emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Manœuvre planaire d’un vaisseau spatial - Ph´ enom` ene de chattering et solution sous-optimale Jiamin ZHU Laboratoire Jacques-Louis Lions Collaboration: E. TR´ ELAT, M. CERF [email protected] 3/12/2015
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Table of content 1 Formulation du probl` eme MTTP 2 Analysis des ext´ emales 3 Solution sous-optimale 4 Conclusions
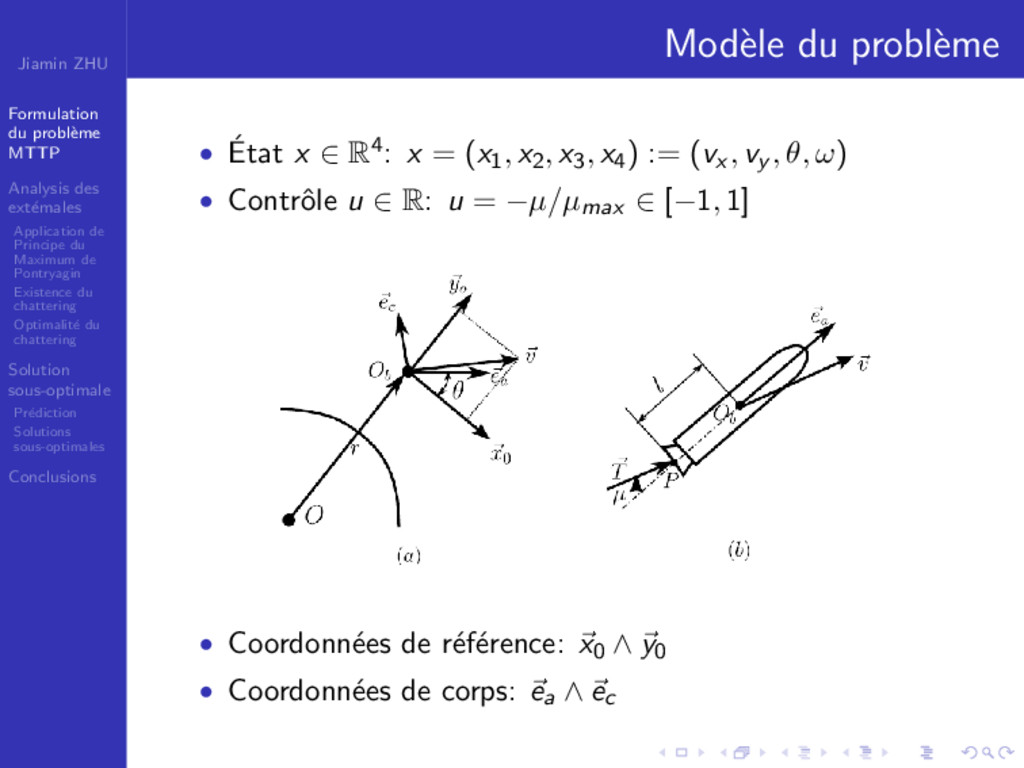
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Mod` ele du probl` eme • ´ Etat x ∈ R4: x = (x1, x2, x3, x4) := (vx , vy , θ, ω) • Contrˆ ole u ∈ R: u = −µ/µmax ∈ [−1, 1] • Coordonn´ ees de r´ ef´ erence: x0 ∧ y0 • Coordonn´ ees de corps: ea ∧ ec
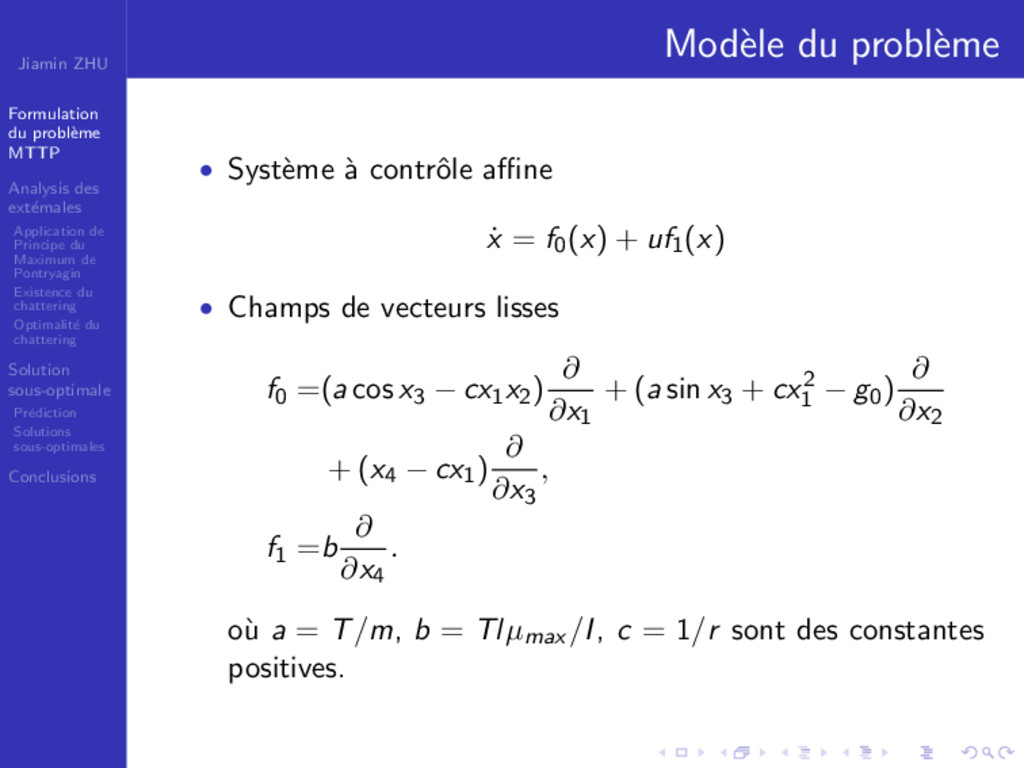
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Mod` ele du probl` eme • Syst` eme ` a contrˆ ole affine ˙ x = f0(x) + uf1(x) • Champs de vecteurs lisses f0 =(a cos x3 − cx1x2) ∂ ∂x1 + (a sin x3 + cx2 1 − g0) ∂ ∂x2 + (x4 − cx1) ∂ ∂x3 , f1 =b ∂ ∂x4 . o` u a = T/m, b = Tlµmax /I, c = 1/r sont des constantes positives.
