Slides for a presentation given for a M.Sc. course on Reinforcement Learning, at the MVA Master (http://www.math.ens-cachan.fr/version-francaise/formations/master-mva/) at ENS Cachan in January 2016.
Joint work with Basile Clement, under the supervision of Christos Dimitrikakis, and Emilie Kaufmann.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
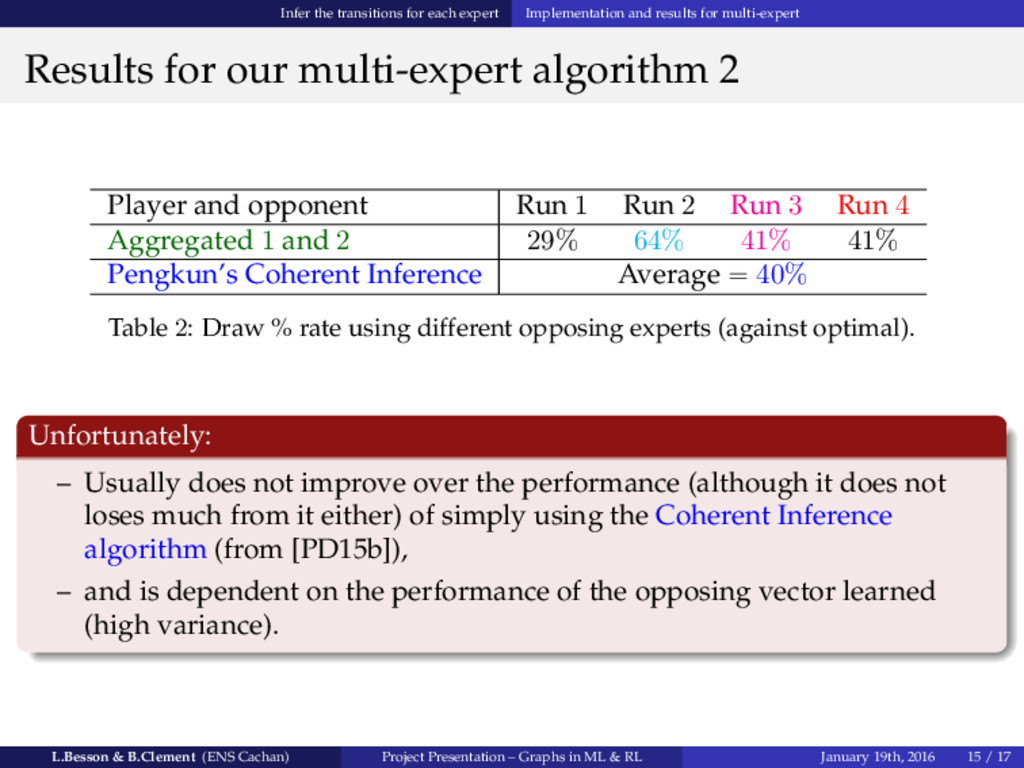
![Algo 2: multi-opponent algorithm combining [TD13] and [PD15b] Data: :](https://files.speakerdeck.com/presentations/2e5af19947504d76b3117398845f51b7/slide_33.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}