キュウリ農家 • もぐりの組み込みエンジニア • Pythonでやってること ◦ 機械学習(時系列データ分析・画像認識)
◦ プロトタイプ開発全般 • 最近やってること ◦ 農業に使えるモノづくり! ◦ 減速機付きロボットアーム作りたい! <キュウリ等級判別装置の開発> <自作ロボットアーム(開発中)>
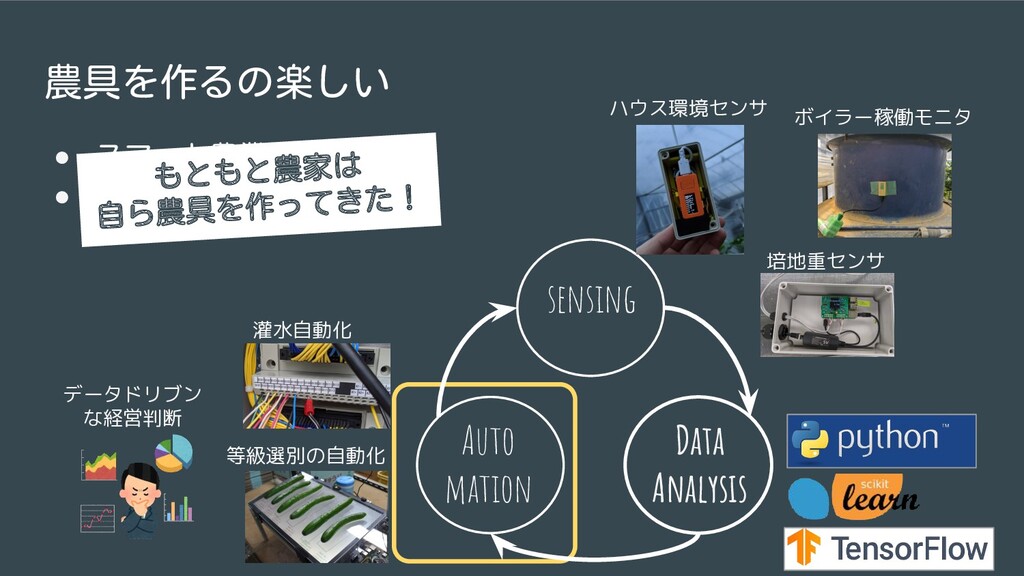
• スマート農業 • 自動化&効率化 農具を作るの楽しい Data Analysis sensing Auto mation
ハウス環境センサ 培地重センサ ボイラー稼働モニタ 等級選別の自動化 灌水自動化 データドリブン な経営判断 もともと農家は 自ら農具を作ってきた!
最近70歳近くになる母が作った農具
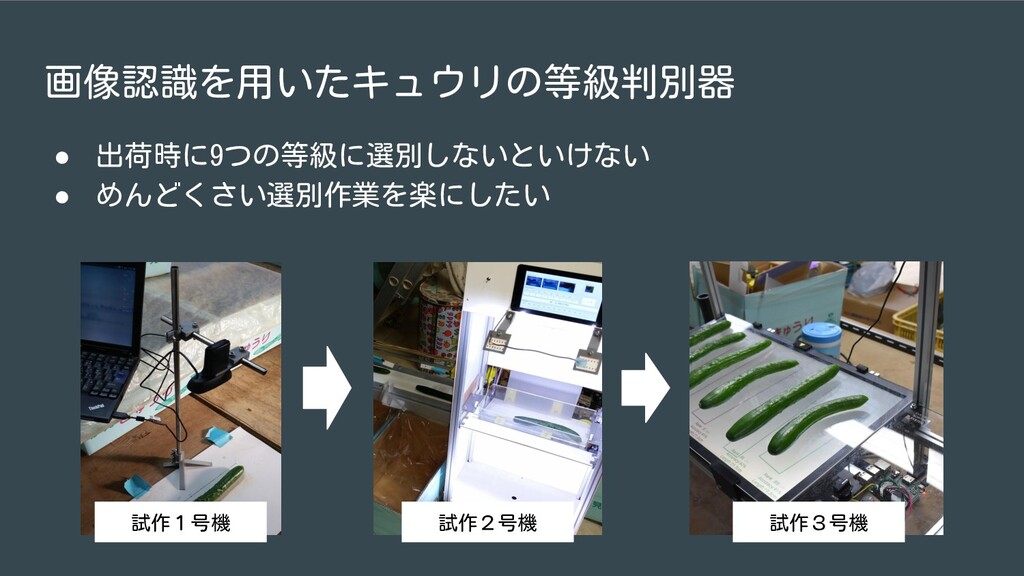
