本資料はSatAI.challengeのサーベイメンバーと共に作成したものです。
SatAI.challengeは、リモートセンシング技術にAIを適用した論文の調査や、より俯瞰した技術トレンドの調査や国際学会のメタサーベイを行う研究グループです。speakerdeckではSatAI.challenge内での勉強会で使用した資料をWeb上で共有しています。
https://x.com/sataichallenge
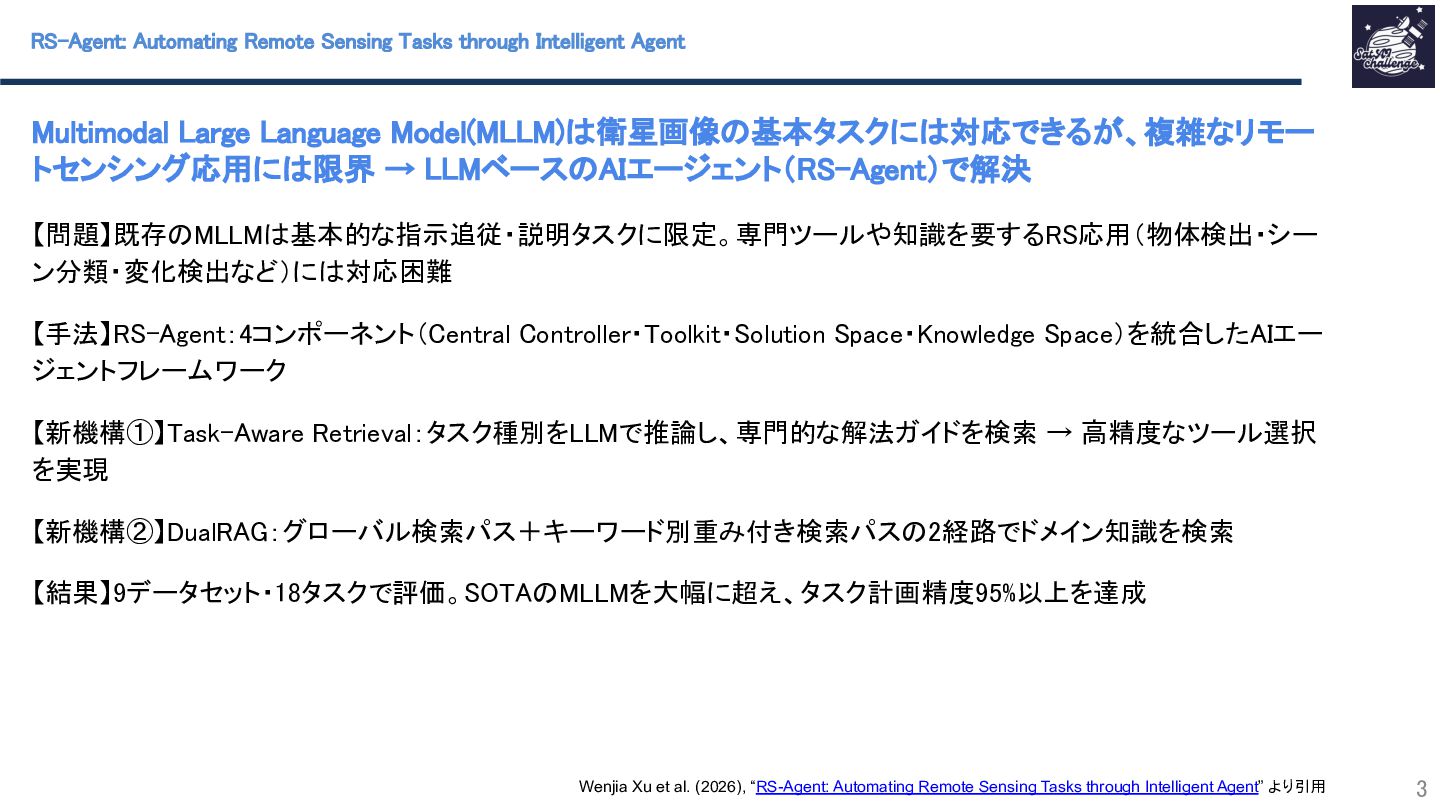
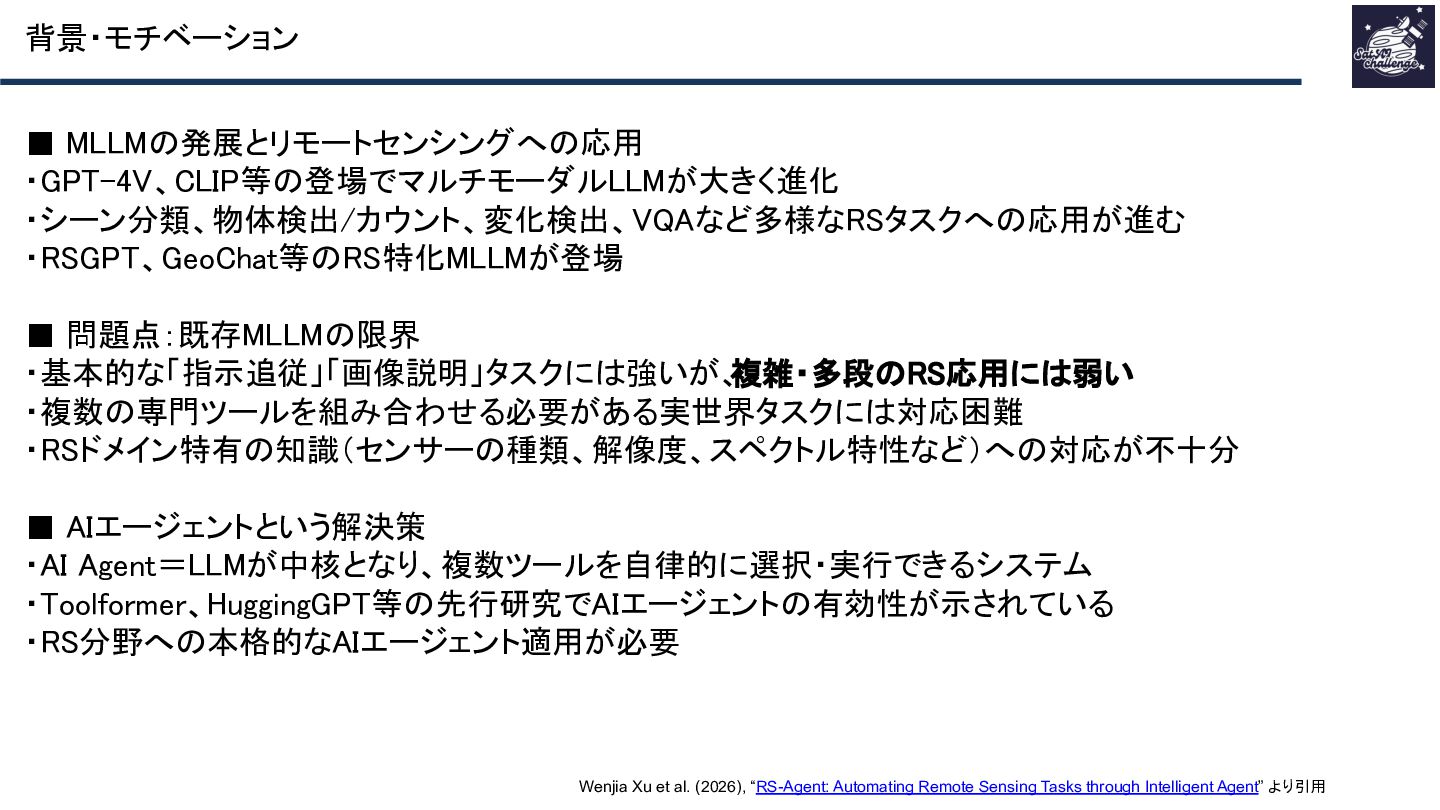
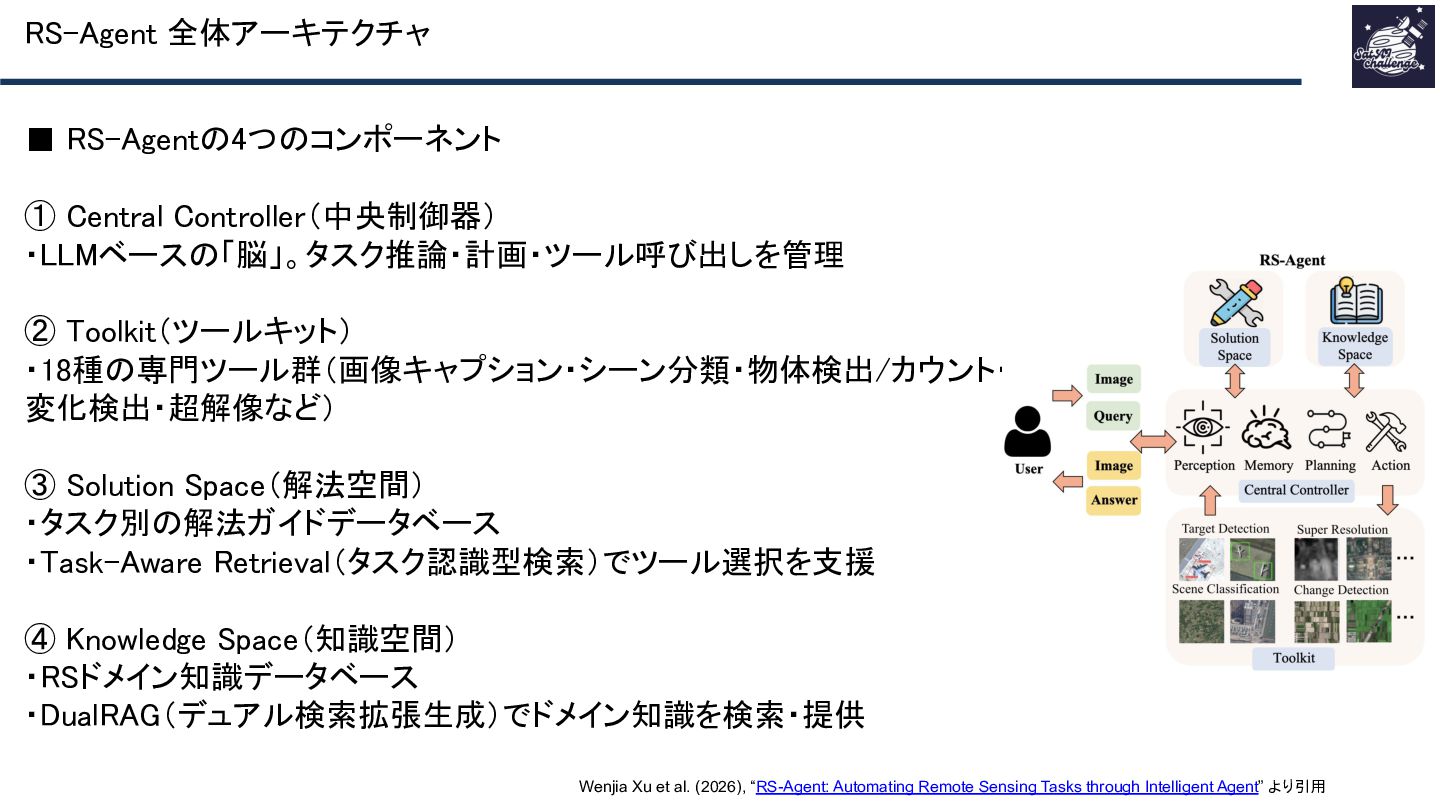