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Formulation du probl` eme MTTP Amener le syst` eme ˙ x = f0(x) + uf1(x) de x(0) = x0 (condition initiale) ` a x(tf ) ∈ M1 (condition finale) en temps minimal tf sous la contrainte de contrˆ ole u(t) ∈ [−1, 1], o` u M1 ={(x1, x2, x3, x4) ∈ R4| x2(tf ) − x1(tf ) tan x3f = 0, x3f = x3(tf ), x4f = x4(tf )}
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Table of content 1 Formulation du probl` eme MTTP 2 Analysis des ext´ emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering 3 Solution sous-optimale 4 Conclusions
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Application de Principe du Maximum de Pontryagin • Vecteur adjoint p = (p1, p2, p3, p4), r´ eel p0 ≤ 0 • ´ Equation des extr´ emales ˙ x = ∂H ∂p , ˙ p = − ∂H ∂x ⇒ (x(·), p(·), p0, u(·)) une extr´ emale • Hamiltonien: H := H0 + uH1 = p, f0(x) + u p, f1(x) • Condition de maximisation: H(x(t), p(t), p0, u(t)) = max −1≤v(t)≤1 H(x(t), p(t), p0, v(t)) • Condition de transversalit´ e (p1(tf ), p2(tf )) ⊥ ea(tf ) ⇒ p1(tf ) = −p2(tf ) tan x3f
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Extr´ emales r´ eguli` ere et singuli` ere • Hamiltonien: H := H0 + uH1 = p, f0(x) + u p, f1(x) • Fonction de commutation (switching function): H1(t) = p(t), f1(x(t)) • Condition de maximisation: H(x(t), p(t), p0, u(t)) = max −1≤v(t)≤1 H(x(t), p(t), p0, v(t)) • Contrˆ ole r´ egulier (Bang-Bang): u(t) = signH1(t), H1(t) = 0
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Extr´ emales r´ eguli` ere et singuli` ere • Fonction de commutation(switching function): H1(t) = p(t), f1(x(t)) • Contrˆ ole singulier: H1(t) ≡ 0, t ∈ I ⊂ [0, tf ] • Ordre du contrˆ ole singulier: un contrˆ ole singulier d’ordre k apparaˆ ıt lin´ eairement dans la d´ eriv´ ee d’ordre 2k de la fonction H1 • Condition g´ en´ eralis´ ee de Legendre-Clebsch (condition n´ ecessaire d’optimalit´ e d’ordre k): (−1)k ∂ ∂u d2kH1 dt2k ≤ 0, • Contrˆ ole singulier d’ordre un nombre pair ⇒ Chattering (H.J. Kelley, R.E. Kopp, H.G. Moyer, ect.)
