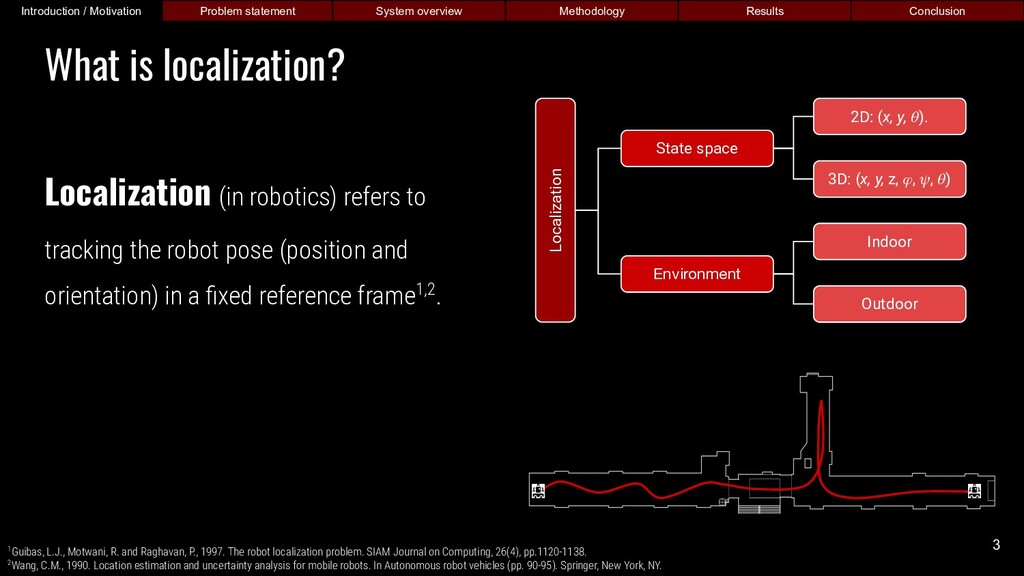
and orientation) in a fixed reference frame1,2. 1Guibas, L.J., Motwani, R. and Raghavan, P., 1997. The robot localization problem. SIAM Journal on Computing, 26(4), pp.1120-1138. 2Wang, C.M., 1990. Location estimation and uncertainty analysis for mobile robots. In Autonomous robot vehicles (pp. 90-95). Springer, New York, NY. Localization State space Environment 2D: (x, y, ). 3D: (x, y, z, , , ) Indoor Outdoor Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion What is localization? 3
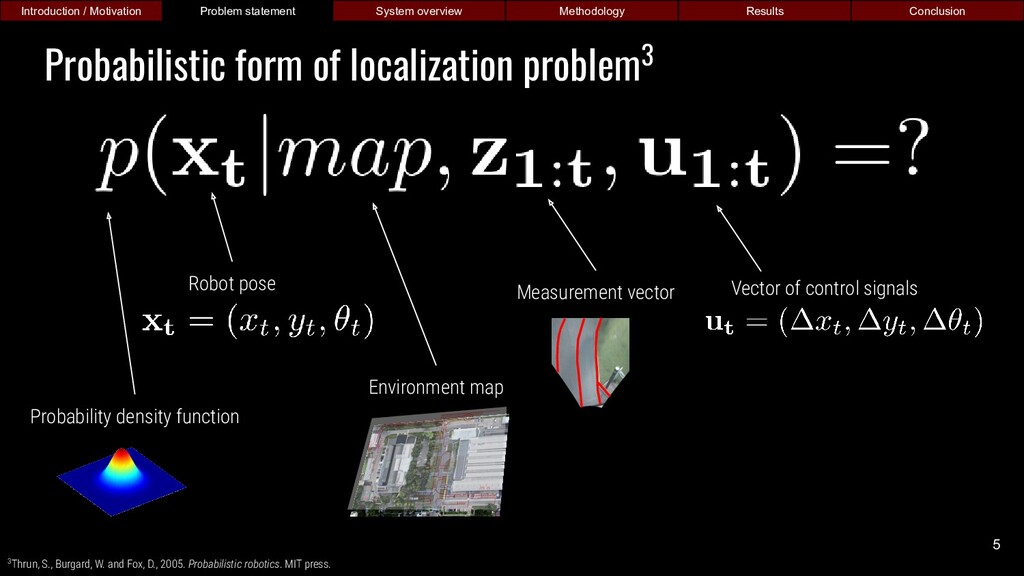
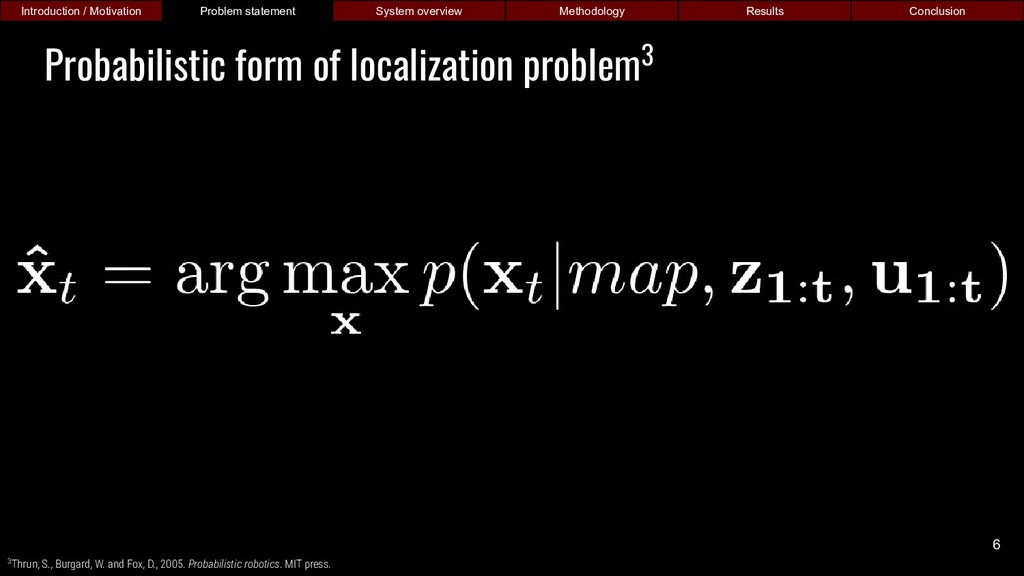