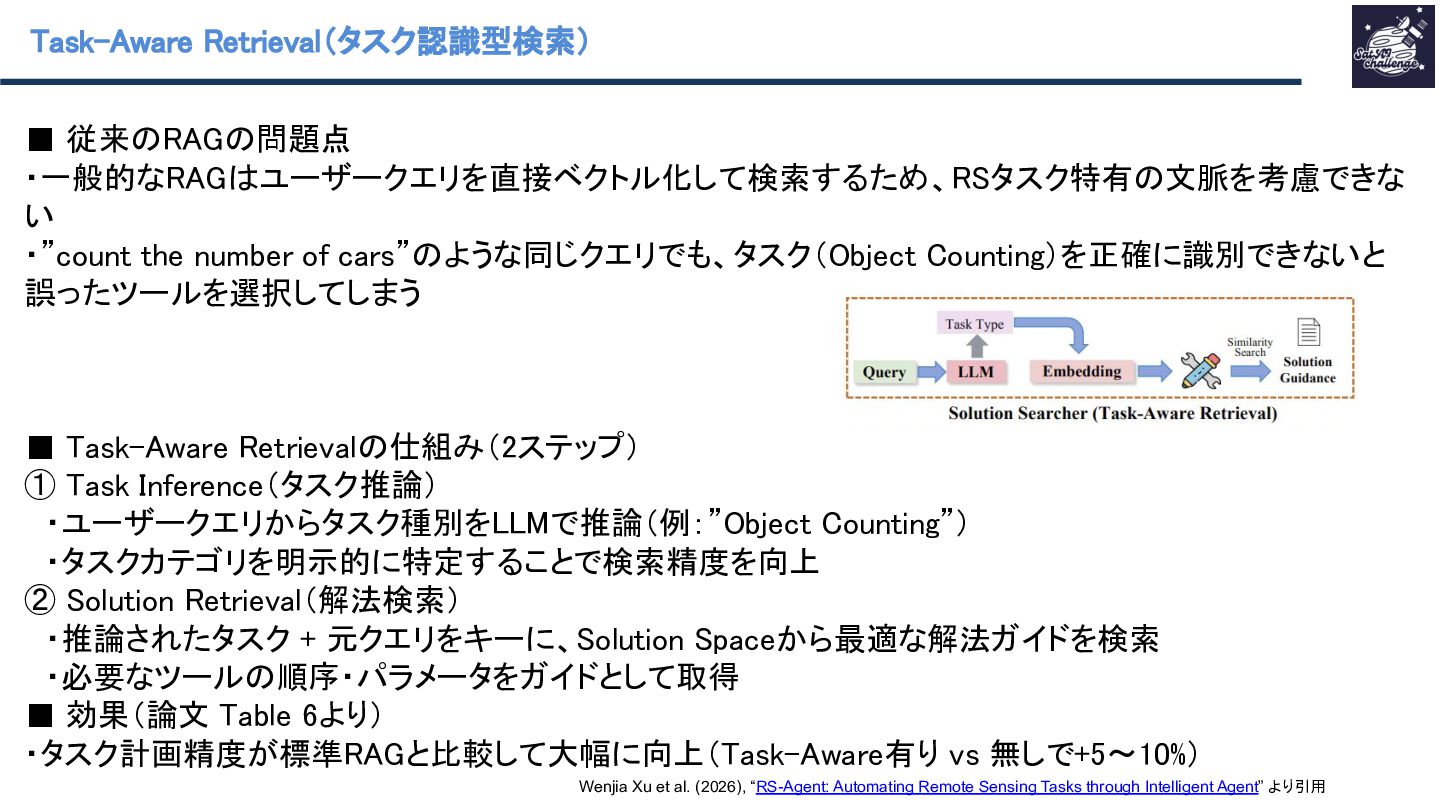
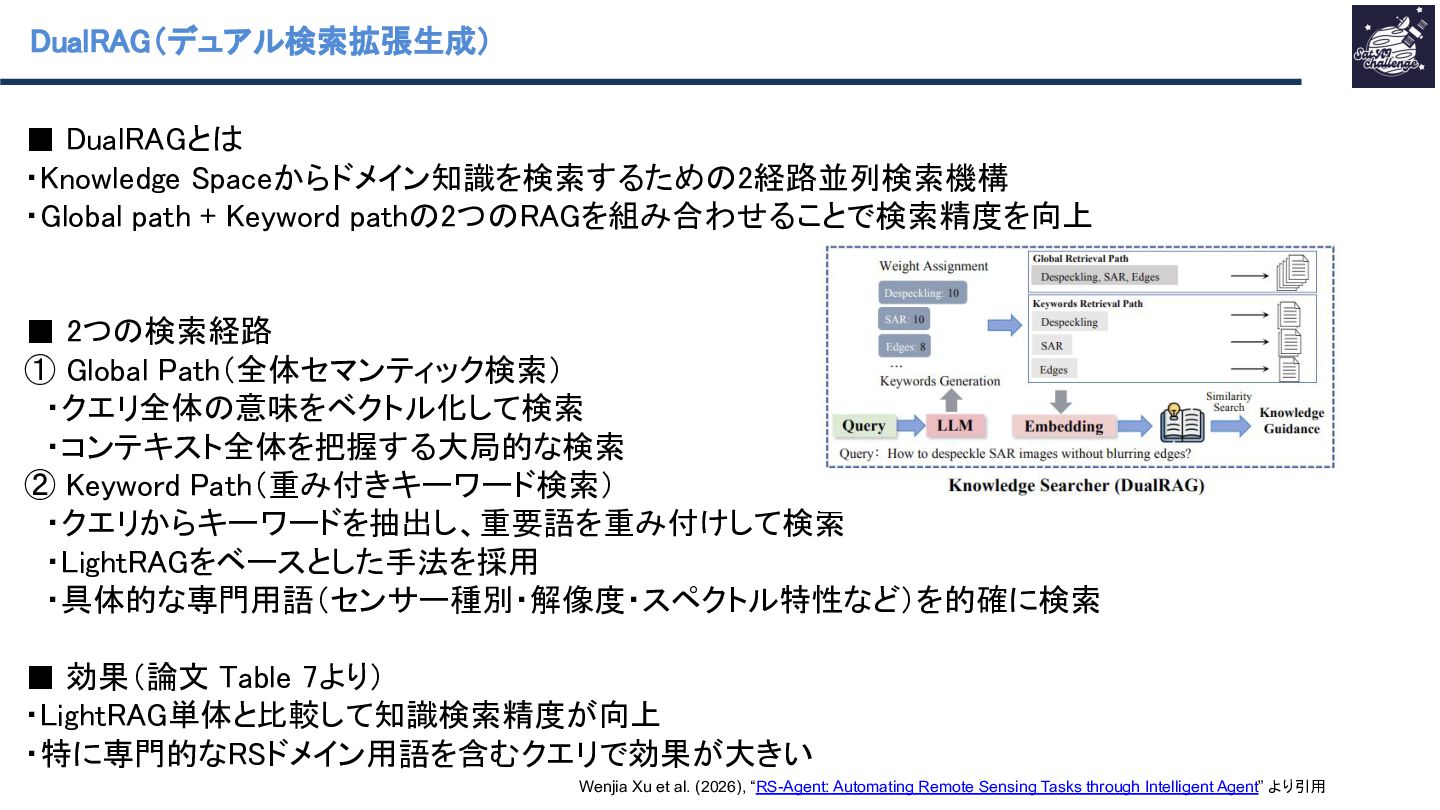
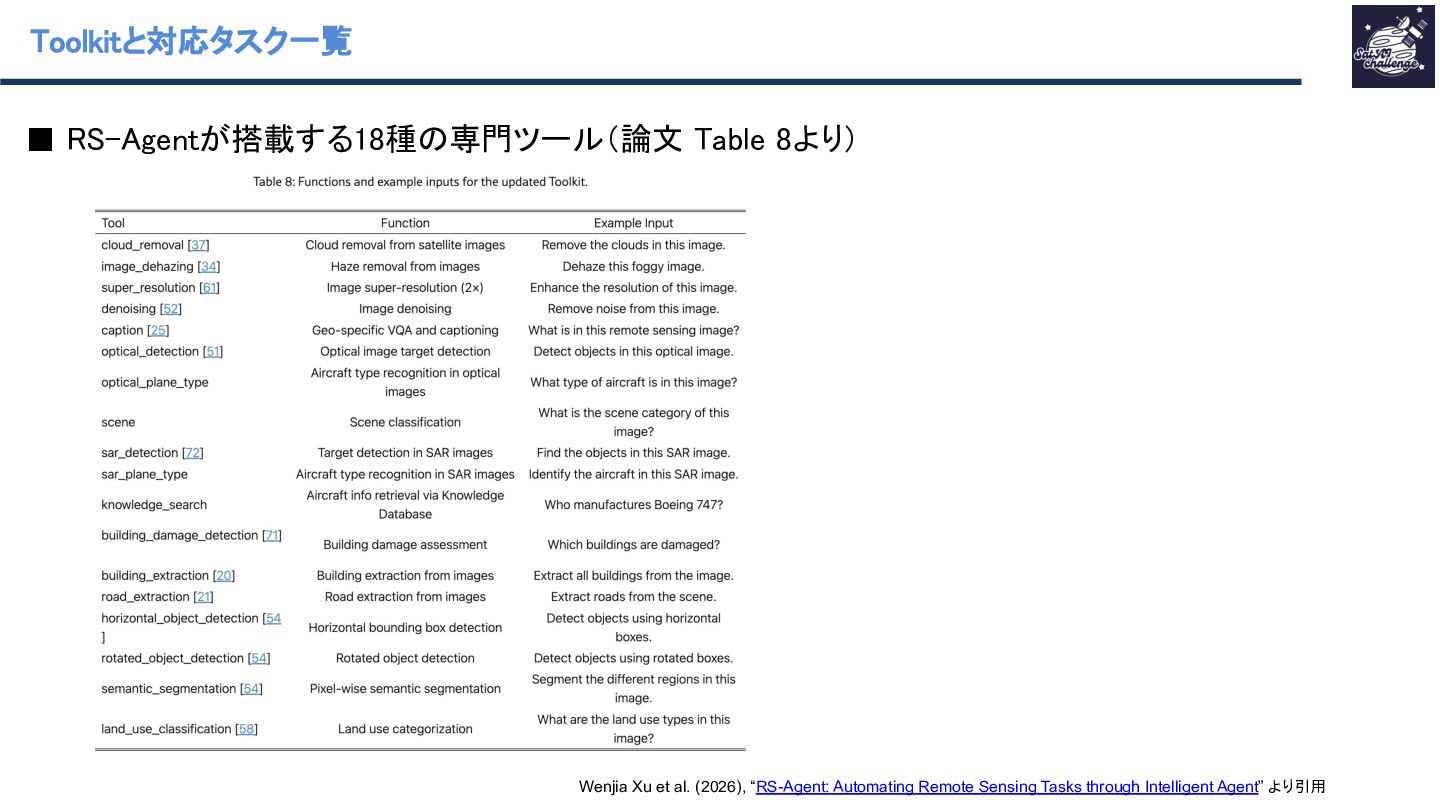