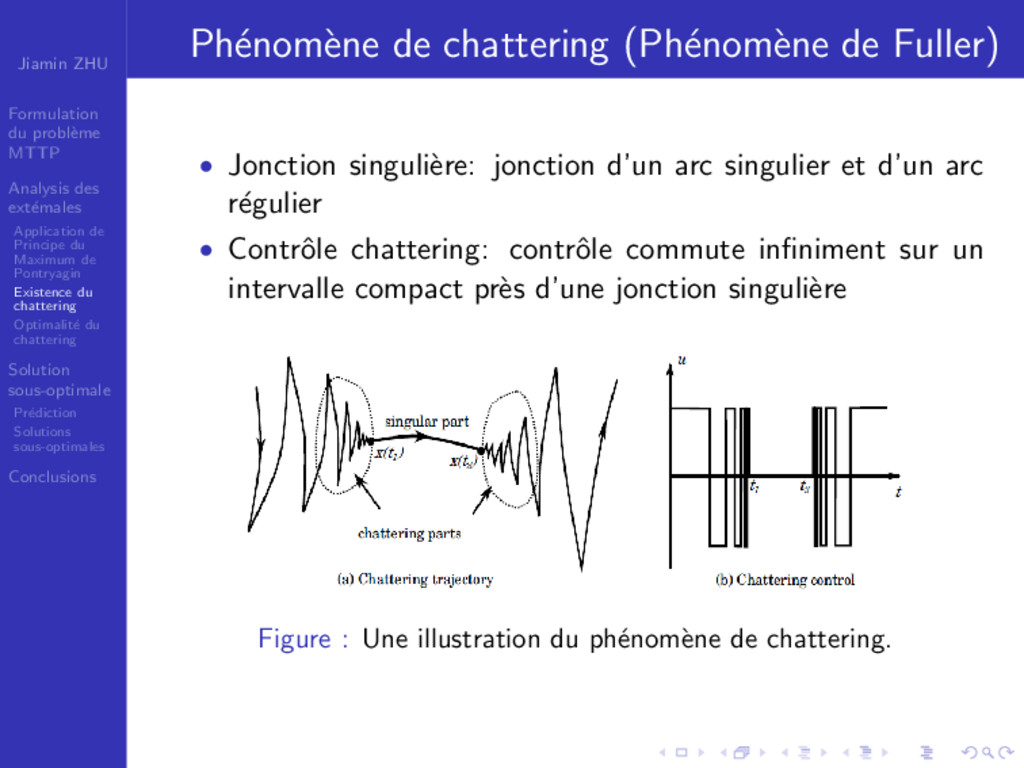
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Ph´ enom` ene de chattering (Ph´ enom` ene de Fuller) • Jonction singuli` ere: jonction d’un arc singulier et d’un arc r´ egulier • Contrˆ ole chattering: contrˆ ole commute infiniment sur un intervalle compact pr` es d’une jonction singuli` ere Figure : Une illustration du ph´ enom` ene de chattering.
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Jonction singuli` ere et chattering • Corollaire (jonction): For the problem (MTTP), any optimal singular arc can- not be connected with a nontrivial bang arc. We must then have chattering, in the following sense. Let u be an optimal control, solution of (MTTP), and assume that u is singular on the sub-interval (t1, t2) ⊂ [0, tf ] and is non-singular else- where. If t1 > 0 (resp., if t2 < tf ) then, for every > 0, the control u switchings an infinite number of times over the time interval [t1 − , t1] (resp., on [t2, t2 + ]). • Preuve par l’absurde