画像認識を用いたキュウリの等級判別器 • 出荷時に9つの等級に選別しないといけない • めんどくさい選別作業を楽にしたい 試作1号機 試作2号機 試作3号機
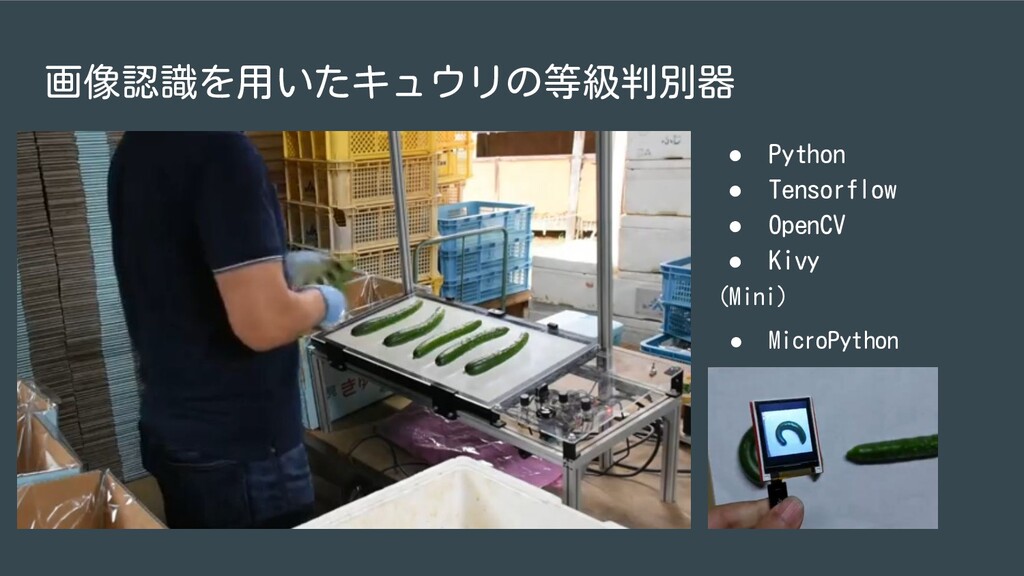
画像認識を用いたキュウリの等級判別器 • Python • Tensorflow • OpenCV • Kivy (Mini)
• MicroPython
https://www.donkeycar.com/ 草取りドンキーカー • Python • Tensorflow • OpenCV • Tornado
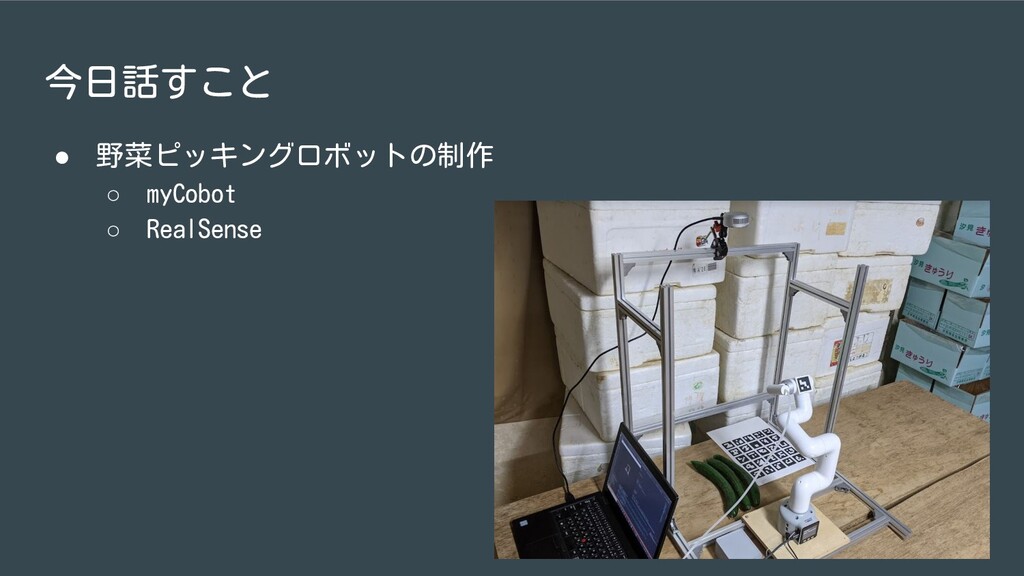
今日話すこと • 野菜ピッキングロボットの制作 ◦ myCobot ◦ RealSense
話さないこと なんでROS使わないんですか?