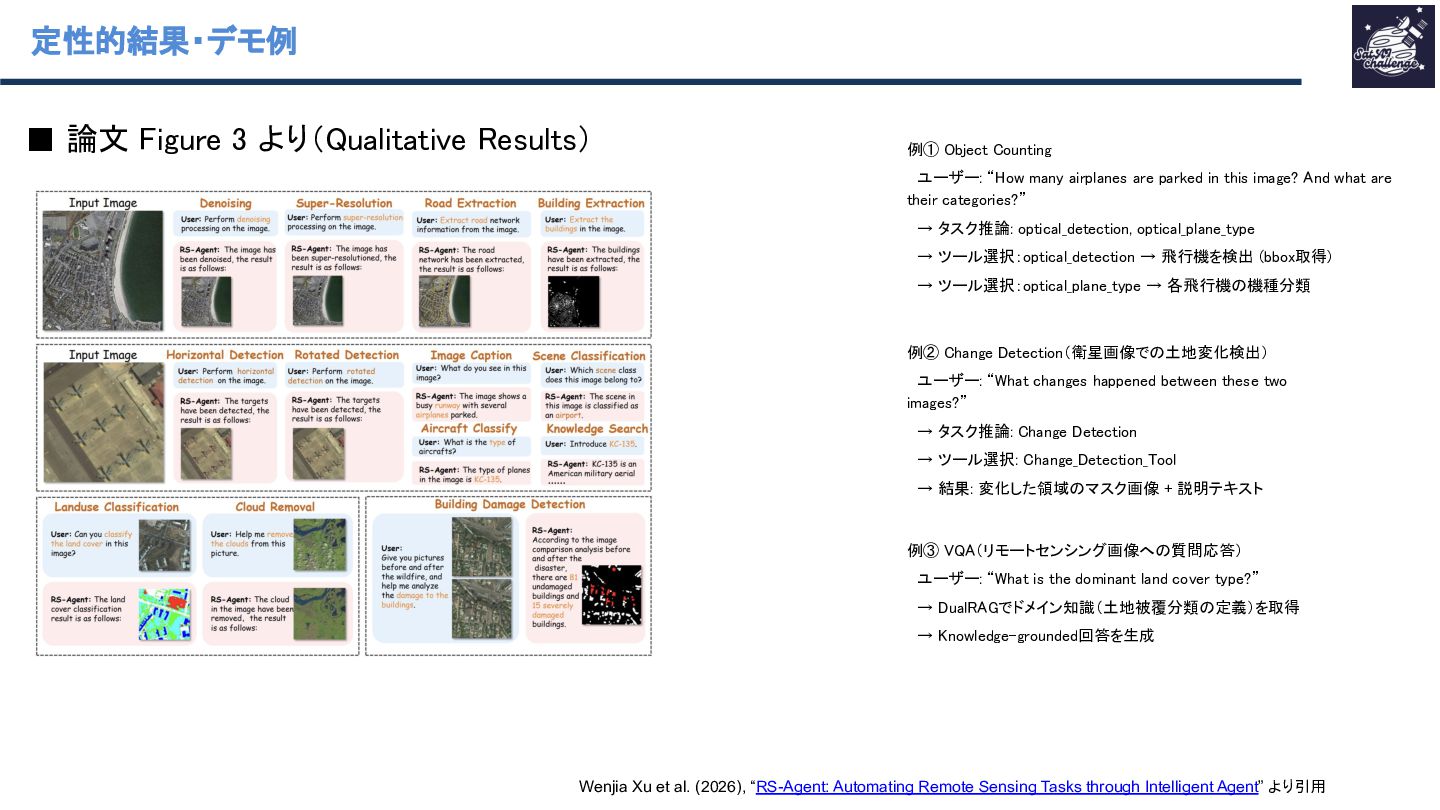
本研究では、リモートセンシング分野向けAIエージェント「RS-Agent」を提案し、複数の専門ツールとドメイン知識を統合することで、複雑な衛星画像解析タスクを自律的に実行可能としています。Task-Aware Retrievalによりタスク推論に基づく適切なツール選択を実現し、DualRAGによってリモートセンシング特有の専門知識を高精度に検索・活用しています。実験では、9データセット・18タスクにおいて既存のMLLMベース手法を上回る性能を達成し、95%以上の高いタスク計画精度を示されました。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}