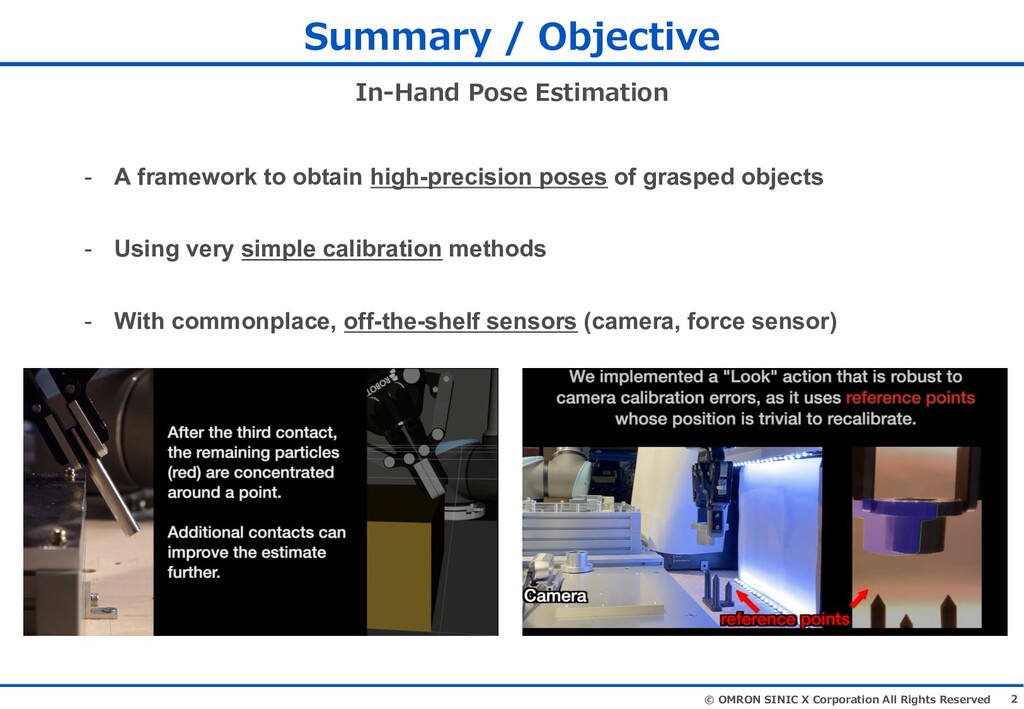
A framework to obtain high-precision poses of grasped objects - Using very simple calibration methods - With commonplace, off-the-shelf sensors (camera, force sensor) In-Hand Pose Estimation Summary / Objective
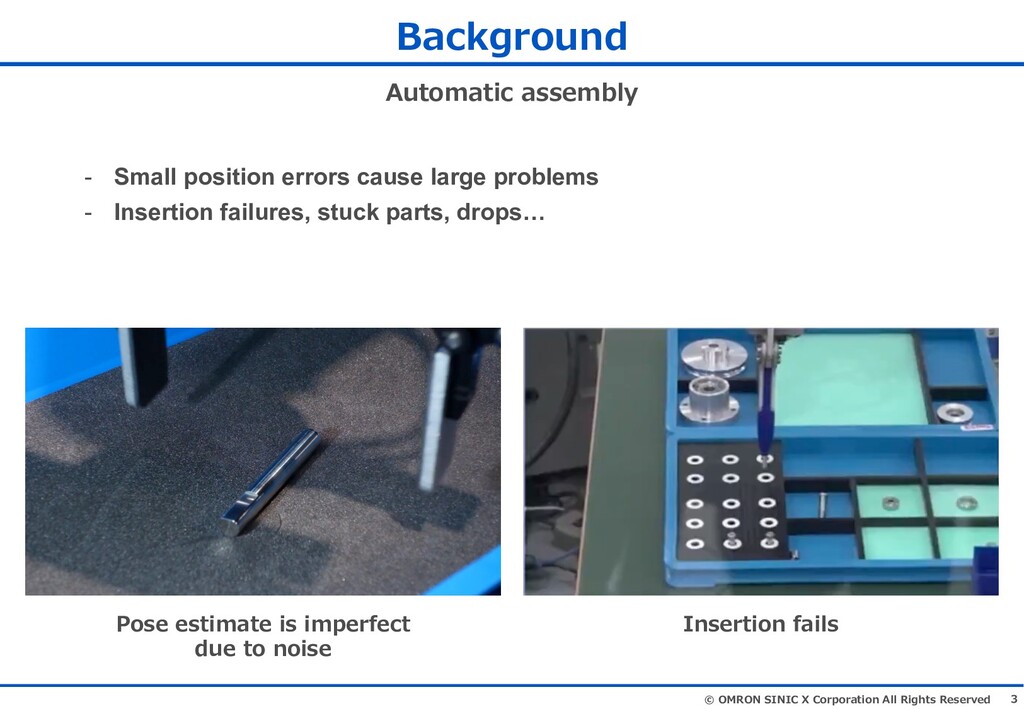
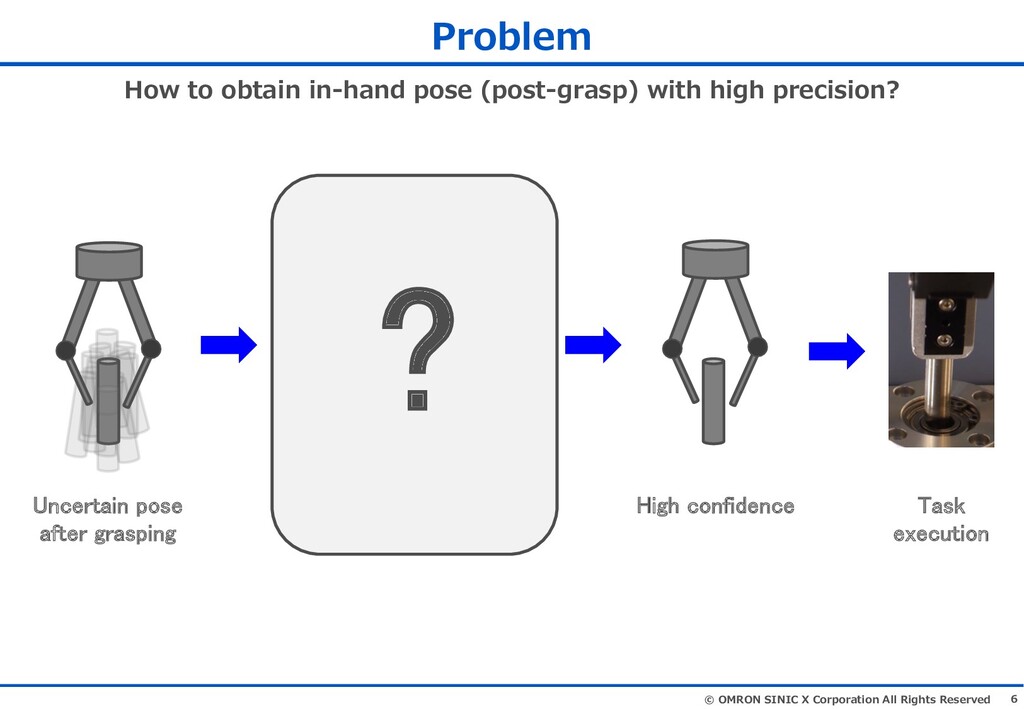
Small position errors cause large problems - Insertion failures, stuck parts, drops… Automatic