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Portrait des solutions proches de la surface singuli` ere • Surface singuli` ere S := {(x, p)|H1 ≡ 0} • Corollaire (portrait des solutions) For the problem (MTTP), there exist two subbundles Σ+ and Σ− having the singular surface S as a base, and two fibers N+ and N− of dimension two filled by chattering solutions. • Preuve: “Theorem on Bundles with Chattering Fibers” (M.I.Zelikin, V.F. Borisov)
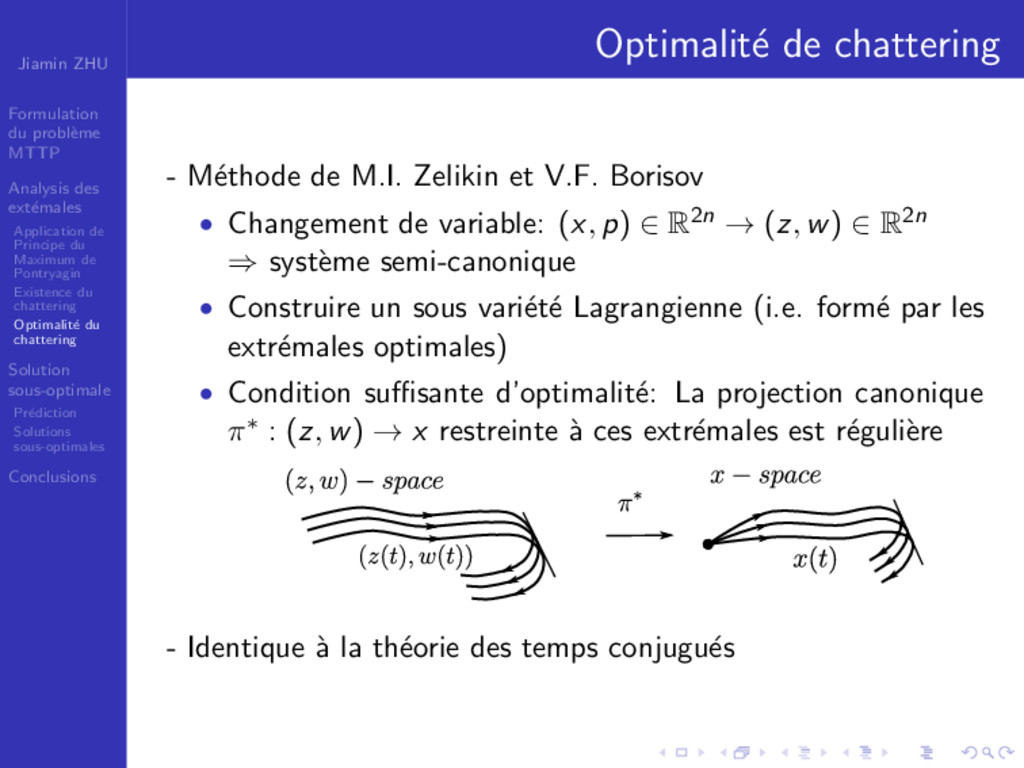
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Optimalit´ e de chattering - M´ ethode de M.I. Zelikin et V.F. Borisov • Changement de variable: (x, p) ∈ R2n → (z, w) ∈ R2n ⇒ syst` eme semi-canonique • Construire un sous vari´ et´ e Lagrangienne (i.e. form´ e par les extr´ emales optimales) • Condition suffisante d’optimalit´ e: La projection canonique π∗ : (z, w) → x restreinte ` a ces extr´ emales est r´ eguli` ere - Identique ` a la th´ eorie des temps conjugu´ es
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Optimalit´ e de Chattering - Syst` eme semi-canonique • Supposer que le contˆ ole singulier est d’ordre 2 • z ∈ R4: zi = H(i−1) 1 + o(H(i−1) 1 ), i = 1, · · · , 4 t.q. ˙ zi = zi+1+fi (z, w), i = 1, 2, 3, ˙ z4 = α(w)+uβ(w)+f4(z, w) o` u les fi sont infinit´ esimaux de zi+1, i = 1, 2, 3, 4 • Compl´ eter avec w ∈ R2n−4: ˙ w = F(z, w, u) • (z, w) = (z(x, p), w(x, p)) ∈ R2n t.q. det( D(z, w) D(x, p) ) = 0 • Surface singuli` ere S = {(x, p)|H1 ≡ 0} ⇒ S = {(z, w)|z = 0}