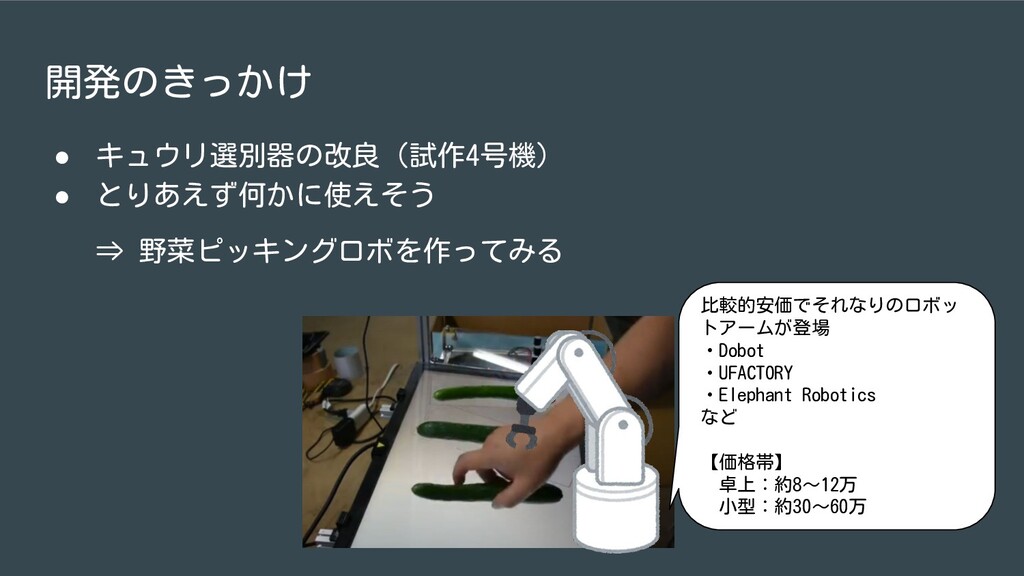
開発のきっかけ • キュウリ選別器の改良(試作4号機) • とりあえず何かに使えそう ⇒ 野菜ピッキングロボを作ってみる 比較的安価でそれなりのロボッ トアームが登場 ・Dobot
・UFACTORY ・Elephant Robotics など 【価格帯】 卓上:約8~12万 小型:約30~60万
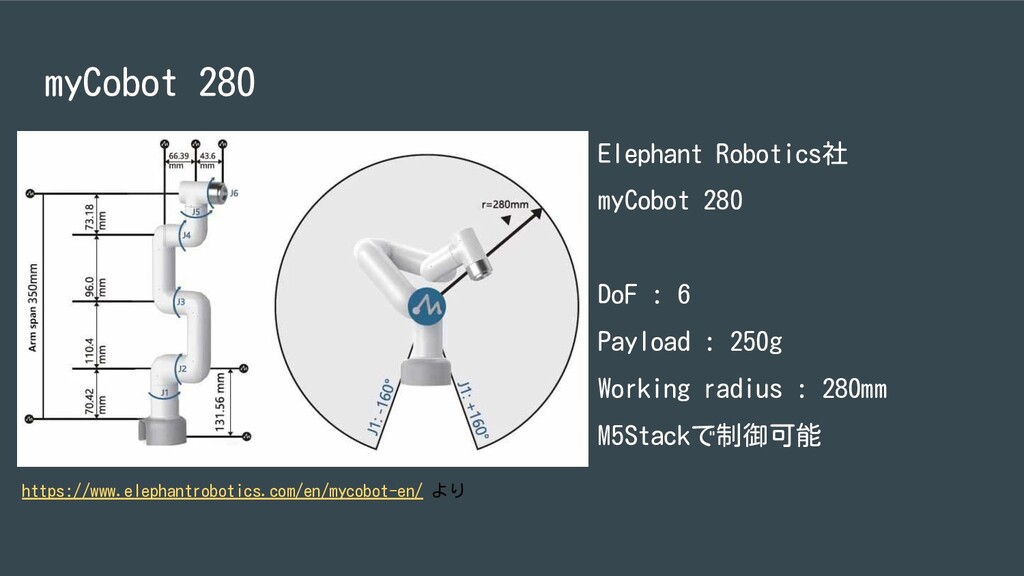
myCobot 280 Elephant Robotics社 myCobot 280 DoF : 6 Payload
: 250g Working radius : 280mm M5Stackで制御可能 https://www.elephantrobotics.com/en/mycobot-en/ より
myCobotのセットアップ • 台座を付ける • ファームウェアの書き換え ◦ MyStudioを使ってTransponderを書き込む ◦ (参考)「myCobotのすべて」からあげ氏 ▪
https://zenn.dev/karaage0703/books/3be6bad93b0c8e • pymycobotのインストール $pip install pymycobot 開発用PC myCobot serial on USB
ロボットの眼 Intel RealSense L515 depth range : 0.25 -