assembly Background Pose estimate is imperfect due to noise Insertion fails
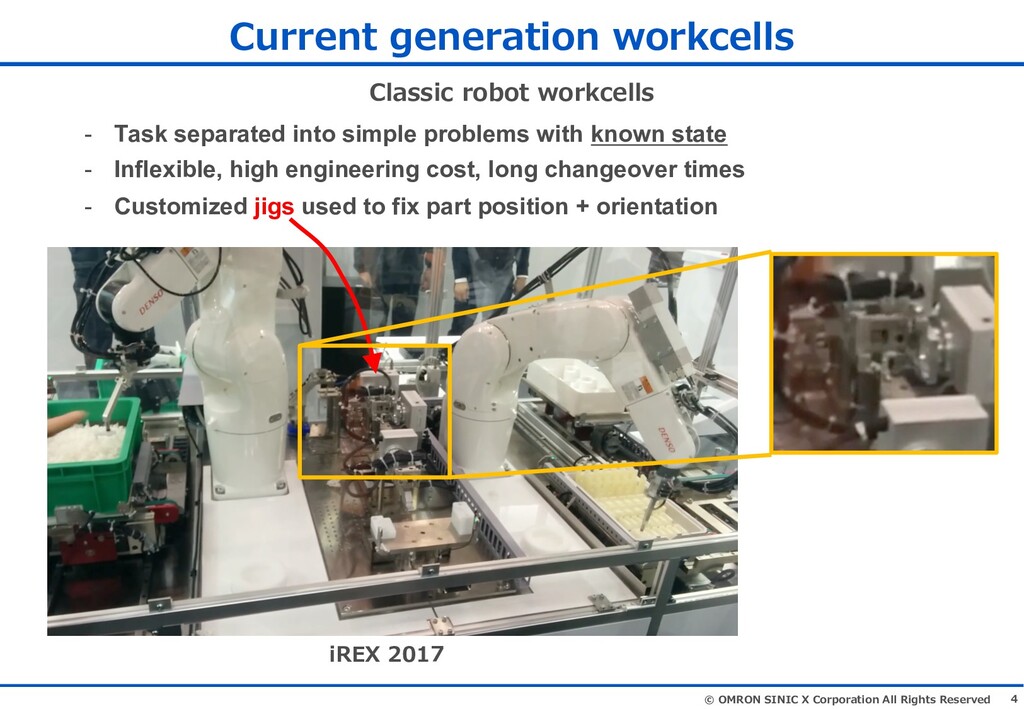
Task separated into simple problems with known state - Inflexible, high engineering cost, long changeover times - Customized jigs used to fix part position + orientation Classic robot workcells Current generation workcells iREX 2017
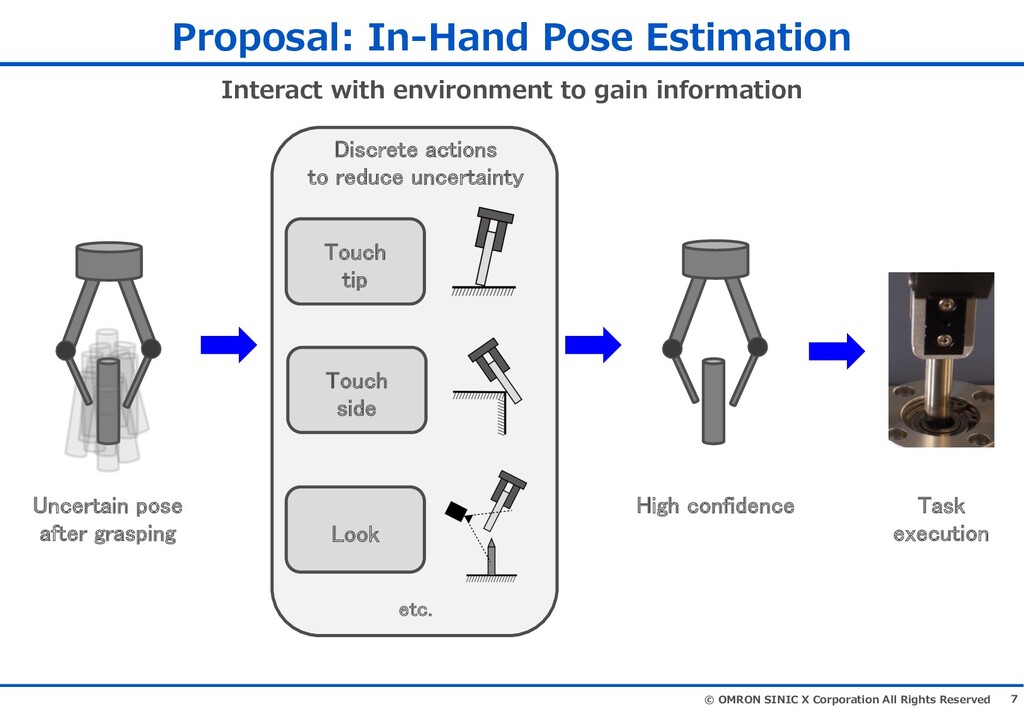
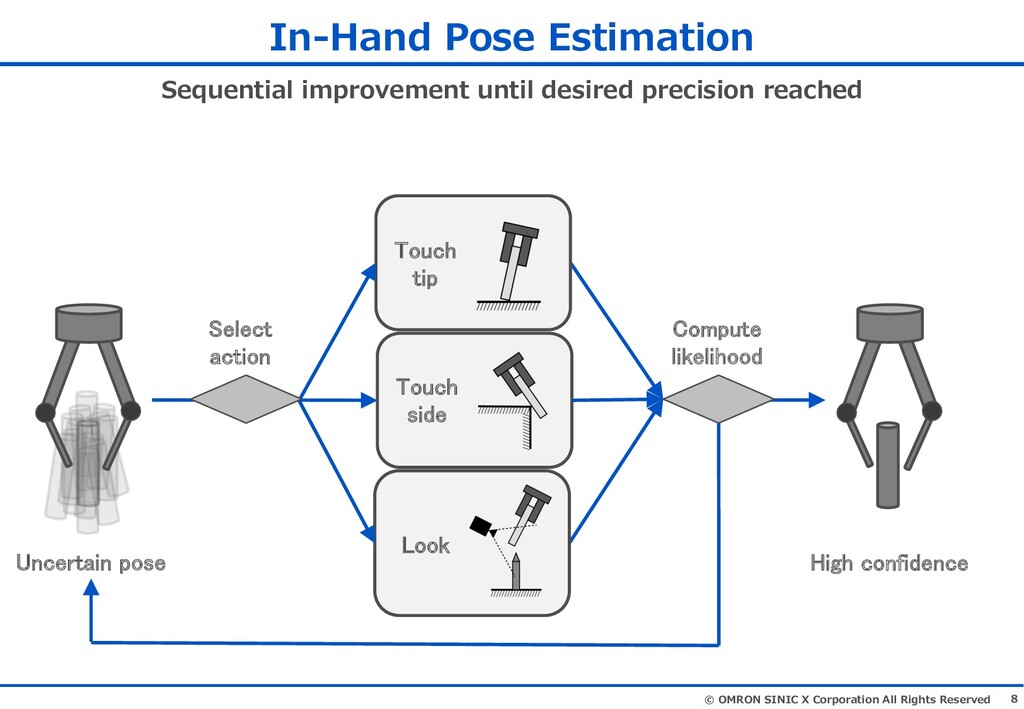