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Optimalit´ e de chattering - Sous vari´ et´ e Lagrangien • Surface singuli` ere: S = {(z, w)|z = 0} • S0 := S ∩ {H = 0} • Projection canonique: π∗ : (z, w) → x • M∗ 1 := {x|x2 = Ψ1(x1)} ∩ π∗(S0) • Sous vari´ et´ ed N: associer un point x ∈ M∗ 1 ` a un point (x, p(x)) ∈ S0 et satisfaire la condition de transversali´ e (dimension 1) ⇒ N est en co-dimension 6 + 1 et est un lift de M∗ 1 . • Ψ1(·) peut ˆ etre choisie t.q. N est transversal aux extr´ emales singuli` eres dans S.
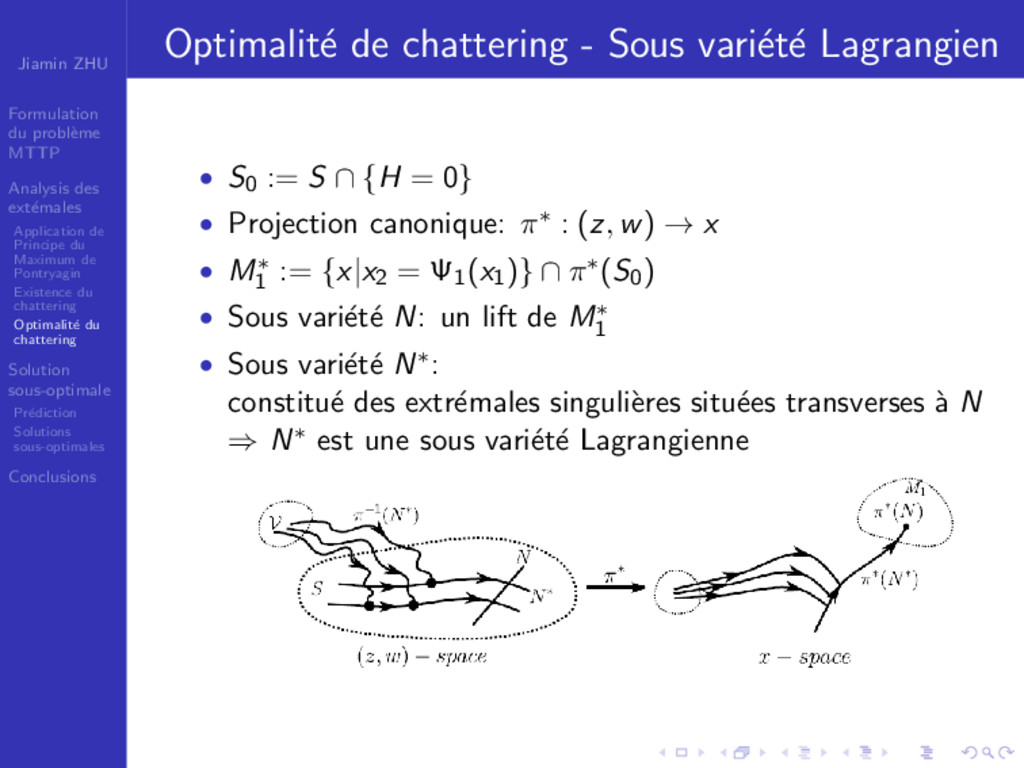
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Optimalit´ e de chattering - Sous vari´ et´ e Lagrangien • S0 := S ∩ {H = 0} • Projection canonique: π∗ : (z, w) → x • M∗ 1 := {x|x2 = Ψ1(x1)} ∩ π∗(S0) • Sous vari´ et´ e N: un lift de M∗ 1 • Sous vari´ et´ e N∗: constitu´ e des extr´ emales singuli` eres situ´ ees transverses ` a N ⇒ N∗ est une sous vari´ et´ e Lagrangienne
