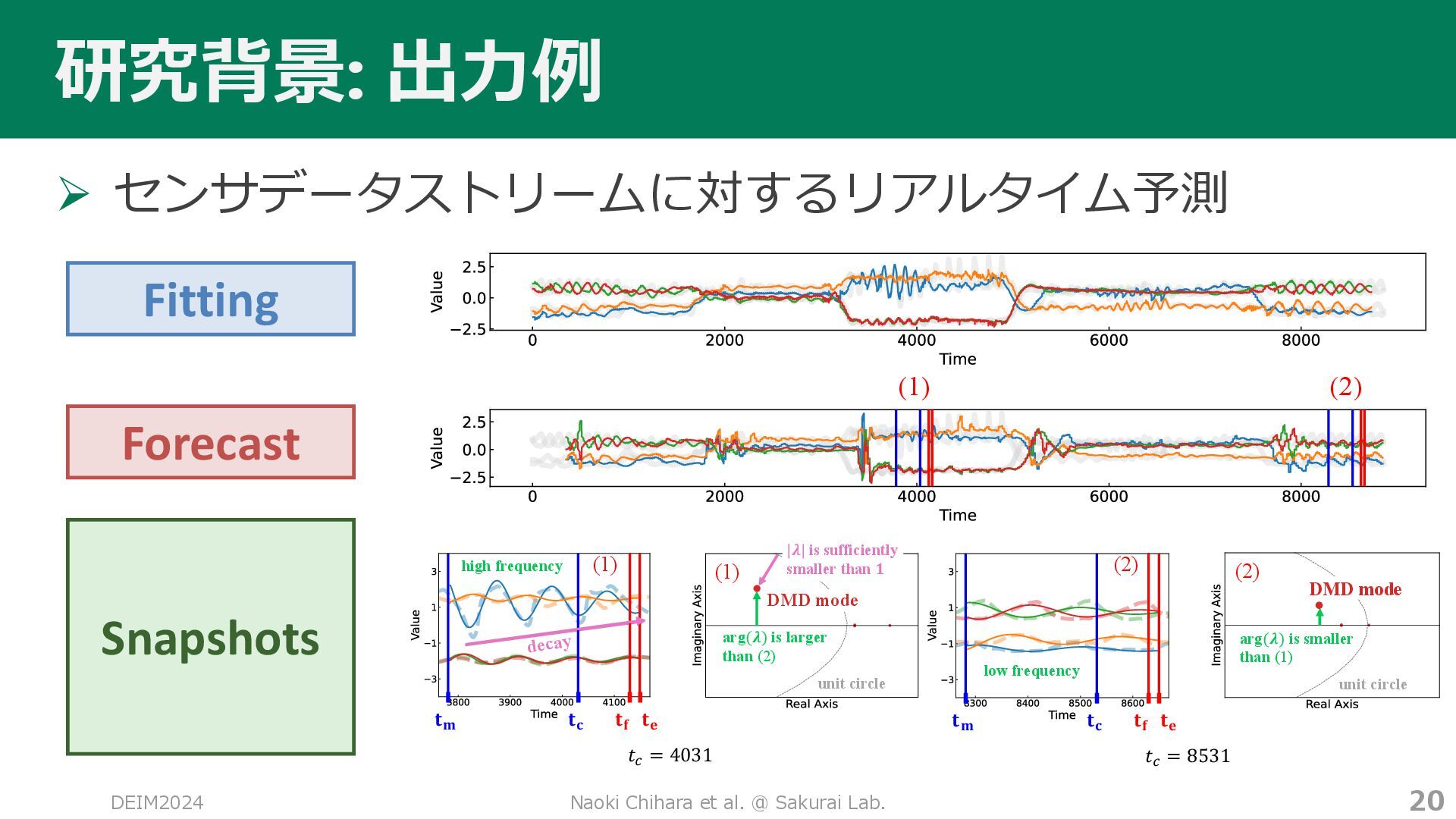
= 4031 high frequency DMD mode |"| is sufficiently smaller than $ arg(") is larger than (2) 研究背景: 出⼒例 Ø センサデータストリームに対するリアルタイム予測 Naoki Chihara et al. @ Sakurai Lab. 20 Fitting Forecast Snapshots (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=4881 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ DEIM2024 (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) (2) (2) ay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger tm=3781 tm=4881 (1) (2) (2) (2) ecay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm= (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=48 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗
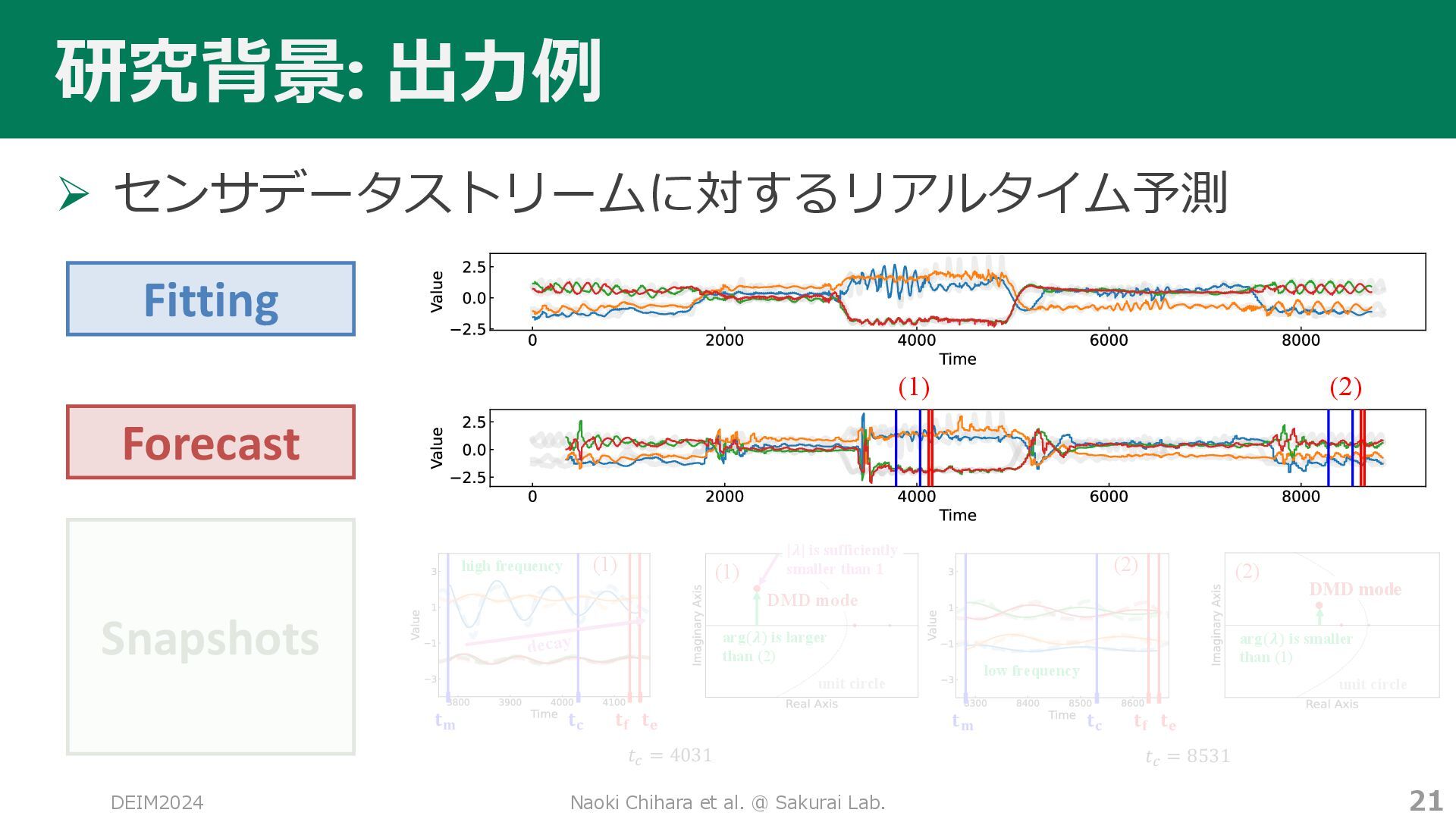
= 4031 high frequency DMD mode |"| is sufficiently smaller than $ arg(") is larger than (2) 研究背景: 出⼒例 Ø センサデータストリームに対するリアルタイム予測 Naoki Chihara et al. @ Sakurai Lab. 21 Fitting Forecast Snapshots DEIM2024 (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm= (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=48 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=4881 