3Thrun, S., Burgard, W. and Fox, D., 2005. Probabilistic robotics. MIT press. Probabilistic form of localization problem3 Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion 5 Probability density function
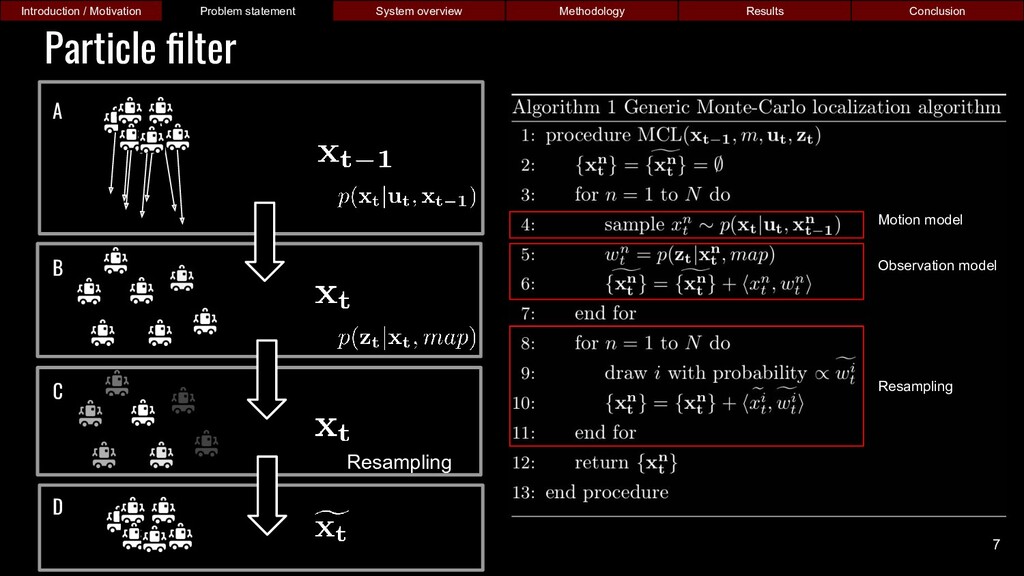
Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion Resampling Motion model Observation model Resampling A B C D 7
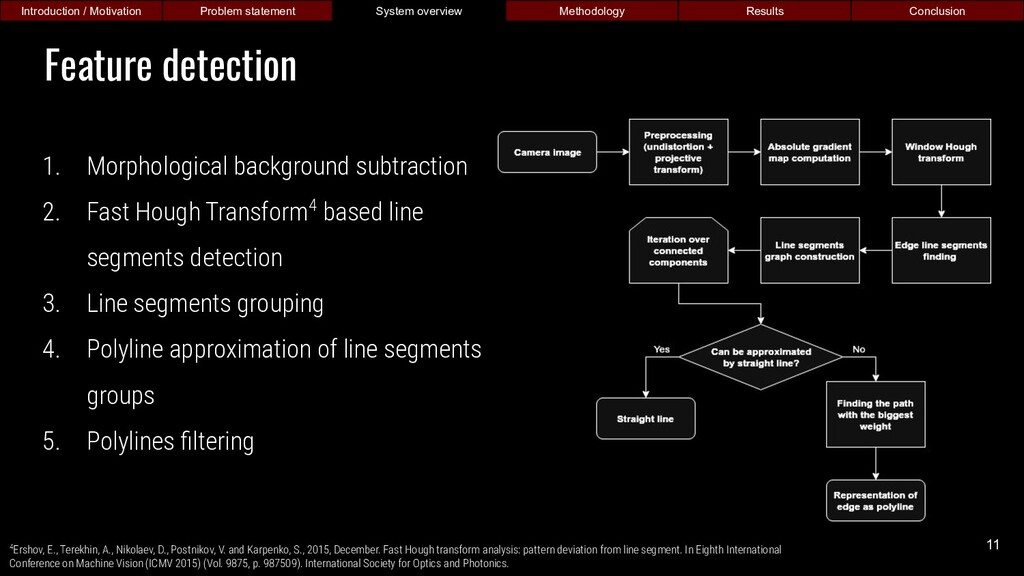
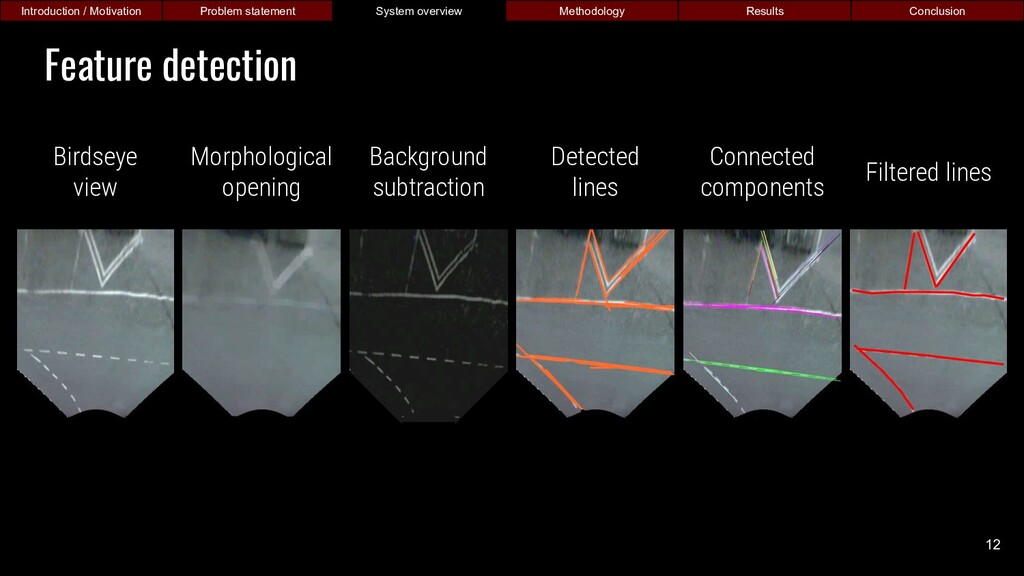
Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion 1. Morphological background subtraction 2. Fast Hough Transform4 based line segments detection 3. Line segments grouping 4. Polyline approximation of line segments groups 