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Optimalit´ e de chattering - Condition suffisante • Surface de commutation Γ = {(z, w)|z1 = 0} • Notons V = (v1, v2, v3, vk) • v1 vecteur tangent ` a N • v2 vitesse des extr´ emales singuli` eres en un point dans S • v3 vitesse des extr´ emales r´ eguli` eres en un point dans S • vk d´ eriv´ ee de la projection π∗ du vecteur ∂/∂z3 : dπ∗(∂/∂z3 ) • Th´ eor` eme (optimalit´ e local du chattering) Les solutions chattering du MTTP sont optimales locale- ment pour la C0-topologie si det V = 0 • Preuve: les conditions suffisantes pour la r´ egularit´ e de π∗ propos´ ees par M.I. Zelikin et V.F. Borisov
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Table of content 1 Formulation du probl` eme MTTP 2 Analysis des ext´ emales 3 Solution sous-optimale Pr´ ediction Solutions sous-optimales 4 Conclusions
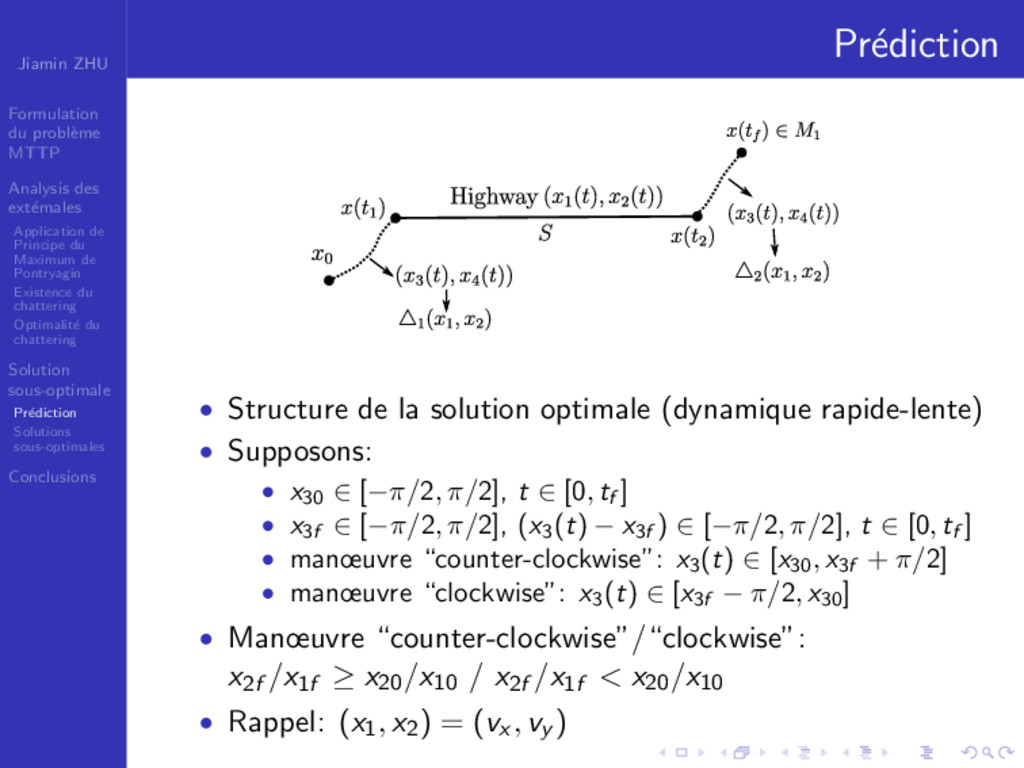
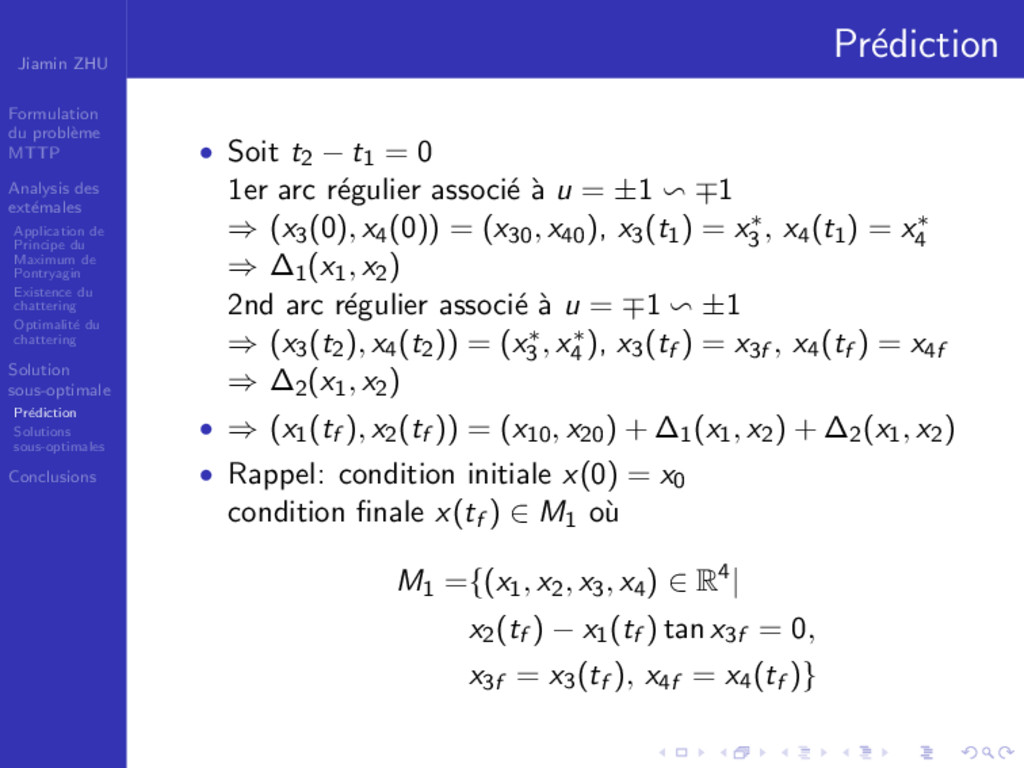
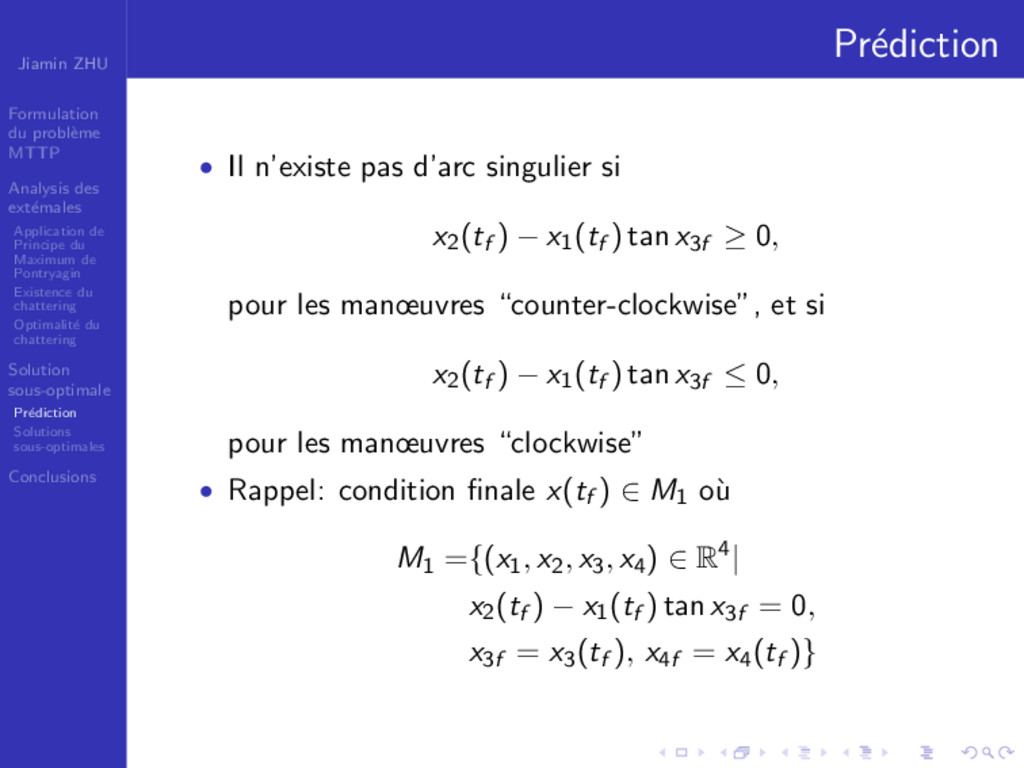
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Pr´ ediction • Il n’existe pas d’arc singulier si x2(tf ) − x1(tf ) tan x3f ≥ 0, pour les manœuvres “counter-clockwise”, et si x2(tf ) − x1(tf ) tan x3f ≤ 0, pour les manœuvres “clockwise” • Rappel: condition finale x(tf ) ∈ M1 o` u M1 ={(x1, x2, x3, x4) ∈ R4| x2(tf ) − x1(tf ) tan x3f = 0, x3f = x3(tf ), x4f = x4(tf )}