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) (2) (2) ay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger tm=3781 tm=4881 (1) (2) (2) (2) ecay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger
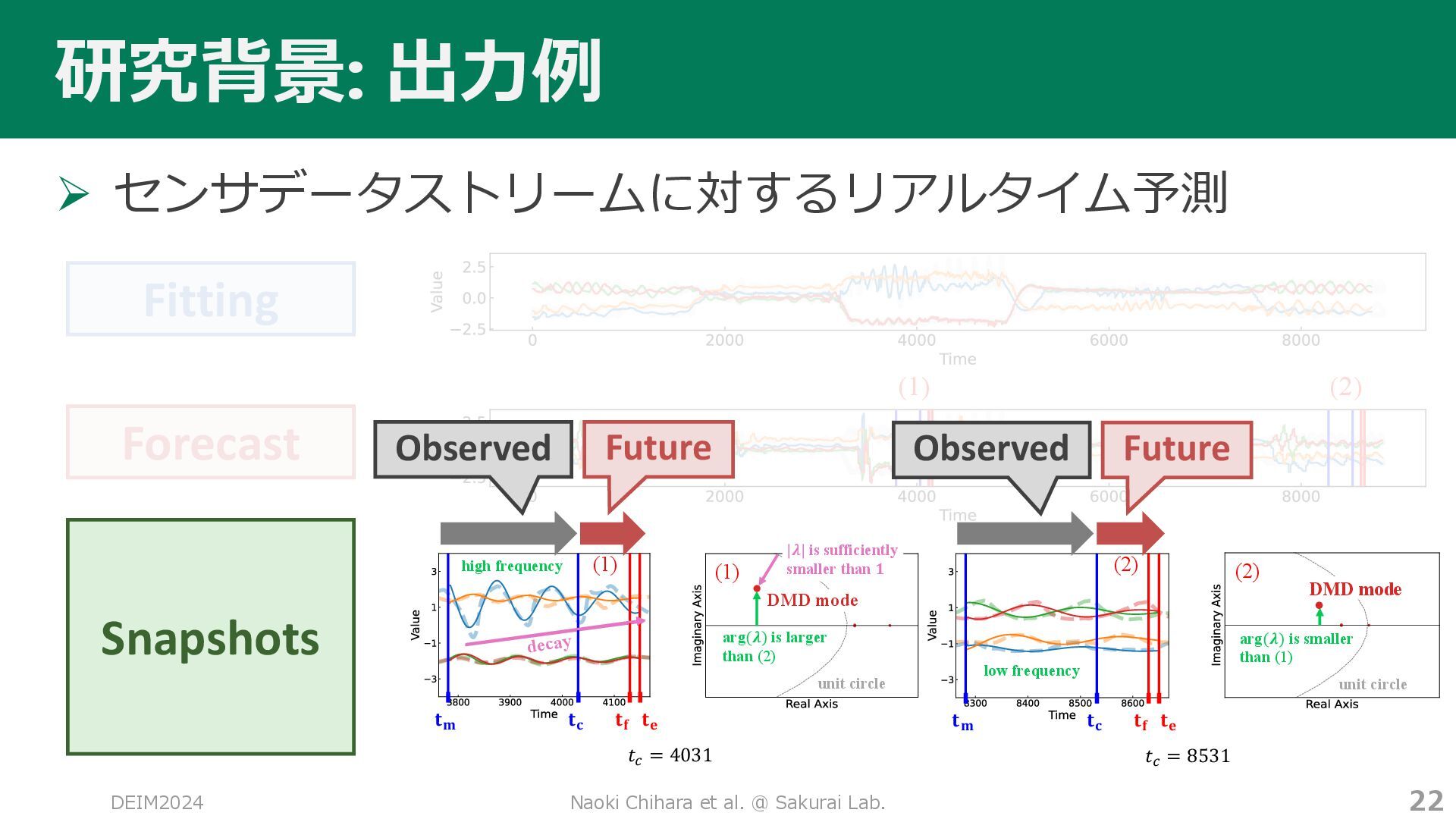
= 4031 high frequency DMD mode |"| is sufficiently smaller than $ arg(") is larger than (2) 研究背景: 出⼒例 Ø センサデータストリームに対するリアルタイム予測 Naoki Chihara et al. @ Sakurai Lab. 22 Fitting Forecast (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=4881 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ DEIM2024 (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) (2) (2) ay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger tm=3781 tm=4881 (1) (2) (2) (2) ecay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm= (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=48 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ Observed Future Observed Future Snapshots
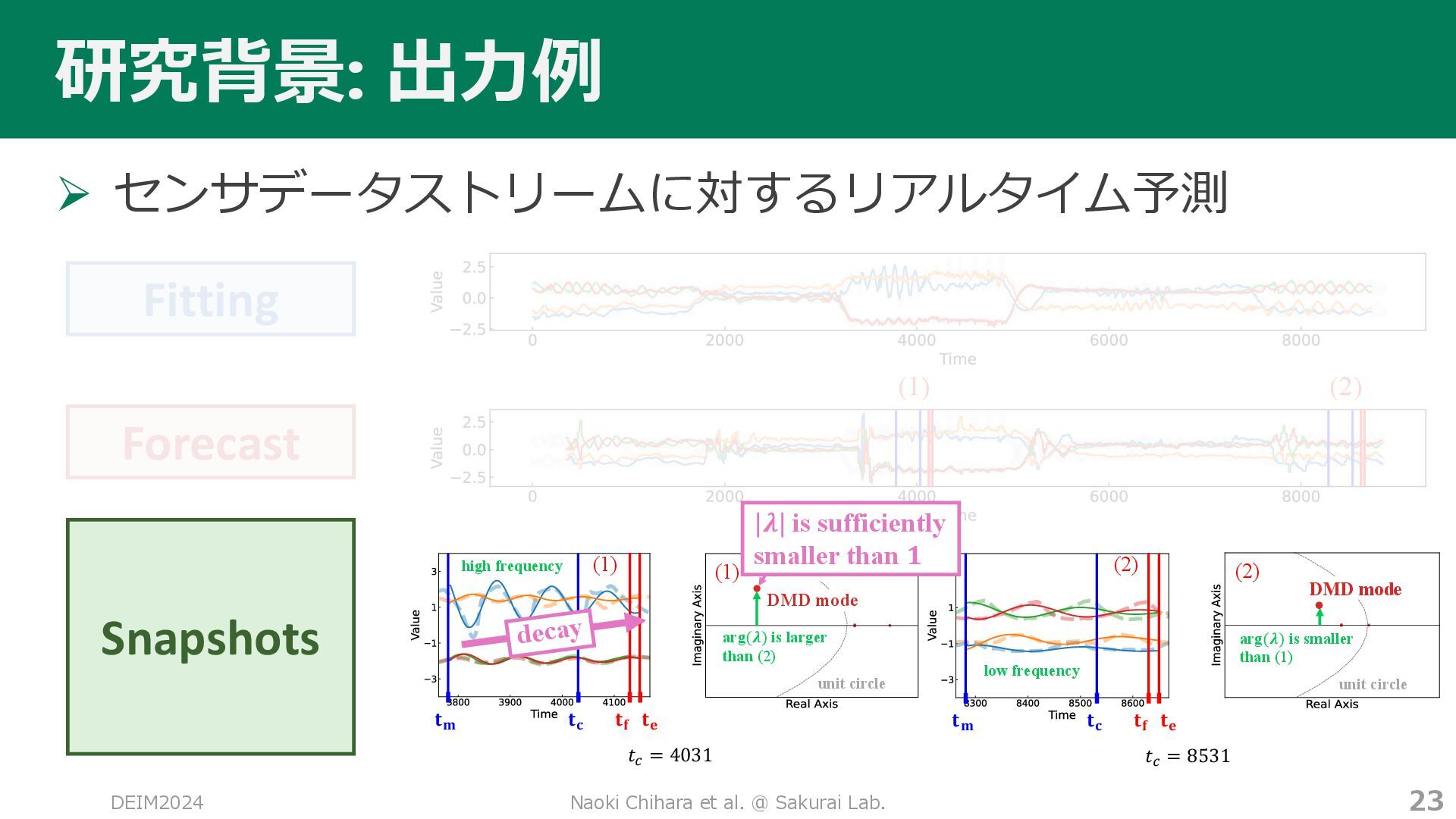
= 4031 high frequency DMD mode |"| is sufficiently smaller than $ arg(") is larger than (2) 研究背景: 出⼒例 Ø センサデータストリームに対するリアルタイム予測 Naoki Chihara