5. Polylines filtering 4Ershov, E., Terekhin, A., Nikolaev, D., Postnikov, V. and Karpenko, S., 2015, December. Fast Hough transform analysis: pattern deviation from line segment. In Eighth International Conference on Machine Vision (ICMV 2015) (Vol. 9875, p. 987509). International Society for Optics and Photonics. 11
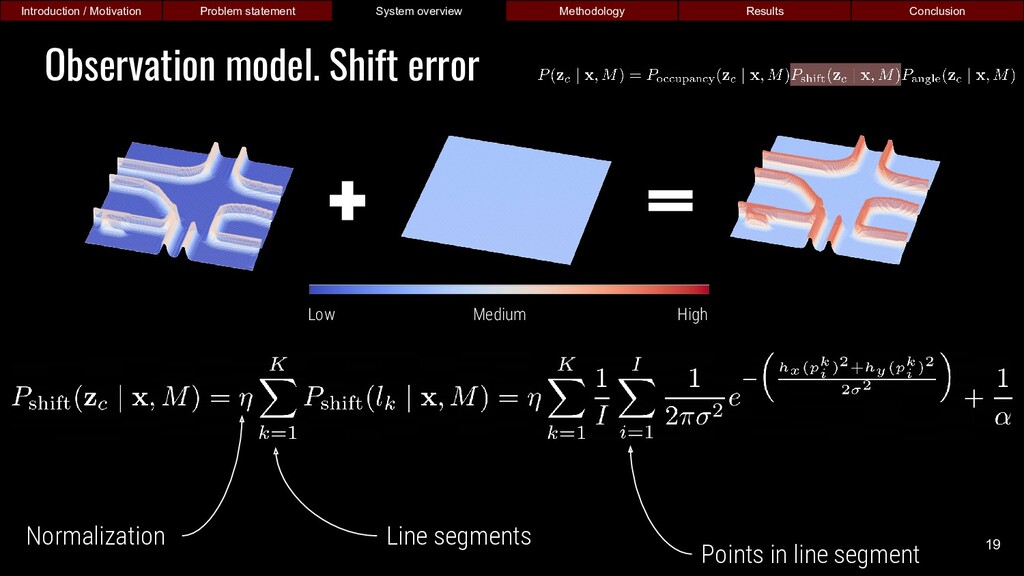
Sliding window Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion 19 Low Medium High Line segments Normalization Points in line segment
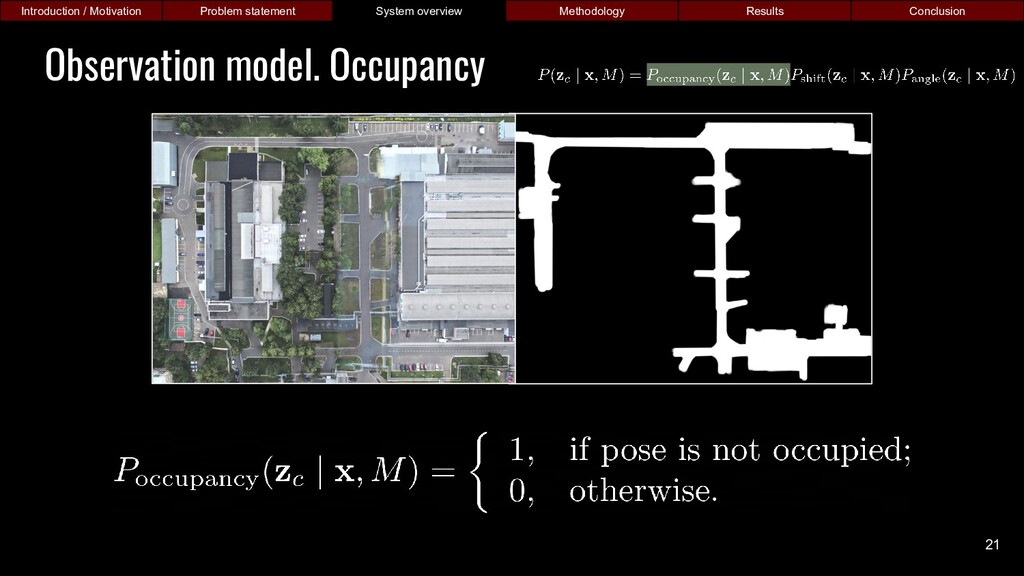
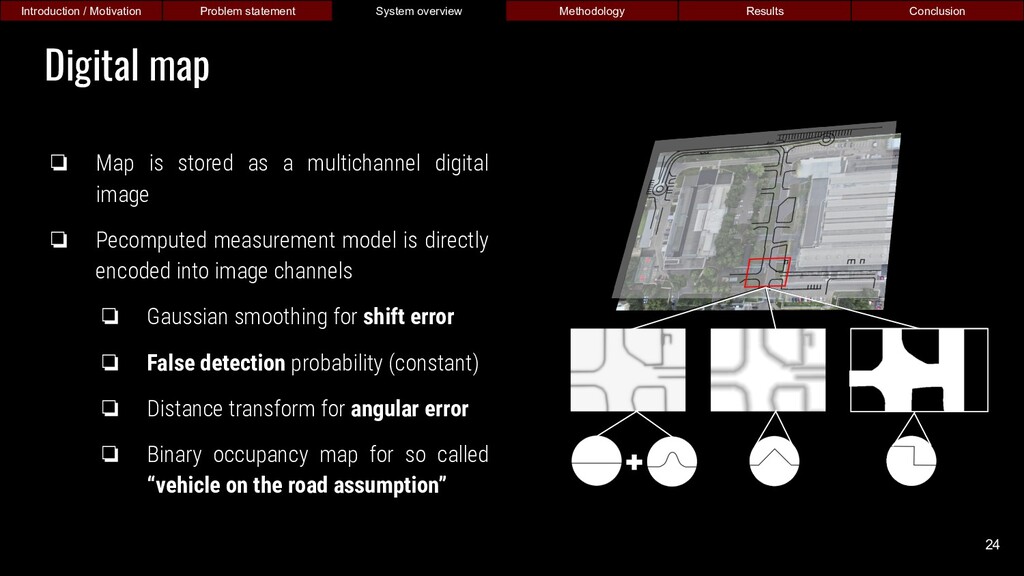