9.0m depth resolution : 1024x768 RGB resolution : 1920x1080 ※残念ながら2022年2月をもってL,F,Tシリーズはディ スコンになることがIntelよりアナウンスされました 代わりにDシリーズを使ってとのことです. https://www.intelrealsense.com/message-to-customers/
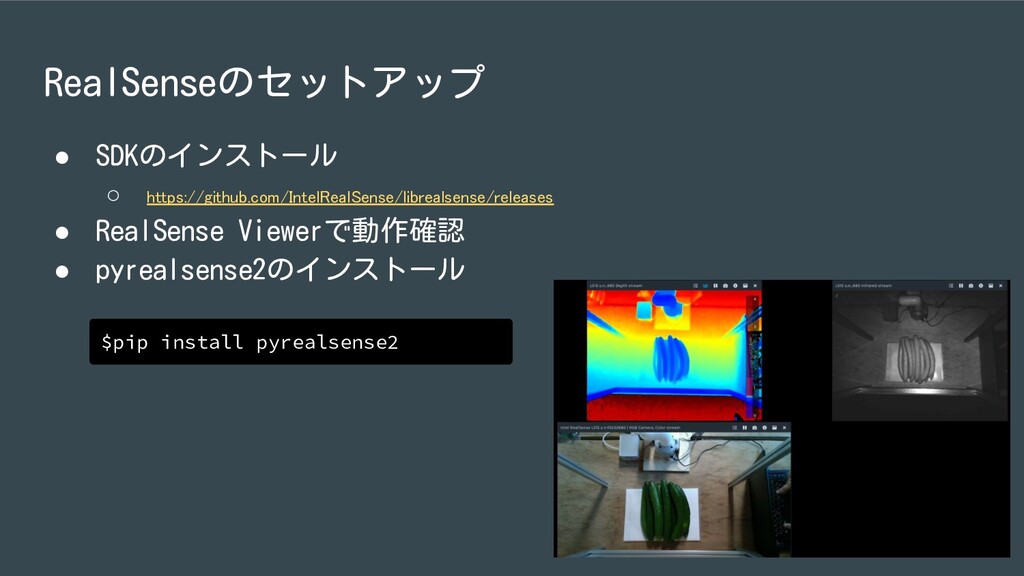
RealSenseのセットアップ • SDKのインストール ◦ https://github.com/IntelRealSense/librealsense/releases • RealSense Viewerで動作確認 • pyrealsense2のインストール
$pip install pyrealsense2
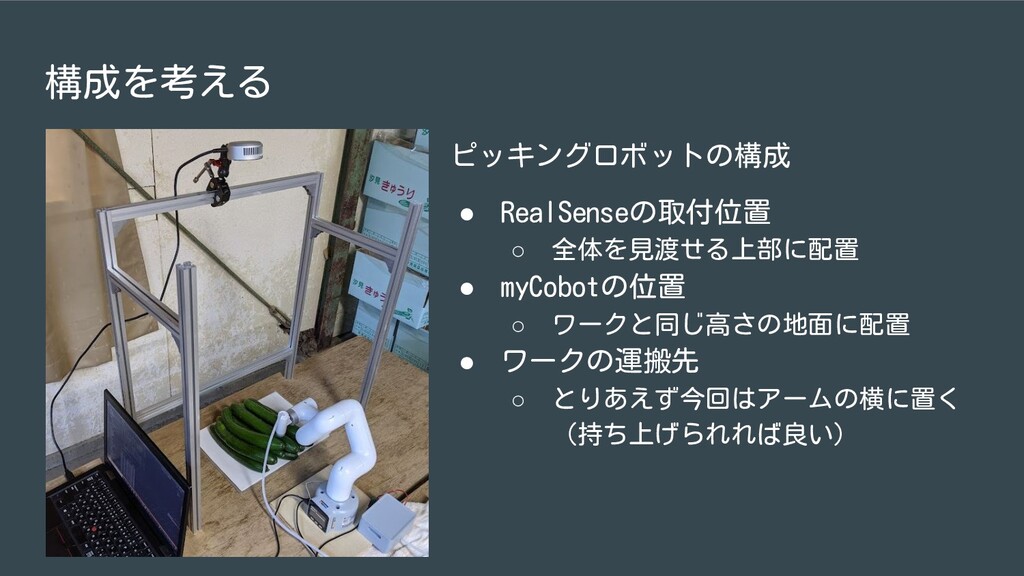
構成を考える ピッキングロボットの構成 • RealSenseの取付位置 ◦ 全体を見渡せる上部に配置 • myCobotの位置 ◦ ワークと同じ高さの地面に配置
• ワークの運搬先 ◦ とりあえず今回はアームの横に置く (持ち上げられれば良い)
• AR(ArUco)マーカで地面とアーム先端の初期位置を検出 RealSenseによる座標系の検出(1) 画像からARマーカーを使って,カメラに対する地 面座標の回転を計測することで,地面に対するカ メラの姿勢が分かる.
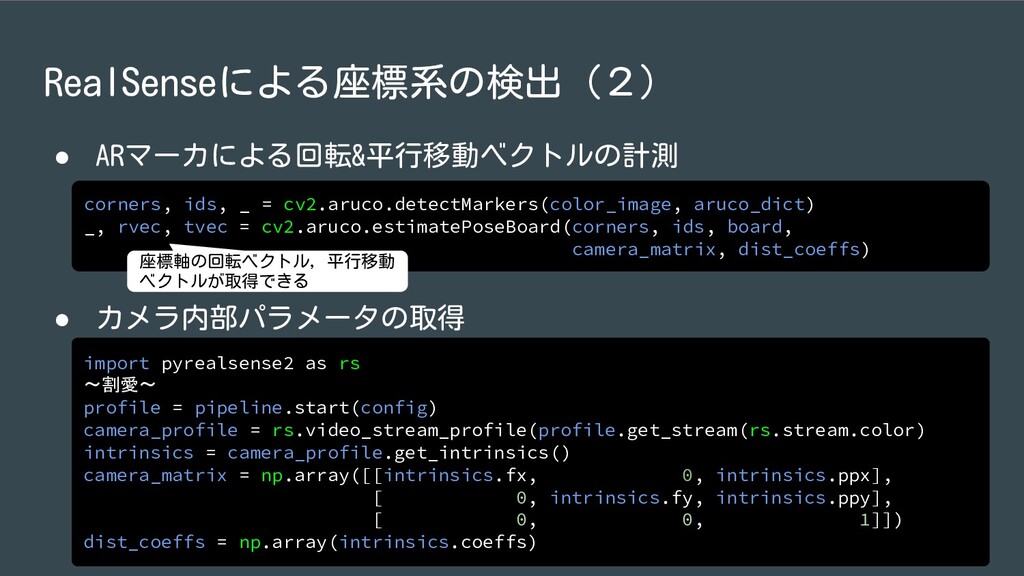
RealSenseによる座標系の検出(2) • ARマーカによる回転&平行移動ベクトルの計測 corners, ids, _ = cv2.aruco.detectMarkers(color_image, aruco_dict) _,
