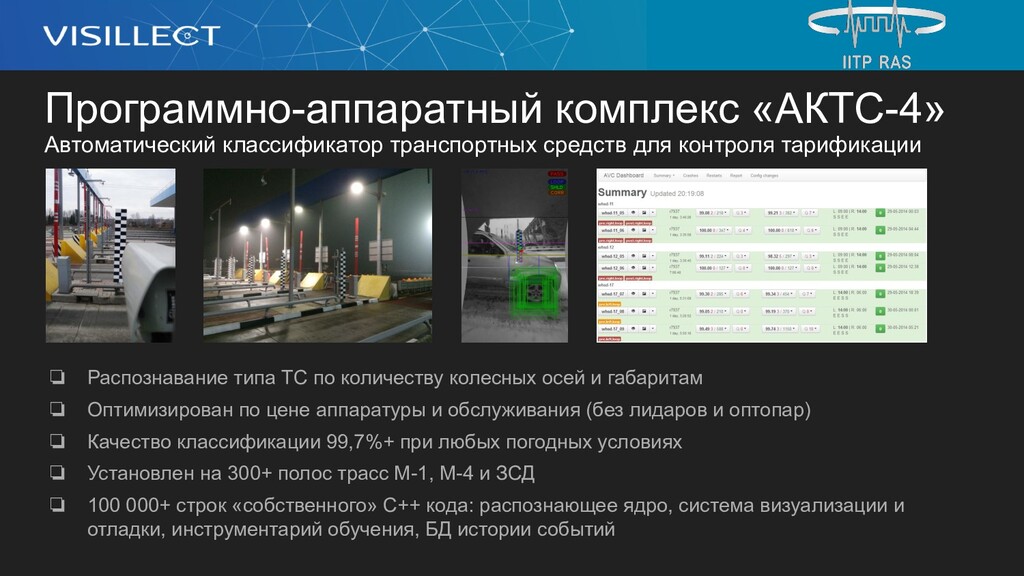
❏ Оптимизирован по цене аппаратуры и обслуживания (без лидаров и оптопар) ❏ Качество классификации 99,7%+ при любых погодных условиях ❏ Установлен на 300+ полос трасс М-1, М-4 и ЗСД ❏ 100 000+ строк «собственного» C++ кода: распознающее ядро, система визуализации и отладки, инструментарий обучения, БД истории событий Автоматический классификатор транспортных средств для контроля тарификации Программно-аппаратный комплекс «АКТС-4»
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![52 Спасибо за внимание! Шипитько Олег [email protected] «Тестирование доказывает наличие](https://files.speakerdeck.com/presentations/a883862ed1d244dfb83bc578a1b73cdb/slide_51.jpg){kind=link}
{kind=link}