In-Hand Pose Estimation Uncertain pose after grasping High confidence Touch tip etc. Task execution Touch side Discrete actions to reduce uncertainty Interact with environment to gain information Look
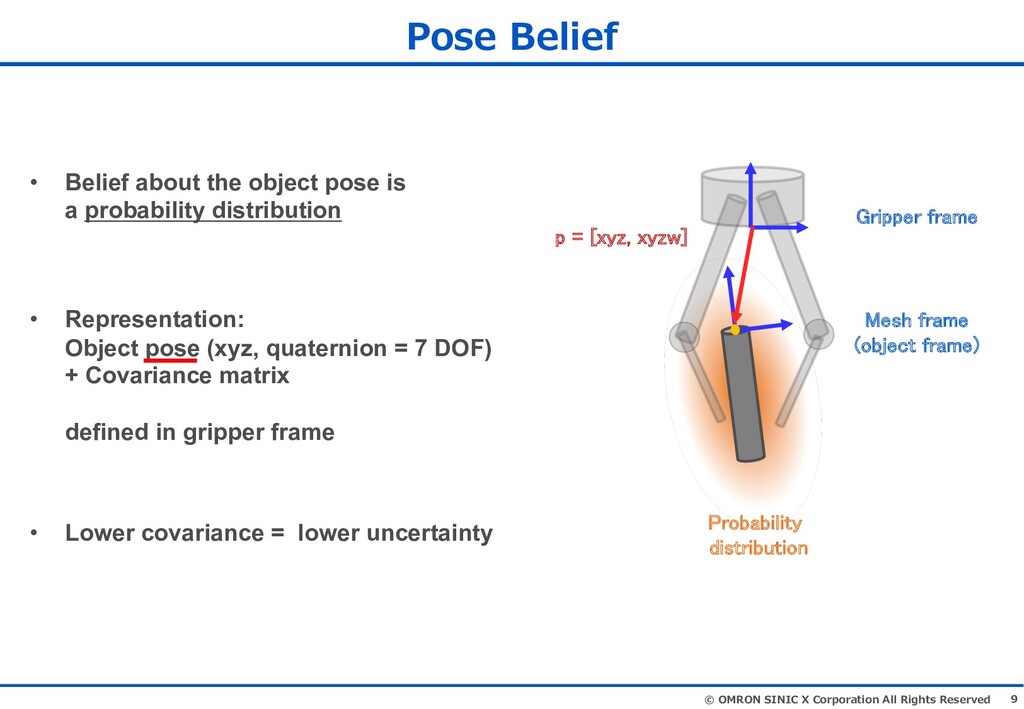
Belief about the object pose is a probability distribution • Representation: Object pose (xyz, quaternion = 7 DOF) + Covariance matrix defined in gripper frame • Lower