rvec, tvec = cv2.aruco.estimatePoseBoard(corners, ids, board, camera_matrix, dist_coeffs) • カメラ内部パラメータの取得 import pyrealsense2 as rs ~割愛~ profile = pipeline.start(config) camera_profile = rs.video_stream_profile(profile.get_stream(rs.stream.color) intrinsics = camera_profile.get_intrinsics() camera_matrix = np.array([[intrinsics.fx, 0, intrinsics.ppx], [ 0, intrinsics.fy, intrinsics.ppy], [ 0, 0, 1]]) dist_coeffs = np.array(intrinsics.coeffs) 座標軸の回転ベクトル,平行移動 ベクトルが取得できる
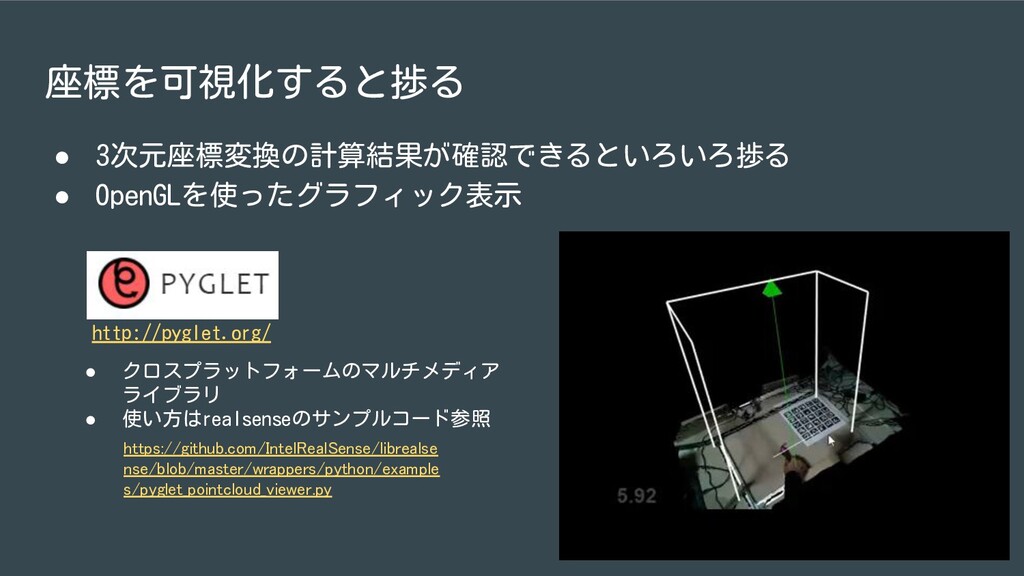
座標を可視化すると捗る • 3次元座標変換の計算結果が確認できるといろいろ捗る • OpenGLを使ったグラフィック表示 http://pyglet.org/ • クロスプラットフォームのマルチメディア ライブラリ •