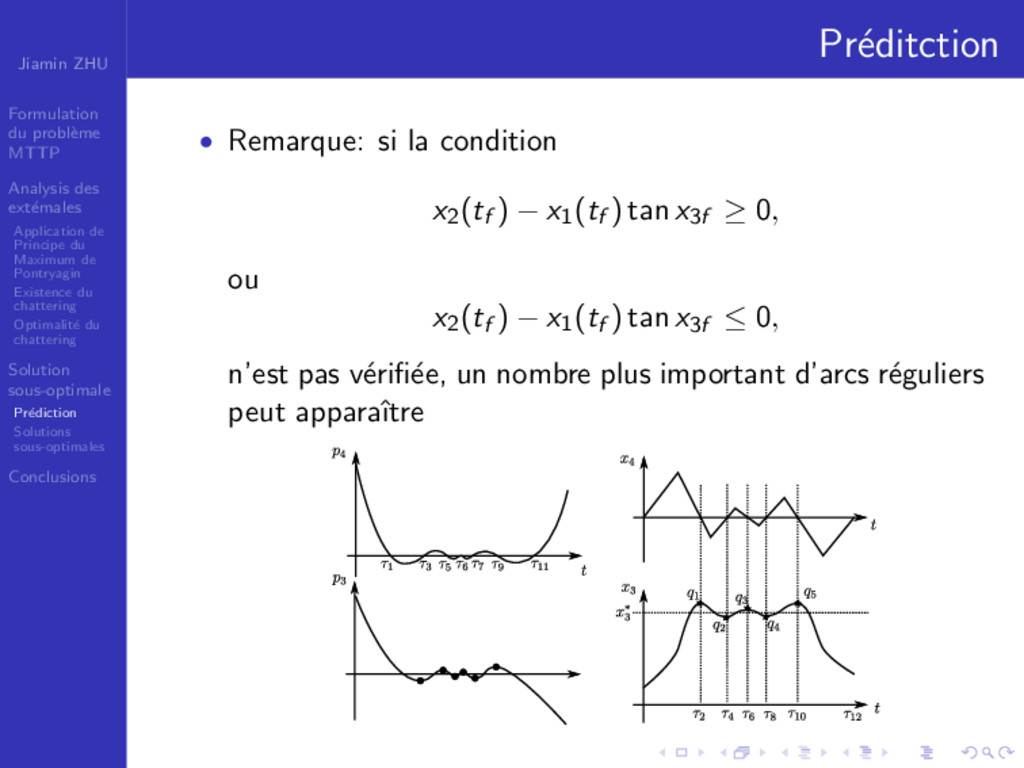
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Pr´ editction • Remarque: si la condition x2(tf ) − x1(tf ) tan x3f ≥ 0, ou x2(tf ) − x1(tf ) tan x3f ≤ 0, n’est pas v´ erifi´ ee, un nombre plus important d’arcs r´ eguliers peut apparaˆ ıtre
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Solutions sous-optimales (SODM) • Deux m´ ethodes num´ eriques principales • M´ ethodes indirectes: PMP ⇒ probl` eme de tir le contrˆ ole chattering n’est plus continu par morceaux ⇒ ´ echec de l’int´ egration num´ erique ⇒ ne sont pas appropri´ ees • M´ ethodes directes: Discr´ etisation ⇒ programmation non-lin´ eaire • Solution sous-optimale (SODM): m´ ethode directe + ap- proximation par contrˆ ole continu par morceaux • Outils: IPOPT + AMPL
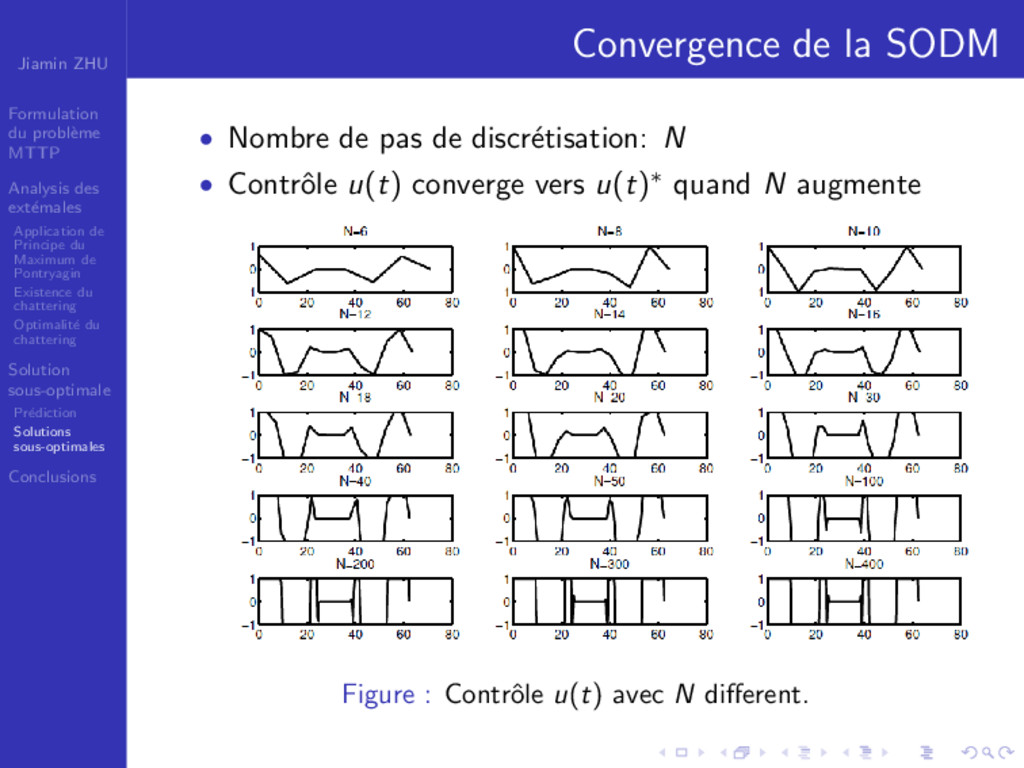
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Convergence de la SODM • Nombre de pas de discr´ etisation: N • Contrˆ ole u(t) converge vers u(t)∗ quand N augmente Figure : Contrˆ ole u(t) avec N different.