et al. @ Sakurai Lab. 23 Fitting Forecast (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=4881 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ DEIM2024 (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) (2) (2) ay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger tm=3781 tm=4881 (1) (2) (2) (2) ecay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm= (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=48 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ decay |𝝀| is sufficiently smaller than 𝟏 Snapshots
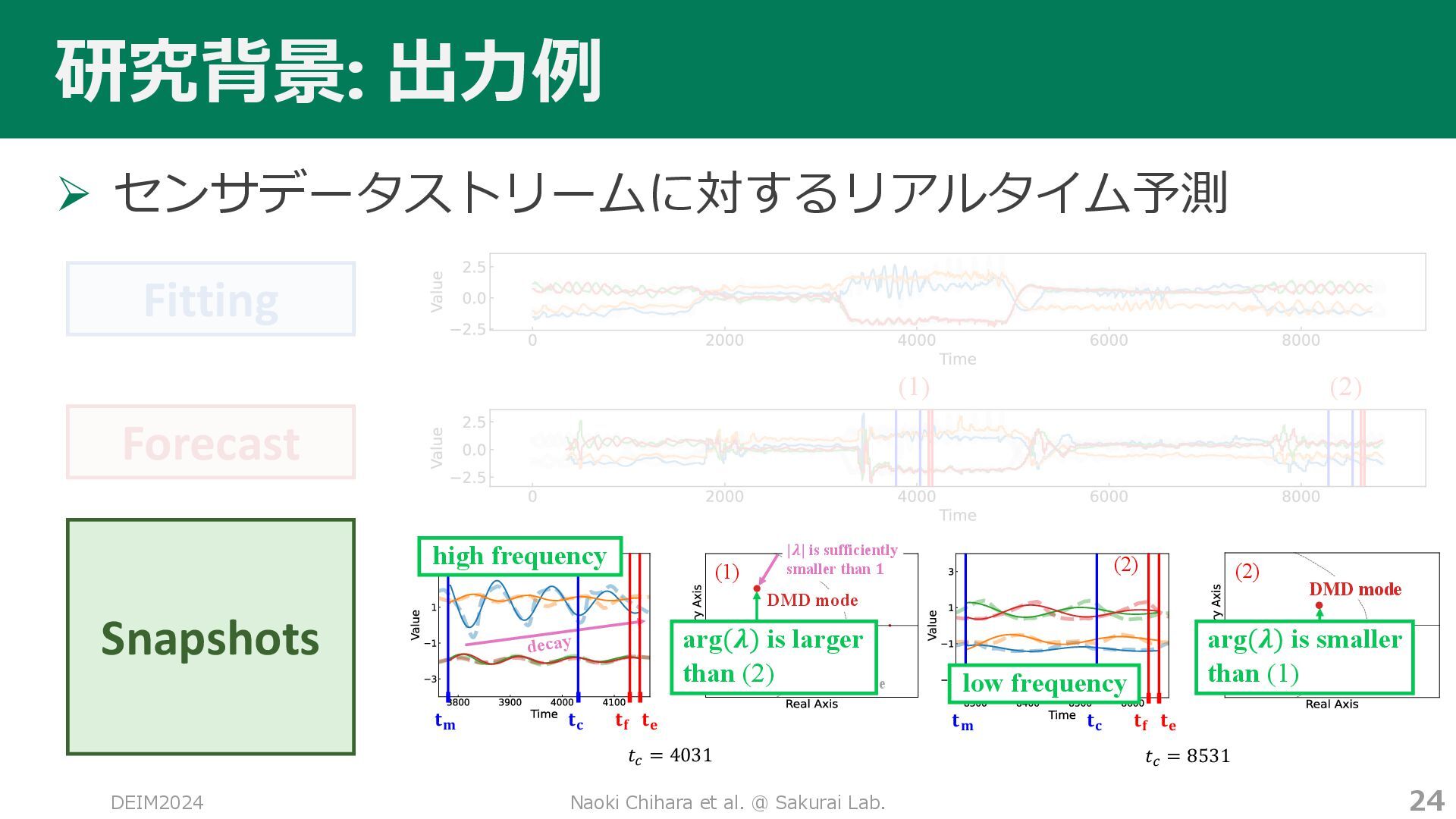
= 4031 high frequency DMD mode |"| is sufficiently smaller than $ arg(") is larger than (2) 研究背景: 出⼒例 Ø センサデータストリームに対するリアルタイム予測 Naoki Chihara et al. @ Sakurai Lab. 24 Fitting Forecast (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=4881 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ DEIM2024 (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm=488 (1) (2) (2) (2) ay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger tm=3781 tm=4881 (1) (2) (2) (2) ecay (1) (1) high frequency DMD mode DMD mode