使い方はrealsenseのサンプルコード参照 https://github.com/IntelRealSense/librealse nse/blob/master/wrappers/python/example s/pyglet_pointcloud_viewer.py
野菜の位置の検出 • アーム直下の地面上24cmのライン上をサーチ • 3次元カメラ座標系⇒2次元Depth画像座標系⇒3次元カメラ座標系 (将来的には,深層学習を用いて掴みやすい位置の検出までやりたい...) 野菜検出ライン[pix]
RealSenseで投影・逆投影 # 3次元カメラ座標系->2次元depth画像座標系 p0 = rs.rs2_project_point_to_pixel(depth_intrinsics, points[0]) # ライン右端 p1
= rs.rs2_project_point_to_pixel(depth_intrinsics, points[1]) # ライン左端 # 2次元depth画像座標系->3次元カメラ座標系 points = rs.rs2_deproject_pixel_to_point(depth_intrinsics, [x, y], d)
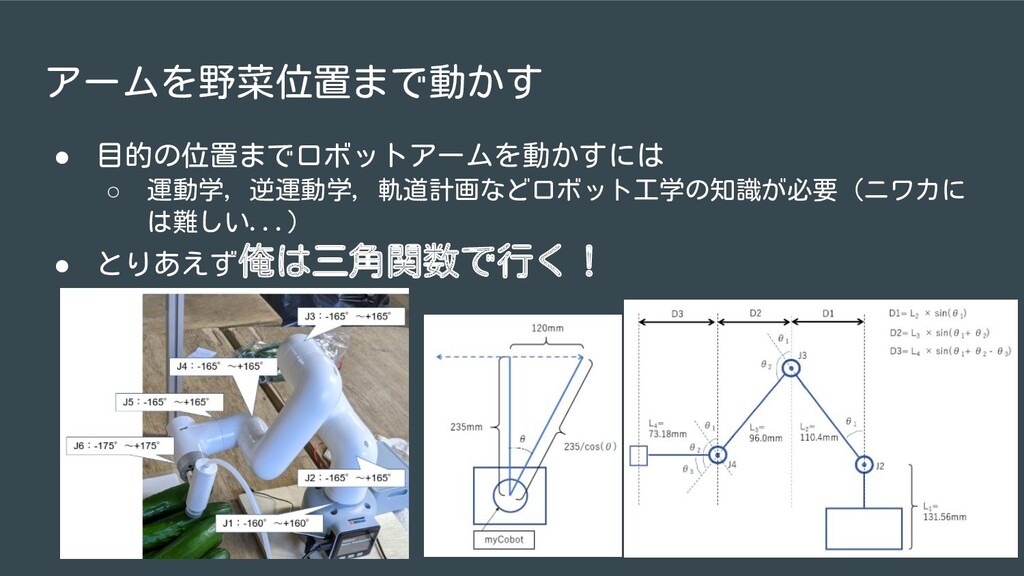
アームを野菜位置まで動かす • 目的の位置までロボットアームを動かすには ◦ 運動学,逆運動学,軌道計画などロボット工学の知識が必要(ニワカに は難しい...) • とりあえず俺は三角関数で行く!
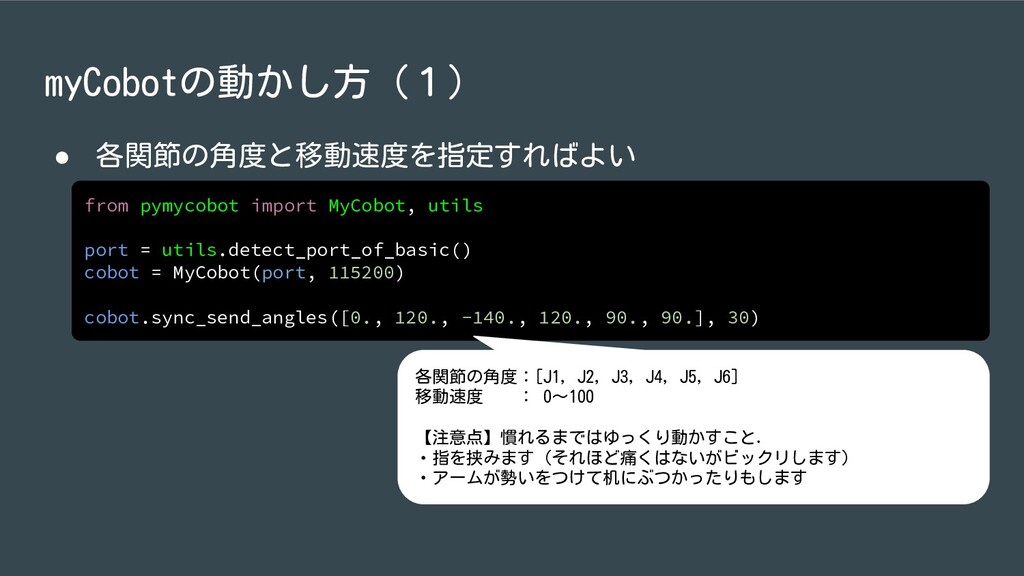