Pecomputed measurement model is directly encoded into image channels ❏ Gaussian smoothing for shift error ❏ False detection probability (constant) ❏ Distance transform for angular error ❏ Binary occupancy map for so called “vehicle on the road assumption” Digital map Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion 24
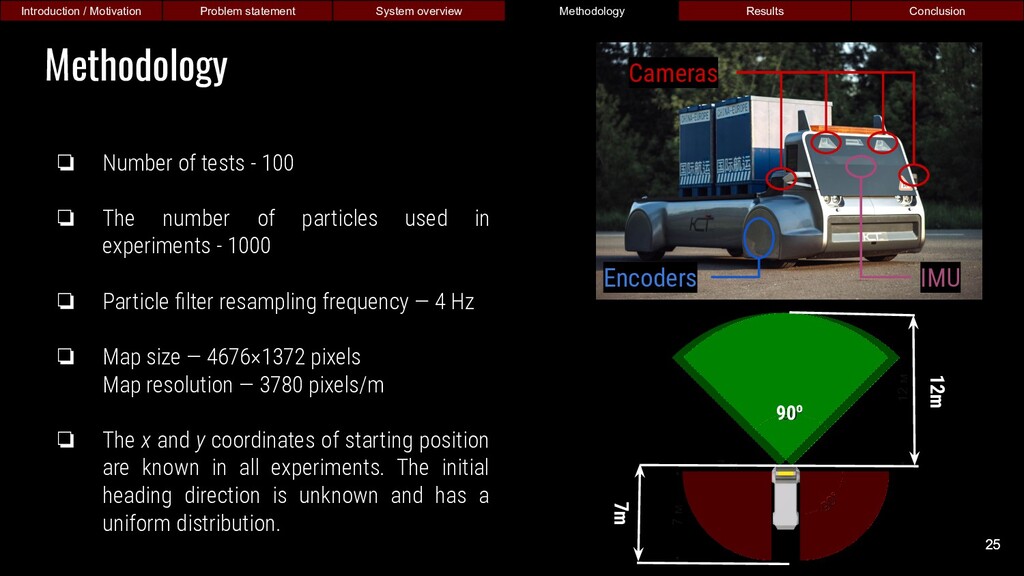
particles used in experiments - 1000 ❏ Particle filter resampling frequency — 4 Hz ❏ Map size — 4676×1372 pixels Map resolution — 3780 pixels/m ❏ The x and y coordinates of starting position are known in all experiments. The initial heading direction is unknown and has a uniform distribution. Methodology Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion Cameras Encoders IMU 25 25 90o 12m 7m
Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion Results (2/2) longitudinal MAE did not change 12% decrease for lateral MAE 15% decrease for angular MAE 27 MAE - Mean Absolute Error Max - Maximum Absolute Error 15% decrease of the longitudinal Max 12% increase of the lateral Max 19% decrease of the angular Max
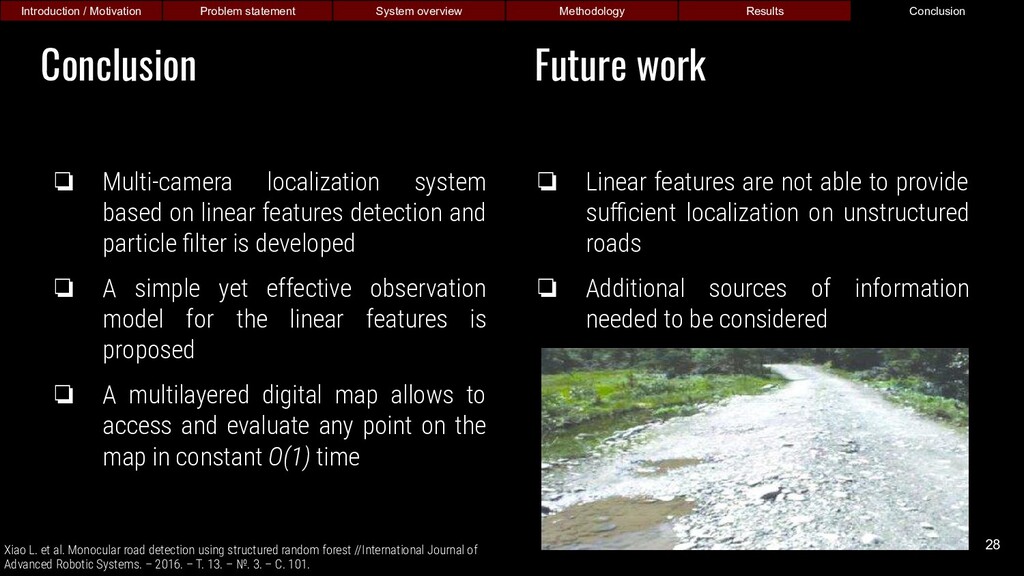
particle filter is developed ❏ A simple yet effective observation model for the linear features is proposed ❏ A multilayered digital map allows to access and evaluate any point on the map in constant O(1) time Future work ❏ Linear features are not able to provide sufficient localization on unstructured roads ❏ Additional sources of information needed to be considered Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement Sliding window Methodology Results Conclusion Introduction / Motivation Problem statement Methodology Sliding window Results Conclusion Introduction / Motivation Problem statement System overview Methodology Results Conclusion Conclusion 28 Xiao L. et al. Monocular road detection using structured random forest //International Journal of Advanced Robotic Systems. – 2016. – Т. 13. – №. 3. – С. 101.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}