covariance = lower uncertainty Pose Belief p = [xyz, xyzw] Gripper frame Mesh frame (object frame) Probability distribution
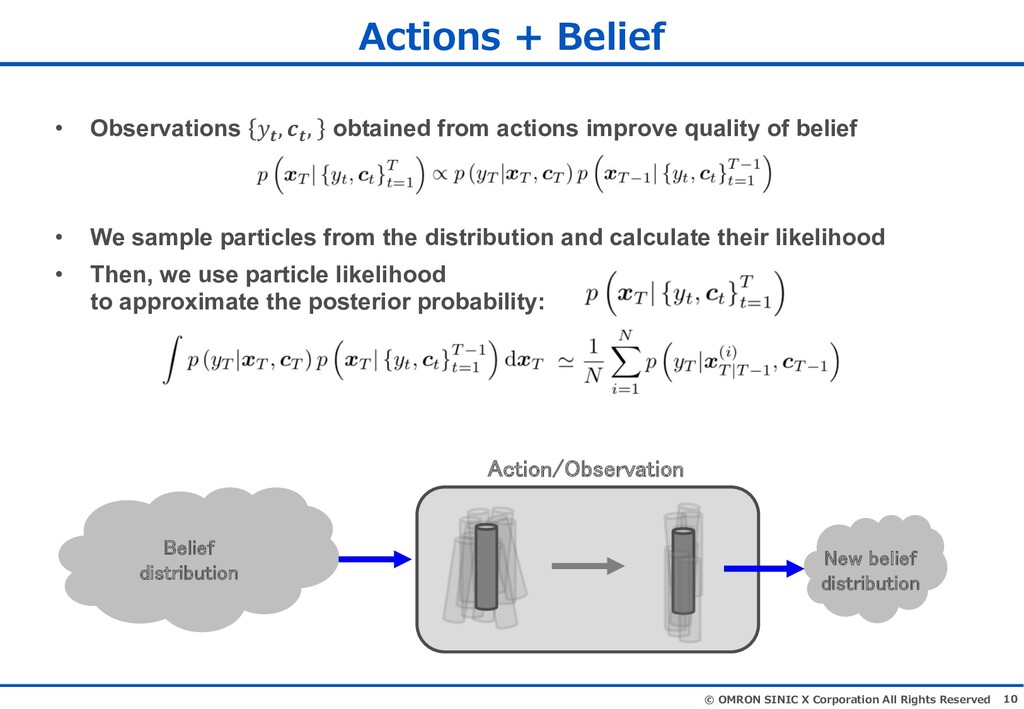
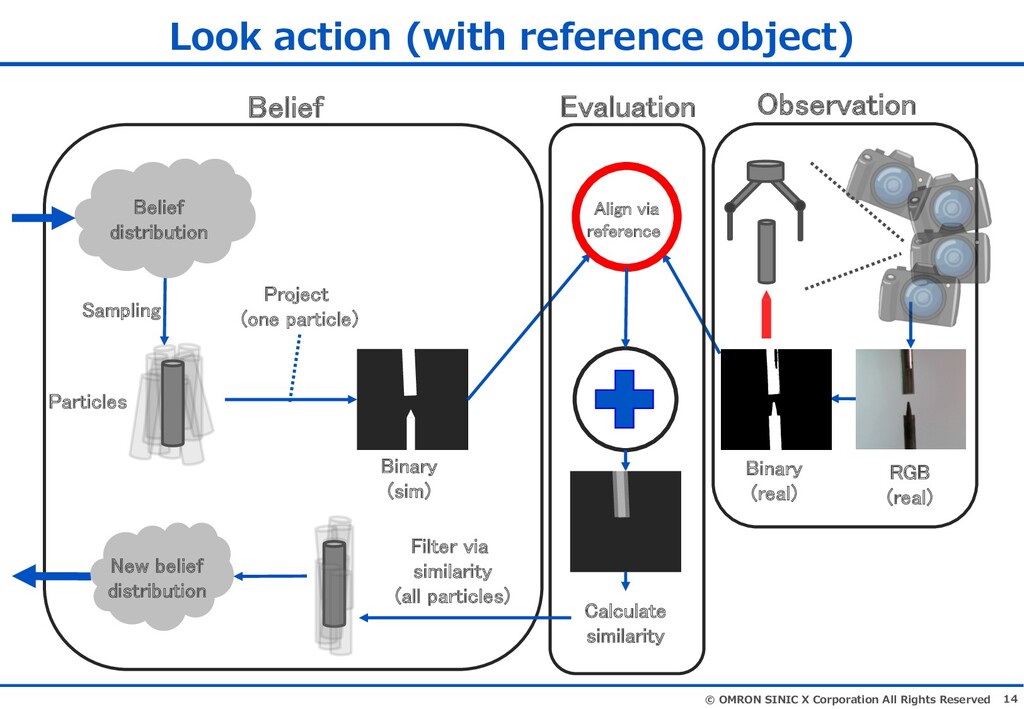
Observations 𝑦𝒕 , 𝒄𝒕 , obtained from actions improve quality of belief • We sample particles from the distribution and calculate their likelihood • Then, we use particle likelihood to approximate the posterior probability: Actions + Belief Belief distribution New belief distribution Action/Observation
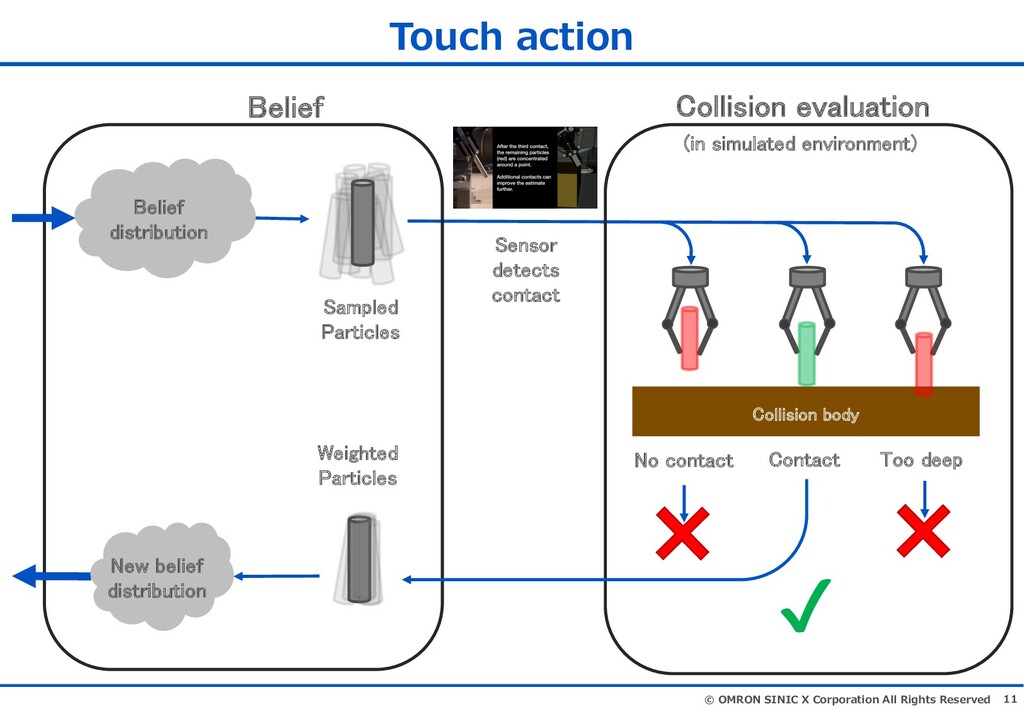
action Belief distribution Sampled Particles Belief Collision evaluation New belief distribution Weighted Particles Collision body Sensor detects contact (in simulated environment) No contact Too deep Contact ✔
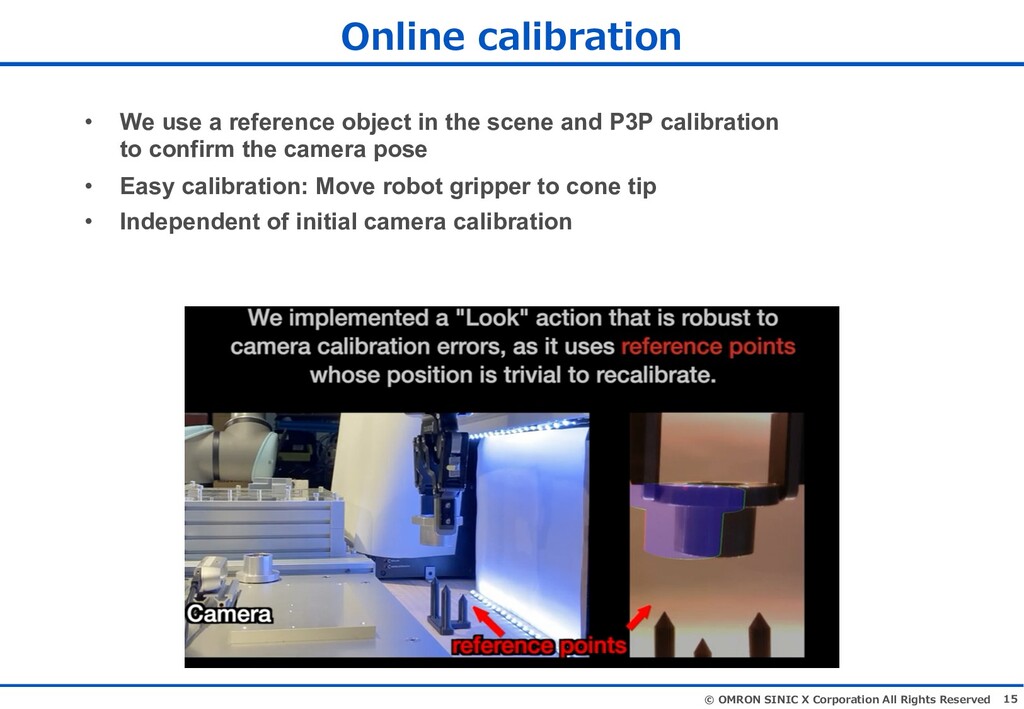
