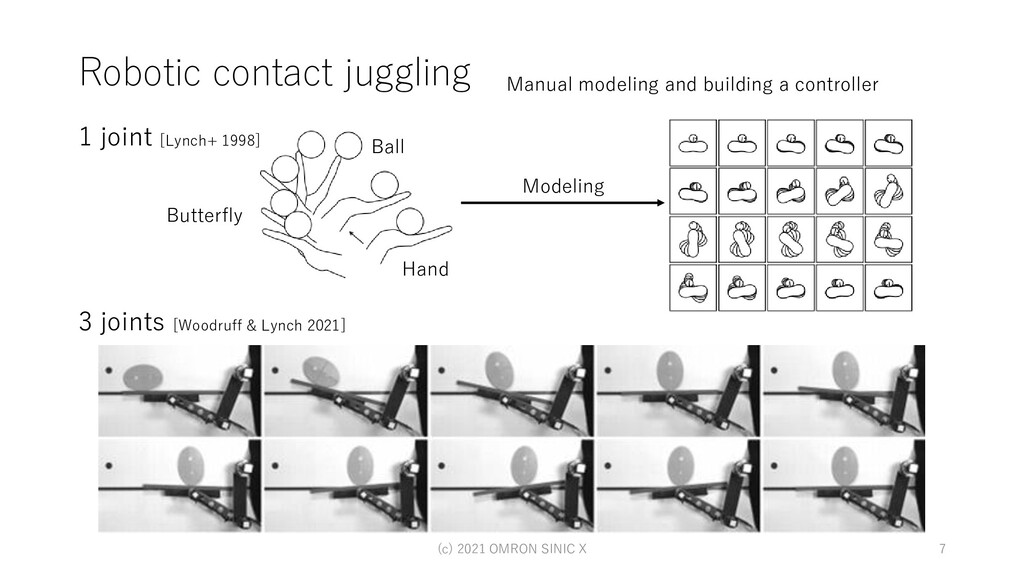
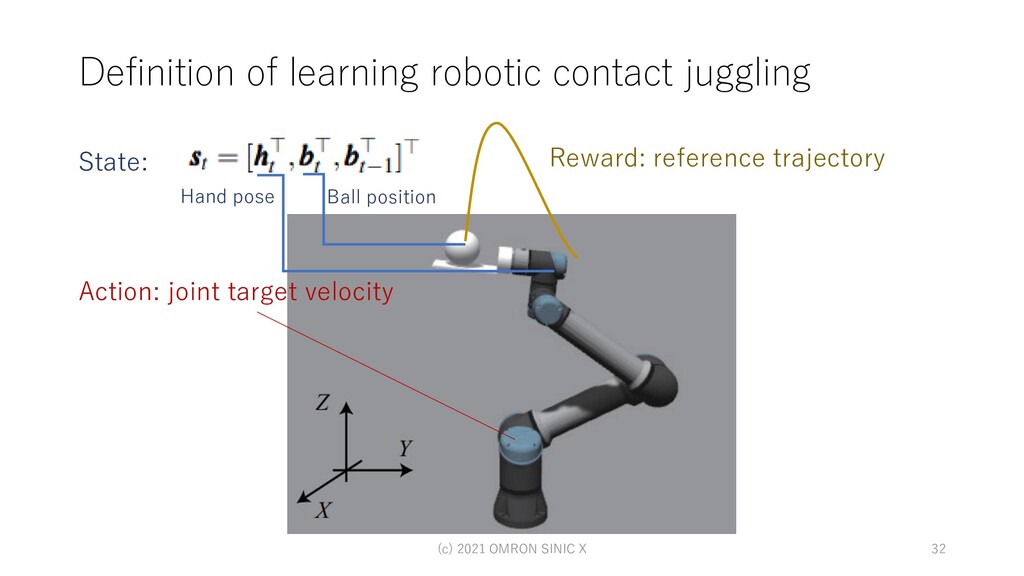
Learning Robotic Contact Juggling (IROS'21)
Kazutoshi Tanaka, Masashi Hamaya, Devwrat Joshi, Felix von Drigalski, Ryo Yonetani, Takamitsu Matsubara, and Yoshihisa Ijiri
Presented at International Conference on Intelligent Robots and Systems (IROS 2021)
September 27, 2021
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}