myCobotの動かし方(1) • 各関節の角度と移動速度を指定すればよい from pymycobot import MyCobot, utils port =
utils.detect_port_of_basic() cobot = MyCobot(port, 115200) cobot.sync_send_angles([0., 120., -140., 120., 90., 90.], 30) 各関節の角度:[J1, J2, J3, J4, J5, J6] 移動速度 : 0~100 【注意点】慣れるまではゆっくり動かすこと. ・指を挟みます(それほど痛くはないがビックリします) ・アームが勢いをつけて机にぶつかったりもします
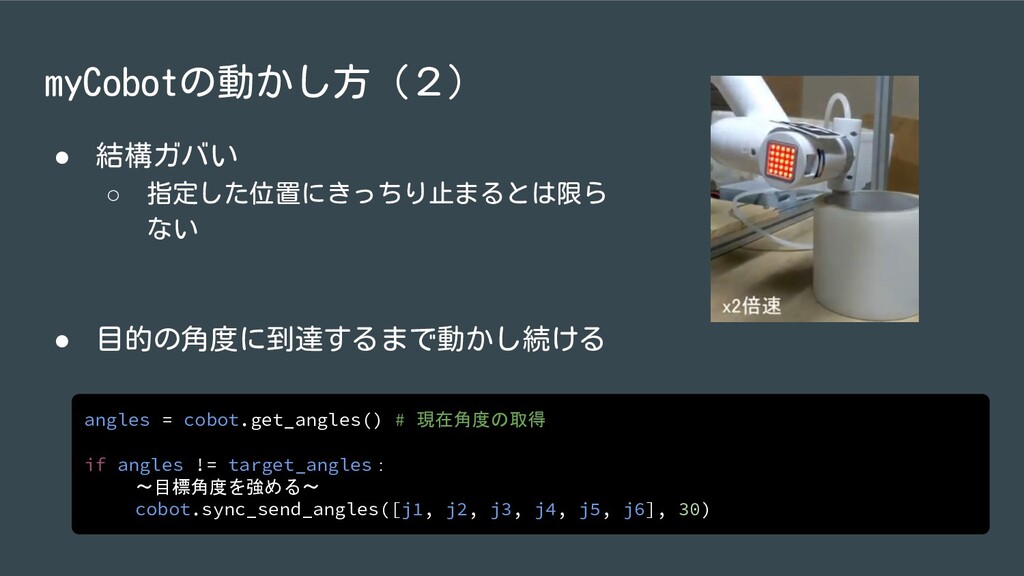
myCobotの動かし方(2) • 結構ガバい ◦ 指定した位置にきっちり止まるとは限ら ない • 目的の角度に到達するまで動かし続ける angles =
cobot.get_angles() # 現在角度の取得 if angles != target_angles: ~目標角度を強める~ cobot.sync_send_angles([j1, j2, j3, j4, j5, j6], 30)
実験
実験(失敗編)
まとめ • Pythonでロボットアームを動かすことができた ◦ ロボットの眼 ⇒ RealSense : pyrealsense2 ◦ ロボットアーム ⇒ myCobot
: pymycobot • 単純にロボットアームは超楽しい! ◦ キュウリを持ち上げた時には感動すら覚えた ◦ いろいろな作業をやらせてみたい
退屈なことはPythonにやらせよう https://automatetheboringstuff.com/ • やっかいなことに退屈な仕事はなくならない • 変えられないことを受け入れる冷静さと変え られることを変える勇気を(二ーバーの祈り より) 最近特に仕事を選ばなくなった Python君に助けてもらおう!
ご清聴ありがとうございました.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![野菜の位置の検出 • アーム直下の地面上24cmのライン上をサーチ • 3次元カメラ座標系⇒2次元Depth画像座標系⇒3次元カメラ座標系 (将来的には,深層学習を用いて掴みやすい位置の検出までやりたい...) 野菜検出ライン[pix]](https://files.speakerdeck.com/presentations/5f0fb742795f461e8c915950de9e759a/slide_18.jpg){kind=link}
![RealSenseで投影・逆投影 # 3次元カメラ座標系->2次元depth画像座標系 p0 = rs.rs2_project_point_to_pixel(depth_intrinsics, points[0]) # ライン右端 p1](https://files.speakerdeck.com/presentations/5f0fb742795f461e8c915950de9e759a/slide_19.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}