We use a reference object in the scene and P3P calibration to confirm the camera pose • Easy calibration: Move robot gripper to cone tip • Independent of initial camera calibration Online calibration
We grasped three objects in 4 different orientations and positions, and used Look and Touch actions to determine their in-hand pose - Compared: Precision for different poses, objects, number of particles order of actions Experiments Grasp poses and depths
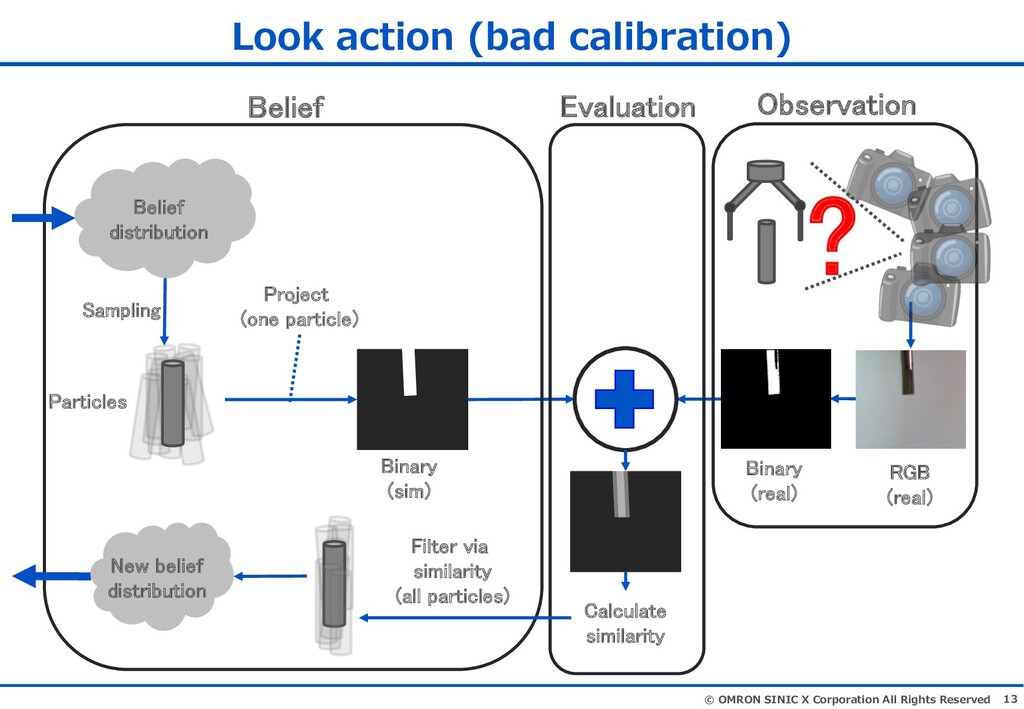
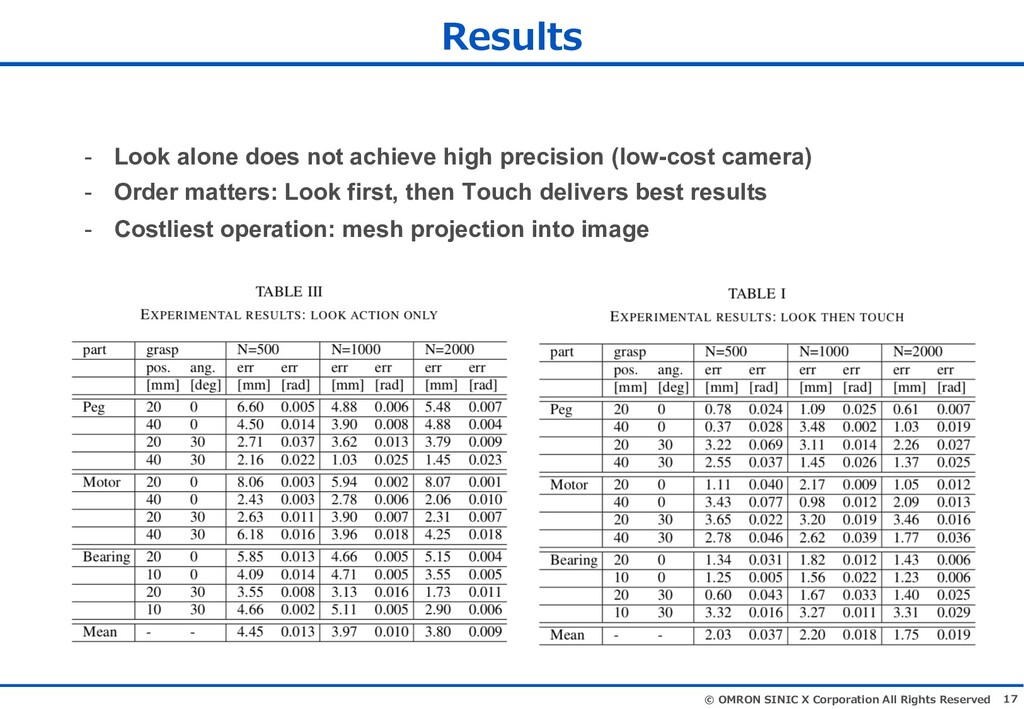
Look alone does not achieve high precision (low-cost camera) - Order matters: Look first, then Touch delivers best results - Costliest operation: mesh projection into image Results
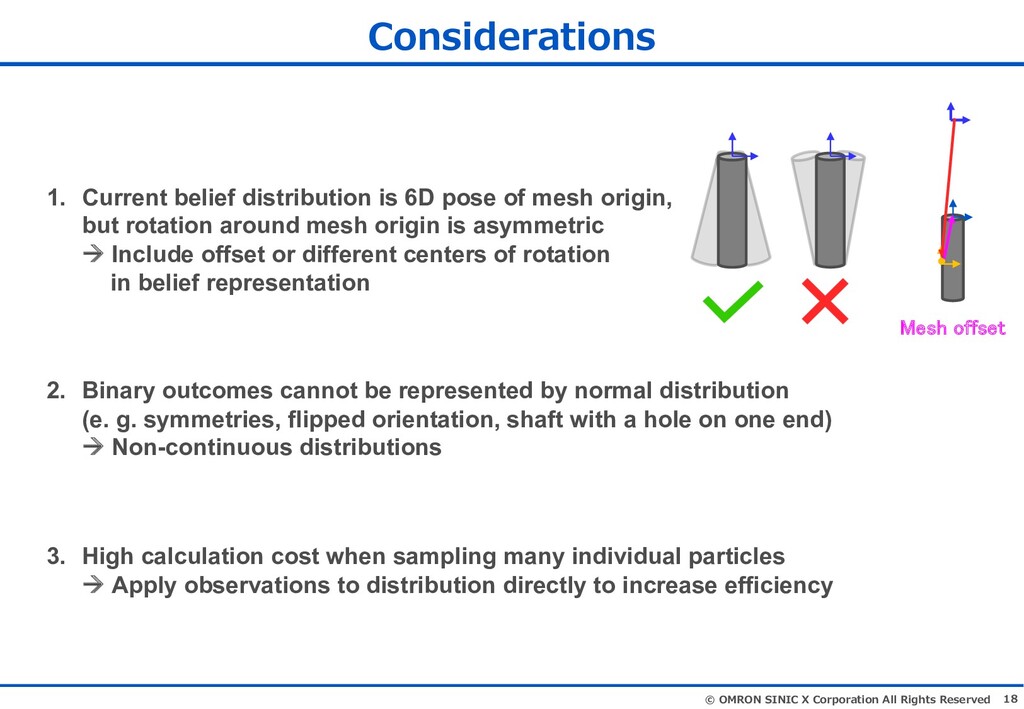
Current belief distribution is 6D pose of mesh origin, but rotation around mesh origin is asymmetric à Include offset or different centers of rotation in belief representation 2. Binary outcomes cannot be represented by normal distribution (e. g. symmetries, flipped orientation, shaft with a hole on one end) à Non-continuous distributions 3. High calculation cost when sampling many individual particles à Apply observations to distribution directly to increase efficiency Considerations Mesh offset
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}