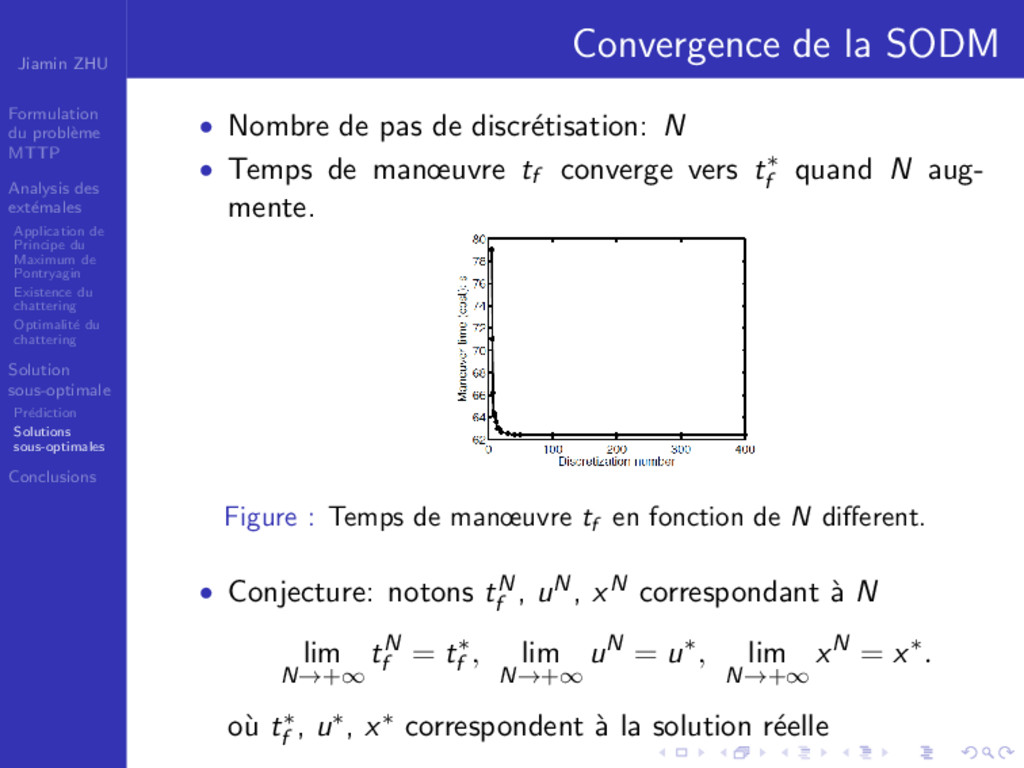
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Convergence de la SODM • Nombre de pas de discr´ etisation: N • Temps de manœuvre tf converge vers t∗ f quand N aug- mente. Figure : Temps de manœuvre tf en fonction de N different. • Conjecture: notons tN f , uN, xN correspondant ` a N lim N→+∞ tN f = t∗ f , lim N→+∞ uN = u∗, lim N→+∞ xN = x∗. o` u t∗ f , u∗, x∗ correspondent ` a la solution r´ eelle
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Solutions sous-optimales (SOFSN) • Solution sous-optimale avec un nombre de commutation fix´ e (SOFSN) • Fixer le nombre de commutation: (K − 1) < +∞ ⇒ trajectoire est divis´ ee par K intervalles • Variables: contrˆ ole (constant) sur chaque intervalle + dur´ ee de temps entre deux temps de commutation adja- cent • Trois parties: arc r´ egulier + arc singulier + arc r´ egulier • Outils: IPOPT + AMPL
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Exemple num´ erique - SOFSN • Soit K = 5 u = (1, −1, 0.0724, −1, 1), ζ = (9.6156, 10.4054, 23.3685, 9.9737, 9.0723)s, tf = 62.4355s • Soit K = 7 u =(1, −1, 1, −0.0055, 1, −1, 1), ζ =(9.6350, 11.7880, 2.2523, 16.1259, 2.2205, 11.3196, 9.0889)s, tf = 62.4302s • Comparaison de la SODM et la SOFSN: • SODM avec N = 200: t∗ f = 62.42s ⇒ un peu moins • SOFSN: t∗ f = 62.43s
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Table of content 1 Formulation du probl` eme MTTP 2 Analysis des ext´ emales 3 Solution sous-optimale 4 Conclusions
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions Conclusions • L’existence et l’optimalit´ e locale des extr´ emales de chatter- ing • Les conditions pour lesquelles il n‘y a pas d’arc singulier • Les solutions sous-optimales
emales Application de Principe du Maximum de Pontryagin Existence du chattering Optimalit´ e du chattering Solution sous-optimale Pr´ ediction Solutions sous-optimales Conclusions MERCI DE VOTRE ATTENTION
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}