arg(@) is smaller BC |@| is sufficiently smaller than E arg(@) is larger (1) (2) (a) ϞʔγϣϯΠϕϯτετϦʔϜશମ (փ৭ͷۂઢ) ʹର͢ΔϑΟ οςΟϯά݁Ռʢ্ʣٴͼ༧ଌ݁ՌʢԼʣ tm=3781 tm= (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) tm=3781 tm=48 (1) (2) #! #" ## #$ low frequency (2) (2) unit circle #! #" ## #$ decay (1) (1) unit circle $% = 4031 $% = 8531 high frequency DMD mode DMD mode arg(@) is smaller than (1) BC |@| is sufficiently smaller than E arg(@) is larger than (2) (b) ֤࣌ࠁʹ͓͚Δ ls = 100 εςοϓઌͷ༧ଌ݁Ռͷεφοϓγϣ οτٴͼಈతϞʔυʹରԠͨ͠ݻ༗ high frequency low frequency arg(𝝀) is smaller than (1) arg(𝝀) is larger than (2) Snapshots
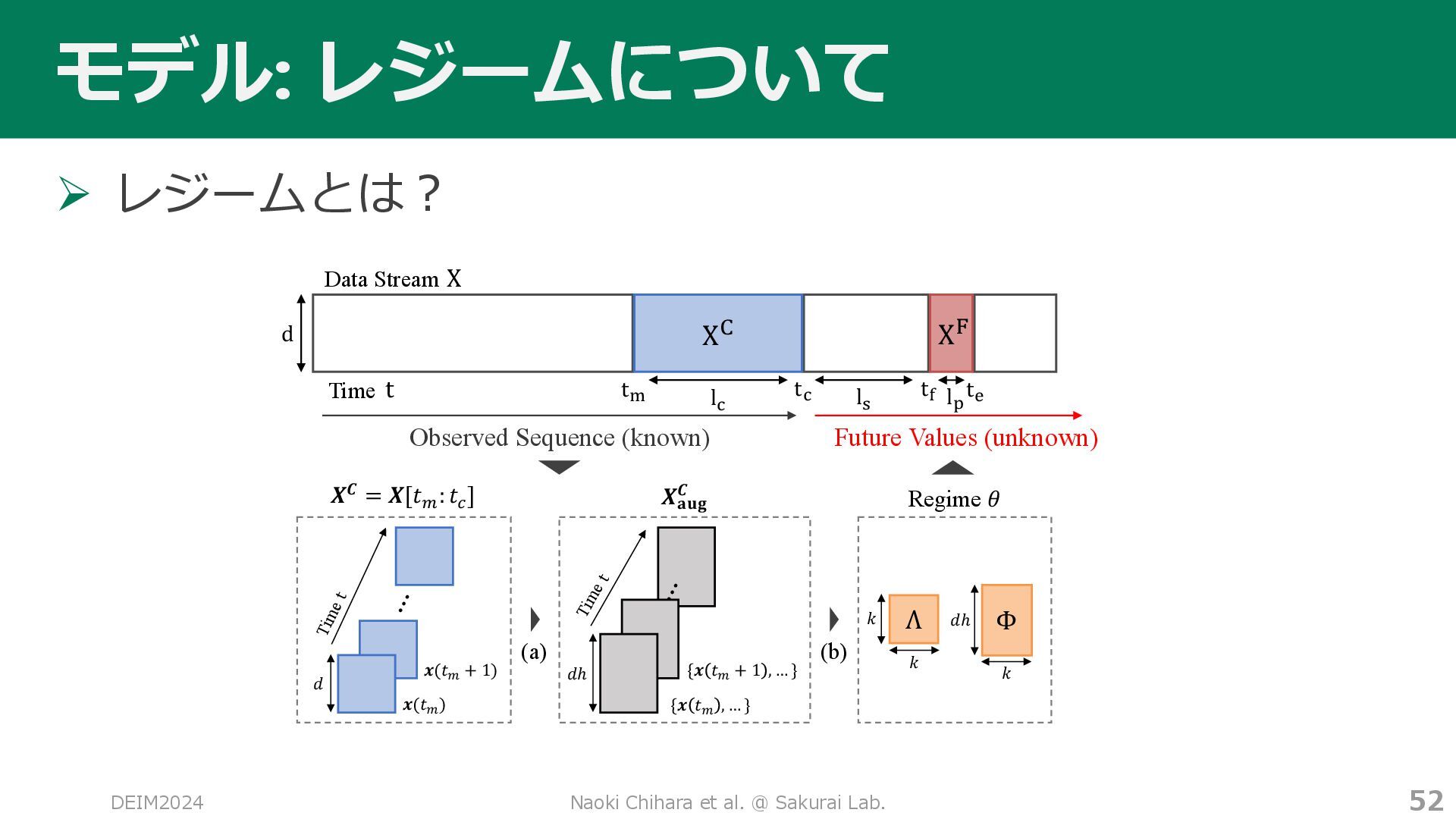
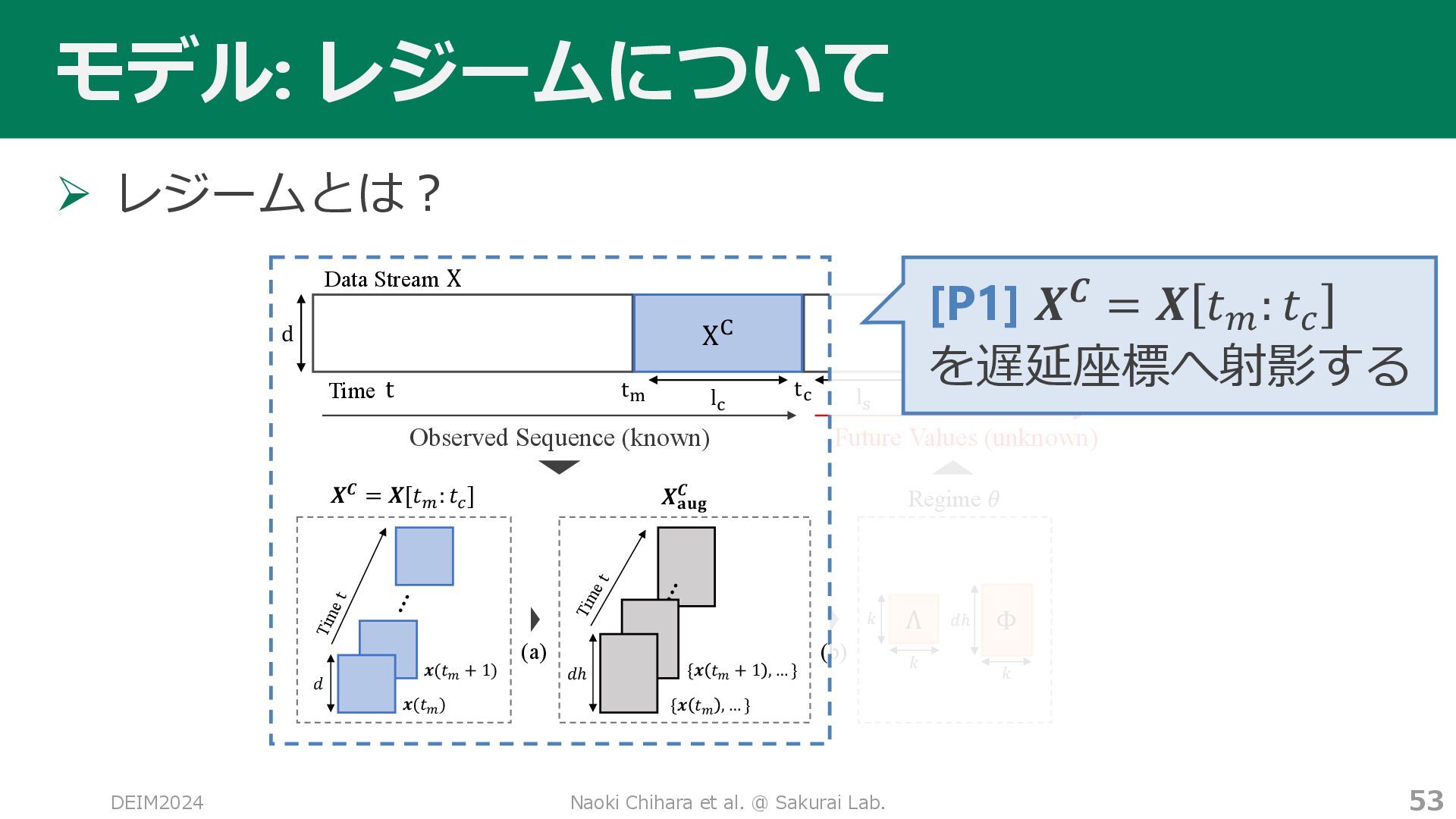
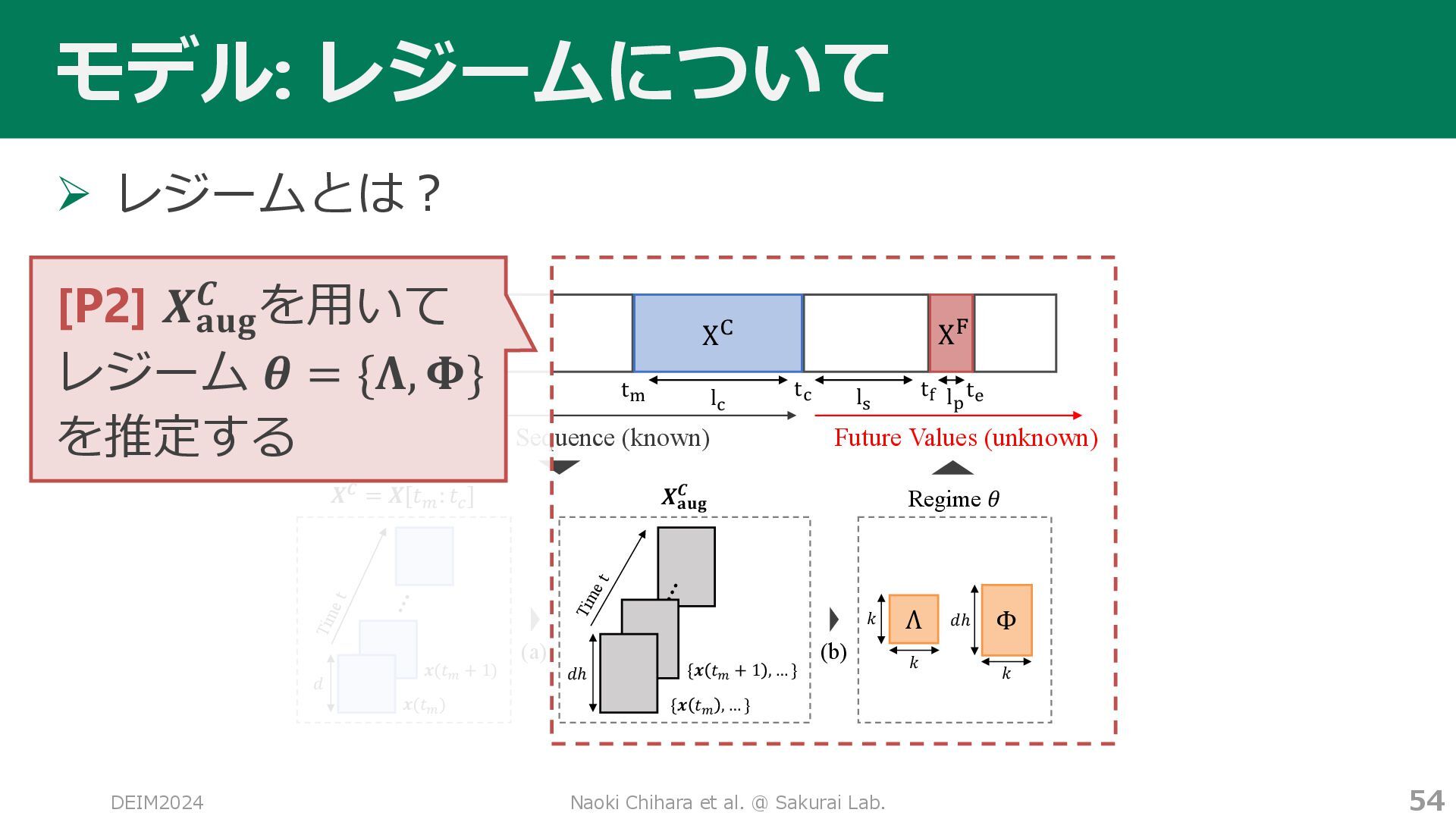
Lab. 52 DEIM2024 X' DMD operator A dh dh U dh k k k V& k l- − h + 1 Φ dh k Λ k k DMD modes DMD eigenvalues l. l- t/ t- t0 t1 l2 X! X" d Future Values (unknown) Observed Sequence (known) Data Stream X t Σ Time ⋮ !!"# $ {" #! , … } {" #! + 1 , … } )ℎ !$ = ![$% : $& ] "(#! ) ⋮ "(#! + 1) Time t ) Regime ' (a) (b) Time t . . )ℎ . Φ Λ
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}